Note
Click here to download the full example code
Optimization using NLopt¶
In this example we are going to explore optimization using OpenTURNS’ NLopt interface.
from __future__ import print_function
import openturns as ot
import openturns.viewer as viewer
from matplotlib import pylab as plt
import math as m
ot.Log.Show(ot.Log.NONE)
List available algorithms
for algo in ot.NLopt.GetAlgorithmNames():
print(algo)
Out:
AUGLAG
AUGLAG_EQ
GD_MLSL
GD_MLSL_LDS
GN_CRS2_LM
GN_DIRECT
GN_DIRECT_L
GN_DIRECT_L_NOSCAL
GN_DIRECT_L_RAND
GN_DIRECT_L_RAND_NOSCAL
GN_DIRECT_NOSCAL
GN_ESCH
GN_ISRES
GN_MLSL
GN_MLSL_LDS
GN_ORIG_DIRECT
GN_ORIG_DIRECT_L
G_MLSL
G_MLSL_LDS
LD_AUGLAG
LD_AUGLAG_EQ
LD_CCSAQ
LD_LBFGS
LD_MMA
LD_SLSQP
LD_TNEWTON
LD_TNEWTON_PRECOND
LD_TNEWTON_PRECOND_RESTART
LD_TNEWTON_RESTART
LD_VAR1
LD_VAR2
LN_AUGLAG
LN_AUGLAG_EQ
LN_BOBYQA
LN_COBYLA
LN_NELDERMEAD
LN_NEWUOA
LN_NEWUOA_BOUND
LN_PRAXIS
LN_SBPLX
More details on NLopt algorithms are available here .
The optimization algorithm is instanciated from the NLopt name
algo = ot.NLopt('LD_SLSQP')
define the problem
objective = ot.SymbolicFunction(['x1', 'x2'], ['100*(x2-x1^2)^2+(1-x1)^2'])
inequality_constraint = ot.SymbolicFunction(['x1', 'x2'], ['x1-2*x2'])
dim = objective.getInputDimension()
bounds = ot.Interval([-3.] * dim, [5.] * dim)
problem = ot.OptimizationProblem(objective)
problem.setMinimization(True)
problem.setInequalityConstraint(inequality_constraint)
problem.setBounds(bounds)
solve the problem
algo.setProblem(problem)
startingPoint = [0.0] * dim
algo.setStartingPoint(startingPoint)
algo.run()
retrieve results
result = algo.getResult()
print('x^=', result.getOptimalPoint())
Out:
x^= [0.517441,0.258721]
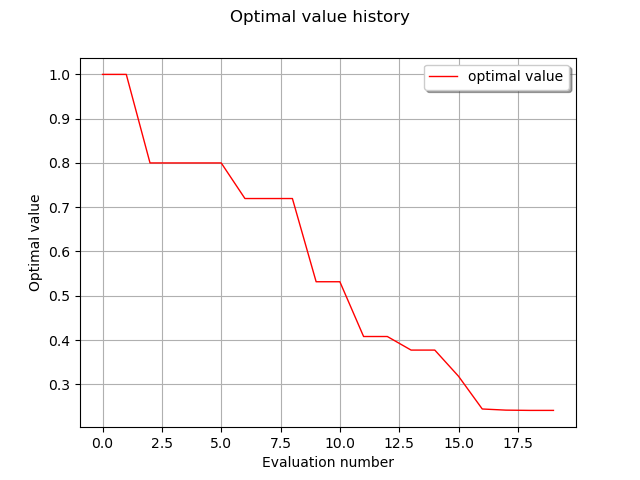
draw optimal value history
graph = result.drawOptimalValueHistory()
view = viewer.View(graph)
plt.show()
Total running time of the script: ( 0 minutes 0.118 seconds)