Apply a Box-Cox transformation to a Field¶
The objective of this Use Case is to estimate a Box Cox transformation from a field which all values are positive (eventually after a shift to satisfy the positiveness) and to apply it on the field. The object BoxCoxFactory enables to create a factory of Box Cox transformation. Then, we estimate the Box Cox transformation  from the initial field values
from the initial field values  thanks to the method build of the object
BoxCoxFactory, which produces an object of type BoxCoxTransform. If the field values have some negative values, it is possible to translate the values with respect a given shift
thanks to the method build of the object
BoxCoxFactory, which produces an object of type BoxCoxTransform. If the field values have some negative values, it is possible to translate the values with respect a given shift  which has to be mentioned either at the creation of the object BoxCoxFactory or when using the method build. Then the Box Cox transformation is the composition of and this translation.
which has to be mentioned either at the creation of the object BoxCoxFactory or when using the method build. Then the Box Cox transformation is the composition of and this translation.
The object BoxCoxTransform enables to:
transform the field values
 of dimension
of dimension  into the values
into the values  with stabilized variance, such that for each vertex
with stabilized variance, such that for each vertex  we have:
we have:
or

thanks to the operand (). The field based on the values
 shares the same mesh than the initial field.
shares the same mesh than the initial field.create the inverse Box Cox transformation such that :

or

thanks to the method getInverse() which produces an object of type InverseBoxCoxTransform that can be evaluated on a field. The new field based shares the same mesh than the initial field.
[1]:
from __future__ import print_function
import openturns as ot
[2]:
# Define a process
myIndices= ot.Indices([10,5])
myMesher =ot.IntervalMesher(myIndices)
myInterval = ot.Interval([0.0, 0.0], [2.0, 1.0])
myMesh = myMesher.build(myInterval)
amplitude = [1.0]
scale = [0.2, 0.2]
myCovModel = ot.ExponentialModel(scale, amplitude)
myXproc = ot.GaussianProcess(myCovModel, myMesh)
g = ot.SymbolicFunction(['x1'], ['exp(x1)'])
myDynTransform = ot.ValueFunction(g, myMesh)
myXtProcess = ot.CompositeProcess(myDynTransform, myXproc)
[3]:
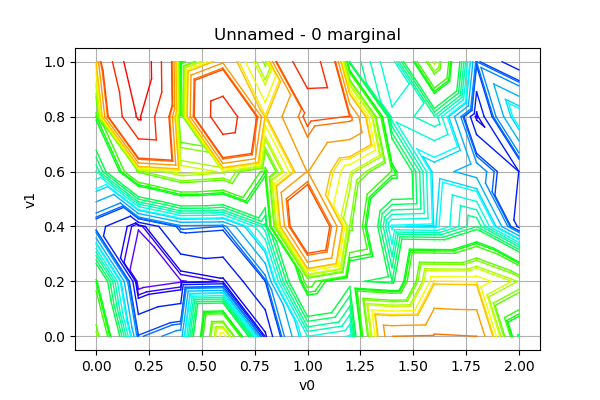
# Draw a field
field = myXtProcess.getRealization()
field.drawMarginal(0)
[3]:
[4]:
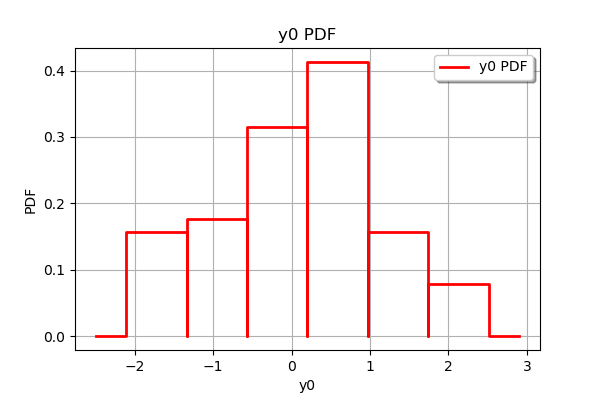
# Draw values
marginal = ot.HistogramFactory().build(field.getValues())
marginal.drawPDF()
[4]:
[5]:
# Build the transformed field through Box-Cox
myModelTransform = ot.BoxCoxFactory().build(field)
myStabilizedField = myModelTransform(field)
[6]:
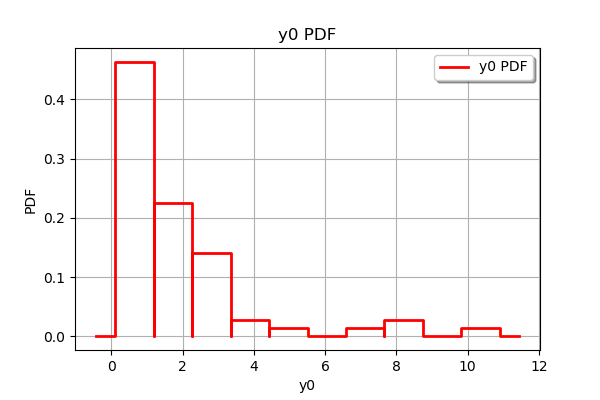
# Draw values
marginal = ot.HistogramFactory().build(myStabilizedField.getValues())
marginal.drawPDF()
[6]: