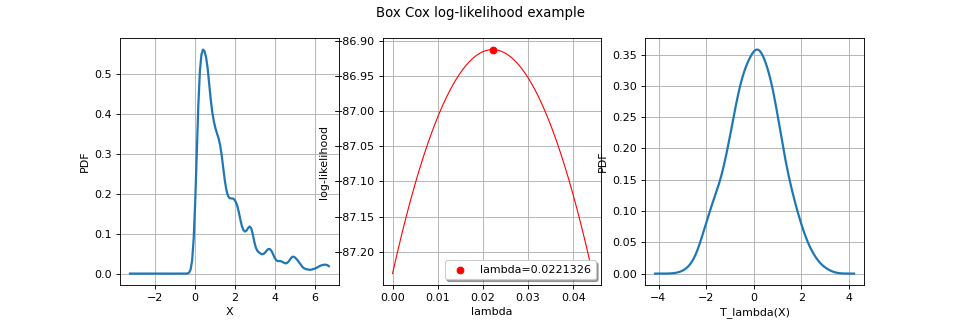
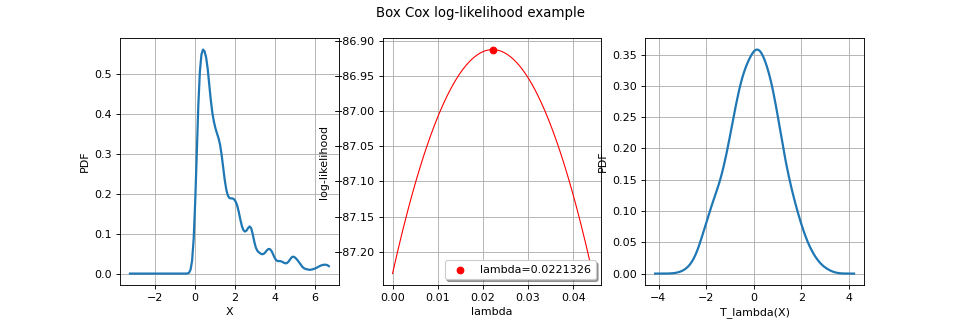
BoxCoxFactory¶
(Source code, png)
{kind=link}
- class BoxCoxFactory(*args)¶
BoxCox transformation estimator.
Notes
The class
BoxCoxFactoryenables to build a Box Cox transformation from data.The Box Cox transformation
 maps a sample into a new sample following a normal distribution with independent components. That sample may be the realization of a process as well as the realization of a distribution.
maps a sample into a new sample following a normal distribution with independent components. That sample may be the realization of a process as well as the realization of a distribution.In the multivariate case, we proceed component by component:
 which writes:
which writes:
for all
 .
.BoxCox transformation could also be performed in the case of the estimation of a general linear model through
GeneralLinearModelAlgorithm. The objective is to estimate the most likely surrogate model (general linear model) which links input data and
and  .
.  are to be calibrated such as maximizing the general linear model’s likelihood function. In that context, a
are to be calibrated such as maximizing the general linear model’s likelihood function. In that context, a CovarianceModeland aBasishave to be fixedMethods
build(*args)Estimate the Box Cox transformation.
buildWithGLM(*args)Estimate the Box Cox transformation with general linear model.
buildWithGraph(*args)Estimate the Box Cox transformation with graph output.
buildWithLM(*args)Estimate the Box Cox transformation with linear model.
Accessor to the object's name.
getName()Accessor to the object's name.
Accessor to the solver.
hasName()Test if the object is named.
setName(name)Accessor to the object's name.
setOptimizationAlgorithm(solver)Accessor to the solver.
- __init__(*args)¶
- build(*args)¶
Estimate the Box Cox transformation.
- Parameters:
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- transform
Notes
We describe the estimation in the univariate case, in the case of no surrogate model estimate. Only the parameter
 is estimated. To clarify the notations, we omit the mention of
is estimated. To clarify the notations, we omit the mention of  in
in  .
.We note
 a sample of
a sample of  . We suppose that
. We suppose that  .
.The parameters
 are estimated by the maximum likelihood estimators. We note
are estimated by the maximum likelihood estimators. We note  and
and  respectively the cumulative distribution function and the density probability function of the
respectively the cumulative distribution function and the density probability function of the  distribution.
distribution.We have :

from which we derive the density probability function p of
:
which enables to write the likelihood of the values
:![\begin{array}{lcl}
L(\beta,\sigma,\lambda)
& = &
\underbrace{ \frac{1}{(2\pi)^{N/2}}
\times
\frac{1}{(\sigma^2)^{N/2}}
\times
\exp\left[
-\frac{1}{2\sigma^2}
\sum_{k=0}^{N-1}
\left(
h_\lambda(x_k)-\beta
\right)^2
\right]
}_{\Psi(\beta, \sigma)}
\times
\prod_{k=0}^{N-1} x_k^{\lambda - 1}
\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMyAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPSc0MDcuOTMyOTUxcHQnIGhlaWdodD0nNTMuNTk0ODAzcHQnIHZpZXdCb3g9JzQuOTgxMzM1IC01NC43OTAzMTcgNDA3LjkzMjk1MSA1My41OTQ4MDMnPgo8ZGVmcz4KPHBhdGggaWQ9J2cxLTAnIGQ9J001LjU3MTEwOC0xLjgwOTIxNUM1LjY5ODYzLTEuODA5MjE1IDUuODczOTczLTEuODA5MjE1IDUuODczOTczLTEuOTkyNTI4UzUuNjk4NjMtMi4xNzU4NDEgNS41NzExMDgtMi4xNzU4NDFIMS4wMDQyMzRDLjg3NjcxMi0yLjE3NTg0MSAuNzAxMzctMi4xNzU4NDEgLjcwMTM3LTEuOTkyNTI4Uy44NzY3MTItMS44MDkyMTUgMS4wMDQyMzQtMS44MDkyMTVINS41NzExMDhaJy8+CjxwYXRoIGlkPSdnMC0zNCcgZD0nTTMuMjg3NjcxIDM1LjM3NTM0Mkg2LjgyNjQwMVYzNC42MzQxMjJINC4wMjg4OTJWLjI2MzAxNEg2LjgyNjQwMVYtLjQ3ODIwN0gzLjI4NzY3MVYzNS4zNzUzNDJaJy8+CjxwYXRoIGlkPSdnMC0zNScgZD0nTTIuOTI5MDE2IDM0LjYzNDEyMkguMTMxNTA3VjM1LjM3NTM0MkgzLjY3MDIzN1YtLjQ3ODIwN0guMTMxNTA3Vi4yNjMwMTRIMi45MjkwMTZWMzQuNjM0MTIyWicvPgo8cGF0aCBpZD0nZzAtODEnIGQ9J000LjI5MTkwNSAxMS45NTUxNjhWMTEuNDc2OTYxQzMuMDYwNTIzIDExLjQ3Njk2MSAzLjA2MDUyMyAxMC44OTExNTggMy4wNjA1MjMgMTAuNTMyNTAzVi40NzgyMDdIOC4yMTMyVjEwLjUzMjUwM0M4LjIxMzIgMTAuODkxMTU4IDguMjEzMiAxMS40NzY5NjEgNi45ODE4MTggMTEuNDc2OTYxVjExLjk1NTE2OEgxMC42MDQyMzRWMTEuNDc2OTYxQzkuMzcyODUyIDExLjQ3Njk2MSA5LjM3Mjg1MiAxMC44OTExNTggOS4zNzI4NTIgMTAuNTMyNTAzVjEuNDIyNjY1QzkuMzcyODUyIDEuMDY0MDEgOS4zNzI4NTIgLjQ3ODIwNyAxMC42MDQyMzQgLjQ3ODIwN1YwSC42Njk0ODlWLjQ3ODIwN0MxLjkwMDg3MiAuNDc4MjA3IDEuOTAwODcyIDEuMDY0MDEgMS45MDA4NzIgMS40MjI2NjVWMTAuNTMyNTAzQzEuOTAwODcyIDEwLjg5MTE1OCAxLjkwMDg3MiAxMS40NzY5NjEgLjY2OTQ4OSAxMS40NzY5NjFWMTEuOTU1MTY4SDQuMjkxOTA1WicvPgo8cGF0aCBpZD0nZzAtODgnIGQ9J00xNS4xMzUyNDMgMTYuNzM3MjM1TDE2LjU4MTgxOCAxMi45MTE1ODJIMTYuMjgyOTM5QzE1LjgxNjY4NyAxNC4xNTQ5MTkgMTQuNTQ5NDQgMTQuOTY3ODcgMTMuMTc0NTk1IDE1LjMyNjUyNkMxMi45MjM1MzcgMTUuMzg2MzAxIDExLjc1MTkzIDE1LjY5NzEzNiA5LjQ1NjUzOCAxNS42OTcxMzZIMi4yNDc1NzJMOC4zMzI3NTIgOC41NTk5QzguNDE2NDM4IDguNDY0MjU5IDguNDQwMzQ5IDguNDI4Mzk0IDguNDQwMzQ5IDguMzY4NjE4QzguNDQwMzQ5IDguMzQ0NzA3IDguNDQwMzQ5IDguMzA4ODQyIDguMzU2NjYzIDguMTg5MjlMMi43ODU1NTQgLjU3Mzg0OEg5LjMzNjk4NkMxMC45Mzg5NzkgLjU3Mzg0OCAxMi4wMjY4OTkgLjc0MTIyIDEyLjEzNDQ5NiAuNzY1MTMxQzEyLjc4MDA3NSAuODYwNzcyIDEzLjgyMDE3NCAxLjA2NDAxIDE0Ljc2NDYzMyAxLjY2MTc2OEMxNS4wNjM1MTIgMS44NTMwNTEgMTUuODc2NDYzIDIuMzkxMDM0IDE2LjI4MjkzOSAzLjM1OTQwMkgxNi41ODE4MThMMTUuMTM1MjQzIDBIMS4wMDQyMzRDLjcyOTI2NSAwIC43MTczMSAuMDExOTU1IC42ODE0NDUgLjA4MzY4NkMuNjY5NDg5IC4xMTk1NTIgLjY2OTQ4OSAuMzQ2NyAuNjY5NDg5IC40NzgyMDdMNi45OTM3NzMgOS4xMzM3NDhMLjgwMDk5NiAxNi4zOTA1MzVDLjY4MTQ0NSAxNi41MzM5OTggLjY4MTQ0NSAxNi41OTM3NzMgLjY4MTQ0NSAxNi42MDU3MjlDLjY4MTQ0NSAxNi43MzcyMzUgLjc4OTA0MSAxNi43MzcyMzUgMS4wMDQyMzQgMTYuNzM3MjM1SDE1LjEzNTI0M1onLz4KPHBhdGggaWQ9J2cwLTEyMicgZD0nTTUuNDk5Mzc3LTEuMDk5ODc1QzUuNDk5Mzc3LTEuNDIyNjY1IDUuNDk5Mzc3LTEuNDM0NjIgNS4yNDgzMTktMS40MzQ2MkM0LjAyODg5Mi0xLjQzNDYyIDEuMzM4OTc5LS44NjA3NzItLjI4NjkyNCAyLjA1NjI4OVYyLjI0NzU3MkMtLjI4NjkyNCAyLjU0NjQ1MS0uMjc0OTY5IDIuNTU4NDA2IDAgMi41NTg0MDZDLjIyNzE0OCAyLjU1ODQwNiAuMjM5MTAzIDIuNTQ2NDUxIC4yOTg4NzkgMi40NjI3NjVDMS4yNzkyMDMgLjg5NjYzOCAyLjkyOTAxNiAuMDQ3ODIxIDUuMzU1OTE1IDBDNS40OTkzNzcgMCA1LjQ5OTM3Ny0uMDgzNjg2IDUuNDk5Mzc3LS4zMzQ3NDVWLTEuMDk5ODc1WicvPgo8cGF0aCBpZD0nZzAtMTIzJyBkPSdNNS42NjY3NSAyLjA1NjI4OUM0LjA0MDg0Ny0uODcyNzI3IDEuMzUwOTM0LTEuNDM0NjIgLjEzMTUwNy0xLjQzNDYyQy0uMTE5NTUyLTEuNDM0NjItLjExOTU1Mi0xLjQyMjY2NS0uMTE5NTUyLTEuMDk5ODc1Vi0uMzM0NzQ1Qy0uMTE5NTUyLS4wNTk3NzYtLjExOTU1MiAwIC4wNDc4MjEgMEMuNzc3MDg2IC4wMTE5NTUgMS45NjA2NDggLjEwNzU5NyAzLjAzNjYxMyAuNjMzNjI0QzQuMzI3NzcxIDEuMjc5MjAzIDQuODE3OTMzIDIuMDMyMzc5IDUuMTE2ODEyIDIuNDk4NjNDNS4xNTI2NzcgMi41NTg0MDYgNS4yMjQ0MDggMi41NTg0MDYgNS4zNzk4MjYgMi41NTg0MDZDNS42NTQ3OTUgMi41NTg0MDYgNS42NjY3NSAyLjU0NjQ1MSA1LjY2Njc1IDIuMjQ3NTcyVjIuMDU2Mjg5WicvPgo8cGF0aCBpZD0nZzAtMTI0JyBkPSdNNS40OTkzNzctMS4wOTk4NzVDNS40OTkzNzctMS4zNzQ4NDQgNS40OTkzNzctMS40MzQ2MiA1LjMzMjAwNS0xLjQzNDYyQzQuNjAyNzQtMS40NDY1NzUgMy40MTkxNzgtMS41NDIyMTcgMi4zNDMyMTMtMi4wNjgyNDRDMS4wNTIwNTUtMi43MTM4MjMgLjU2MTg5My0zLjQ2Njk5OSAuMjYzMDE0LTMuOTMzMjVDLjIyNzE0OC0zLjk5MzAyNiAuMTU1NDE3LTMuOTkzMDI2IDAtMy45OTMwMjZDLS4yNzQ5NjktMy45OTMwMjYtLjI4NjkyNC0zLjk4MTA3MS0uMjg2OTI0LTMuNjgyMTkyVi0zLjQ5MDkwOUMxLjMzODk3OS0uNTYxODkzIDQuMDI4ODkyIDAgNS4yNDgzMTkgMEM1LjQ5OTM3NyAwIDUuNDk5Mzc3LS4wMTE5NTUgNS40OTkzNzctLjMzNDc0NVYtMS4wOTk4NzVaJy8+CjxwYXRoIGlkPSdnMC0xMjUnIGQ9J001LjY2Njc1LTMuNjgyMTkyQzUuNjY2NzUtMy45ODEwNzEgNS42NTQ3OTUtMy45OTMwMjYgNS4zNzk4MjYtMy45OTMwMjZDNS4xNTI2NzctMy45OTMwMjYgNS4xNDA3MjItMy45ODEwNzEgNS4wODA5NDYtMy44OTczODVDNC4xMDA2MjMtMi4zMzEyNTggMi40NTA4MDktMS40ODI0NDEgLjAyMzkxLTEuNDM0NjJDLS4xMTk1NTItMS40MzQ2Mi0uMTE5NTUyLTEuMzUwOTM0LS4xMTk1NTItMS4wOTk4NzVWLS4zMzQ3NDVDLS4xMTk1NTItLjAxMTk1NS0uMTE5NTUyIDAgLjEzMTUwNyAwQzEuMzUwOTM0IDAgNC4wNDA4NDctLjU3Mzg0OCA1LjY2Njc1LTMuNDkwOTA5Vi0zLjY4MjE5MlonLz4KPHBhdGggaWQ9J2cyLTAnIGQ9J003Ljg3ODQ1Ni0yLjc0OTY4OUM4LjA4MTY5NC0yLjc0OTY4OSA4LjI5Njg4Ny0yLjc0OTY4OSA4LjI5Njg4Ny0yLjk4ODc5MlM4LjA4MTY5NC0zLjIyNzg5NSA3Ljg3ODQ1Ni0zLjIyNzg5NUgxLjQxMDcxQzEuMjA3NDcyLTMuMjI3ODk1IC45OTIyNzktMy4yMjc4OTUgLjk5MjI3OS0yLjk4ODc5MlMxLjIwNzQ3Mi0yLjc0OTY4OSAxLjQxMDcxLTIuNzQ5Njg5SDcuODc4NDU2WicvPgo8cGF0aCBpZD0nZzItMicgZD0nTTQuNjUwNTYtMy4zMjM1MzdMMi4yNTk1MjctNS43MDI2MTVDMi4xMTYwNjUtNS44NDYwNzcgMi4wOTIxNTQtNS44Njk5ODggMS45OTY1MTMtNS44Njk5ODhDMS44NzY5NjEtNS44Njk5ODggMS43NTc0MS01Ljc2MjM5MSAxLjc1NzQxLTUuNjMwODg0QzEuNzU3NDEtNS41NDcxOTggMS43ODEzMi01LjUyMzI4OCAxLjkxMjgyNy01LjM5MTc4MUw0LjMwMzg2MS0yLjk4ODc5MkwxLjkxMjgyNy0uNTg1ODAzQzEuNzgxMzItLjQ1NDI5NiAxLjc1NzQxLS40MzAzODYgMS43NTc0MS0uMzQ2N0MxLjc1NzQxLS4yMTUxOTMgMS44NzY5NjEtLjEwNzU5NyAxLjk5NjUxMy0uMTA3NTk3QzIuMDkyMTU0LS4xMDc1OTcgMi4xMTYwNjUtLjEzMTUwNyAyLjI1OTUyNy0uMjc0OTY5TDQuNjM4NjA1LTIuNjU0MDQ3TDcuMTEzMzI1LS4xNzkzMjhDNy4xMzcyMzUtLjE2NzM3MiA3LjIyMDkyMi0uMTA3NTk3IDcuMjkyNjUzLS4xMDc1OTdDNy40MzYxMTUtLjEwNzU5NyA3LjUzMTc1Ni0uMjE1MTkzIDcuNTMxNzU2LS4zNDY3QzcuNTMxNzU2LS4zNzA2MSA3LjUzMTc1Ni0uNDE4NDMxIDcuNDk1ODktLjQ3ODIwN0M3LjQ4MzkzNS0uNTAyMTE3IDUuNTgzMDY0LTIuMzc5MDc4IDQuOTg1MzA1LTIuOTg4NzkyTDcuMTczMTAxLTUuMTc2NTg4QzcuMjMyODc3LTUuMjQ4MzE5IDcuNDEyMjA0LTUuNDAzNzM2IDcuNDcxOTgtNS40NzU0NjdDNy40ODM5MzUtNS40OTkzNzcgNy41MzE3NTYtNS41NDcxOTggNy41MzE3NTYtNS42MzA4ODRDNy41MzE3NTYtNS43NjIzOTEgNy40MzYxMTUtNS44Njk5ODggNy4yOTI2NTMtNS44Njk5ODhDNy4xOTcwMTEtNS44Njk5ODggNy4xNDkxOTEtNS44MjIxNjcgNy4wMTc2ODQtNS42OTA2Nkw0LjY1MDU2LTMuMzIzNTM3WicvPgo8cGF0aCBpZD0nZzUtOScgZD0nTTMuNjAyNDkxLTQuNzkwMDM3QzMuNjAyNDkxLTUuMDY4OTkxIDMuNjAyNDkxLTUuMTgwNTczIDQuMzUxNjgxLTUuMTgwNTczSDQuNjA2NzI1Vi01LjQ0MzU4N0M0LjI0ODA3LTUuNDE5Njc2IDMuNjUwMzExLTUuNDE5Njc2IDMuMjY3NzQ2LTUuNDE5Njc2UzIuMjc5NDUyLTUuNDE5Njc2IDEuOTIwNzk3LTUuNDQzNTg3Vi01LjE4MDU3M0gyLjE3NTg0MUMyLjkyNTAzMS01LjE4MDU3MyAyLjkyNTAzMS01LjA2ODk5MSAyLjkyNTAzMS00Ljc5MDAzN1YtMS4zMzg5NzlDMS43OTMyNzUtMS41OTQwMjIgMS43NTM0MjUtMi43ODE1NjkgMS43NTM0MjUtMy4zMjM1MzdDMS43NTM0MjUtMy45MTMzMjUgMS41MzgyMzItNC40MjM0MTIgLjk3MjM1NC00LjQyMzQxMkguNzAxMzdDLjU4MTgxOC00LjQyMzQxMiAuNDcwMjM3LTQuNDIzNDEyIC40NzAyMzctNC4zMTE4MzFDLjQ3MDIzNy00LjIxNjE4OSAuNTY1ODc4LTQuMjAwMjQ5IC41ODk3ODgtNC4yMDAyNDlDMS4wNjc5OTUtNC4xNDQ0NTggMS4wNzU5NjUtMy40MTkxNzggMS4wNzU5NjUtMy4zNTU0MTdDMS4wNzU5NjUtMi44ODUxODEgMS4wOTE5MDUtMS4zMDcwOTggMi45MjUwMzEtMS4wOTE5MDVWLS42NTM1NDlDMi45MjUwMzEtLjM3NDU5NSAyLjkyNTAzMS0uMjYzMDE0IDIuMTc1ODQxLS4yNjMwMTRIMS45MjA3OTdWMEMyLjI3OTQ1Mi0uMDIzOTEgMi44NzcyMS0uMDIzOTEgMy4yNTk3NzYtLjAyMzkxUzQuMjQ4MDctLjAyMzkxIDQuNjA2NzI1IDBWLS4yNjMwMTRINC4zNTE2ODFDMy42MDI0OTEtLjI2MzAxNCAzLjYwMjQ5MS0uMzc0NTk1IDMuNjAyNDkxLS42NTM1NDlWLTEuMDkxOTA1QzUuMjQ0MzM0LTEuMjU5Mjc4IDUuNDkxNDA3LTIuNTc0MzQ2IDUuNDk5Mzc3LTMuMTQwMjI0QzUuNDk5Mzc3LTMuNDY2OTk5IDUuNTA3MzQ3LTQuMTM2NDg4IDUuOTYxNjQ0LTQuMjAwMjQ5QzYuMDI1NDA1LTQuMjA4MjE5IDYuMTA1MTA2LTQuMjE2MTg5IDYuMTA1MTA2LTQuMzExODMxQzYuMTA1MTA2LTQuNDIzNDEyIDYuMDAxNDk0LTQuNDIzNDEyIDUuODgxOTQzLTQuNDIzNDEySDUuNjAyOTg5QzUuMDIxMTcxLTQuNDIzNDEyIDQuODI5ODg4LTMuOTM3MjM1IDQuODIxOTE4LTMuMTgwMDc1QzQuODEzOTQ4LTIuNDM4ODU0IDQuNTY2ODc0LTEuNTMwMjYyIDMuNjAyNDkxLTEuMzMxMDA5Vi00Ljc5MDAzN1onLz4KPHBhdGggaWQ9J2c1LTQwJyBkPSdNMi42NTQwNDcgMS45OTI1MjhDMi43MTc4MDggMS45OTI1MjggMi44MTM0NSAxLjk5MjUyOCAyLjgxMzQ1IDEuODk2ODg3QzIuODEzNDUgMS44NjUwMDYgMi44MDU0NzkgMS44NTcwMzYgMi43MDE4NjggMS43NTM0MjVDMS42MDk5NjMgLjcyNTI4IDEuMzM4OTc5LS43NTcxNjEgMS4zMzg5NzktMS45OTI1MjhDMS4zMzg5NzktNC4yODc5MiAyLjI4NzQyMi01LjM2Mzg4NSAyLjY5Mzg5OC01LjczMDUxMUMyLjgwNTQ3OS01LjgzNDEyMiAyLjgxMzQ1LTUuODQyMDkyIDIuODEzNDUtNS44ODE5NDNTMi43ODE1NjktNS45Nzc1ODQgMi43MDE4NjgtNS45Nzc1ODRDMi41NzQzNDYtNS45Nzc1ODQgMi4xNzU4NDEtNS41NzExMDggMi4xMTIwOC01LjQ5OTM3N0MxLjA0NDA4NS00LjM4MzU2MiAuODIwOTIyLTIuOTQ4OTQxIC44MjA5MjItMS45OTI1MjhDLjgyMDkyMi0uMjA3MjIzIDEuNTcwMTEyIDEuMjI3Mzk3IDIuNjU0MDQ3IDEuOTkyNTI4WicvPgo8cGF0aCBpZD0nZzUtNDEnIGQ9J00yLjQ2Mjc2NS0xLjk5MjUyOEMyLjQ2Mjc2NS0yLjc0OTY4OSAyLjMzNTI0My0zLjY1ODI4MSAxLjg0MTA5Ni00LjU5ODc1NUMxLjQ1MDU2LTUuMzMyMDA1IC43MjUyOC01Ljk3NzU4NCAuNTgxODE4LTUuOTc3NTg0Qy41MDIxMTctNS45Nzc1ODQgLjQ3ODIwNy01LjkyMTc5MyAuNDc4MjA3LTUuODgxOTQzQy40NzgyMDctNS44NTAwNjIgLjQ3ODIwNy01LjgzNDEyMiAuNTczODQ4LTUuNzM4NDgxQzEuNjg5NjY0LTQuNjc4NDU2IDEuOTQ0NzA3LTMuMjE5OTI1IDEuOTQ0NzA3LTEuOTkyNTI4QzEuOTQ0NzA3IC4yOTQ4OTQgLjk5NjI2NCAxLjM3ODgyOSAuNTg5Nzg4IDEuNzQ1NDU1Qy40ODYxNzcgMS44NDkwNjYgLjQ3ODIwNyAxLjg1NzAzNiAuNDc4MjA3IDEuODk2ODg3Uy41MDIxMTcgMS45OTI1MjggLjU4MTgxOCAxLjk5MjUyOEMuNzA5MzQgMS45OTI1MjggMS4xMDc4NDYgMS41ODYwNTIgMS4xNzE2MDYgMS41MTQzMjFDMi4yMzk2MDEgLjM5ODUwNiAyLjQ2Mjc2NS0xLjAzNjExNSAyLjQ2Mjc2NS0xLjk5MjUyOFonLz4KPHBhdGggaWQ9J2c1LTQ4JyBkPSdNMy44OTczODUtMi41NDI0NjZDMy44OTczODUtMy4zOTUyNjggMy44MDk3MTQtMy45MTMzMjUgMy41NDY3LTQuNDIzNDEyQzMuMTk2MDE1LTUuMTI0NzgyIDIuNTUwNDM2LTUuMzAwMTI1IDIuMTEyMDgtNS4zMDAxMjVDMS4xMDc4NDYtNS4zMDAxMjUgLjc0MTIyLTQuNTUwOTM0IC42Mjk2MzktNC4zMjc3NzFDLjM0MjcxNS0zLjc0NTk1MyAuMzI2Nzc1LTIuOTU2OTEyIC4zMjY3NzUtMi41NDI0NjZDLjMyNjc3NS0yLjAxNjQzOCAuMzUwNjg1LTEuMjExNDU3IC43MzMyNS0uNTczODQ4QzEuMDk5ODc1IC4wMTU5NCAxLjY4OTY2NCAuMTY3MzcyIDIuMTEyMDggLjE2NzM3MkMyLjQ5NDY0NSAuMTY3MzcyIDMuMTgwMDc1IC4wNDc4MjEgMy41Nzg1OC0uNzQxMjJDMy44NzM0NzQtMS4zMTUwNjggMy44OTczODUtMi4wMjQ0MDggMy44OTczODUtMi41NDI0NjZaTTIuMTEyMDgtLjA1NTc5MUMxLjg0MTA5Ni0uMDU1NzkxIDEuMjkxMTU4LS4xODMzMTMgMS4xMjM3ODYtMS4wMjAxNzRDMS4wMzYxMTUtMS40NzQ0NzEgMS4wMzYxMTUtMi4yMjM2NjEgMS4wMzYxMTUtMi42MzgxMDdDMS4wMzYxMTUtMy4xODgwNDUgMS4wMzYxMTUtMy43NDU5NTMgMS4xMjM3ODYtNC4xODQzMDlDMS4yOTExNTgtNC45OTcyNiAxLjkxMjgyNy01LjA3Njk2MSAyLjExMjA4LTUuMDc2OTYxQzIuMzgzMDY0LTUuMDc2OTYxIDIuOTMzMDAxLTQuOTQxNDY5IDMuMDkyNDAzLTQuMjE2MTg5QzMuMTg4MDQ1LTMuNzc3ODMzIDMuMTg4MDQ1LTMuMTgwMDc1IDMuMTg4MDQ1LTIuNjM4MTA3QzMuMTg4MDQ1LTIuMTY3ODcgMy4xODgwNDUtMS40NTA1NiAzLjA5MjQwMy0xLjAwNDIzNEMyLjkyNTAzMS0uMTY3MzcyIDIuMzc1MDkzLS4wNTU3OTEgMi4xMTIwOC0uMDU1NzkxWicvPgo8cGF0aCBpZD0nZzUtNDknIGQ9J00yLjUwMjYxNS01LjA3Njk2MUMyLjUwMjYxNS01LjI5MjE1NCAyLjQ4NjY3NS01LjMwMDEyNSAyLjI3MTQ4Mi01LjMwMDEyNUMxLjk0NDcwNy00Ljk4MTMyIDEuNTIyMjkxLTQuNzkwMDM3IC43NjUxMzEtNC43OTAwMzdWLTQuNTI3MDI0Qy45ODAzMjQtNC41MjcwMjQgMS40MTA3MS00LjUyNzAyNCAxLjg3Mjk3Ni00Ljc0MjIxN1YtLjY1MzU0OUMxLjg3Mjk3Ni0uMzU4NjU1IDEuODQ5MDY2LS4yNjMwMTQgMS4wOTE5MDUtLjI2MzAxNEguODEyOTUxVjBDMS4xMzk3MjYtLjAyMzkxIDEuODI1MTU2LS4wMjM5MSAyLjE4MzgxMS0uMDIzOTFTMy4yMzU4NjYtLjAyMzkxIDMuNTYyNjQgMFYtLjI2MzAxNEgzLjI4MzY4NkMyLjUyNjUyNi0uMjYzMDE0IDIuNTAyNjE1LS4zNTg2NTUgMi41MDI2MTUtLjY1MzU0OVYtNS4wNzY5NjFaJy8+CjxwYXRoIGlkPSdnNS01MCcgZD0nTTIuMjQ3NTcyLTEuNjI1OTAzQzIuMzc1MDkzLTEuNzQ1NDU1IDIuNzA5ODM4LTIuMDA4NDY4IDIuODM3MzYtMi4xMjAwNUMzLjMzMTUwNy0yLjU3NDM0NiAzLjgwMTc0My0zLjAxMjcwMiAzLjgwMTc0My0zLjczNzk4M0MzLjgwMTc0My00LjY4NjQyNiAzLjAwNDczMi01LjMwMDEyNSAyLjAwODQ2OC01LjMwMDEyNUMxLjA1MjA1NS01LjMwMDEyNSAuNDIyNDE2LTQuNTc0ODQ0IC40MjI0MTYtMy44NjU1MDRDLjQyMjQxNi0zLjQ3NDk2OSAuNzMzMjUtMy40MTkxNzggLjg0NDgzMi0zLjQxOTE3OEMxLjAxMjIwNC0zLjQxOTE3OCAxLjI1OTI3OC0zLjUzODczIDEuMjU5Mjc4LTMuODQxNTk0QzEuMjU5Mjc4LTQuMjU2MDQgLjg2MDc3Mi00LjI1NjA0IC43NjUxMzEtNC4yNTYwNEMuOTk2MjY0LTQuODM3ODU4IDEuNTMwMjYyLTUuMDM3MTExIDEuOTIwNzk3LTUuMDM3MTExQzIuNjYyMDE3LTUuMDM3MTExIDMuMDQ0NTgzLTQuNDA3NDcyIDMuMDQ0NTgzLTMuNzM3OTgzQzMuMDQ0NTgzLTIuOTA5MDkxIDIuNDYyNzY1LTIuMzAzMzYyIDEuNTIyMjkxLTEuMzM4OTc5TC41MTgwNTctLjMwMjg2NEMuNDIyNDE2LS4yMTUxOTMgLjQyMjQxNi0uMTk5MjUzIC40MjI0MTYgMEgzLjU3MDYxTDMuODAxNzQzLTEuNDI2NjVIMy41NTQ2N0MzLjUzMDc2LTEuMjY3MjQ4IDMuNDY2OTk5LS44Njg3NDIgMy4zNzEzNTctLjcxNzMxQzMuMzIzNTM3LS42NTM1NDkgMi43MTc4MDgtLjY1MzU0OSAyLjU5MDI4Ni0uNjUzNTQ5SDEuMTcxNjA2TDIuMjQ3NTcyLTEuNjI1OTAzWicvPgo8cGF0aCBpZD0nZzUtNjEnIGQ9J001LjgyNjE1Mi0yLjY1NDA0N0M1Ljk0NTcwNC0yLjY1NDA0NyA2LjEwNTEwNi0yLjY1NDA0NyA2LjEwNTEwNi0yLjgzNzM2UzUuOTEzODIzLTMuMDIwNjcyIDUuNzk0MjcxLTMuMDIwNjcySC43ODEwNzFDLjY2MTUxOS0zLjAyMDY3MiAuNDcwMjM3LTMuMDIwNjcyIC40NzAyMzctMi44MzczNlMuNjI5NjM5LTIuNjU0MDQ3IC43NDkxOTEtMi42NTQwNDdINS44MjYxNTJaTTUuNzk0MjcxLS45NjQzODRDNS45MTM4MjMtLjk2NDM4NCA2LjEwNTEwNi0uOTY0Mzg0IDYuMTA1MTA2LTEuMTQ3Njk2UzUuOTQ1NzA0LTEuMzMxMDA5IDUuODI2MTUyLTEuMzMxMDA5SC43NDkxOTFDLjYyOTYzOS0xLjMzMTAwOSAuNDcwMjM3LTEuMzMxMDA5IC40NzAyMzctMS4xNDc2OTZTLjY2MTUxOS0uOTY0Mzg0IC43ODEwNzEtLjk2NDM4NEg1Ljc5NDI3MVonLz4KPHBhdGggaWQ9J2czLTEyJyBkPSdNNC43ODIwNjctNC41MzQ5OTRDNC43ODIwNjctNS4yNjAyNzQgNC4xOTIyNzktNS42MTg5MjkgMy41MzA3Ni01LjYxODkyOUMyLjUwMjYxNS01LjYxODkyOSAxLjczNzQ4NC00LjQ1NTI5MyAxLjUxNDMyMS0zLjU3ODU4TC4yNTUwNDQgMS40NTA1NkMuMjM5MTAzIDEuNTA2MzUxIC4zMDI4NjQgMS41NDYyMDIgLjM1MDY4NSAxLjU0NjIwMkMuNDE0NDQ2IDEuNTQ2MjAyIC40NzgyMDcgMS41NDYyMDIgLjQ5NDE0NyAxLjQ5MDQxMUwxLjAzNjExNS0uNjQ1NTc5QzEuMjE5NDI3LS4yMTUxOTMgMS41OTQwMjIgLjA3MTczMSAyLjE2Nzg3IC4wNzE3MzFDMy4yNjc3NDYgLjA3MTczMSA0LjQ3MTIzMy0uNzA5MzQgNC40NzEyMzMtMS45NzY1ODhDNC40NzEyMzMtMi41MDI2MTUgNC4yNzE5OC0yLjg1MzMgMy44NzM0NzQtMy4xODAwNzVDMy45MjEyOTUtMy4xODgwNDUgNC4wNjQ3NTctMy4yOTE2NTYgNC4xMDQ2MDgtMy4zMjM1MzdDNC41MDMxMTMtMy41OTQ1MjEgNC43ODIwNjctNC4wNDg4MTcgNC43ODIwNjctNC41MzQ5OTRaTTMuMjExOTU1LTMuMTgwMDc1QzMuMDY4NDkzLTMuMTU2MTY0IDIuOTI1MDMxLTMuMTQwMjI0IDIuNzczNTk5LTMuMTQwMjI0QzIuNjg1OTI4LTMuMTQwMjI0IDIuNTk4MjU3LTMuMTQwMjI0IDIuNTEwNTg1LTMuMTcyMTA1QzIuNjYyMDE3LTMuMjExOTU1IDIuODIxNDItMy4yMTE5NTUgMi45NzI4NTItMy4yMTE5NTVDMy4wNTI1NTMtMy4yMTE5NTUgMy4xMzIyNTQtMy4yMDM5ODUgMy4yMTE5NTUtMy4xODAwNzVaTTQuMjc5OTUtNC42ODY0MjZDNC4yNzk5NS00LjI4NzkyIDQuMTA0NjA4LTMuODE3Njg0IDMuODI1NjU0LTMuNTM4NzNDMy43ODU4MDMtMy40OTg4NzkgMy42MTg0MzEtMy4zNDc0NDcgMy41NzA2MS0zLjMzOTQ3N0MzLjM0NzQ0Ny0zLjM3OTMyOCAzLjE3MjEwNS0zLjQzNTExOCAyLjk0MDk3MS0zLjQzNTExOEMyLjczMzc0OC0zLjQzNTExOCAyLjIzMTYzMS0zLjQ1MTA1OSAyLjIzMTYzMS0zLjE0MDIyNEMyLjIzMTYzMS0yLjkwMTEyMSAyLjY4NTkyOC0yLjkxNzA2MSAyLjg0NTMzLTIuOTE3MDYxQzMuMDkyNDAzLTIuOTE3MDYxIDMuMzIzNTM3LTIuOTQwOTcxIDMuNTU0NjctMy4wMjg2NDNDMy43OTM3NzMtMi44MzczNiAzLjkxMzMyNS0yLjU4MjMxNiAzLjkxMzMyNS0yLjE4MzgxMUMzLjkxMzMyNS0xLjcxMzU3NCAzLjc1MzkyMy0xLjE4NzU0NyAzLjUyMjc5LS44Njg3NDJDMy4yMjc4OTUtLjQ0NjMyNiAyLjczMzc0OC0uMTUxNDMyIDIuMTM1OTktLjE1MTQzMkMxLjYwOTk2My0uMTUxNDMyIDEuMTk1NTE3LS41NTc5MDggMS4xOTU1MTctMS4xMTU4MTZDMS4xOTU1MTctMS4yMTk0MjcgMS4yMDM0ODctMS4zMjMwMzkgMS4yMjczOTctMS40MDI3NEwxLjc1MzQyNS0zLjUyMjc5QzEuOTI4NzY3LTQuMjI0MTU5IDIuNjA2MjI3LTUuMzk1NzY2IDMuNDk4ODc5LTUuMzk1NzY2QzMuOTA1MzU1LTUuMzk1NzY2IDQuMjc5OTUtNS4xOTY1MTMgNC4yNzk5NS00LjY4NjQyNlonLz4KPHBhdGggaWQ9J2czLTIxJyBkPSdNMi45OTY3NjItMi4yODc0MjJDMy4yOTE2NTYtMS41NjIxNDIgMy43Nzc4MzMtLjI2MzAxNCAzLjg2NTUwNC0uMTE5NTUyQzQuMDAwOTk2IC4wNzk3MDEgNC4xNjAzOTkgLjA3OTcwMSA0LjM1MTY4MSAuMDc5NzAxQzQuNTgyODE0IC4wNzk3MDEgNC42NDY1NzUgLjA3OTcwMSA0LjY0NjU3NS0uMDE1OTRDNC42NDY1NzUtLjA1NTc5MSA0LjYzMDYzNS0uMDc5NzAxIDQuNTk4NzU1LS4xMDM2MTFDNC41MDMxMTMtLjIxNTE5MyA0LjQ2MzI2My0uMjk0ODk0IDQuNDA3NDcyLS40NDYzMjZMMi42MTQxOTctNC45OTcyNkMyLjU1ODQwNi01LjE0ODY5MiAyLjQwNjk3NC01LjUzMTI1OCAxLjU4NjA1Mi01LjUzMTI1OEMxLjUwNjM1MS01LjUzMTI1OCAxLjM4NjgtNS41MzEyNTggMS4zODY4LTUuNDE5Njc2QzEuMzg2OC01LjMyNDAzNSAxLjQ2NjUwMS01LjMxNjA2NSAxLjUwNjM1MS01LjMwODA5NUMxLjY2NTc1My01LjI4NDE4NCAxLjgxNzE4Ni01LjI2ODI0NCAyLjAwMDQ5OC00LjgwNTk3OEwyLjU3NDM0Ni0zLjM3MTM1N0wyLjg4NTE4MS0yLjU2NjM3NkwuNjA1NzI5LS40NTQyOTZDLjUxODA1Ny0uMzc0NTk1IC40MzgzNTYtLjI3ODk1NCAuNDM4MzU2LS4xNjczNzJDLjQzODM1Ni0uMDA3OTcgLjU3Mzg0OCAuMDk1NjQxIC43MDkzNCAuMDk1NjQxQy44MjA5MjIgLjA5NTY0MSAuOTMyNTAzIC4wMDc5NyAxLjAwNDIzNC0uMDcxNzMxTDIuOTk2NzYyLTIuMjg3NDIyWicvPgo8cGF0aCBpZD0nZzMtMjcnIGQ9J000LjM3NTU5Mi0yLjkwOTA5MUM0LjUxOTA1NC0yLjkwOTA5MSA0LjU3NDg0NC0yLjkwOTA5MSA0LjY3MDQ4Ni0yLjk3Mjg1MkM0Ljc1ODE1Ny0zLjA0NDU4MyA0Ljc5MDAzNy0zLjE1NjE2NCA0Ljc5MDAzNy0zLjIxMTk1NUM0Ljc5MDAzNy0zLjQzNTExOCA0LjU5MDc4NS0zLjQzNTExOCA0LjQ1NTI5My0zLjQzNTExOEgyLjQ5NDY0NUMxLjI2NzI0OC0zLjQzNTExOCAuMzI2Nzc1LTIuMTc1ODQxIC4zMjY3NzUtMS4yMTE0NTdDLjMyNjc3NS0uNDMwMzg2IC44ODQ2ODIgLjA3OTcwMSAxLjYyNTkwMyAuMDc5NzAxQzIuNjMwMTM3IC4wNzk3MDEgMy43MjIwNDItLjg4NDY4MiAzLjcyMjA0Mi0yLjA3MjIyOUMzLjcyMjA0Mi0yLjUwMjYxNSAzLjU3MDYxLTIuNzU3NjU5IDMuNDgyOTM5LTIuOTA5MDkxSDQuMzc1NTkyWk0xLjYzMzg3My0uMTQzNDYyQzEuMjM1MzY3LS4xNDM0NjIgLjg4NDY4Mi0uNDA2NDc2IC44ODQ2ODItLjk4ODI5NEMuODg0NjgyLTEuMzIzMDM5IDEuMDgzOTM1LTIuOTA5MDkxIDIuMzY3MTIzLTIuOTA5MDkxQzMuMTQwMjI0LTIuOTA5MDkxIDMuMTQwMjI0LTIuMzE5MzAzIDMuMTQwMjI0LTIuMTUxOTNDMy4xNDAyMjQtMS4zMzEwMDkgMi41NzQzNDYtLjE0MzQ2MiAxLjYzMzg3My0uMTQzNDYyWicvPgo8cGF0aCBpZD0nZzMtNTknIGQ9J00xLjQ5MDQxMS0uMTE5NTUyQzEuNDkwNDExIC4zOTg1MDYgMS4zNzg4MjkgLjg1MjgwMiAuODg0NjgyIDEuMzQ2OTQ5Qy44NTI4MDIgMS4zNzA4NTkgLjgzNjg2MiAxLjM4NjggLjgzNjg2MiAxLjQyNjY1Qy44MzY4NjIgMS40OTA0MTEgLjkwMDYyMyAxLjUzODIzMiAuOTU2NDEzIDEuNTM4MjMyQzEuMDUyMDU1IDEuNTM4MjMyIDEuNzEzNTc0IC45MDg1OTMgMS43MTM1NzQtLjAyMzkxQzEuNzEzNTc0LS41MzM5OTggMS41MjIyOTEtLjg4NDY4MiAxLjE3MTYwNi0uODg0NjgyQy44OTI2NTMtLjg4NDY4MiAuNzMzMjUtLjY2MTUxOSAuNzMzMjUtLjQ0NjMyNkMuNzMzMjUtLjIyMzE2MyAuODg0NjgyIDAgMS4xNzk1NzcgMEMxLjM3MDg1OSAwIDEuNDkwNDExLS4xMTE1ODIgMS40OTA0MTEtLjExOTU1MlonLz4KPHBhdGggaWQ9J2czLTYxJyBkPSdNMy43MDYxMDItNS42NDI4MzlDMy43NTM5MjMtNS43NTQ0MjEgMy43NTM5MjMtNS43NzAzNjEgMy43NTM5MjMtNS43OTQyNzFDMy43NTM5MjMtNS44OTc4ODMgMy42NzQyMjItNS45Nzc1ODQgMy41NzA2MS01Ljk3NzU4NEMzLjQ0MzA4OC01Ljk3NzU4NCAzLjQxMTIwOC01Ljg4MTk0MyAzLjM3OTMyOC01LjgwMjI0MkwuNTE4MDU3IDEuNjU3NzgzQy40NzAyMzcgMS43NjkzNjUgLjQ3MDIzNyAxLjc4NTMwNSAuNDcwMjM3IDEuODA5MjE1Qy40NzAyMzcgMS45MTI4MjcgLjU0OTkzOCAxLjk5MjUyOCAuNjUzNTQ5IDEuOTkyNTI4Qy43ODEwNzEgMS45OTI1MjggLjgxMjk1MSAxLjg5Njg4NyAuODQ0ODMyIDEuODE3MTg2TDMuNzA2MTAyLTUuNjQyODM5WicvPgo8cGF0aCBpZD0nZzMtNzgnIGQ9J002LjMxMjMyOS00LjU3NDg0NEM2LjQwNzk3LTQuOTY1MzggNi41ODMzMTMtNS4xNTY2NjMgNy4xNTcxNjEtNS4xODA1NzNDNy4yMzY4NjItNS4xODA1NzMgNy4zMDA2MjMtNS4yMjgzOTQgNy4zMDA2MjMtNS4zMzIwMDVDNy4zMDA2MjMtNS4zNzk4MjYgNy4yNjA3NzItNS40NDM1ODcgNy4xODEwNzEtNS40NDM1ODdDNy4xMjUyOC01LjQ0MzU4NyA2Ljk3Mzg0OC01LjQxOTY3NiA2LjM4NDA2LTUuNDE5Njc2QzUuNzQ2NDUxLTUuNDE5Njc2IDUuNjQyODM5LTUuNDQzNTg3IDUuNTcxMTA4LTUuNDQzNTg3QzUuNDQzNTg3LTUuNDQzNTg3IDUuNDE5Njc2LTUuMzU1OTE1IDUuNDE5Njc2LTUuMjkyMTU0QzUuNDE5Njc2LTUuMTg4NTQzIDUuNTIzMjg4LTUuMTgwNTczIDUuNTk1MDE5LTUuMTgwNTczQzYuMDgxMTk2LTUuMTY0NjMzIDYuMDgxMTk2LTQuOTQ5NDQgNi4wODExOTYtNC44Mzc4NThDNi4wODExOTYtNC43OTgwMDcgNi4wODExOTYtNC43NTgxNTcgNi4wNDkzMTUtNC42MzA2MzVMNS4xNzI2MDMtMS4xMzk3MjZMMy4yNTE4MDYtNS4zMDAxMjVDMy4xODgwNDUtNS40NDM1ODcgMy4xNzIxMDUtNS40NDM1ODcgMi45ODA4MjItNS40NDM1ODdIMS45NDQ3MDdDMS44MDEyNDUtNS40NDM1ODcgMS42OTc2MzQtNS40NDM1ODcgMS42OTc2MzQtNS4yOTIxNTRDMS42OTc2MzQtNS4xODA1NzMgMS43OTMyNzUtNS4xODA1NzMgMS45NjA2NDgtNS4xODA1NzNDMi4wMjQ0MDgtNS4xODA1NzMgMi4yNjM1MTItNS4xODA1NzMgMi40NDY4MjQtNS4xMzI3NTJMMS4zNzg4MjktLjg1MjgwMkMxLjI4MzE4OC0uNDU0Mjk2IDEuMDc1OTY1LS4yNzg5NTQgLjU0MTk2OC0uMjYzMDE0Qy40OTQxNDctLjI2MzAxNCAuMzk4NTA2LS4yNTUwNDQgLjM5ODUwNi0uMTExNTgyQy4zOTg1MDYtLjA2Mzc2MSAuNDM4MzU2IDAgLjUxODA1NyAwQy41NDk5MzggMCAuNzMzMjUtLjAyMzkxIDEuMzA3MDk4LS4wMjM5MUMxLjkzNjczNy0uMDIzOTEgMi4wNTYyODkgMCAyLjEyODAyIDBDMi4xNTk5IDAgMi4yNzk0NTIgMCAyLjI3OTQ1Mi0uMTUxNDMyQzIuMjc5NDUyLS4yNDcwNzMgMi4xOTE3ODEtLjI2MzAxNCAyLjEzNTk5LS4yNjMwMTRDMS44NDkwNjYtLjI3MDk4NCAxLjYwOTk2My0uMzE4ODA0IDEuNjA5OTYzLS41OTc3NThDMS42MDk5NjMtLjYzNzYwOSAxLjYzMzg3My0uNzQ5MTkxIDEuNjMzODczLS43NTcxNjFMMi42Nzc5NTgtNC45MTc1NTlIMi42ODU5MjhMNC45MDE2MTktLjE0MzQ2MkM0Ljk1NzQxLS4wMTU5NCA0Ljk2NTM4IDAgNS4wNTMwNTEgMEM1LjE2NDYzMyAwIDUuMTcyNjAzLS4wMzE4OCA1LjIwNDQ4My0uMTY3MzcyTDYuMzEyMzI5LTQuNTc0ODQ0WicvPgo8cGF0aCBpZD0nZzMtMTA3JyBkPSdNMi4zMjcyNzMtNS4yOTIxNTRDMi4zMzUyNDMtNS4zMDgwOTUgMi4zNTkxNTMtNS40MTE3MDYgMi4zNTkxNTMtNS40MTk2NzZDMi4zNTkxNTMtNS40NTk1MjcgMi4zMjcyNzMtNS41MzEyNTggMi4yMzE2MzEtNS41MzEyNThDMi4xOTk3NTEtNS41MzEyNTggMS45NTI2NzctNS41MDczNDcgMS43NjkzNjUtNS40OTE0MDdMMS4zMjMwMzktNS40NTk1MjdDMS4xNDc2OTYtNS40NDM1ODcgMS4wNjc5OTUtNS40MzU2MTYgMS4wNjc5OTUtNS4yOTIxNTRDMS4wNjc5OTUtNS4xODA1NzMgMS4xNzk1NzctNS4xODA1NzMgMS4yNzUyMTgtNS4xODA1NzNDMS42NTc3ODMtNS4xODA1NzMgMS42NTc3ODMtNS4xMzI3NTIgMS42NTc3ODMtNS4wNjEwMjFDMS42NTc3ODMtNS4wMzcxMTEgMS42NTc3ODMtNS4wMjExNzEgMS42MTc5MzMtNC44Nzc3MDlMLjQ4NjE3Ny0uMzQyNzE1Qy40NTQyOTYtLjIyMzE2MyAuNDU0Mjk2LS4xNzUzNDIgLjQ1NDI5Ni0uMTY3MzcyQy40NTQyOTYtLjAzMTg4IC41NjU4NzggLjA3OTcwMSAuNzE3MzEgLjA3OTcwMUMuOTg4Mjk0IC4wNzk3MDEgMS4wNTIwNTUtLjE3NTM0MiAxLjA4MzkzNS0uMjg2OTI0QzEuMTYzNjM2LS42MjE2NjkgMS4zNzA4NTktMS40NjY1MDEgMS40NTg1MzEtMS44MDEyNDVDMS44OTY4ODctMS43NTM0MjUgMi40MzA4ODQtMS42MDE5OTMgMi40MzA4ODQtMS4xNDc2OTZDMi40MzA4ODQtMS4xMDc4NDYgMi40MzA4ODQtMS4wNjc5OTUgMi40MTQ5NDQtLjk4ODI5NEMyLjM5MTAzNC0uODg0NjgyIDIuMzc1MDkzLS43NzMxMDEgMi4zNzUwOTMtLjczMzI1QzIuMzc1MDkzLS4yNjMwMTQgMi43MjU3NzggLjA3OTcwMSAzLjE4ODA0NSAuMDc5NzAxQzMuNTIyNzkgLjA3OTcwMSAzLjczMDAxMi0uMTY3MzcyIDMuODMzNjI0LS4zMTg4MDRDNC4wMjQ5MDctLjYxMzY5OSA0LjE1MjQyOC0xLjA5MTkwNSA0LjE1MjQyOC0xLjEzOTcyNkM0LjE1MjQyOC0xLjIxOTQyNyA0LjA4ODY2Ny0xLjI0MzMzNyA0LjAzMjg3Ny0xLjI0MzMzN0MzLjkzNzIzNS0xLjI0MzMzNyAzLjkyMTI5NS0xLjE5NTUxNyAzLjg4OTQxNS0xLjA1MjA1NUMzLjc4NTgwMy0uNjc3NDYgMy41Nzg1OC0uMTQzNDYyIDMuMjAzOTg1LS4xNDM0NjJDMi45OTY3NjItLjE0MzQ2MiAyLjk0ODk0MS0uMzE4ODA0IDIuOTQ4OTQxLS41MzM5OThDMi45NDg5NDEtLjYzNzYwOSAyLjk1NjkxMi0uNzMzMjUgMi45OTY3NjItLjkxNjU2M0MzLjAwNDczMi0uOTQ4NDQzIDMuMDM2NjEzLTEuMDc1OTY1IDMuMDM2NjEzLTEuMTYzNjM2QzMuMDM2NjEzLTEuODE3MTg2IDIuMjE1NjkxLTEuOTYwNjQ4IDEuODA5MjE1LTIuMDE2NDM4QzIuMTA0MTEtMi4xOTE3ODEgMi4zNzUwOTMtMi40NjI3NjUgMi40NzA3MzUtMi41NjYzNzZDMi45MDkwOTEtMi45OTY3NjIgMy4yNjc3NDYtMy4yOTE2NTYgMy42NTAzMTEtMy4yOTE2NTZDMy43NTM5MjMtMy4yOTE2NTYgMy44NDk1NjQtMy4yNjc3NDYgMy45MTMzMjUtMy4xODgwNDVDMy40ODI5MzktMy4xMzIyNTQgMy40ODI5MzktMi43NTc2NTkgMy40ODI5MzktMi43NDk2ODlDMy40ODI5MzktMi41NzQzNDYgMy42MTg0MzEtMi40NTQ3OTUgMy43OTM3NzMtMi40NTQ3OTVDNC4wMDg5NjYtMi40NTQ3OTUgNC4yNDgwNy0yLjYzMDEzNyA0LjI0ODA3LTIuOTU2OTEyQzQuMjQ4MDctMy4yMjc4OTUgNC4wNTY3ODctMy41MTQ4MTkgMy42NTgyODEtMy41MTQ4MTlDMy4xOTYwMTUtMy41MTQ4MTkgMi43ODE1NjktMy4xNjQxMzQgMi4zMjcyNzMtMi43MDk4MzhDMS44NjUwMDYtMi4yNTU1NDIgMS42NjU3NTMtMi4xNjc4NyAxLjUzODIzMi0yLjExMjA4TDIuMzI3MjczLTUuMjkyMTU0WicvPgo8cGF0aCBpZD0nZzYtNDAnIGQ9J00zLjg4NTQzIDIuOTA1MTA2QzMuODg1NDMgMi44NjkyNCAzLjg4NTQzIDIuODQ1MzMgMy42ODIxOTIgMi42NDIwOTJDMi40ODY2NzUgMS40MzQ2MiAxLjgxNzE4Ni0uNTM3OTgzIDEuODE3MTg2LTIuOTc2ODM3QzEuODE3MTg2LTUuMjk2MTM5IDIuMzc5MDc4LTcuMjkyNjUzIDMuNzY1ODc4LTguNzAzMzYyQzMuODg1NDMtOC44MTA5NTkgMy44ODU0My04LjgzNDg2OSAzLjg4NTQzLTguODcwNzM1QzMuODg1NDMtOC45NDI0NjYgMy44MjU2NTQtOC45NjYzNzYgMy43Nzc4MzMtOC45NjYzNzZDMy42MjI0MTYtOC45NjYzNzYgMi42NDIwOTItOC4xMDU2MDQgMi4wNTYyODktNi45MzM5OThDMS40NDY1NzUtNS43MjY1MjYgMS4xNzE2MDYtNC40NDczMjMgMS4xNzE2MDYtMi45NzY4MzdDMS4xNzE2MDYtMS45MTI4MjcgMS4zMzg5NzktLjQ5MDE2MiAxLjk2MDY0OCAuNzg5MDQxQzIuNjY2MDAyIDIuMjIzNjYxIDMuNjQ2MzI2IDMuMDAwNzQ3IDMuNzc3ODMzIDMuMDAwNzQ3QzMuODI1NjU0IDMuMDAwNzQ3IDMuODg1NDMgMi45NzY4MzcgMy44ODU0MyAyLjkwNTEwNlonLz4KPHBhdGggaWQ9J2c2LTQxJyBkPSdNMy4zNzEzNTctMi45NzY4MzdDMy4zNzEzNTctMy44ODU0MyAzLjI1MTgwNi01LjM2Nzg3IDIuNTgyMzE2LTYuNzU0NjdDMS44NzY5NjEtOC4xODkyOSAuODk2NjM4LTguOTY2Mzc2IC43NjUxMzEtOC45NjYzNzZDLjcxNzMxLTguOTY2Mzc2IC42NTc1MzQtOC45NDI0NjYgLjY1NzUzNC04Ljg3MDczNUMuNjU3NTM0LTguODM0ODY5IC42NTc1MzQtOC44MTA5NTkgLjg2MDc3Mi04LjYwNzcyMUMyLjA1NjI4OS03LjQwMDI0OSAyLjcyNTc3OC01LjQyNzY0NiAyLjcyNTc3OC0yLjk4ODc5MkMyLjcyNTc3OC0uNjY5NDg5IDIuMTYzODg1IDEuMzI3MDI0IC43NzcwODYgMi43Mzc3MzNDLjY1NzUzNCAyLjg0NTMzIC42NTc1MzQgMi44NjkyNCAuNjU3NTM0IDIuOTA1MTA2Qy42NTc1MzQgMi45NzY4MzcgLjcxNzMxIDMuMDAwNzQ3IC43NjUxMzEgMy4wMDA3NDdDLjkyMDU0OCAzLjAwMDc0NyAxLjkwMDg3MiAyLjEzOTk3NSAyLjQ4NjY3NSAuOTY4MzY5QzMuMDk2Mzg5LS4yNTEwNTkgMy4zNzEzNTctMS41NDIyMTcgMy4zNzEzNTctMi45NzY4MzdaJy8+CjxwYXRoIGlkPSdnNi00OScgZD0nTTMuNDQzMDg4LTcuNjYzMjYzQzMuNDQzMDg4LTcuOTM4MjMyIDMuNDQzMDg4LTcuOTUwMTg3IDMuMjAzOTg1LTcuOTUwMTg3QzIuOTE3MDYxLTcuNjI3Mzk3IDIuMzE5MzAzLTcuMTg1MDU2IDEuMDg3OTItNy4xODUwNTZWLTYuODM4MzU2QzEuMzYyODg5LTYuODM4MzU2IDEuOTYwNjQ4LTYuODM4MzU2IDIuNjE4MTgyLTcuMTQ5MTkxVi0uOTIwNTQ4QzIuNjE4MTgyLS40OTAxNjIgMi41ODIzMTYtLjM0NjcgMS41MzAyNjItLjM0NjdIMS4xNTk2NTFWMEMxLjQ4MjQ0MS0uMDIzOTEgMi42NDIwOTItLjAyMzkxIDMuMDM2NjEzLS4wMjM5MVM0LjU3ODgyOS0uMDIzOTEgNC45MDE2MTkgMFYtLjM0NjdINC41MzEwMDlDMy40Nzg5NTQtLjM0NjcgMy40NDMwODgtLjQ5MDE2MiAzLjQ0MzA4OC0uOTIwNTQ4Vi03LjY2MzI2M1onLz4KPHBhdGggaWQ9J2c2LTUwJyBkPSdNNS4yNjAyNzQtMi4wMDg0NjhINC45OTcyNkM0Ljk2MTM5NS0xLjgwNTIzIDQuODY1NzUzLTEuMTQ3Njk2IDQuNzQ2MjAyLS45NTY0MTNDNC42NjI1MTYtLjg0ODgxNyAzLjk4MTA3MS0uODQ4ODE3IDMuNjIyNDE2LS44NDg4MTdIMS40MTA3MUMxLjczMzQ5OS0xLjEyMzc4NiAyLjQ2Mjc2NS0xLjg4ODkxNyAyLjc3MzU5OS0yLjE3NTg0MUM0LjU5MDc4NS0zLjg0OTU2NCA1LjI2MDI3NC00LjQ3MTIzMyA1LjI2MDI3NC01LjY1NDc5NUM1LjI2MDI3NC03LjAyOTYzOSA0LjE3MjM1NC03Ljk1MDE4NyAyLjc4NTU1NC03Ljk1MDE4N1MuNTg1ODAzLTYuNzY2NjI1IC41ODU4MDMtNS43Mzg0ODFDLjU4NTgwMy01LjEyODc2NyAxLjExMTgzMS01LjEyODc2NyAxLjE0NzY5Ni01LjEyODc2N0MxLjM5ODc1NS01LjEyODc2NyAxLjcwOTU4OS01LjMwODA5NSAxLjcwOTU4OS01LjY5MDY2QzEuNzA5NTg5LTYuMDI1NDA1IDEuNDgyNDQxLTYuMjUyNTUzIDEuMTQ3Njk2LTYuMjUyNTUzQzEuMDQwMS02LjI1MjU1MyAxLjAxNjE4OS02LjI1MjU1MyAuOTgwMzI0LTYuMjQwNTk4QzEuMjA3NDcyLTcuMDUzNTQ5IDEuODUzMDUxLTcuNjAzNDg3IDIuNjMwMTM3LTcuNjAzNDg3QzMuNjQ2MzI2LTcuNjAzNDg3IDQuMjY3OTk1LTYuNzU0NjcgNC4yNjc5OTUtNS42NTQ3OTVDNC4yNjc5OTUtNC42Mzg2MDUgMy42ODIxOTItMy43NTM5MjMgMy4wMDA3NDctMi45ODg3OTJMLjU4NTgwMy0uMjg2OTI0VjBINC45NDk0NEw1LjI2MDI3NC0yLjAwODQ2OFonLz4KPHBhdGggaWQ9J2c2LTYxJyBkPSdNOC4wNjk3MzgtMy44NzM0NzRDOC4yMzcxMTEtMy44NzM0NzQgOC40NTIzMDQtMy44NzM0NzQgOC40NTIzMDQtNC4wODg2NjdDOC40NTIzMDQtNC4zMTU4MTYgOC4yNDkwNjYtNC4zMTU4MTYgOC4wNjk3MzgtNC4zMTU4MTZIMS4wMjgxNDRDLjg2MDc3Mi00LjMxNTgxNiAuNjQ1NTc5LTQuMzE1ODE2IC42NDU1NzktNC4xMDA2MjNDLjY0NTU3OS0zLjg3MzQ3NCAuODQ4ODE3LTMuODczNDc0IDEuMDI4MTQ0LTMuODczNDc0SDguMDY5NzM4Wk04LjA2OTczOC0xLjY0OTgxM0M4LjIzNzExMS0xLjY0OTgxMyA4LjQ1MjMwNC0xLjY0OTgxMyA4LjQ1MjMwNC0xLjg2NTAwNkM4LjQ1MjMwNC0yLjA5MjE1NCA4LjI0OTA2Ni0yLjA5MjE1NCA4LjA2OTczOC0yLjA5MjE1NEgxLjAyODE0NEMuODYwNzcyLTIuMDkyMTU0IC42NDU1NzktMi4wOTIxNTQgLjY0NTU3OS0xLjg3Njk2MUMuNjQ1NTc5LTEuNjQ5ODEzIC44NDg4MTctMS42NDk4MTMgMS4wMjgxNDQtMS42NDk4MTNIOC4wNjk3MzhaJy8+CjxwYXRoIGlkPSdnNi0xMDEnIGQ9J000LjU3ODgyOS0yLjc3MzU5OUM0Ljg0MTg0My0yLjc3MzU5OSA0Ljg2NTc1My0yLjc3MzU5OSA0Ljg2NTc1My0zLjAwMDc0N0M0Ljg2NTc1My00LjIwODIxOSA0LjIyMDE3NC01LjMzMjAwNSAyLjc3MzU5OS01LjMzMjAwNUMxLjQxMDcxLTUuMzMyMDA1IC4zNTg2NTUtNC4xMDA2MjMgLjM1ODY1NS0yLjYxODE4MkMuMzU4NjU1LTEuMDQwMSAxLjU3ODA4MiAuMTE5NTUyIDIuOTA1MTA2IC4xMTk1NTJDNC4zMjc3NzEgLjExOTU1MiA0Ljg2NTc1My0xLjE3MTYwNiA0Ljg2NTc1My0xLjQyMjY2NUM0Ljg2NTc1My0xLjQ5NDM5NiA0LjgwNTk3OC0xLjU0MjIxNyA0LjczNDI0Ny0xLjU0MjIxN0M0LjYzODYwNS0xLjU0MjIxNyA0LjYxNDY5NS0xLjQ4MjQ0MSA0LjU5MDc4NS0xLjQyMjY2NUM0LjI3OTk1LS40MTg0MzEgMy40Nzg5NTQtLjE0MzQ2MiAyLjk3NjgzNy0uMTQzNDYyUzEuMjY3MjQ4LS40NzgyMDcgMS4yNjcyNDgtMi41NDY0NTFWLTIuNzczNTk5SDQuNTc4ODI5Wk0xLjI3OTIwMy0zLjAwMDc0N0MxLjM3NDg0NC00Ljg3NzcwOSAyLjQyNjg5OS01LjA5MjkwMiAyLjc2MTY0NC01LjA5MjkwMkM0LjA0MDg0Ny01LjA5MjkwMiA0LjExMjU3OC0zLjQwNzIyMyA0LjEyNDUzMy0zLjAwMDc0N0gxLjI3OTIwM1onLz4KPHBhdGggaWQ9J2c2LTExMicgZD0nTTIuOTI5MDE2IDEuOTcyNjAzQzIuMTYzODg1IDEuOTcyNjAzIDIuMDIwNDIzIDEuOTcyNjAzIDIuMDIwNDIzIDEuNDM0NjJWLS42NDU1NzlDMi4yMzU2MTYtLjM0NjcgMi43MjU3NzggLjExOTU1MiAzLjQ5MDkwOSAuMTE5NTUyQzQuODY1NzUzIC4xMTk1NTIgNi4wNzMyMjUtMS4wNDAxIDYuMDczMjI1LTIuNTgyMzE2QzYuMDczMjI1LTQuMTAwNjIzIDQuOTQ5NDQtNS4yNzIyMjkgMy42NDYzMjYtNS4yNzIyMjlDMi41OTQyNzEtNS4yNzIyMjkgMi4wMzIzNzktNC41MTkwNTQgMS45OTY1MTMtNC40NzEyMzNWLTUuMjcyMjI5TC4zMzQ3NDUtNS4xNDA3MjJWLTQuNzk0MDIyQzEuMTcxNjA2LTQuNzk0MDIyIDEuMjQzMzM3LTQuNzEwMzM2IDEuMjQzMzM3LTQuMTg0MzA5VjEuNDM0NjJDMS4yNDMzMzcgMS45NzI2MDMgMS4xMTE4MzEgMS45NzI2MDMgLjMzNDc0NSAxLjk3MjYwM1YyLjMxOTMwM0MuNjQ1NTc5IDIuMjk1MzkyIDEuMjkxMTU4IDIuMjk1MzkyIDEuNjI1OTAzIDIuMjk1MzkyQzEuOTcyNjAzIDIuMjk1MzkyIDIuNjE4MTgyIDIuMjk1MzkyIDIuOTI5MDE2IDIuMzE5MzAzVjEuOTcyNjAzWk0yLjAyMDQyMy0zLjgxMzY5OUMyLjAyMDQyMy00LjA0MDg0NyAyLjAyMDQyMy00LjA1MjgwMiAyLjE1MTkzLTQuMjQ0MDg1QzIuNTEwNTg1LTQuNzgyMDY3IDMuMDk2Mzg5LTUuMDA5MjE1IDMuNTUwNjg1LTUuMDA5MjE1QzQuNDQ3MzIzLTUuMDA5MjE1IDUuMTY0NjMzLTMuOTIxMjk1IDUuMTY0NjMzLTIuNTgyMzE2QzUuMTY0NjMzLTEuMTU5NjUxIDQuMzUxNjgxLS4xMTk1NTIgMy40MzExMzMtLjExOTU1MkMzLjA2MDUyMy0uMTE5NTUyIDIuNzEzODIzLS4yNzQ5NjkgMi40NzQ3Mi0uNTAyMTE3QzIuMTk5NzUxLS43NzcwODYgMi4wMjA0MjMtMS4wMTYxODkgMi4wMjA0MjMtMS4zNTA5MzRWLTMuODEzNjk5WicvPgo8cGF0aCBpZD0nZzYtMTIwJyBkPSdNMy4zNDc0NDctMi44MjE0MkMzLjY5NDE0Ny0zLjI3NTcxNiA0LjE5NjI2NC0zLjkyMTI5NSA0LjQyMzQxMi00LjE3MjM1NEM0LjkxMzU3NC00LjcyMjI5MSA1LjQ3NTQ2Ny00LjgwNTk3OCA1Ljg1ODAzMi00LjgwNTk3OFYtNS4xNTI2NzdDNS4zNDM5Ni01LjEyODc2NyA1LjMyMDA1LTUuMTI4NzY3IDQuODUzNzk4LTUuMTI4NzY3QzQuMzk5NTAyLTUuMTI4NzY3IDQuMzc1NTkyLTUuMTI4NzY3IDMuNzc3ODMzLTUuMTUyNjc3Vi00LjgwNTk3OEMzLjkzMzI1LTQuNzgyMDY3IDQuMTI0NTMzLTQuNzEwMzM2IDQuMTI0NTMzLTQuNDM1MzY3QzQuMTI0NTMzLTQuMjMyMTMgNC4wMTY5MzYtNC4xMDA2MjMgMy45NDUyMDUtNC4wMDQ5ODFMMy4xODAwNzUtMy4wMzY2MTNMMi4yNDc1NzItNC4yNjc5OTVDMi4yMTE3MDYtNC4zMTU4MTYgMi4xMzk5NzUtNC40MjM0MTIgMi4xMzk5NzUtNC41MDcwOThDMi4xMzk5NzUtNC41Nzg4MjkgMi4xOTk3NTEtNC43OTQwMjIgMi41NTg0MDYtNC44MDU5NzhWLTUuMTUyNjc3QzIuMjU5NTI3LTUuMTI4NzY3IDEuNjQ5ODEzLTUuMTI4NzY3IDEuMzI3MDI0LTUuMTI4NzY3Qy45MzI1MDMtNS4xMjg3NjcgLjkwODU5My01LjEyODc2NyAuMTc5MzI4LTUuMTUyNjc3Vi00LjgwNTk3OEMuNzg5MDQxLTQuODA1OTc4IDEuMDE2MTg5LTQuNzgyMDY3IDEuMjY3MjQ4LTQuNDU5Mjc4TDIuNjY2MDAyLTIuNjMwMTM3QzIuNjg5OTEzLTIuNjA2MjI3IDIuNzM3NzMzLTIuNTM0NDk2IDIuNzM3NzMzLTIuNDk4NjNTMS44MDUyMy0xLjI5MTE1OCAxLjY4NTY3OS0xLjEzNTc0MUMxLjE1OTY1MS0uNDkwMTYyIC42MzM2MjQtLjM1ODY1NSAuMTE5NTUyLS4zNDY3VjBDLjU3Mzg0OC0uMDIzOTEgLjU5Nzc1OC0uMDIzOTEgMS4xMTE4MzEtLjAyMzkxQzEuNTY2MTI3LS4wMjM5MSAxLjU5MDAzNy0uMDIzOTEgMi4xODc3OTYgMFYtLjM0NjdDMS45MDA4NzItLjM4MjU2NSAxLjg1MzA1MS0uNTYxODkzIDEuODUzMDUxLS43MjkyNjVDMS44NTMwNTEtLjkyMDU0OCAxLjkzNjczNy0xLjAxNjE4OSAyLjA1NjI4OS0xLjE3MTYwNkMyLjIzNTYxNi0xLjQyMjY2NSAyLjYzMDEzNy0xLjkxMjgyNyAyLjkxNzA2MS0yLjI4MzQzN0wzLjg5NzM4NS0xLjAwNDIzNEM0LjEwMDYyMy0uNzQxMjIgNC4xMDA2MjMtLjcxNzMxIDQuMTAwNjIzLS42NDU1NzlDNC4xMDA2MjMtLjU0OTkzOCA0LjAwNDk4MS0uMzU4NjU1IDMuNjgyMTkyLS4zNDY3VjBDMy45OTMwMjYtLjAyMzkxIDQuNTc4ODI5LS4wMjM5MSA0LjkxMzU3NC0uMDIzOTFDNS4zMDgwOTUtLjAyMzkxIDUuMzMyMDA1LS4wMjM5MSA2LjA0OTMxNSAwVi0uMzQ2N0M1LjQxNTY5MS0uMzQ2NyA1LjIwMDQ5OC0uMzcwNjEgNC45MTM1NzQtLjc1MzE3NkwzLjM0NzQ0Ny0yLjgyMTQyWicvPgo8cGF0aCBpZD0nZzQtMTInIGQ9J002Ljc2NjYyNS02Ljk1NzkwOEM2Ljc2NjYyNS03LjY3NTIxOCA2LjE1NjkxMi04LjQyODM5NCA1LjA2ODk5MS04LjQyODM5NEMzLjUyNjc3NS04LjQyODM5NCAyLjU0NjQ1MS02LjUzOTQ3NyAyLjIzNTYxNi01LjI5NjEzOUwuMzQ2NyAyLjE5OTc1MUMuMzIyNzkgMi4yOTUzOTIgLjM5NDUyMSAyLjMxOTMwMyAuNDU0Mjk2IDIuMzE5MzAzQy41Mzc5ODMgMi4zMTkzMDMgLjU5Nzc1OCAyLjMwNzM0NyAuNjA5NzE0IDIuMjQ3NTcyTDEuNDQ2NTc1LTEuMDk5ODc1QzEuNTY2MTI3LS40MzAzODYgMi4yMjM2NjEgLjExOTU1MiAyLjkyOTAxNiAuMTE5NTUyQzQuNjM4NjA1IC4xMTk1NTIgNi4yNTI1NTMtMS4yMTk0MjcgNi4yNTI1NTMtMy4wMDA3NDdDNi4yNTI1NTMtMy40NTUwNDQgNi4xNDQ5NTYtMy45MDkzNCA1Ljg5Mzg5OC00LjI5MTkwNUM1Ljc1MDQzNi00LjUxOTA1NCA1LjU3MTEwOC00LjY4NjQyNiA1LjM3OTgyNi00LjgyOTg4OEM2LjI0MDU5OC01LjI4NDE4NCA2Ljc2NjYyNS02LjAxMzQ1IDYuNzY2NjI1LTYuOTU3OTA4Wk00LjY4NjQyNi00Ljg0MTg0M0M0LjQ5NTE0My00Ljc3MDExMiA0LjMwMzg2MS00Ljc0NjIwMiA0LjA3NjcxMi00Ljc0NjIwMkMzLjkwOTM0LTQuNzQ2MjAyIDMuNzUzOTIzLTQuNzM0MjQ3IDMuNTM4NzMtNC44MDU5NzhDMy42NTgyODEtNC44ODk2NjQgMy44Mzc2MDktNC45MTM1NzQgNC4wODg2NjctNC45MTM1NzRDNC4zMDM4NjEtNC45MTM1NzQgNC41MTkwNTQtNC44ODk2NjQgNC42ODY0MjYtNC44NDE4NDNaTTYuMTQ0OTU2LTcuMDY1NTA0QzYuMTQ0OTU2LTYuNDA3OTcgNS44MjIxNjctNS40NTE1NTcgNS4wNDUwODEtNS4wMDkyMTVDNC44MTc5MzMtNS4wOTI5MDIgNC41MDcwOTgtNS4xNTI2NzcgNC4yNDQwODUtNS4xNTI2NzdDMy45OTMwMjYtNS4xNTI2NzcgMy4yNzU3MTYtNS4xNzY1ODggMy4yNzU3MTYtNC43OTQwMjJDMy4yNzU3MTYtNC40NzEyMzMgMy45MzMyNS00LjUwNzA5OCA0LjEzNjQ4OC00LjUwNzA5OEM0LjQ0NzMyMy00LjUwNzA5OCA0LjcyMjI5MS00LjU3ODgyOSA1LjAwOTIxNS00LjY2MjUxNkM1LjM5MTc4MS00LjM1MTY4MSA1LjU1OTE1My0zLjk0NTIwNSA1LjU1OTE1My0zLjM0NzQ0N0M1LjU1OTE1My0yLjY1NDA0NyA1LjM2Nzg3LTIuMDkyMTU0IDUuMTQwNzIyLTEuNTc4MDgyQzQuNzQ2MjAyLS42OTM0IDMuODEzNjk5LS4xMTk1NTIgMi45ODg3OTItLjExOTU1MkMyLjExNjA2NS0uMTE5NTUyIDEuNjYxNzY4LS44MTI5NTEgMS42NjE3NjgtMS42MjU5MDNDMS42NjE3NjgtMS43MzM0OTkgMS42NjE3NjgtMS44ODg5MTcgMS43MDk1ODktMi4wNjgyNDRMMi40ODY2NzUtNS4yMTI0NTNDMi44ODExOTYtNi43Nzg1OCAzLjg4NTQzLTguMTg5MjkgNS4wNDUwODEtOC4xODkyOUM1LjkwNTg1My04LjE4OTI5IDYuMTQ0OTU2LTcuNTkxNTMyIDYuMTQ0OTU2LTcuMDY1NTA0WicvPgo8cGF0aCBpZD0nZzQtMjEnIGQ9J00zLjY5NDE0Ny03LjQ0ODA3QzMuMzk1MjY4LTguMjk2ODg3IDIuNDUwODA5LTguMjk2ODg3IDIuMjk1MzkyLTguMjk2ODg3QzIuMjIzNjYxLTguMjk2ODg3IDIuMDkyMTU0LTguMjk2ODg3IDIuMDkyMTU0LTguMTc3MzM1QzIuMDkyMTU0LTguMDgxNjk0IDIuMTYzODg1LTguMDY5NzM4IDIuMjIzNjYxLTguMDU3NzgzQzIuNDAyOTg5LTguMDMzODczIDIuNTQ2NDUxLTguMDA5OTYzIDIuNzM3NzMzLTcuNjYzMjYzQzIuODU3Mjg1LTcuNDM2MTE1IDQuMDg4NjY3LTMuODYxNTE5IDQuMDg4NjY3LTMuODM3NjA5QzQuMDg4NjY3LTMuODI1NjU0IDQuMDc2NzEyLTMuODEzNjk5IDMuOTgxMDcxLTMuNzE4MDU3TC44NzI3MjctLjU3Mzg0OEMuNzI5MjY1LS40MzAzODYgLjYzMzYyNC0uMzM0NzQ1IC42MzM2MjQtLjE3OTMyOEMuNjMzNjI0LS4wMTE5NTUgLjc3NzA4NiAuMTMxNTA3IC45NjgzNjkgLjEzMTUwN0MxLjAxNjE4OSAuMTMxNTA3IDEuMTQ3Njk2IC4xMDc1OTcgMS4yMTk0MjcgLjAzNTg2NkMxLjQxMDcxLS4xNDM0NjIgMy4xMjAyOTktMi4yMzU2MTYgNC4yMDgyMTktMy41MjY3NzVDNC41MTkwNTQtMi41OTQyNzEgNC45MDE2MTktMS40OTQzOTYgNS4yNzIyMjktLjQ5MDE2MkM1LjMzMjAwNS0uMzEwODM0IDUuMzkxNzgxLS4xNDM0NjIgNS41NTkxNTMgLjAxMTk1NUM1LjY3ODcwNSAuMTE5NTUyIDUuNzAyNjE1IC4xMTk1NTIgNi4wMzczNiAuMTE5NTUySDYuMjY0NTA4QzYuMzEyMzI5IC4xMTk1NTIgNi4zOTYwMTUgLjExOTU1MiA2LjM5NjAxNSAuMDIzOTFDNi4zOTYwMTUtLjAyMzkxIDYuMzg0MDYtLjAzNTg2NiA2LjMzNjIzOS0uMDgzNjg2QzYuMjI4NjQzLS4yMTUxOTMgNi4xNDQ5NTYtLjQzMDM4NiA2LjA5NzEzNi0uNTczODQ4TDMuNjk0MTQ3LTcuNDQ4MDdaJy8+CjxwYXRoIGlkPSdnNC0yNScgZD0nTTMuMDk2Mzg5LTQuNTA3MDk4SDQuNDQ3MzIzQzQuMTI0NTMzLTMuMTY4MTIgMy45MjEyOTUtMi4yOTUzOTIgMy45MjEyOTUtMS4zMzg5NzlDMy45MjEyOTUtMS4xNzE2MDYgMy45MjEyOTUgLjExOTU1MiA0LjQxMTQ1NyAuMTE5NTUyQzQuNjYyNTE2IC4xMTk1NTIgNC44Nzc3MDktLjEwNzU5NyA0Ljg3NzcwOS0uMzEwODM0QzQuODc3NzA5LS4zNzA2MSA0Ljg3NzcwOS0uMzk0NTIxIDQuNzk0MDIyLS41NzM4NDhDNC40NzEyMzMtMS4zOTg3NTUgNC40NzEyMzMtMi40MjY4OTkgNC40NzEyMzMtMi41MTA1ODVDNC40NzEyMzMtMi41ODIzMTYgNC40NzEyMzMtMy40MzExMzMgNC43MjIyOTEtNC41MDcwOThINi4wNjEyN0M2LjIxNjY4Ny00LjUwNzA5OCA2LjYxMTIwOC00LjUwNzA5OCA2LjYxMTIwOC00Ljg4OTY2NEM2LjYxMTIwOC01LjE1MjY3NyA2LjM4NDA2LTUuMTUyNjc3IDYuMTY4ODY3LTUuMTUyNjc3SDIuMjM1NjE2QzEuOTYwNjQ4LTUuMTUyNjc3IDEuNTU0MTcyLTUuMTUyNjc3IDEuMDA0MjM0LTQuNTY2ODc0Qy42OTM0LTQuMjIwMTc0IC4zMTA4MzQtMy41ODY1NSAuMzEwODM0LTMuNTE0ODE5Uy4zNzA2MS0zLjQxOTE3OCAuNDQyMzQxLTMuNDE5MTc4Qy41MjYwMjctMy40MTkxNzggLjUzNzk4My0zLjQ1NTA0NCAuNTk3NzU4LTMuNTI2Nzc1QzEuMjE5NDI3LTQuNTA3MDk4IDEuODQxMDk2LTQuNTA3MDk4IDIuMTM5OTc1LTQuNTA3MDk4SDIuODIxNDJDMi41NTg0MDYtMy42MTA0NjEgMi4yNTk1MjctMi41NzAzNjEgMS4yNzkyMDMtLjQ3ODIwN0MxLjE4MzU2Mi0uMjg2OTI0IDEuMTgzNTYyLS4yNjMwMTQgMS4xODM1NjItLjE5MTI4M0MxLjE4MzU2MiAuMDU5Nzc2IDEuMzk4NzU1IC4xMTk1NTIgMS41MDYzNTEgLjExOTU1MkMxLjg1MzA1MSAuMTE5NTUyIDEuOTQ4NjkyLS4xOTEyODMgMi4wOTIxNTQtLjY5MzRDMi4yODM0MzctMS4zMDMxMTMgMi4yODM0MzctMS4zMjcwMjQgMi40MDI5ODktMS44MDUyM0wzLjA5NjM4OS00LjUwNzA5OFonLz4KPHBhdGggaWQ9J2c0LTI3JyBkPSdNNi4wNzMyMjUtNC41MDcwOThDNi4yMjg2NDMtNC41MDcwOTggNi42MjMxNjMtNC41MDcwOTggNi42MjMxNjMtNC44ODk2NjRDNi42MjMxNjMtNS4xNTI2NzcgNi4zOTYwMTUtNS4xNTI2NzcgNi4xODA4MjItNS4xNTI2NzdIMy41Mzg3M0MxLjc0NTQ1NS01LjE1MjY3NyAuNDU0Mjk2LTMuMTU2MTY0IC40NTQyOTYtMS43NDU0NTVDLjQ1NDI5Ni0uNzI5MjY1IDEuMTExODMxIC4xMTk1NTIgMi4xODc3OTYgLjExOTU1MkMzLjU5ODUwNiAuMTE5NTUyIDUuMTQwNzIyLTEuMzk4NzU1IDUuMTQwNzIyLTMuMTkyMDNDNS4xNDA3MjItMy42NTgyODEgNS4wMzMxMjYtNC4xMTI1NzggNC43NDYyMDItNC41MDcwOThINi4wNzMyMjVaTTIuMTk5NzUxLS4xMTk1NTJDMS41OTAwMzctLjExOTU1MiAxLjE0NzY5Ni0uNTg1ODAzIDEuMTQ3Njk2LTEuNDEwNzFDMS4xNDc2OTYtMi4xMjgwMiAxLjU3ODA4Mi00LjUwNzA5OCAzLjMzNTQ5Mi00LjUwNzA5OEMzLjg0OTU2NC00LjUwNzA5OCA0LjQyMzQxMi00LjI1NjA0IDQuNDIzNDEyLTMuMzM1NDkyQzQuNDIzNDEyLTIuOTE3MDYxIDQuMjMyMTMtMS45MTI4MjcgMy44MTM2OTktMS4yMTk0MjdDMy4zODMzMTMtLjUxNDA3MiAyLjczNzczMy0uMTE5NTUyIDIuMTk5NzUxLS4xMTk1NTJaJy8+CjxwYXRoIGlkPSdnNC01OScgZD0nTTIuMzMxMjU4IC4wNDc4MjFDMi4zMzEyNTgtLjY0NTU3OSAyLjEwNDExLTEuMTU5NjUxIDEuNjEzOTQ4LTEuMTU5NjUxQzEuMjMxMzgyLTEuMTU5NjUxIDEuMDQwMS0uODQ4ODE3IDEuMDQwMS0uNTg1ODAzUzEuMjE5NDI3IDAgMS42MjU5MDMgMEMxLjc4MTMyIDAgMS45MTI4MjctLjA0NzgyMSAyLjAyMDQyMy0uMTU1NDE3QzIuMDQ0MzM0LS4xNzkzMjggMi4wNTYyODktLjE3OTMyOCAyLjA2ODI0NC0uMTc5MzI4QzIuMDkyMTU0LS4xNzkzMjggMi4wOTIxNTQtLjAxMTk1NSAyLjA5MjE1NCAuMDQ3ODIxQzIuMDkyMTU0IC40NDIzNDEgMi4wMjA0MjMgMS4yMTk0MjcgMS4zMjcwMjQgMS45OTY1MTNDMS4xOTU1MTcgMi4xMzk5NzUgMS4xOTU1MTcgMi4xNjM4ODUgMS4xOTU1MTcgMi4xODc3OTZDMS4xOTU1MTcgMi4yNDc1NzIgMS4yNTUyOTMgMi4zMDczNDcgMS4zMTUwNjggMi4zMDczNDdDMS40MTA3MSAyLjMwNzM0NyAyLjMzMTI1OCAxLjQyMjY2NSAyLjMzMTI1OCAuMDQ3ODIxWicvPgo8cGF0aCBpZD0nZzQtNzYnIGQ9J000LjM4NzU0Ny03LjI0NDgzMkM0LjQ5NTE0My03LjY5OTEyOCA0LjUzMTAwOS03LjgxODY4IDUuNTgzMDY0LTcuODE4NjhDNS45MDU4NTMtNy44MTg2OCA1Ljk4OTUzOS03LjgxODY4IDUuOTg5NTM5LTguMDQ1ODI4QzUuOTg5NTM5LTguMTY1MzggNS44NTgwMzItOC4xNjUzOCA1LjgxMDIxMi04LjE2NTM4QzUuNTcxMTA4LTguMTY1MzggNS4yOTYxMzktOC4xNDE0NjkgNS4wNTcwMzYtOC4xNDE0NjlIMy40NTUwNDRDMy4yMjc4OTUtOC4xNDE0NjkgMi45NjQ4ODItOC4xNjUzOCAyLjczNzczMy04LjE2NTM4QzIuNjQyMDkyLTguMTY1MzggMi41MTA1ODUtOC4xNjUzOCAyLjUxMDU4NS03LjkzODIzMkMyLjUxMDU4NS03LjgxODY4IDIuNjE4MTgyLTcuODE4NjggMi43OTc1MDktNy44MTg2OEMzLjUyNjc3NS03LjgxODY4IDMuNTI2Nzc1LTcuNzIzMDM5IDMuNTI2Nzc1LTcuNTkxNTMyQzMuNTI2Nzc1LTcuNTY3NjIxIDMuNTI2Nzc1LTcuNDk1ODkgMy40Nzg5NTQtNy4zMTY1NjNMMS44NjUwMDYtLjg4NDY4MkMxLjc1NzQxLS40NjYyNTIgMS43MzM0OTktLjM0NjcgLjg5NjYzOC0uMzQ2N0MuNjY5NDg5LS4zNDY3IC41NDk5MzgtLjM0NjcgLjU0OTkzOC0uMTMxNTA3Qy41NDk5MzggMCAuNjIxNjY5IDAgLjg2MDc3MiAwSDYuMjE2Njg3QzYuNDc5NzAxIDAgNi40OTE2NTYtLjAxMTk1NSA2LjU3NTM0Mi0uMjI3MTQ4TDcuNDk1ODktMi43NzM1OTlDNy41MTk4MDEtMi44MzMzNzUgNy41NDM3MTEtMi45MDUxMDYgNy41NDM3MTEtMi45NDA5NzFDNy41NDM3MTEtMy4wMTI3MDIgNy40ODM5MzUtMy4wNjA1MjMgNy40MjQxNTktMy4wNjA1MjNDNy40MTIyMDQtMy4wNjA1MjMgNy4zNTI0MjgtMy4wNjA1MjMgNy4zMjg1MTgtMy4wMTI3MDJDNy4zMDQ2MDgtMy4wMDA3NDcgNy4zMDQ2MDgtMi45NzY4MzcgNy4yMDg5NjYtMi43NDk2ODlDNi44MjY0MDEtMS42OTc2MzQgNi4yODg0MTgtLjM0NjcgNC4yNjc5OTUtLjM0NjdIMy4xMjAyOTlDMi45NTI5MjctLjM0NjcgMi45MjkwMTYtLjM0NjcgMi44NTcyODUtLjM1ODY1NUMyLjcyNTc3OC0uMzcwNjEgMi43MTM4MjMtLjM5NDUyMSAyLjcxMzgyMy0uNDkwMTYyQzIuNzEzODIzLS41NzM4NDggMi43Mzc3MzMtLjY0NTU3OSAyLjc2MTY0NC0uNzUzMTc2TDQuMzg3NTQ3LTcuMjQ0ODMyWicvPgo8cGF0aCBpZD0nZzQtMTA0JyBkPSdNMy4zNTk0MDItNy45OTgwMDdDMy4zNzEzNTctOC4wNDU4MjggMy4zOTUyNjgtOC4xMTc1NTkgMy4zOTUyNjgtOC4xNzczMzVDMy4zOTUyNjgtOC4yOTY4ODcgMy4yNzU3MTYtOC4yOTY4ODcgMy4yNTE4MDYtOC4yOTY4ODdDMy4yMzk4NTEtOC4yOTY4ODcgMi42NTQwNDctOC4yNDkwNjYgMi41OTQyNzEtOC4yMzcxMTFDMi4zOTEwMzQtOC4yMjUxNTYgMi4yMTE3MDYtOC4yMDEyNDUgMS45OTY1MTMtOC4xODkyOUMxLjY5NzYzNC04LjE2NTM4IDEuNjEzOTQ4LTguMTUzNDI1IDEuNjEzOTQ4LTcuOTM4MjMyQzEuNjEzOTQ4LTcuODE4NjggMS43MDk1ODktNy44MTg2OCAxLjg3Njk2MS03LjgxODY4QzIuNDYyNzY1LTcuODE4NjggMi40NzQ3Mi03LjcxMTA4MyAyLjQ3NDcyLTcuNTkxNTMyQzIuNDc0NzItNy41MTk4MDEgMi40NTA4MDktNy40MjQxNTkgMi40Mzg4NTQtNy4zODgyOTRMLjcwNTM1NS0uNDY2MjUyQy42NTc1MzQtLjI4NjkyNCAuNjU3NTM0LS4yNjMwMTQgLjY1NzUzNC0uMTkxMjgzQy42NTc1MzQgLjA3MTczMSAuODYwNzcyIC4xMTk1NTIgLjk4MDMyNCAuMTE5NTUyQzEuMTgzNTYyIC4xMTk1NTIgMS4zMzg5NzktLjAzNTg2NiAxLjM5ODc1NS0uMTY3MzcyTDEuOTM2NzM3LTIuMzMxMjU4QzEuOTk2NTEzLTIuNTk0MjcxIDIuMDY4MjQ0LTIuODQ1MzMgMi4xMjgwMi0zLjEwODM0NEMyLjI1OTUyNy0zLjYxMDQ2MSAyLjI1OTUyNy0zLjYyMjQxNiAyLjQ4NjY3NS0zLjk2OTExNlMzLjI1MTgwNi01LjAzMzEyNiA0LjE3MjM1NC01LjAzMzEyNkM0LjY1MDU2LTUuMDMzMTI2IDQuODE3OTMzLTQuNjc0NDcxIDQuODE3OTMzLTQuMTk2MjY0QzQuODE3OTMzLTMuNTI2Nzc1IDQuMzUxNjgxLTIuMjIzNjYxIDQuMDg4NjY3LTEuNTA2MzUxQzMuOTgxMDcxLTEuMjE5NDI3IDMuOTIxMjk1LTEuMDY0MDEgMy45MjEyOTUtLjg0ODgxN0MzLjkyMTI5NS0uMzEwODM0IDQuMjkxOTA1IC4xMTk1NTIgNC44NjU3NTMgLjExOTU1MkM1Ljk3NzU4NCAuMTE5NTUyIDYuMzk2MDE1LTEuNjM3ODU4IDYuMzk2MDE1LTEuNzA5NTg5QzYuMzk2MDE1LTEuNzY5MzY1IDYuMzQ4MTk0LTEuODE3MTg2IDYuMjc2NDYzLTEuODE3MTg2QzYuMTY4ODY3LTEuODE3MTg2IDYuMTU2OTEyLTEuNzgxMzIgNi4wOTcxMzYtMS41NzgwODJDNS44MjIxNjctLjYyMTY2OSA1LjM3OTgyNi0uMTE5NTUyIDQuOTAxNjE5LS4xMTk1NTJDNC43ODIwNjctLjExOTU1MiA0LjU5MDc4NS0uMTMxNTA3IDQuNTkwNzg1LS41MTQwNzJDNC41OTA3ODUtLjgyNDkwNyA0LjczNDI0Ny0xLjIwNzQ3MiA0Ljc4MjA2Ny0xLjMzODk3OUM0Ljk5NzI2LTEuOTEyODI3IDUuNTM1MjQzLTMuMzIzNTM3IDUuNTM1MjQzLTQuMDE2OTM2QzUuNTM1MjQzLTQuNzM0MjQ3IDUuMTE2ODEyLTUuMjcyMjI5IDQuMjA4MjE5LTUuMjcyMjI5QzMuNTI2Nzc1LTUuMjcyMjI5IDIuOTI5MDE2LTQuOTQ5NDQgMi40Mzg4NTQtNC4zMjc3NzFMMy4zNTk0MDItNy45OTgwMDdaJy8+CjxwYXRoIGlkPSdnNC0xMjAnIGQ9J001LjY2Njc1LTQuODc3NzA5QzUuMjg0MTg0LTQuODA1OTc4IDUuMTQwNzIyLTQuNTE5MDU0IDUuMTQwNzIyLTQuMjkxOTA1QzUuMTQwNzIyLTQuMDA0OTgxIDUuMzY3ODctMy45MDkzNCA1LjUzNTI0My0zLjkwOTM0QzUuODkzODk4LTMuOTA5MzQgNi4xNDQ5NTYtNC4yMjAxNzQgNi4xNDQ5NTYtNC41NDI5NjRDNi4xNDQ5NTYtNS4wNDUwODEgNS41NzExMDgtNS4yNzIyMjkgNS4wNjg5OTEtNS4yNzIyMjlDNC4zMzk3MjYtNS4yNzIyMjkgMy45MzMyNS00LjU1NDkxOSAzLjgyNTY1NC00LjMyNzc3MUMzLjU1MDY4NS01LjIyNDQwOCAyLjgwOTQ2NS01LjI3MjIyOSAyLjU5NDI3MS01LjI3MjIyOUMxLjM3NDg0NC01LjI3MjIyOSAuNzI5MjY1LTMuNzA2MTAyIC43MjkyNjUtMy40NDMwODhDLjcyOTI2NS0zLjM5NTI2OCAuNzc3MDg2LTMuMzM1NDkyIC44NjA3NzItMy4zMzU0OTJDLjk1NjQxMy0zLjMzNTQ5MiAuOTgwMzI0LTMuNDA3MjIzIDEuMDA0MjM0LTMuNDU1MDQ0QzEuNDEwNzEtNC43ODIwNjcgMi4yMTE3MDYtNS4wMzMxMjYgMi41NTg0MDYtNS4wMzMxMjZDMy4wOTYzODktNS4wMzMxMjYgMy4yMDM5ODUtNC41MzEwMDkgMy4yMDM5ODUtNC4yNDQwODVDMy4yMDM5ODUtMy45ODEwNzEgMy4xMzIyNTQtMy43MDYxMDIgMi45ODg3OTItMy4xMzIyNTRMMi41ODIzMTYtMS40OTQzOTZDMi40MDI5ODktLjc3NzA4NiAyLjA1NjI4OS0uMTE5NTUyIDEuNDIyNjY1LS4xMTk1NTJDMS4zNjI4ODktLjExOTU1MiAxLjA2NDAxLS4xMTk1NTIgLjgxMjk1MS0uMjc0OTY5QzEuMjQzMzM3LS4zNTg2NTUgMS4zMzg5NzktLjcxNzMxIDEuMzM4OTc5LS44NjA3NzJDMS4zMzg5NzktMS4wOTk4NzUgMS4xNTk2NTEtMS4yNDMzMzcgLjkzMjUwMy0xLjI0MzMzN0MuNjQ1NTc5LTEuMjQzMzM3IC4zMzQ3NDUtLjk5MjI3OSAuMzM0NzQ1LS42MDk3MTRDLjMzNDc0NS0uMTA3NTk3IC44OTY2MzggLjExOTU1MiAxLjQxMDcxIC4xMTk1NTJDMS45ODQ1NTggLjExOTU1MiAyLjM5MTAzNC0uMzM0NzQ1IDIuNjQyMDkyLS44MjQ5MDdDMi44MzMzNzUtLjExOTU1MiAzLjQzMTEzMyAuMTE5NTUyIDMuODczNDc0IC4xMTk1NTJDNS4wOTI5MDIgLjExOTU1MiA1LjczODQ4MS0xLjQ0NjU3NSA1LjczODQ4MS0xLjcwOTU4OUM1LjczODQ4MS0xLjc2OTM2NSA1LjY5MDY2LTEuODE3MTg2IDUuNjE4OTI5LTEuODE3MTg2QzUuNTExMzMzLTEuODE3MTg2IDUuNDk5Mzc3LTEuNzU3NDEgNS40NjM1MTItMS42NjE3NjhDNS4xNDA3MjItLjYwOTcxNCA0LjQ0NzMyMy0uMTE5NTUyIDMuOTA5MzQtLjExOTU1MkMzLjQ5MDkwOS0uMTE5NTUyIDMuMjYzNzYxLS40MzAzODYgMy4yNjM3NjEtLjkyMDU0OEMzLjI2Mzc2MS0xLjE4MzU2MiAzLjMxMTU4Mi0xLjM3NDg0NCAzLjUwMjg2NC0yLjE2Mzg4NUwzLjkyMTI5NS0zLjc4OTc4OEM0LjEwMDYyMy00LjUwNzA5OCA0LjUwNzA5OC01LjAzMzEyNiA1LjA1NzAzNi01LjAzMzEyNkM1LjA4MDk0Ni01LjAzMzEyNiA1LjQxNTY5MS01LjAzMzEyNiA1LjY2Njc1LTQuODc3NzA5WicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nNC45ODEzMzUnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC03NicvPgo8dXNlIHg9JzEyLjk0NTg0MicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMTcuNDk4MTY3JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtMTInLz4KPHVzZSB4PScyNC43Njk0MzgnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC01OScvPgo8dXNlIHg9JzMwLjAxMzU5NycgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTI3Jy8+Cjx1c2UgeD0nMzYuNDQ1NjY5JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtNTknLz4KPHVzZSB4PSc0MS42ODk4MjgnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzQ4LjUxODMxNicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nNjMuMDMzMjk0JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtNjEnLz4KPHVzZSB4PSc5OS4yOTg2MzUnIHk9Jy00MS45NTYzNTcnIHhsaW5rOmhyZWY9JyNnNi00OScvPgo8cmVjdCB4PSc4My4yOTYxMTQnIHk9Jy0zNy4wOTY0ODQnIGhlaWdodD0nLjQ3ODE4Nycgd2lkdGg9JzM3Ljg1ODAxNycvPgo8dXNlIHg9JzgzLjI5NjExNCcgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nODcuODQ4NDQnIHk9Jy0yNS42Njc5MzYnIHhsaW5rOmhyZWY9JyNnNi01MCcvPgo8dXNlIHg9JzkzLjcwMTQzJyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzQtMjUnLz4KPHVzZSB4PScxMDAuNzcwNycgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTA1LjMyMzAyNicgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2czLTc4Jy8+Cjx1c2UgeD0nMTEyLjE4NzYzNCcgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2czLTYxJy8+Cjx1c2UgeD0nMTE2LjQyMTgxNycgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMTI1LjAwNjMwOScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2cyLTInLz4KPHVzZSB4PScxNTMuNjA1NzM0JyB5PSctNDEuOTU2MzU3JyB4bGluazpocmVmPScjZzYtNDknLz4KPHJlY3QgeD0nMTM4LjE1Njk4MycgeT0nLTM3LjA5NjQ4NCcgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nMzYuNzUwNDc2Jy8+Cjx1c2UgeD0nMTM4LjE1Njk4MycgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMTQyLjcwOTMwOScgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c0LTI3Jy8+Cjx1c2UgeD0nMTQ5Ljc5MTcxMycgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMTU0LjUyNDAyOCcgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTU5LjA3NjM1MycgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2czLTc4Jy8+Cjx1c2UgeD0nMTY1Ljk0MDk2MScgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2czLTYxJy8+Cjx1c2UgeD0nMTcwLjE3NTE0NCcgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMTc4Ljc1OTYzNicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2cyLTInLz4KPHVzZSB4PScxOTAuNzE0Nzk3JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtMTAxJy8+Cjx1c2UgeD0nMTk1LjkxNzQ1NScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTEyMCcvPgo8dXNlIHg9JzIwMi4wOTU2MTEnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi0xMTInLz4KPHVzZSB4PScyMTAuNTkxNDMxJyB5PSctNTQuMzEyMTIyJyB4bGluazpocmVmPScjZzAtMzQnLz4KPHVzZSB4PScyMTcuNTY1MzEnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnMi0wJy8+Cjx1c2UgeD0nMjMzLjk2NjY4OCcgeT0nLTQxLjk1NjM1NycgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+CjxyZWN0IHg9JzIyOC4wNTkzMjEnIHk9Jy0zNy4wOTY0ODQnIGhlaWdodD0nLjQ3ODE4Nycgd2lkdGg9JzE3LjY2NzcwOScvPgo8dXNlIHg9JzIyOC4wNTkzMjEnIHk9Jy0yNS42Njc5MzYnIHhsaW5rOmhyZWY9JyNnNi01MCcvPgo8dXNlIHg9JzIzMy45MTIzMTEnIHk9Jy0yNS42Njc5MzYnIHhsaW5rOmhyZWY9JyNnNC0yNycvPgo8dXNlIHg9JzI0MC45OTQ3MTUnIHk9Jy0yOS4xMjE2NDQnIHhsaW5rOmhyZWY9JyNnNS01MCcvPgo8dXNlIHg9JzI0OC45MTUwNDEnIHk9Jy00OC44MTI2MTknIHhsaW5rOmhyZWY9JyNnMy03OCcvPgo8dXNlIHg9JzI1Ni40ODUzNDYnIHk9Jy00OC44MTI2MTknIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nMjYzLjA3MTg1MycgeT0nLTQ4LjgxMjYxOScgeGxpbms6aHJlZj0nI2c1LTQ5Jy8+Cjx1c2UgeD0nMjQ5LjQ3NjIzJyB5PSctNDUuMjI2MDYzJyB4bGluazpocmVmPScjZzAtODgnLz4KPHVzZSB4PScyNTAuMzg5Mzg2JyB5PSctMTkuNzY1ODQ0JyB4bGluazpocmVmPScjZzMtMTA3Jy8+Cjx1c2UgeD0nMjU1LjAxMTAwMicgeT0nLTE5Ljc2NTg0NCcgeGxpbms6aHJlZj0nI2c1LTYxJy8+Cjx1c2UgeD0nMjYxLjU5NzUwOCcgeT0nLTE5Ljc2NTg0NCcgeGxpbms6aHJlZj0nI2c1LTQ4Jy8+Cjx1c2UgeD0nMjY5LjI5ODUzNCcgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMjczLjg1MDg1OScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTEwNCcvPgo8dXNlIHg9JzI4MC41ODk0MTQnIHk9Jy0zMi4wNzUzMzUnIHhsaW5rOmhyZWY9JyNnMy0yMScvPgo8dXNlIHg9JzI4Ni4wMjc0MjYnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzI5MC41Nzk3NTInIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0xMjAnLz4KPHVzZSB4PScyOTcuMjMxODM5JyB5PSctMzIuMDc1MzM1JyB4bGluazpocmVmPScjZzMtMTA3Jy8+Cjx1c2UgeD0nMzAyLjM1MTU4NycgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMzA5LjU2MDU3NicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2cyLTAnLz4KPHVzZSB4PSczMjEuNTE1NzM2JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtMTInLz4KPHVzZSB4PSczMjguNzg3MDA3JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PSczMzMuMzM5MzI1JyB5PSctMzkuNjgwMTMzJyB4bGluazpocmVmPScjZzUtNTAnLz4KPHVzZSB4PSczMzguMDcxNjQnIHk9Jy01NC4zMTIxMjInIHhsaW5rOmhyZWY9JyNnMC0zNScvPgo8dXNlIHg9JzgyLjEwMDYwMScgeT0nLTE0LjE0Njk0NicgeGxpbms6aHJlZj0nI2cwLTEyNCcvPgo8cmVjdCB4PSc4Ny40ODA0ODEnIHk9Jy0xNS41ODE1MzgnIGhlaWdodD0nMS40MzQ1OTInIHdpZHRoPScxMjAuNzEyNjg3Jy8+Cjx1c2UgeD0nMjA4LjE5MzE2OCcgeT0nLTE0LjE0Njk0NicgeGxpbms6aHJlZj0nI2cwLTEyMycvPgo8dXNlIHg9JzIxMy41NzMwNDgnIHk9Jy0xNC4xNDY5NDYnIHhsaW5rOmhyZWY9JyNnMC0xMjInLz4KPHJlY3QgeD0nMjE4Ljk1MjkyOScgeT0nLTE1LjU4MTUzOCcgaGVpZ2h0PScxLjQzNDU5Micgd2lkdGg9JzEyMC43MTI2ODcnLz4KPHVzZSB4PSczMzkuNjY1NjE2JyB5PSctMTQuMTQ2OTQ2JyB4bGluazpocmVmPScjZzAtMTI1Jy8+Cjx1c2UgeD0nMjAwLjY2NzExNScgeT0nLTMuMTg4MDQyJyB4bGluazpocmVmPScjZzUtOScvPgo8dXNlIHg9JzIwNy4yNTM2MjInIHk9Jy0zLjE4ODA0MicgeGxpbms6aHJlZj0nI2c1LTQwJy8+Cjx1c2UgeD0nMjEwLjU0Njg3NScgeT0nLTMuMTg4MDQyJyB4bGluazpocmVmPScjZzMtMTInLz4KPHVzZSB4PScyMTUuNzA4MTIzJyB5PSctMy4xODgwNDInIHhsaW5rOmhyZWY9JyNnMy01OScvPgo8dXNlIHg9JzIxOC4wNjA0NDcnIHk9Jy0zLjE4ODA0MicgeGxpbms6aHJlZj0nI2czLTI3Jy8+Cjx1c2UgeD0nMjIzLjE4NTc0MycgeT0nLTMuMTg4MDQyJyB4bGluazpocmVmPScjZzUtNDEnLz4KPHVzZSB4PSczNDcuMDM3OTk0JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzItMicvPgo8dXNlIHg9JzM1OC4zMjg5ODgnIHk9Jy00Mi44MzUwNScgeGxpbms6aHJlZj0nI2cwLTgxJy8+Cjx1c2UgeD0nMzY5LjYyMDAwNicgeT0nLTM5LjY4MDIwOScgeGxpbms6aHJlZj0nI2czLTc4Jy8+Cjx1c2UgeD0nMzc3LjE5MDMxMScgeT0nLTM5LjY4MDIwOScgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PSczODMuNzc2ODE3JyB5PSctMzkuNjgwMjA5JyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PSczNjkuNjIwMDA2JyB5PSctMzAuMzgxNTk4JyB4bGluazpocmVmPScjZzMtMTA3Jy8+Cjx1c2UgeD0nMzc0LjI0MTYyMScgeT0nLTMwLjM4MTU5OCcgeGxpbms6aHJlZj0nI2c1LTYxJy8+Cjx1c2UgeD0nMzgwLjgyODEyOCcgeT0nLTMwLjM4MTU5OCcgeGxpbms6aHJlZj0nI2c1LTQ4Jy8+Cjx1c2UgeD0nMzkwLjUwMTYzJyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtMTIwJy8+Cjx1c2UgeD0nMzk3LjE1MzcxNycgeT0nLTM4LjgxNjczMycgeGxpbms6aHJlZj0nI2czLTIxJy8+Cjx1c2UgeD0nNDAyLjA5MzU5NycgeT0nLTM4LjgxNjczMycgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PSc0MDguNjgwMTA0JyB5PSctMzguODE2NzMzJyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PSczOTcuMTUzNzE3JyB5PSctMzAuNTM4OTIxJyB4bGluazpocmVmPScjZzMtMTA3Jy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9MCAtLT4=)
We notice that for each fixed
, the likelihood equation is proportional to the likelihood equation which estimates  .
.Thus, the maximum likelihood estimators for
 for a given are :
for a given are :
Substituting these expressions in the likelihood equation and taking the
 likelihood leads to:
likelihood leads to:![\begin{array}{lcl}
\ell(\lambda) = \log L( \hat{\beta}(\lambda), \hat{\sigma}(\lambda),\lambda ) & = & C -
\frac{N}{2}
\log\left[\hat{\sigma}^2(\lambda)\right]
\;+\;
\left(\lambda - 1 \right) \sum_{k=0}^{N-1} \log(x_i)\,,%\qquad mbox{where :math:`C` is a constant.}
\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMyAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPSczODIuOTU2ODA3cHQnIGhlaWdodD0nMTUuNTc5NjM0cHQnIHZpZXdCb3g9JzQuOTgxMzM1IC0xNS42NDEzNTMgMzgyLjk1NjgwNyAxNS41Nzk2MzQnPgo8ZGVmcz4KPHBhdGggaWQ9J2cxLTAnIGQ9J001LjU3MTEwOC0xLjgwOTIxNUM1LjY5ODYzLTEuODA5MjE1IDUuODczOTczLTEuODA5MjE1IDUuODczOTczLTEuOTkyNTI4UzUuNjk4NjMtMi4xNzU4NDEgNS41NzExMDgtMi4xNzU4NDFIMS4wMDQyMzRDLjg3NjcxMi0yLjE3NTg0MSAuNzAxMzctMi4xNzU4NDEgLjcwMTM3LTEuOTkyNTI4Uy44NzY3MTItMS44MDkyMTUgMS4wMDQyMzQtMS44MDkyMTVINS41NzExMDhaJy8+CjxwYXRoIGlkPSdnMC04MCcgZD0nTTUuMDMzMTI2IDYuMzg0MDZMLjc4OTA0MSAxMS42MzIzNzlDLjY5MzQgMTEuNzUxOTMgLjY4MTQ0NSAxMS43NzU4NDEgLjY4MTQ0NSAxMS44MjM2NjFDLjY4MTQ0NSAxMS45NTUxNjggLjc4OTA0MSAxMS45NTUxNjggMS4wMDQyMzQgMTEuOTU1MTY4SDEwLjkxNTA2OEwxMS45NDMyMTMgOC45NzgzMzFIMTEuNjQ0MzM0QzExLjM0NTQ1NSA5Ljg3NDk2OSAxMC41NDQ0NTggMTAuNjA0MjM0IDkuNTI4MjY5IDEwLjk1MDkzNEM5LjMzNjk4NiAxMS4wMTA3MSA4LjUxMjA4IDExLjI5NzYzNCA2Ljc1NDY3IDExLjI5NzYzNEgxLjY3MzcyNEw1LjgyMjE2NyA2LjE2ODg2N0M1LjkwNTg1MyA2LjA2MTI3IDUuOTI5NzYzIDYuMDI1NDA1IDUuOTI5NzYzIDUuOTc3NTg0UzUuOTE3ODA4IDUuOTE3ODA4IDUuODQ2MDc3IDUuODEwMjEyTDEuOTYwNjQ4IC40NzgyMDdINi42OTQ4OTRDOC4wNTc3ODMgLjQ3ODIwNyAxMC44MDc0NzIgLjU2MTg5MyAxMS42NDQzMzQgMi43OTc1MDlIMTEuOTQzMjEzTDEwLjkxNTA2OCAwSDEuMDA0MjM0Qy42ODE0NDUgMCAuNjY5NDg5IC4wMTE5NTUgLjY2OTQ4OSAuMzgyNTY1TDUuMDMzMTI2IDYuMzg0MDZaJy8+CjxwYXRoIGlkPSdnNS00OCcgZD0nTTMuODk3Mzg1LTIuNTQyNDY2QzMuODk3Mzg1LTMuMzk1MjY4IDMuODA5NzE0LTMuOTEzMzI1IDMuNTQ2Ny00LjQyMzQxMkMzLjE5NjAxNS01LjEyNDc4MiAyLjU1MDQzNi01LjMwMDEyNSAyLjExMjA4LTUuMzAwMTI1QzEuMTA3ODQ2LTUuMzAwMTI1IC43NDEyMi00LjU1MDkzNCAuNjI5NjM5LTQuMzI3NzcxQy4zNDI3MTUtMy43NDU5NTMgLjMyNjc3NS0yLjk1NjkxMiAuMzI2Nzc1LTIuNTQyNDY2Qy4zMjY3NzUtMi4wMTY0MzggLjM1MDY4NS0xLjIxMTQ1NyAuNzMzMjUtLjU3Mzg0OEMxLjA5OTg3NSAuMDE1OTQgMS42ODk2NjQgLjE2NzM3MiAyLjExMjA4IC4xNjczNzJDMi40OTQ2NDUgLjE2NzM3MiAzLjE4MDA3NSAuMDQ3ODIxIDMuNTc4NTgtLjc0MTIyQzMuODczNDc0LTEuMzE1MDY4IDMuODk3Mzg1LTIuMDI0NDA4IDMuODk3Mzg1LTIuNTQyNDY2Wk0yLjExMjA4LS4wNTU3OTFDMS44NDEwOTYtLjA1NTc5MSAxLjI5MTE1OC0uMTgzMzEzIDEuMTIzNzg2LTEuMDIwMTc0QzEuMDM2MTE1LTEuNDc0NDcxIDEuMDM2MTE1LTIuMjIzNjYxIDEuMDM2MTE1LTIuNjM4MTA3QzEuMDM2MTE1LTMuMTg4MDQ1IDEuMDM2MTE1LTMuNzQ1OTUzIDEuMTIzNzg2LTQuMTg0MzA5QzEuMjkxMTU4LTQuOTk3MjYgMS45MTI4MjctNS4wNzY5NjEgMi4xMTIwOC01LjA3Njk2MUMyLjM4MzA2NC01LjA3Njk2MSAyLjkzMzAwMS00Ljk0MTQ2OSAzLjA5MjQwMy00LjIxNjE4OUMzLjE4ODA0NS0zLjc3NzgzMyAzLjE4ODA0NS0zLjE4MDA3NSAzLjE4ODA0NS0yLjYzODEwN0MzLjE4ODA0NS0yLjE2Nzg3IDMuMTg4MDQ1LTEuNDUwNTYgMy4wOTI0MDMtMS4wMDQyMzRDMi45MjUwMzEtLjE2NzM3MiAyLjM3NTA5My0uMDU1NzkxIDIuMTEyMDgtLjA1NTc5MVonLz4KPHBhdGggaWQ9J2c1LTQ5JyBkPSdNMi41MDI2MTUtNS4wNzY5NjFDMi41MDI2MTUtNS4yOTIxNTQgMi40ODY2NzUtNS4zMDAxMjUgMi4yNzE0ODItNS4zMDAxMjVDMS45NDQ3MDctNC45ODEzMiAxLjUyMjI5MS00Ljc5MDAzNyAuNzY1MTMxLTQuNzkwMDM3Vi00LjUyNzAyNEMuOTgwMzI0LTQuNTI3MDI0IDEuNDEwNzEtNC41MjcwMjQgMS44NzI5NzYtNC43NDIyMTdWLS42NTM1NDlDMS44NzI5NzYtLjM1ODY1NSAxLjg0OTA2Ni0uMjYzMDE0IDEuMDkxOTA1LS4yNjMwMTRILjgxMjk1MVYwQzEuMTM5NzI2LS4wMjM5MSAxLjgyNTE1Ni0uMDIzOTEgMi4xODM4MTEtLjAyMzkxUzMuMjM1ODY2LS4wMjM5MSAzLjU2MjY0IDBWLS4yNjMwMTRIMy4yODM2ODZDMi41MjY1MjYtLjI2MzAxNCAyLjUwMjYxNS0uMzU4NjU1IDIuNTAyNjE1LS42NTM1NDlWLTUuMDc2OTYxWicvPgo8cGF0aCBpZD0nZzUtNTAnIGQ9J00yLjI0NzU3Mi0xLjYyNTkwM0MyLjM3NTA5My0xLjc0NTQ1NSAyLjcwOTgzOC0yLjAwODQ2OCAyLjgzNzM2LTIuMTIwMDVDMy4zMzE1MDctMi41NzQzNDYgMy44MDE3NDMtMy4wMTI3MDIgMy44MDE3NDMtMy43Mzc5ODNDMy44MDE3NDMtNC42ODY0MjYgMy4wMDQ3MzItNS4zMDAxMjUgMi4wMDg0NjgtNS4zMDAxMjVDMS4wNTIwNTUtNS4zMDAxMjUgLjQyMjQxNi00LjU3NDg0NCAuNDIyNDE2LTMuODY1NTA0Qy40MjI0MTYtMy40NzQ5NjkgLjczMzI1LTMuNDE5MTc4IC44NDQ4MzItMy40MTkxNzhDMS4wMTIyMDQtMy40MTkxNzggMS4yNTkyNzgtMy41Mzg3MyAxLjI1OTI3OC0zLjg0MTU5NEMxLjI1OTI3OC00LjI1NjA0IC44NjA3NzItNC4yNTYwNCAuNzY1MTMxLTQuMjU2MDRDLjk5NjI2NC00LjgzNzg1OCAxLjUzMDI2Mi01LjAzNzExMSAxLjkyMDc5Ny01LjAzNzExMUMyLjY2MjAxNy01LjAzNzExMSAzLjA0NDU4My00LjQwNzQ3MiAzLjA0NDU4My0zLjczNzk4M0MzLjA0NDU4My0yLjkwOTA5MSAyLjQ2Mjc2NS0yLjMwMzM2MiAxLjUyMjI5MS0xLjMzODk3OUwuNTE4MDU3LS4zMDI4NjRDLjQyMjQxNi0uMjE1MTkzIC40MjI0MTYtLjE5OTI1MyAuNDIyNDE2IDBIMy41NzA2MUwzLjgwMTc0My0xLjQyNjY1SDMuNTU0NjdDMy41MzA3Ni0xLjI2NzI0OCAzLjQ2Njk5OS0uODY4NzQyIDMuMzcxMzU3LS43MTczMUMzLjMyMzUzNy0uNjUzNTQ5IDIuNzE3ODA4LS42NTM1NDkgMi41OTAyODYtLjY1MzU0OUgxLjE3MTYwNkwyLjI0NzU3Mi0xLjYyNTkwM1onLz4KPHBhdGggaWQ9J2c1LTYxJyBkPSdNNS44MjYxNTItMi42NTQwNDdDNS45NDU3MDQtMi42NTQwNDcgNi4xMDUxMDYtMi42NTQwNDcgNi4xMDUxMDYtMi44MzczNlM1LjkxMzgyMy0zLjAyMDY3MiA1Ljc5NDI3MS0zLjAyMDY3MkguNzgxMDcxQy42NjE1MTktMy4wMjA2NzIgLjQ3MDIzNy0zLjAyMDY3MiAuNDcwMjM3LTIuODM3MzZTLjYyOTYzOS0yLjY1NDA0NyAuNzQ5MTkxLTIuNjU0MDQ3SDUuODI2MTUyWk01Ljc5NDI3MS0uOTY0Mzg0QzUuOTEzODIzLS45NjQzODQgNi4xMDUxMDYtLjk2NDM4NCA2LjEwNTEwNi0xLjE0NzY5NlM1Ljk0NTcwNC0xLjMzMTAwOSA1LjgyNjE1Mi0xLjMzMTAwOUguNzQ5MTkxQy42Mjk2MzktMS4zMzEwMDkgLjQ3MDIzNy0xLjMzMTAwOSAuNDcwMjM3LTEuMTQ3Njk2Uy42NjE1MTktLjk2NDM4NCAuNzgxMDcxLS45NjQzODRINS43OTQyNzFaJy8+CjxwYXRoIGlkPSdnMy03OCcgZD0nTTYuMzEyMzI5LTQuNTc0ODQ0QzYuNDA3OTctNC45NjUzOCA2LjU4MzMxMy01LjE1NjY2MyA3LjE1NzE2MS01LjE4MDU3M0M3LjIzNjg2Mi01LjE4MDU3MyA3LjMwMDYyMy01LjIyODM5NCA3LjMwMDYyMy01LjMzMjAwNUM3LjMwMDYyMy01LjM3OTgyNiA3LjI2MDc3Mi01LjQ0MzU4NyA3LjE4MTA3MS01LjQ0MzU4N0M3LjEyNTI4LTUuNDQzNTg3IDYuOTczODQ4LTUuNDE5Njc2IDYuMzg0MDYtNS40MTk2NzZDNS43NDY0NTEtNS40MTk2NzYgNS42NDI4MzktNS40NDM1ODcgNS41NzExMDgtNS40NDM1ODdDNS40NDM1ODctNS40NDM1ODcgNS40MTk2NzYtNS4zNTU5MTUgNS40MTk2NzYtNS4yOTIxNTRDNS40MTk2NzYtNS4xODg1NDMgNS41MjMyODgtNS4xODA1NzMgNS41OTUwMTktNS4xODA1NzNDNi4wODExOTYtNS4xNjQ2MzMgNi4wODExOTYtNC45NDk0NCA2LjA4MTE5Ni00LjgzNzg1OEM2LjA4MTE5Ni00Ljc5ODAwNyA2LjA4MTE5Ni00Ljc1ODE1NyA2LjA0OTMxNS00LjYzMDYzNUw1LjE3MjYwMy0xLjEzOTcyNkwzLjI1MTgwNi01LjMwMDEyNUMzLjE4ODA0NS01LjQ0MzU4NyAzLjE3MjEwNS01LjQ0MzU4NyAyLjk4MDgyMi01LjQ0MzU4N0gxLjk0NDcwN0MxLjgwMTI0NS01LjQ0MzU4NyAxLjY5NzYzNC01LjQ0MzU4NyAxLjY5NzYzNC01LjI5MjE1NEMxLjY5NzYzNC01LjE4MDU3MyAxLjc5MzI3NS01LjE4MDU3MyAxLjk2MDY0OC01LjE4MDU3M0MyLjAyNDQwOC01LjE4MDU3MyAyLjI2MzUxMi01LjE4MDU3MyAyLjQ0NjgyNC01LjEzMjc1MkwxLjM3ODgyOS0uODUyODAyQzEuMjgzMTg4LS40NTQyOTYgMS4wNzU5NjUtLjI3ODk1NCAuNTQxOTY4LS4yNjMwMTRDLjQ5NDE0Ny0uMjYzMDE0IC4zOTg1MDYtLjI1NTA0NCAuMzk4NTA2LS4xMTE1ODJDLjM5ODUwNi0uMDYzNzYxIC40MzgzNTYgMCAuNTE4MDU3IDBDLjU0OTkzOCAwIC43MzMyNS0uMDIzOTEgMS4zMDcwOTgtLjAyMzkxQzEuOTM2NzM3LS4wMjM5MSAyLjA1NjI4OSAwIDIuMTI4MDIgMEMyLjE1OTkgMCAyLjI3OTQ1MiAwIDIuMjc5NDUyLS4xNTE0MzJDMi4yNzk0NTItLjI0NzA3MyAyLjE5MTc4MS0uMjYzMDE0IDIuMTM1OTktLjI2MzAxNEMxLjg0OTA2Ni0uMjcwOTg0IDEuNjA5OTYzLS4zMTg4MDQgMS42MDk5NjMtLjU5Nzc1OEMxLjYwOTk2My0uNjM3NjA5IDEuNjMzODczLS43NDkxOTEgMS42MzM4NzMtLjc1NzE2MUwyLjY3Nzk1OC00LjkxNzU1OUgyLjY4NTkyOEw0LjkwMTYxOS0uMTQzNDYyQzQuOTU3NDEtLjAxNTk0IDQuOTY1MzggMCA1LjA1MzA1MSAwQzUuMTY0NjMzIDAgNS4xNzI2MDMtLjAzMTg4IDUuMjA0NDgzLS4xNjczNzJMNi4zMTIzMjktNC41NzQ4NDRaJy8+CjxwYXRoIGlkPSdnMy0xMDUnIGQ9J00yLjM3NTA5My00Ljk3MzM1QzIuMzc1MDkzLTUuMTQ4NjkyIDIuMjQ3NTcyLTUuMjc2MjE0IDIuMDY0MjU5LTUuMjc2MjE0QzEuODU3MDM2LTUuMjc2MjE0IDEuNjI1OTAzLTUuMDg0OTMyIDEuNjI1OTAzLTQuODQ1ODI4QzEuNjI1OTAzLTQuNjcwNDg2IDEuNzUzNDI1LTQuNTQyOTY0IDEuOTM2NzM3LTQuNTQyOTY0QzIuMTQzOTYtNC41NDI5NjQgMi4zNzUwOTMtNC43MzQyNDcgMi4zNzUwOTMtNC45NzMzNVpNMS4yMTE0NTctMi4wNDgzMTlMLjc4MTA3MS0uOTQ4NDQzQy43NDEyMi0uODI4ODkyIC43MDEzNy0uNzMzMjUgLjcwMTM3LS41OTc3NThDLjcwMTM3LS4yMDcyMjMgMS4wMDQyMzQgLjA3OTcwMSAxLjQyNjY1IC4wNzk3MDFDMi4xOTk3NTEgLjA3OTcwMSAyLjUyNjUyNi0xLjAzNjExNSAyLjUyNjUyNi0xLjEzOTcyNkMyLjUyNjUyNi0xLjIxOTQyNyAyLjQ2Mjc2NS0xLjI0MzMzNyAyLjQwNjk3NC0xLjI0MzMzN0MyLjMxMTMzMy0xLjI0MzMzNyAyLjI5NTM5Mi0xLjE4NzU0NyAyLjI3MTQ4Mi0xLjEwNzg0NkMyLjA4ODE2OS0uNDcwMjM3IDEuNzYxMzk1LS4xNDM0NjIgMS40NDI1OS0uMTQzNDYyQzEuMzQ2OTQ5LS4xNDM0NjIgMS4yNTEzMDgtLjE4MzMxMyAxLjI1MTMwOC0uMzk4NTA2QzEuMjUxMzA4LS41ODk3ODggMS4zMDcwOTgtLjczMzI1IDEuNDEwNzEtLjk4MDMyNEMxLjQ5MDQxMS0xLjE5NTUxNyAxLjU3MDExMi0xLjQxMDcxIDEuNjU3NzgzLTEuNjI1OTAzTDEuOTA0ODU3LTIuMjcxNDgyQzEuOTc2NTg4LTIuNDU0Nzk1IDIuMDcyMjI5LTIuNzAxODY4IDIuMDcyMjI5LTIuODM3MzZDMi4wNzIyMjktMy4yMzU4NjYgMS43NTM0MjUtMy41MTQ4MTkgMS4zNDY5NDktMy41MTQ4MTlDLjU3Mzg0OC0zLjUxNDgxOSAuMjM5MTAzLTIuMzk5MDA0IC4yMzkxMDMtMi4yOTUzOTJDLjIzOTEwMy0yLjIyMzY2MSAuMjk0ODk0LTIuMTkxNzgxIC4zNTg2NTUtMi4xOTE3ODFDLjQ2MjI2Ny0yLjE5MTc4MSAuNDcwMjM3LTIuMjM5NjAxIC40OTQxNDctMi4zMTkzMDNDLjcxNzMxLTMuMDc2NDYzIDEuMDgzOTM1LTMuMjkxNjU2IDEuMzIzMDM5LTMuMjkxNjU2QzEuNDM0NjItMy4yOTE2NTYgMS41MTQzMjEtMy4yNTE4MDYgMS41MTQzMjEtMy4wMjg2NDNDMS41MTQzMjEtMi45NDg5NDEgMS41MDYzNTEtMi44MzczNiAxLjQyNjY1LTIuNTk4MjU3TDEuMjExNDU3LTIuMDQ4MzE5WicvPgo8cGF0aCBpZD0nZzMtMTA3JyBkPSdNMi4zMjcyNzMtNS4yOTIxNTRDMi4zMzUyNDMtNS4zMDgwOTUgMi4zNTkxNTMtNS40MTE3MDYgMi4zNTkxNTMtNS40MTk2NzZDMi4zNTkxNTMtNS40NTk1MjcgMi4zMjcyNzMtNS41MzEyNTggMi4yMzE2MzEtNS41MzEyNThDMi4xOTk3NTEtNS41MzEyNTggMS45NTI2NzctNS41MDczNDcgMS43NjkzNjUtNS40OTE0MDdMMS4zMjMwMzktNS40NTk1MjdDMS4xNDc2OTYtNS40NDM1ODcgMS4wNjc5OTUtNS40MzU2MTYgMS4wNjc5OTUtNS4yOTIxNTRDMS4wNjc5OTUtNS4xODA1NzMgMS4xNzk1NzctNS4xODA1NzMgMS4yNzUyMTgtNS4xODA1NzNDMS42NTc3ODMtNS4xODA1NzMgMS42NTc3ODMtNS4xMzI3NTIgMS42NTc3ODMtNS4wNjEwMjFDMS42NTc3ODMtNS4wMzcxMTEgMS42NTc3ODMtNS4wMjExNzEgMS42MTc5MzMtNC44Nzc3MDlMLjQ4NjE3Ny0uMzQyNzE1Qy40NTQyOTYtLjIyMzE2MyAuNDU0Mjk2LS4xNzUzNDIgLjQ1NDI5Ni0uMTY3MzcyQy40NTQyOTYtLjAzMTg4IC41NjU4NzggLjA3OTcwMSAuNzE3MzEgLjA3OTcwMUMuOTg4Mjk0IC4wNzk3MDEgMS4wNTIwNTUtLjE3NTM0MiAxLjA4MzkzNS0uMjg2OTI0QzEuMTYzNjM2LS42MjE2NjkgMS4zNzA4NTktMS40NjY1MDEgMS40NTg1MzEtMS44MDEyNDVDMS44OTY4ODctMS43NTM0MjUgMi40MzA4ODQtMS42MDE5OTMgMi40MzA4ODQtMS4xNDc2OTZDMi40MzA4ODQtMS4xMDc4NDYgMi40MzA4ODQtMS4wNjc5OTUgMi40MTQ5NDQtLjk4ODI5NEMyLjM5MTAzNC0uODg0NjgyIDIuMzc1MDkzLS43NzMxMDEgMi4zNzUwOTMtLjczMzI1QzIuMzc1MDkzLS4yNjMwMTQgMi43MjU3NzggLjA3OTcwMSAzLjE4ODA0NSAuMDc5NzAxQzMuNTIyNzkgLjA3OTcwMSAzLjczMDAxMi0uMTY3MzcyIDMuODMzNjI0LS4zMTg4MDRDNC4wMjQ5MDctLjYxMzY5OSA0LjE1MjQyOC0xLjA5MTkwNSA0LjE1MjQyOC0xLjEzOTcyNkM0LjE1MjQyOC0xLjIxOTQyNyA0LjA4ODY2Ny0xLjI0MzMzNyA0LjAzMjg3Ny0xLjI0MzMzN0MzLjkzNzIzNS0xLjI0MzMzNyAzLjkyMTI5NS0xLjE5NTUxNyAzLjg4OTQxNS0xLjA1MjA1NUMzLjc4NTgwMy0uNjc3NDYgMy41Nzg1OC0uMTQzNDYyIDMuMjAzOTg1LS4xNDM0NjJDMi45OTY3NjItLjE0MzQ2MiAyLjk0ODk0MS0uMzE4ODA0IDIuOTQ4OTQxLS41MzM5OThDMi45NDg5NDEtLjYzNzYwOSAyLjk1NjkxMi0uNzMzMjUgMi45OTY3NjItLjkxNjU2M0MzLjAwNDczMi0uOTQ4NDQzIDMuMDM2NjEzLTEuMDc1OTY1IDMuMDM2NjEzLTEuMTYzNjM2QzMuMDM2NjEzLTEuODE3MTg2IDIuMjE1NjkxLTEuOTYwNjQ4IDEuODA5MjE1LTIuMDE2NDM4QzIuMTA0MTEtMi4xOTE3ODEgMi4zNzUwOTMtMi40NjI3NjUgMi40NzA3MzUtMi41NjYzNzZDMi45MDkwOTEtMi45OTY3NjIgMy4yNjc3NDYtMy4yOTE2NTYgMy42NTAzMTEtMy4yOTE2NTZDMy43NTM5MjMtMy4yOTE2NTYgMy44NDk1NjQtMy4yNjc3NDYgMy45MTMzMjUtMy4xODgwNDVDMy40ODI5MzktMy4xMzIyNTQgMy40ODI5MzktMi43NTc2NTkgMy40ODI5MzktMi43NDk2ODlDMy40ODI5MzktMi41NzQzNDYgMy42MTg0MzEtMi40NTQ3OTUgMy43OTM3NzMtMi40NTQ3OTVDNC4wMDg5NjYtMi40NTQ3OTUgNC4yNDgwNy0yLjYzMDEzNyA0LjI0ODA3LTIuOTU2OTEyQzQuMjQ4MDctMy4yMjc4OTUgNC4wNTY3ODctMy41MTQ4MTkgMy42NTgyODEtMy41MTQ4MTlDMy4xOTYwMTUtMy41MTQ4MTkgMi43ODE1NjktMy4xNjQxMzQgMi4zMjcyNzMtMi43MDk4MzhDMS44NjUwMDYtMi4yNTU1NDIgMS42NjU3NTMtMi4xNjc4NyAxLjUzODIzMi0yLjExMjA4TDIuMzI3MjczLTUuMjkyMTU0WicvPgo8cGF0aCBpZD0nZzItMCcgZD0nTTcuODc4NDU2LTIuNzQ5Njg5QzguMDgxNjk0LTIuNzQ5Njg5IDguMjk2ODg3LTIuNzQ5Njg5IDguMjk2ODg3LTIuOTg4NzkyUzguMDgxNjk0LTMuMjI3ODk1IDcuODc4NDU2LTMuMjI3ODk1SDEuNDEwNzFDMS4yMDc0NzItMy4yMjc4OTUgLjk5MjI3OS0zLjIyNzg5NSAuOTkyMjc5LTIuOTg4NzkyUzEuMjA3NDcyLTIuNzQ5Njg5IDEuNDEwNzEtMi43NDk2ODlINy44Nzg0NTZaJy8+CjxwYXRoIGlkPSdnNi00MCcgZD0nTTMuODg1NDMgMi45MDUxMDZDMy44ODU0MyAyLjg2OTI0IDMuODg1NDMgMi44NDUzMyAzLjY4MjE5MiAyLjY0MjA5MkMyLjQ4NjY3NSAxLjQzNDYyIDEuODE3MTg2LS41Mzc5ODMgMS44MTcxODYtMi45NzY4MzdDMS44MTcxODYtNS4yOTYxMzkgMi4zNzkwNzgtNy4yOTI2NTMgMy43NjU4NzgtOC43MDMzNjJDMy44ODU0My04LjgxMDk1OSAzLjg4NTQzLTguODM0ODY5IDMuODg1NDMtOC44NzA3MzVDMy44ODU0My04Ljk0MjQ2NiAzLjgyNTY1NC04Ljk2NjM3NiAzLjc3NzgzMy04Ljk2NjM3NkMzLjYyMjQxNi04Ljk2NjM3NiAyLjY0MjA5Mi04LjEwNTYwNCAyLjA1NjI4OS02LjkzMzk5OEMxLjQ0NjU3NS01LjcyNjUyNiAxLjE3MTYwNi00LjQ0NzMyMyAxLjE3MTYwNi0yLjk3NjgzN0MxLjE3MTYwNi0xLjkxMjgyNyAxLjMzODk3OS0uNDkwMTYyIDEuOTYwNjQ4IC43ODkwNDFDMi42NjYwMDIgMi4yMjM2NjEgMy42NDYzMjYgMy4wMDA3NDcgMy43Nzc4MzMgMy4wMDA3NDdDMy44MjU2NTQgMy4wMDA3NDcgMy44ODU0MyAyLjk3NjgzNyAzLjg4NTQzIDIuOTA1MTA2WicvPgo8cGF0aCBpZD0nZzYtNDEnIGQ9J00zLjM3MTM1Ny0yLjk3NjgzN0MzLjM3MTM1Ny0zLjg4NTQzIDMuMjUxODA2LTUuMzY3ODcgMi41ODIzMTYtNi43NTQ2N0MxLjg3Njk2MS04LjE4OTI5IC44OTY2MzgtOC45NjYzNzYgLjc2NTEzMS04Ljk2NjM3NkMuNzE3MzEtOC45NjYzNzYgLjY1NzUzNC04Ljk0MjQ2NiAuNjU3NTM0LTguODcwNzM1Qy42NTc1MzQtOC44MzQ4NjkgLjY1NzUzNC04LjgxMDk1OSAuODYwNzcyLTguNjA3NzIxQzIuMDU2Mjg5LTcuNDAwMjQ5IDIuNzI1Nzc4LTUuNDI3NjQ2IDIuNzI1Nzc4LTIuOTg4NzkyQzIuNzI1Nzc4LS42Njk0ODkgMi4xNjM4ODUgMS4zMjcwMjQgLjc3NzA4NiAyLjczNzczM0MuNjU3NTM0IDIuODQ1MzMgLjY1NzUzNCAyLjg2OTI0IC42NTc1MzQgMi45MDUxMDZDLjY1NzUzNCAyLjk3NjgzNyAuNzE3MzEgMy4wMDA3NDcgLjc2NTEzMSAzLjAwMDc0N0MuOTIwNTQ4IDMuMDAwNzQ3IDEuOTAwODcyIDIuMTM5OTc1IDIuNDg2Njc1IC45NjgzNjlDMy4wOTYzODktLjI1MTA1OSAzLjM3MTM1Ny0xLjU0MjIxNyAzLjM3MTM1Ny0yLjk3NjgzN1onLz4KPHBhdGggaWQ9J2c2LTQzJyBkPSdNNC43NzAxMTItMi43NjE2NDRIOC4wNjk3MzhDOC4yMzcxMTEtMi43NjE2NDQgOC40NTIzMDQtMi43NjE2NDQgOC40NTIzMDQtMi45NzY4MzdDOC40NTIzMDQtMy4yMDM5ODUgOC4yNDkwNjYtMy4yMDM5ODUgOC4wNjk3MzgtMy4yMDM5ODVINC43NzAxMTJWLTYuNTAzNjExQzQuNzcwMTEyLTYuNjcwOTg0IDQuNzcwMTEyLTYuODg2MTc3IDQuNTU0OTE5LTYuODg2MTc3QzQuMzI3NzcxLTYuODg2MTc3IDQuMzI3NzcxLTYuNjgyOTM5IDQuMzI3NzcxLTYuNTAzNjExVi0zLjIwMzk4NUgxLjAyODE0NEMuODYwNzcyLTMuMjAzOTg1IC42NDU1NzktMy4yMDM5ODUgLjY0NTU3OS0yLjk4ODc5MkMuNjQ1NTc5LTIuNzYxNjQ0IC44NDg4MTctMi43NjE2NDQgMS4wMjgxNDQtMi43NjE2NDRINC4zMjc3NzFWLjUzNzk4M0M0LjMyNzc3MSAuNzA1MzU1IDQuMzI3NzcxIC45MjA1NDggNC41NDI5NjQgLjkyMDU0OEM0Ljc3MDExMiAuOTIwNTQ4IDQuNzcwMTEyIC43MTczMSA0Ljc3MDExMiAuNTM3OTgzVi0yLjc2MTY0NFonLz4KPHBhdGggaWQ9J2c2LTQ5JyBkPSdNMy40NDMwODgtNy42NjMyNjNDMy40NDMwODgtNy45MzgyMzIgMy40NDMwODgtNy45NTAxODcgMy4yMDM5ODUtNy45NTAxODdDMi45MTcwNjEtNy42MjczOTcgMi4zMTkzMDMtNy4xODUwNTYgMS4wODc5Mi03LjE4NTA1NlYtNi44MzgzNTZDMS4zNjI4ODktNi44MzgzNTYgMS45NjA2NDgtNi44MzgzNTYgMi42MTgxODItNy4xNDkxOTFWLS45MjA1NDhDMi42MTgxODItLjQ5MDE2MiAyLjU4MjMxNi0uMzQ2NyAxLjUzMDI2Mi0uMzQ2N0gxLjE1OTY1MVYwQzEuNDgyNDQxLS4wMjM5MSAyLjY0MjA5Mi0uMDIzOTEgMy4wMzY2MTMtLjAyMzkxUzQuNTc4ODI5LS4wMjM5MSA0LjkwMTYxOSAwVi0uMzQ2N0g0LjUzMTAwOUMzLjQ3ODk1NC0uMzQ2NyAzLjQ0MzA4OC0uNDkwMTYyIDMuNDQzMDg4LS45MjA1NDhWLTcuNjYzMjYzWicvPgo8cGF0aCBpZD0nZzYtNjEnIGQ9J004LjA2OTczOC0zLjg3MzQ3NEM4LjIzNzExMS0zLjg3MzQ3NCA4LjQ1MjMwNC0zLjg3MzQ3NCA4LjQ1MjMwNC00LjA4ODY2N0M4LjQ1MjMwNC00LjMxNTgxNiA4LjI0OTA2Ni00LjMxNTgxNiA4LjA2OTczOC00LjMxNTgxNkgxLjAyODE0NEMuODYwNzcyLTQuMzE1ODE2IC42NDU1NzktNC4zMTU4MTYgLjY0NTU3OS00LjEwMDYyM0MuNjQ1NTc5LTMuODczNDc0IC44NDg4MTctMy44NzM0NzQgMS4wMjgxNDQtMy44NzM0NzRIOC4wNjk3MzhaTTguMDY5NzM4LTEuNjQ5ODEzQzguMjM3MTExLTEuNjQ5ODEzIDguNDUyMzA0LTEuNjQ5ODEzIDguNDUyMzA0LTEuODY1MDA2QzguNDUyMzA0LTIuMDkyMTU0IDguMjQ5MDY2LTIuMDkyMTU0IDguMDY5NzM4LTIuMDkyMTU0SDEuMDI4MTQ0Qy44NjA3NzItMi4wOTIxNTQgLjY0NTU3OS0yLjA5MjE1NCAuNjQ1NTc5LTEuODc2OTYxQy42NDU1NzktMS42NDk4MTMgLjg0ODgxNy0xLjY0OTgxMyAxLjAyODE0NC0xLjY0OTgxM0g4LjA2OTczOFonLz4KPHBhdGggaWQ9J2c2LTkxJyBkPSdNMi45ODg3OTIgMi45ODg3OTJWMi41NDY0NTFIMS44MjkxNDFWLTguNTI0MDM1SDIuOTg4NzkyVi04Ljk2NjM3NkgxLjM4NjhWMi45ODg3OTJIMi45ODg3OTJaJy8+CjxwYXRoIGlkPSdnNi05MycgZD0nTTEuODUzMDUxLTguOTY2Mzc2SC4yNTEwNTlWLTguNTI0MDM1SDEuNDEwNzFWMi41NDY0NTFILjI1MTA1OVYyLjk4ODc5MkgxLjg1MzA1MVYtOC45NjYzNzZaJy8+CjxwYXRoIGlkPSdnNi05NCcgZD0nTTIuOTI5MDE2LTguMjk2ODg3TDEuMzYyODg5LTYuNjcwOTg0TDEuNTU0MTcyLTYuNDkxNjU2TDIuOTE3MDYxLTcuNzIzMDM5TDQuMjkxOTA1LTYuNDkxNjU2TDQuNDgzMTg4LTYuNjcwOTg0TDIuOTI5MDE2LTguMjk2ODg3WicvPgo8cGF0aCBpZD0nZzYtMTAzJyBkPSdNMS40MjI2NjUtMi4xNjM4ODVDMS45ODQ1NTgtMS43OTMyNzUgMi40NjI3NjUtMS43OTMyNzUgMi41OTQyNzEtMS43OTMyNzVDMy42NzAyMzctMS43OTMyNzUgNC40NzEyMzMtMi42MDYyMjcgNC40NzEyMzMtMy41MjY3NzVDNC40NzEyMzMtMy44NDk1NjQgNC4zNzU1OTItNC4zMDM4NjEgMy45OTMwMjYtNC42ODY0MjZDNC40NTkyNzgtNS4xNjQ2MzMgNS4wMjExNzEtNS4xNjQ2MzMgNS4wODA5NDYtNS4xNjQ2MzNDNS4xMjg3NjctNS4xNjQ2MzMgNS4xODg1NDMtNS4xNjQ2MzMgNS4yMzYzNjQtNS4xNDA3MjJDNS4xMTY4MTItNS4wOTI5MDIgNS4wNTcwMzYtNC45NzMzNSA1LjA1NzAzNi00Ljg0MTg0M0M1LjA1NzAzNi00LjY3NDQ3MSA1LjE3NjU4OC00LjUzMTAwOSA1LjM2Nzg3LTQuNTMxMDA5QzUuNDYzNTEyLTQuNTMxMDA5IDUuNjc4NzA1LTQuNTkwNzg1IDUuNjc4NzA1LTQuODUzNzk4QzUuNjc4NzA1LTUuMDY4OTkxIDUuNTExMzMzLTUuNDAzNzM2IDUuMDkyOTAyLTUuNDAzNzM2QzQuNDcxMjMzLTUuNDAzNzM2IDQuMDA0OTgxLTUuMDIxMTcxIDMuODM3NjA5LTQuODQxODQzQzMuNDc4OTU0LTUuMTE2ODEyIDMuMDYwNTIzLTUuMjcyMjI5IDIuNjA2MjI3LTUuMjcyMjI5QzEuNTMwMjYyLTUuMjcyMjI5IC43MjkyNjUtNC40NTkyNzggLjcyOTI2NS0zLjUzODczQy43MjkyNjUtMi44NTcyODUgMS4xNDc2OTYtMi40MTQ5NDQgMS4yNjcyNDgtMi4zMDczNDdDMS4xMjM3ODYtMi4xMjgwMiAuOTA4NTkzLTEuNzgxMzIgLjkwODU5My0xLjMxNTA2OEMuOTA4NTkzLS42MjE2NjkgMS4zMjcwMjQtLjMyMjc5IDEuNDIyNjY1LS4yNjMwMTRDLjg3MjcyNy0uMTA3NTk3IC4zMjI3OSAuMzIyNzkgLjMyMjc5IC45NDQ0NThDLjMyMjc5IDEuNzY5MzY1IDEuNDQ2NTc1IDIuNDUwODA5IDIuOTE3MDYxIDIuNDUwODA5QzQuMzM5NzI2IDIuNDUwODA5IDUuNTIzMjg4IDEuODE3MTg2IDUuNTIzMjg4IC45MjA1NDhDNS41MjMyODggLjYyMTY2OSA1LjQzOTYwMS0uMDgzNjg2IDQuNzIyMjkxLS40NTQyOTZDNC4xMTI1NzgtLjc2NTEzMSAzLjUxNDgxOS0uNzY1MTMxIDIuNDg2Njc1LS43NjUxMzFDMS43NTc0MS0uNzY1MTMxIDEuNjczNzI0LS43NjUxMzEgMS40NTg1MzEtLjk5MjI3OUMxLjMzODk3OS0xLjExMTgzMSAxLjIzMTM4Mi0xLjMzODk3OSAxLjIzMTM4Mi0xLjU5MDAzN0MxLjIzMTM4Mi0xLjc5MzI3NSAxLjMwMzExMy0xLjk5NjUxMyAxLjQyMjY2NS0yLjE2Mzg4NVpNMi42MDYyMjctMi4wNDQzMzRDMS41NTQxNzItMi4wNDQzMzQgMS41NTQxNzItMy4yNTE4MDYgMS41NTQxNzItMy41MjY3NzVDMS41NTQxNzItMy43NDE5NjggMS41NTQxNzItNC4yMzIxMyAxLjc1NzQxLTQuNTU0OTE5QzEuOTg0NTU4LTQuOTAxNjE5IDIuMzQzMjEzLTUuMDIxMTcxIDIuNTk0MjcxLTUuMDIxMTcxQzMuNjQ2MzI2LTUuMDIxMTcxIDMuNjQ2MzI2LTMuODEzNjk5IDMuNjQ2MzI2LTMuNTM4NzNDMy42NDYzMjYtMy4zMjM1MzcgMy42NDYzMjYtMi44MzMzNzUgMy40NDMwODgtMi41MTA1ODVDMy4yMTU5NC0yLjE2Mzg4NSAyLjg1NzI4NS0yLjA0NDMzNCAyLjYwNjIyNy0yLjA0NDMzNFpNMi45MjkwMTYgMi4xOTk3NTFDMS43ODEzMiAyLjE5OTc1MSAuOTA4NTkzIDEuNjEzOTQ4IC45MDg1OTMgLjkzMjUwM0MuOTA4NTkzIC44MzY4NjIgLjkzMjUwMyAuMzcwNjEgMS4zODY4IC4wNTk3NzZDMS42NDk4MTMtLjEwNzU5NyAxLjc1NzQxLS4xMDc1OTcgMi41OTQyNzEtLjEwNzU5N0MzLjU4NjU1LS4xMDc1OTcgNC45Mzc0ODQtLjEwNzU5NyA0LjkzNzQ4NCAuOTMyNTAzQzQuOTM3NDg0IDEuNjM3ODU4IDQuMDI4ODkyIDIuMTk5NzUxIDIuOTI5MDE2IDIuMTk5NzUxWicvPgo8cGF0aCBpZD0nZzYtMTA4JyBkPSdNMi4wNTYyODktOC4yOTY4ODdMLjM5NDUyMS04LjE2NTM4Vi03LjgxODY4QzEuMjA3NDcyLTcuODE4NjggMS4zMDMxMTMtNy43MzQ5OTQgMS4zMDMxMTMtNy4xNDkxOTFWLS44ODQ2ODJDMS4zMDMxMTMtLjM0NjcgMS4xNzE2MDYtLjM0NjcgLjM5NDUyMS0uMzQ2N1YwQy43MjkyNjUtLjAyMzkxIDEuMzE1MDY4LS4wMjM5MSAxLjY3MzcyNC0uMDIzOTFTMi42MzAxMzctLjAyMzkxIDIuOTY0ODgyIDBWLS4zNDY3QzIuMTk5NzUxLS4zNDY3IDIuMDU2Mjg5LS4zNDY3IDIuMDU2Mjg5LS44ODQ2ODJWLTguMjk2ODg3WicvPgo8cGF0aCBpZD0nZzYtMTExJyBkPSdNNS40ODc0MjItMi41NTg0MDZDNS40ODc0MjItNC4xMDA2MjMgNC4zMTU4MTYtNS4zMzIwMDUgMi45MjkwMTYtNS4zMzIwMDVDMS40OTQzOTYtNS4zMzIwMDUgLjM1ODY1NS00LjA2NDc1NyAuMzU4NjU1LTIuNTU4NDA2Qy4zNTg2NTUtMS4wMjgxNDQgMS41NTQxNzIgLjExOTU1MiAyLjkxNzA2MSAuMTE5NTUyQzQuMzI3NzcxIC4xMTk1NTIgNS40ODc0MjItMS4wNTIwNTUgNS40ODc0MjItMi41NTg0MDZaTTIuOTI5MDE2LS4xNDM0NjJDMi40ODY2NzUtLjE0MzQ2MiAxLjk0ODY5Mi0uMzM0NzQ1IDEuNjAxOTkzLS45MjA1NDhDMS4yNzkyMDMtMS40NTg1MzEgMS4yNjcyNDgtMi4xNjM4ODUgMS4yNjcyNDgtMi42NjYwMDJDMS4yNjcyNDgtMy4xMjAyOTkgMS4yNjcyNDgtMy44NDk1NjQgMS42Mzc4NTgtNC4zODc1NDdDMS45NzI2MDMtNC45MDE2MTkgMi40OTg2My01LjA5MjkwMiAyLjkxNzA2MS01LjA5MjkwMkMzLjM4MzMxMy01LjA5MjkwMiAzLjg4NTQzLTQuODc3NzA5IDQuMjA4MjE5LTQuNDExNDU3QzQuNTc4ODI5LTMuODYxNTE5IDQuNTc4ODI5LTMuMTA4MzQ0IDQuNTc4ODI5LTIuNjY2MDAyQzQuNTc4ODI5LTIuMjQ3NTcyIDQuNTc4ODI5LTEuNTA2MzUxIDQuMjY3OTk1LS45NDQ0NThDMy45MzMyNS0uMzcwNjEgMy4zODMzMTMtLjE0MzQ2MiAyLjkyOTAxNi0uMTQzNDYyWicvPgo8cGF0aCBpZD0nZzQtMTInIGQ9J002Ljc2NjYyNS02Ljk1NzkwOEM2Ljc2NjYyNS03LjY3NTIxOCA2LjE1NjkxMi04LjQyODM5NCA1LjA2ODk5MS04LjQyODM5NEMzLjUyNjc3NS04LjQyODM5NCAyLjU0NjQ1MS02LjUzOTQ3NyAyLjIzNTYxNi01LjI5NjEzOUwuMzQ2NyAyLjE5OTc1MUMuMzIyNzkgMi4yOTUzOTIgLjM5NDUyMSAyLjMxOTMwMyAuNDU0Mjk2IDIuMzE5MzAzQy41Mzc5ODMgMi4zMTkzMDMgLjU5Nzc1OCAyLjMwNzM0NyAuNjA5NzE0IDIuMjQ3NTcyTDEuNDQ2NTc1LTEuMDk5ODc1QzEuNTY2MTI3LS40MzAzODYgMi4yMjM2NjEgLjExOTU1MiAyLjkyOTAxNiAuMTE5NTUyQzQuNjM4NjA1IC4xMTk1NTIgNi4yNTI1NTMtMS4yMTk0MjcgNi4yNTI1NTMtMy4wMDA3NDdDNi4yNTI1NTMtMy40NTUwNDQgNi4xNDQ5NTYtMy45MDkzNCA1Ljg5Mzg5OC00LjI5MTkwNUM1Ljc1MDQzNi00LjUxOTA1NCA1LjU3MTEwOC00LjY4NjQyNiA1LjM3OTgyNi00LjgyOTg4OEM2LjI0MDU5OC01LjI4NDE4NCA2Ljc2NjYyNS02LjAxMzQ1IDYuNzY2NjI1LTYuOTU3OTA4Wk00LjY4NjQyNi00Ljg0MTg0M0M0LjQ5NTE0My00Ljc3MDExMiA0LjMwMzg2MS00Ljc0NjIwMiA0LjA3NjcxMi00Ljc0NjIwMkMzLjkwOTM0LTQuNzQ2MjAyIDMuNzUzOTIzLTQuNzM0MjQ3IDMuNTM4NzMtNC44MDU5NzhDMy42NTgyODEtNC44ODk2NjQgMy44Mzc2MDktNC45MTM1NzQgNC4wODg2NjctNC45MTM1NzRDNC4zMDM4NjEtNC45MTM1NzQgNC41MTkwNTQtNC44ODk2NjQgNC42ODY0MjYtNC44NDE4NDNaTTYuMTQ0OTU2LTcuMDY1NTA0QzYuMTQ0OTU2LTYuNDA3OTcgNS44MjIxNjctNS40NTE1NTcgNS4wNDUwODEtNS4wMDkyMTVDNC44MTc5MzMtNS4wOTI5MDIgNC41MDcwOTgtNS4xNTI2NzcgNC4yNDQwODUtNS4xNTI2NzdDMy45OTMwMjYtNS4xNTI2NzcgMy4yNzU3MTYtNS4xNzY1ODggMy4yNzU3MTYtNC43OTQwMjJDMy4yNzU3MTYtNC40NzEyMzMgMy45MzMyNS00LjUwNzA5OCA0LjEzNjQ4OC00LjUwNzA5OEM0LjQ0NzMyMy00LjUwNzA5OCA0LjcyMjI5MS00LjU3ODgyOSA1LjAwOTIxNS00LjY2MjUxNkM1LjM5MTc4MS00LjM1MTY4MSA1LjU1OTE1My0zLjk0NTIwNSA1LjU1OTE1My0zLjM0NzQ0N0M1LjU1OTE1My0yLjY1NDA0NyA1LjM2Nzg3LTIuMDkyMTU0IDUuMTQwNzIyLTEuNTc4MDgyQzQuNzQ2MjAyLS42OTM0IDMuODEzNjk5LS4xMTk1NTIgMi45ODg3OTItLjExOTU1MkMyLjExNjA2NS0uMTE5NTUyIDEuNjYxNzY4LS44MTI5NTEgMS42NjE3NjgtMS42MjU5MDNDMS42NjE3NjgtMS43MzM0OTkgMS42NjE3NjgtMS44ODg5MTcgMS43MDk1ODktMi4wNjgyNDRMMi40ODY2NzUtNS4yMTI0NTNDMi44ODExOTYtNi43Nzg1OCAzLjg4NTQzLTguMTg5MjkgNS4wNDUwODEtOC4xODkyOUM1LjkwNTg1My04LjE4OTI5IDYuMTQ0OTU2LTcuNTkxNTMyIDYuMTQ0OTU2LTcuMDY1NTA0WicvPgo8cGF0aCBpZD0nZzQtMjEnIGQ9J00zLjY5NDE0Ny03LjQ0ODA3QzMuMzk1MjY4LTguMjk2ODg3IDIuNDUwODA5LTguMjk2ODg3IDIuMjk1MzkyLTguMjk2ODg3QzIuMjIzNjYxLTguMjk2ODg3IDIuMDkyMTU0LTguMjk2ODg3IDIuMDkyMTU0LTguMTc3MzM1QzIuMDkyMTU0LTguMDgxNjk0IDIuMTYzODg1LTguMDY5NzM4IDIuMjIzNjYxLTguMDU3NzgzQzIuNDAyOTg5LTguMDMzODczIDIuNTQ2NDUxLTguMDA5OTYzIDIuNzM3NzMzLTcuNjYzMjYzQzIuODU3Mjg1LTcuNDM2MTE1IDQuMDg4NjY3LTMuODYxNTE5IDQuMDg4NjY3LTMuODM3NjA5QzQuMDg4NjY3LTMuODI1NjU0IDQuMDc2NzEyLTMuODEzNjk5IDMuOTgxMDcxLTMuNzE4MDU3TC44NzI3MjctLjU3Mzg0OEMuNzI5MjY1LS40MzAzODYgLjYzMzYyNC0uMzM0NzQ1IC42MzM2MjQtLjE3OTMyOEMuNjMzNjI0LS4wMTE5NTUgLjc3NzA4NiAuMTMxNTA3IC45NjgzNjkgLjEzMTUwN0MxLjAxNjE4OSAuMTMxNTA3IDEuMTQ3Njk2IC4xMDc1OTcgMS4yMTk0MjcgLjAzNTg2NkMxLjQxMDcxLS4xNDM0NjIgMy4xMjAyOTktMi4yMzU2MTYgNC4yMDgyMTktMy41MjY3NzVDNC41MTkwNTQtMi41OTQyNzEgNC45MDE2MTktMS40OTQzOTYgNS4yNzIyMjktLjQ5MDE2MkM1LjMzMjAwNS0uMzEwODM0IDUuMzkxNzgxLS4xNDM0NjIgNS41NTkxNTMgLjAxMTk1NUM1LjY3ODcwNSAuMTE5NTUyIDUuNzAyNjE1IC4xMTk1NTIgNi4wMzczNiAuMTE5NTUySDYuMjY0NTA4QzYuMzEyMzI5IC4xMTk1NTIgNi4zOTYwMTUgLjExOTU1MiA2LjM5NjAxNSAuMDIzOTFDNi4zOTYwMTUtLjAyMzkxIDYuMzg0MDYtLjAzNTg2NiA2LjMzNjIzOS0uMDgzNjg2QzYuMjI4NjQzLS4yMTUxOTMgNi4xNDQ5NTYtLjQzMDM4NiA2LjA5NzEzNi0uNTczODQ4TDMuNjk0MTQ3LTcuNDQ4MDdaJy8+CjxwYXRoIGlkPSdnNC0yNycgZD0nTTYuMDczMjI1LTQuNTA3MDk4QzYuMjI4NjQzLTQuNTA3MDk4IDYuNjIzMTYzLTQuNTA3MDk4IDYuNjIzMTYzLTQuODg5NjY0QzYuNjIzMTYzLTUuMTUyNjc3IDYuMzk2MDE1LTUuMTUyNjc3IDYuMTgwODIyLTUuMTUyNjc3SDMuNTM4NzNDMS43NDU0NTUtNS4xNTI2NzcgLjQ1NDI5Ni0zLjE1NjE2NCAuNDU0Mjk2LTEuNzQ1NDU1Qy40NTQyOTYtLjcyOTI2NSAxLjExMTgzMSAuMTE5NTUyIDIuMTg3Nzk2IC4xMTk1NTJDMy41OTg1MDYgLjExOTU1MiA1LjE0MDcyMi0xLjM5ODc1NSA1LjE0MDcyMi0zLjE5MjAzQzUuMTQwNzIyLTMuNjU4MjgxIDUuMDMzMTI2LTQuMTEyNTc4IDQuNzQ2MjAyLTQuNTA3MDk4SDYuMDczMjI1Wk0yLjE5OTc1MS0uMTE5NTUyQzEuNTkwMDM3LS4xMTk1NTIgMS4xNDc2OTYtLjU4NTgwMyAxLjE0NzY5Ni0xLjQxMDcxQzEuMTQ3Njk2LTIuMTI4MDIgMS41NzgwODItNC41MDcwOTggMy4zMzU0OTItNC41MDcwOThDMy44NDk1NjQtNC41MDcwOTggNC40MjM0MTItNC4yNTYwNCA0LjQyMzQxMi0zLjMzNTQ5MkM0LjQyMzQxMi0yLjkxNzA2MSA0LjIzMjEzLTEuOTEyODI3IDMuODEzNjk5LTEuMjE5NDI3QzMuMzgzMzEzLS41MTQwNzIgMi43Mzc3MzMtLjExOTU1MiAyLjE5OTc1MS0uMTE5NTUyWicvPgo8cGF0aCBpZD0nZzQtNTknIGQ9J00yLjMzMTI1OCAuMDQ3ODIxQzIuMzMxMjU4LS42NDU1NzkgMi4xMDQxMS0xLjE1OTY1MSAxLjYxMzk0OC0xLjE1OTY1MUMxLjIzMTM4Mi0xLjE1OTY1MSAxLjA0MDEtLjg0ODgxNyAxLjA0MDEtLjU4NTgwM1MxLjIxOTQyNyAwIDEuNjI1OTAzIDBDMS43ODEzMiAwIDEuOTEyODI3LS4wNDc4MjEgMi4wMjA0MjMtLjE1NTQxN0MyLjA0NDMzNC0uMTc5MzI4IDIuMDU2Mjg5LS4xNzkzMjggMi4wNjgyNDQtLjE3OTMyOEMyLjA5MjE1NC0uMTc5MzI4IDIuMDkyMTU0LS4wMTE5NTUgMi4wOTIxNTQgLjA0NzgyMUMyLjA5MjE1NCAuNDQyMzQxIDIuMDIwNDIzIDEuMjE5NDI3IDEuMzI3MDI0IDEuOTk2NTEzQzEuMTk1NTE3IDIuMTM5OTc1IDEuMTk1NTE3IDIuMTYzODg1IDEuMTk1NTE3IDIuMTg3Nzk2QzEuMTk1NTE3IDIuMjQ3NTcyIDEuMjU1MjkzIDIuMzA3MzQ3IDEuMzE1MDY4IDIuMzA3MzQ3QzEuNDEwNzEgMi4zMDczNDcgMi4zMzEyNTggMS40MjI2NjUgMi4zMzEyNTggLjA0NzgyMVonLz4KPHBhdGggaWQ9J2c0LTY3JyBkPSdNOC45MzA1MTEtOC4zMDg4NDJDOC45MzA1MTEtOC40MTY0MzggOC44NDY4MjQtOC40MTY0MzggOC44MjI5MTQtOC40MTY0MzhTOC43NTExODMtOC40MTY0MzggOC42NTU1NDItOC4yOTY4ODdMNy44MzA2MzUtNy4yOTI2NTNDNy40MTIyMDQtOC4wMDk5NjMgNi43NTQ2Ny04LjQxNjQzOCA1Ljg1ODAzMi04LjQxNjQzOEMzLjI3NTcxNi04LjQxNjQzOCAuNTk3NzU4LTUuNzk4MjU3IC41OTc3NTgtMi45ODg3OTJDLjU5Nzc1OC0uOTkyMjc5IDEuOTk2NTEzIC4yNTEwNTkgMy43NDE5NjggLjI1MTA1OUM0LjY5ODM4MSAuMjUxMDU5IDUuNTM1MjQzLS4xNTU0MTcgNi4yMjg2NDMtLjc0MTIyQzcuMjY4NzQyLTEuNjEzOTQ4IDcuNTc5NTc3LTIuNzczNTk5IDcuNTc5NTc3LTIuODY5MjRDNy41Nzk1NzctMi45NzY4MzcgNy40ODM5MzUtMi45NzY4MzcgNy40NDgwNy0yLjk3NjgzN0M3LjM0MDQ3My0yLjk3NjgzNyA3LjMyODUxOC0yLjkwNTEwNiA3LjMwNDYwOC0yLjg1NzI4NUM2Ljc1NDY3LS45OTIyNzkgNS4xNDA3MjItLjA5NTY0MSAzLjk0NTIwNS0uMDk1NjQxQzIuNjc3OTU4LS4wOTU2NDEgMS41NzgwODItLjkwODU5MyAxLjU3ODA4Mi0yLjYwNjIyN0MxLjU3ODA4Mi0yLjk4ODc5MiAxLjY5NzYzNC01LjA2ODk5MSAzLjA0ODU2OC02LjYzNTExOEMzLjcwNjEwMi03LjQwMDI0OSA0LjgyOTg4OC04LjA2OTczOCA1Ljk2NTYyOS04LjA2OTczOEM3LjI4MDY5Ny04LjA2OTczOCA3Ljg2NjUwMS02Ljk4MTgxOCA3Ljg2NjUwMS01Ljc2MjM5MUM3Ljg2NjUwMS01LjQ1MTU1NyA3LjgzMDYzNS01LjE4ODU0MyA3LjgzMDYzNS01LjE0MDcyMkM3LjgzMDYzNS01LjAzMzEyNiA3Ljk1MDE4Ny01LjAzMzEyNiA3Ljk4NjA1Mi01LjAzMzEyNkM4LjExNzU1OS01LjAzMzEyNiA4LjEyOTUxNC01LjA0NTA4MSA4LjE3NzMzNS01LjI2MDI3NEw4LjkzMDUxMS04LjMwODg0MlonLz4KPHBhdGggaWQ9J2c0LTc2JyBkPSdNNC4zODc1NDctNy4yNDQ4MzJDNC40OTUxNDMtNy42OTkxMjggNC41MzEwMDktNy44MTg2OCA1LjU4MzA2NC03LjgxODY4QzUuOTA1ODUzLTcuODE4NjggNS45ODk1MzktNy44MTg2OCA1Ljk4OTUzOS04LjA0NTgyOEM1Ljk4OTUzOS04LjE2NTM4IDUuODU4MDMyLTguMTY1MzggNS44MTAyMTItOC4xNjUzOEM1LjU3MTEwOC04LjE2NTM4IDUuMjk2MTM5LTguMTQxNDY5IDUuMDU3MDM2LTguMTQxNDY5SDMuNDU1MDQ0QzMuMjI3ODk1LTguMTQxNDY5IDIuOTY0ODgyLTguMTY1MzggMi43Mzc3MzMtOC4xNjUzOEMyLjY0MjA5Mi04LjE2NTM4IDIuNTEwNTg1LTguMTY1MzggMi41MTA1ODUtNy45MzgyMzJDMi41MTA1ODUtNy44MTg2OCAyLjYxODE4Mi03LjgxODY4IDIuNzk3NTA5LTcuODE4NjhDMy41MjY3NzUtNy44MTg2OCAzLjUyNjc3NS03LjcyMzAzOSAzLjUyNjc3NS03LjU5MTUzMkMzLjUyNjc3NS03LjU2NzYyMSAzLjUyNjc3NS03LjQ5NTg5IDMuNDc4OTU0LTcuMzE2NTYzTDEuODY1MDA2LS44ODQ2ODJDMS43NTc0MS0uNDY2MjUyIDEuNzMzNDk5LS4zNDY3IC44OTY2MzgtLjM0NjdDLjY2OTQ4OS0uMzQ2NyAuNTQ5OTM4LS4zNDY3IC41NDk5MzgtLjEzMTUwN0MuNTQ5OTM4IDAgLjYyMTY2OSAwIC44NjA3NzIgMEg2LjIxNjY4N0M2LjQ3OTcwMSAwIDYuNDkxNjU2LS4wMTE5NTUgNi41NzUzNDItLjIyNzE0OEw3LjQ5NTg5LTIuNzczNTk5QzcuNTE5ODAxLTIuODMzMzc1IDcuNTQzNzExLTIuOTA1MTA2IDcuNTQzNzExLTIuOTQwOTcxQzcuNTQzNzExLTMuMDEyNzAyIDcuNDgzOTM1LTMuMDYwNTIzIDcuNDI0MTU5LTMuMDYwNTIzQzcuNDEyMjA0LTMuMDYwNTIzIDcuMzUyNDI4LTMuMDYwNTIzIDcuMzI4NTE4LTMuMDEyNzAyQzcuMzA0NjA4LTMuMDAwNzQ3IDcuMzA0NjA4LTIuOTc2ODM3IDcuMjA4OTY2LTIuNzQ5Njg5QzYuODI2NDAxLTEuNjk3NjM0IDYuMjg4NDE4LS4zNDY3IDQuMjY3OTk1LS4zNDY3SDMuMTIwMjk5QzIuOTUyOTI3LS4zNDY3IDIuOTI5MDE2LS4zNDY3IDIuODU3Mjg1LS4zNTg2NTVDMi43MjU3NzgtLjM3MDYxIDIuNzEzODIzLS4zOTQ1MjEgMi43MTM4MjMtLjQ5MDE2MkMyLjcxMzgyMy0uNTczODQ4IDIuNzM3NzMzLS42NDU1NzkgMi43NjE2NDQtLjc1MzE3Nkw0LjM4NzU0Ny03LjI0NDgzMlonLz4KPHBhdGggaWQ9J2c0LTk2JyBkPSdNMS4wOTk4NzUtMi4wMzIzNzlDLjM0NjctMS4yOTExNTggLjE1NTQxNy0xLjExMTgzMSAuMTU1NDE3LTEuMDY0MDFTLjIwMzIzOC0uOTMyNTAzIC4yODY5MjQtLjkzMjUwM0MuMzQ2Ny0uOTMyNTAzIDEuMDI4MTQ0LTEuNTkwMDM3IDEuMTIzNzg2LTEuNjk3NjM0QzEuMTk1NTE3LS44OTY2MzggMS40OTQzOTYgLjE0MzQ2MiAyLjQyNjg5OSAuMTQzNDYyQzIuOTA1MTA2IC4xNDM0NjIgMy4zMzU0OTItLjE1NTQxNyAzLjUyNjc3NS0uMjk4ODc5QzMuNjgyMTkyLS40MTg0MzEgNC4yNTYwNC0uOTA4NTkzIDQuMjU2MDQtMS4wMTYxODlDNC4yNTYwNC0xLjA3NTk2NSA0LjE5NjI2NC0xLjE0NzY5NiA0LjEzNjQ4OC0xLjE0NzY5NkM0LjA4ODY2Ny0xLjE0NzY5NiAzLjkwOTM0LS45NjgzNjkgMy44NjE1MTktLjkyMDU0OEMzLjQ0MzA4OC0uNTE0MDcyIDIuOTE3MDYxLS4wOTU2NDEgMi40Mzg4NTQtLjA5NTY0MUMxLjc5MzI3NS0uMDk1NjQxIDEuNzA5NTg5LTEuMDI4MTQ0IDEuNzA5NTg5LTEuNjczNzI0QzEuNzA5NTg5LTEuNzkzMjc1IDEuNzA5NTg5LTIuMjk1MzkyIDEuNzkzMjc1LTIuMzkxMDM0QzIuNDk4NjMtMy4xMjAyOTkgNC43MTAzMzYtNS40MDM3MzYgNC43MTAzMzYtNy41MTk4MDFDNC43MTAzMzYtNy45OTgwMDcgNC41MzEwMDktOC40MTY0MzggNC4wMTY5MzYtOC40MTY0MzhDMi45MDUxMDYtOC40MTY0MzggMS45MzY3MzctNS45NTM2NzQgMS43NjkzNjUtNS40OTkzNzdDMS43MjE1NDQtNS4zNzk4MjYgMS4wMjgxNDQtMy41Mzg3MyAxLjA5OTg3NS0yLjAzMjM3OVpNMS44MTcxODYtMi43NzM1OTlDMS44MjkxNDEtMi44NDUzMyAyLjM2NzEyMy01Ljk3NzU4NCAzLjM3MTM1Ny03LjY1MTMwOEMzLjU3NDU5NS03Ljk3NDA5NyAzLjc3NzgzMy04LjE3NzMzNSA0LjAxNjkzNi04LjE3NzMzNUM0LjQyMzQxMi04LjE3NzMzNSA0LjQ0NzMyMy03Ljc5NDc3IDQuNDQ3MzIzLTcuNTMxNzU2QzQuNDQ3MzIzLTcuMTEzMzI1IDQuMzI3NzcxLTYuMDM3MzYgMy4yODc2NzEtNC41MzEwMDlDMi45NzY4MzctNC4wODg2NjcgMi40OTg2My0zLjQ5MDkwOSAxLjgxNzE4Ni0yLjc3MzU5OVonLz4KPHBhdGggaWQ9J2c0LTEyMCcgZD0nTTUuNjY2NzUtNC44Nzc3MDlDNS4yODQxODQtNC44MDU5NzggNS4xNDA3MjItNC41MTkwNTQgNS4xNDA3MjItNC4yOTE5MDVDNS4xNDA3MjItNC4wMDQ5ODEgNS4zNjc4Ny0zLjkwOTM0IDUuNTM1MjQzLTMuOTA5MzRDNS44OTM4OTgtMy45MDkzNCA2LjE0NDk1Ni00LjIyMDE3NCA2LjE0NDk1Ni00LjU0Mjk2NEM2LjE0NDk1Ni01LjA0NTA4MSA1LjU3MTEwOC01LjI3MjIyOSA1LjA2ODk5MS01LjI3MjIyOUM0LjMzOTcyNi01LjI3MjIyOSAzLjkzMzI1LTQuNTU0OTE5IDMuODI1NjU0LTQuMzI3NzcxQzMuNTUwNjg1LTUuMjI0NDA4IDIuODA5NDY1LTUuMjcyMjI5IDIuNTk0MjcxLTUuMjcyMjI5QzEuMzc0ODQ0LTUuMjcyMjI5IC43MjkyNjUtMy43MDYxMDIgLjcyOTI2NS0zLjQ0MzA4OEMuNzI5MjY1LTMuMzk1MjY4IC43NzcwODYtMy4zMzU0OTIgLjg2MDc3Mi0zLjMzNTQ5MkMuOTU2NDEzLTMuMzM1NDkyIC45ODAzMjQtMy40MDcyMjMgMS4wMDQyMzQtMy40NTUwNDRDMS40MTA3MS00Ljc4MjA2NyAyLjIxMTcwNi01LjAzMzEyNiAyLjU1ODQwNi01LjAzMzEyNkMzLjA5NjM4OS01LjAzMzEyNiAzLjIwMzk4NS00LjUzMTAwOSAzLjIwMzk4NS00LjI0NDA4NUMzLjIwMzk4NS0zLjk4MTA3MSAzLjEzMjI1NC0zLjcwNjEwMiAyLjk4ODc5Mi0zLjEzMjI1NEwyLjU4MjMxNi0xLjQ5NDM5NkMyLjQwMjk4OS0uNzc3MDg2IDIuMDU2Mjg5LS4xMTk1NTIgMS40MjI2NjUtLjExOTU1MkMxLjM2Mjg4OS0uMTE5NTUyIDEuMDY0MDEtLjExOTU1MiAuODEyOTUxLS4yNzQ5NjlDMS4yNDMzMzctLjM1ODY1NSAxLjMzODk3OS0uNzE3MzEgMS4zMzg5NzktLjg2MDc3MkMxLjMzODk3OS0xLjA5OTg3NSAxLjE1OTY1MS0xLjI0MzMzNyAuOTMyNTAzLTEuMjQzMzM3Qy42NDU1NzktMS4yNDMzMzcgLjMzNDc0NS0uOTkyMjc5IC4zMzQ3NDUtLjYwOTcxNEMuMzM0NzQ1LS4xMDc1OTcgLjg5NjYzOCAuMTE5NTUyIDEuNDEwNzEgLjExOTU1MkMxLjk4NDU1OCAuMTE5NTUyIDIuMzkxMDM0LS4zMzQ3NDUgMi42NDIwOTItLjgyNDkwN0MyLjgzMzM3NS0uMTE5NTUyIDMuNDMxMTMzIC4xMTk1NTIgMy44NzM0NzQgLjExOTU1MkM1LjA5MjkwMiAuMTE5NTUyIDUuNzM4NDgxLTEuNDQ2NTc1IDUuNzM4NDgxLTEuNzA5NTg5QzUuNzM4NDgxLTEuNzY5MzY1IDUuNjkwNjYtMS44MTcxODYgNS42MTg5MjktMS44MTcxODZDNS41MTEzMzMtMS44MTcxODYgNS40OTkzNzctMS43NTc0MSA1LjQ2MzUxMi0xLjY2MTc2OEM1LjE0MDcyMi0uNjA5NzE0IDQuNDQ3MzIzLS4xMTk1NTIgMy45MDkzNC0uMTE5NTUyQzMuNDkwOTA5LS4xMTk1NTIgMy4yNjM3NjEtLjQzMDM4NiAzLjI2Mzc2MS0uOTIwNTQ4QzMuMjYzNzYxLTEuMTgzNTYyIDMuMzExNTgyLTEuMzc0ODQ0IDMuNTAyODY0LTIuMTYzODg1TDMuOTIxMjk1LTMuNzg5Nzg4QzQuMTAwNjIzLTQuNTA3MDk4IDQuNTA3MDk4LTUuMDMzMTI2IDUuMDU3MDM2LTUuMDMzMTI2QzUuMDgwOTQ2LTUuMDMzMTI2IDUuNDE1NjkxLTUuMDMzMTI2IDUuNjY2NzUtNC44Nzc3MDlaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PSc0Ljk4MTMzNScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtOTYnLz4KPHVzZSB4PSc5Ljg5MzQ0MicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxNC40NDU3NjcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTIxJy8+Cjx1c2UgeD0nMjEuMjc0MjU2JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzI5LjE0NzQxMScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNjEnLz4KPHVzZSB4PSc0MS41NzI4OTInIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwOCcvPgo8dXNlIHg9JzQ0LjgyNDU1MycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTExJy8+Cjx1c2UgeD0nNTAuNjc3NTQzJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMDMnLz4KPHVzZSB4PSc1OC42ODU2MTQnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTc2Jy8+Cjx1c2UgeD0nNjYuNjUwMTIxJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzcyLjg4NzA5MycgeT0nLTcuMzM5MTYyJyB4bGluazpocmVmPScjZzYtOTQnLz4KPHVzZSB4PSc3MS4yMDI0NDcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTEyJy8+Cjx1c2UgeD0nNzguNDczNzE3JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzgzLjAyNjA0MycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMjEnLz4KPHVzZSB4PSc4OS44NTQ1MzInIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nOTQuNDA2ODU4JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC01OScvPgo8dXNlIHg9JzEwMC4yNjU3MzEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTk0Jy8+Cjx1c2UgeD0nOTkuNjUxMDE2JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yNycvPgo8dXNlIHg9JzEwNi43MzM0MicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxMTEuMjg1NzQ2JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzExOC4xMTQyMzUnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTIyLjY2NjU2MScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtNTknLz4KPHVzZSB4PScxMjcuOTEwNzE5JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzEzNC43MzkyMDgnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTQ5LjI1NDE4NScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNjEnLz4KPHVzZSB4PScxNjguMzIxNDkyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC02NycvPgo8dXNlIHg9JzE4MC4yMTE3NjgnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2cyLTAnLz4KPHVzZSB4PScxOTMuMzYyNDQyJyB5PSctOC44OTE0NzcnIHhsaW5rOmhyZWY9JyNnMy03OCcvPgo8cmVjdCB4PScxOTMuMzYyNDQyJyB5PSctNy40MTIyMzcnIGhlaWdodD0nLjQ3ODE4Nycgd2lkdGg9JzcuNTcwMzA1Jy8+Cjx1c2UgeD0nMTk1LjAzMDUwMycgeT0nLS4wNjE3MTknIHhsaW5rOmhyZWY9JyNnNS01MCcvPgo8dXNlIHg9JzIwNC4xMjA3NTknIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwOCcvPgo8dXNlIHg9JzIwNy4zNzI0MicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTExJy8+Cjx1c2UgeD0nMjEzLjIyNTQxJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMDMnLz4KPHVzZSB4PScyMjEuMjMzNDgxJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi05MScvPgo8dXNlIHg9JzIyNS4wOTk4NTcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTk0Jy8+Cjx1c2UgeD0nMjI0LjQ4NTE0MicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMjcnLz4KPHVzZSB4PScyMzEuNTY3NTQ2JyB5PSctOC41MjI3ODgnIHhsaW5rOmhyZWY9JyNnNS01MCcvPgo8dXNlIHg9JzIzNi4yOTk4NjEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMjQwLjg1MjE4NycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMjEnLz4KPHVzZSB4PScyNDcuNjgwNjc1JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzI1Mi4yMzMwMDEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTkzJy8+Cjx1c2UgeD0nMjYxLjQ2MjE1NScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDMnLz4KPHVzZSB4PScyNzYuNTQ0MycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScyODEuMDk2NjI1JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzI5MC41ODE3NzgnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2cyLTAnLz4KPHVzZSB4PSczMDIuNTM2OTM4JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00OScvPgo8dXNlIHg9JzMwOC4zODk5MjgnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMzE0LjkzNDc0NCcgeT0nLTEzLjE1MDgwNCcgeGxpbms6aHJlZj0nI2cwLTgwJy8+Cjx1c2UgeD0nMzI3LjU1NDEyNCcgeT0nLTkuOTk1OTYyJyB4bGluazpocmVmPScjZzMtNzgnLz4KPHVzZSB4PSczMzUuMTI0NDI5JyB5PSctOS45OTU5NjInIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nMzQxLjcxMDkzNicgeT0nLTkuOTk1OTYyJyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PSczMjcuNTU0MTI0JyB5PSctLjY5NzM1MScgeGxpbms6aHJlZj0nI2czLTEwNycvPgo8dXNlIHg9JzMzMi4xNzU3MzknIHk9Jy0uNjk3MzUxJyB4bGluazpocmVmPScjZzUtNjEnLz4KPHVzZSB4PSczMzguNzYyMjQ2JyB5PSctLjY5NzM1MScgeGxpbms6aHJlZj0nI2c1LTQ4Jy8+Cjx1c2UgeD0nMzQ4LjQzNTc0OCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTA4Jy8+Cjx1c2UgeD0nMzUxLjY4NzQwOScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTExJy8+Cjx1c2UgeD0nMzU3LjU0MDM5OScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTAzJy8+Cjx1c2UgeD0nMzYzLjU1NTk3MycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PSczNjguMTA4Mjk5JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0xMjAnLz4KPHVzZSB4PSczNzQuNzYwMzg2JyB5PSctMi4zOTEwODgnIHhsaW5rOmhyZWY9JyNnMy0xMDUnLz4KPHVzZSB4PSczNzguMTQxNjU3JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzM4NC42ODY0ODEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTU5Jy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9MCAtLT4=)
The parameter
 is the one maximizing
is the one maximizing  .
.In the case of surrogate model estimate, we note
the input sample of ,  the input sample of
the input sample of  .
We suppose the general linear model link
.
We suppose the general linear model link  with
with  :
:
 is a functional basis with
is a functional basis with  for all i,
for all i,  are the coefficients of the linear combination and
are the coefficients of the linear combination and  is a zero-mean gaussian process with a stationary covariance function
is a zero-mean gaussian process with a stationary covariance function  Thus implies that
Thus implies that  .
.The likelihood function to be maximized writes as follows:

where
 is the matrix resulted from the discretization of the covariance model over .
The parameter is the one maximizing
is the matrix resulted from the discretization of the covariance model over .
The parameter is the one maximizing  .
.Examples
Estimate the Box Cox transformation from a sample:
>>> import openturns as ot >>> sample = ot.Exponential(2).getSample(10) >>> factory = ot.BoxCoxFactory() >>> transform = factory.build(sample) >>> estimatedLambda = transform.getLambda()
Estimate the Box Cox transformation from a field:
>>> indices = [10, 5] >>> mesher = ot.IntervalMesher(indices) >>> interval = ot.Interval([0.0, 0.0], [2.0, 1.0]) >>> mesh = mesher.build(interval) >>> amplitude = [1.0] >>> scale = [0.2, 0.2] >>> covModel = ot.ExponentialModel(scale, amplitude) >>> Xproc = ot.GaussianProcess(covModel, mesh) >>> g = ot.SymbolicFunction(['x1'], ['exp(x1)']) >>> dynTransform = ot.ValueFunction(g, mesh) >>> XtProcess = ot.CompositeProcess(dynTransform, Xproc)
>>> field = XtProcess.getRealization() >>> transform = ot.BoxCoxFactory().build(field)
- buildWithGLM(*args)¶
Estimate the Box Cox transformation with general linear model.
Refer to
build()for details.- Parameters:
- inputSample, outputSample
Sampleor 2d-array The input and output samples of a model evaluated apart.
- covarianceModel
CovarianceModel Covariance model. Should have input dimension equal to input sample’s dimension and dimension equal to output sample’s dimension. See note for some particular applications.
- basis
Basis, optional Functional basis to estimate the trend:
 .
If
.
If  , the same basis is used for each marginal output.
, the same basis is used for each marginal output.- shift
Point It ensures that when shifted, the data are all positive. By default the opposite of the min vector of the data is used if some data are negative.
- inputSample, outputSample
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- generalLinearModelResult
GeneralLinearModelResult The structure that contains results of general linear model algorithm.
- transform
Examples
Estimation of a general linear model:
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> inputSample = ot.Uniform(-1.0, 1.0).getSample(20) >>> outputSample = ot.Sample(inputSample) >>> # Evaluation of y = ax + b (a: scale, b: translate) >>> outputSample = outputSample * [3] + [3.1] >>> # inverse transfo + small noise >>> def f(x): import math; return [math.exp(x[0])] >>> inv_transfo = ot.PythonFunction(1, 1, f) >>> outputSample = inv_transfo(outputSample) + ot.Normal(0, 1.0e-2).getSample(20) >>> # Estimation >>> basis = ot.LinearBasisFactory(1).build() >>> covarianceModel = ot.DiracCovarianceModel() >>> shift = [1.0e-1] >>> boxCox, result = ot.BoxCoxFactory().buildWithGLM(inputSample, outputSample, covarianceModel, basis, shift)
- buildWithGraph(*args)¶
Estimate the Box Cox transformation with graph output.
- Parameters:
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- graph
Graph The graph plots the evolution of the likelihood with respect to the value of
for each component i.
It enables to graphically detect the optimal values.
- transform
- buildWithLM(*args)¶
Estimate the Box Cox transformation with linear model.
Refer to
build()for details.- Parameters:
- inputSample, outputSample
Sampleor 2d-array The input and output samples of a model evaluated apart.
- covarianceModel
CovarianceModel Covariance model. Should have input dimension equal to input sample’s dimension and dimension equal to output sample’s dimension. See note for some particular applications.
- basis
Basis, optional Functional basis to estimate the trend:
.
If , the same basis is used for each marginal output.- shift
Point It ensures that when shifted, the data are all positive. By default the opposite of the min vector of the data is used if some data are negative.
- inputSample, outputSample
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- linearModelResult
LinearModelResult The structure that contains results of linear model algorithm.
- transform
Examples
Estimation of a linear model:
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> x = ot.Uniform(-1.0, 1.0).getSample(20) >>> y = ot.Sample(x) >>> # Evaluation of y = ax + b (a: scale, b: translate) >>> y = y * [3] + [3.1] >>> # inverse transformation >>> inv_transformation = ot.SymbolicFunction('x', 'exp(x)') >>> y = inv_transformation(y) + ot.Normal(0, 1.0e-4).getSample(20) >>> # Estimation >>> shift = [1.0e-1] >>> boxCox, result = ot.BoxCoxFactory().buildWithLM(x, y, shift)
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- getOptimizationAlgorithm()¶
Accessor to the solver.
- Returns:
- solver
OptimizationAlgorithm The solver used for numerical optimization.
- solver
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
- setOptimizationAlgorithm(solver)¶
Accessor to the solver.
- Parameters:
- solver
OptimizationAlgorithm The solver used for numerical optimization.
- solver