Note
Click here to download the full example code
Create a threshold event¶
Abstract¶
We present in this example the creation and the use of a ThresholdEvent to estimate a simple integral.
import openturns as ot
import openturns.viewer as otv
from matplotlib import pylab as plt
We consider a standard Gaussian random vector  and build a random vector from this distribution.
and build a random vector from this distribution.
distX = ot.Normal()
vecX = ot.RandomVector(distX)
We consider the simple model  and consider the output random variable
and consider the output random variable  .
.
f = ot.SymbolicFunction(['x1'], ['abs(x1)'])
vecY = ot.CompositeRandomVector(f, vecX)
We define a very simple ThresholdEvent which happpens whenever  :
:
thresholdEvent = ot.ThresholdEvent(vecY, ot.Less(), 1.0)
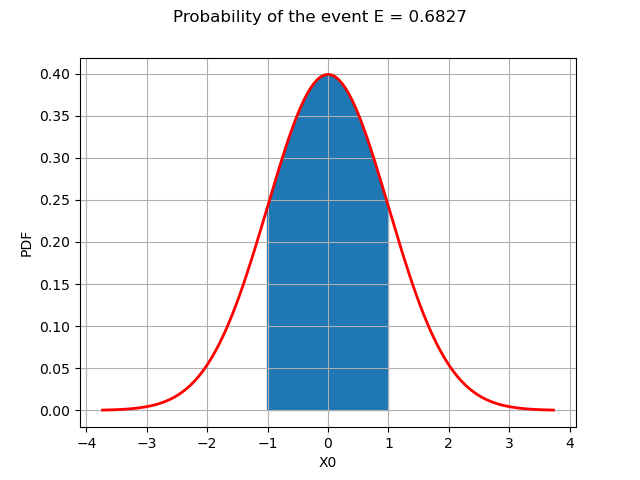
For the normal distribution, it is a well-known fact that the values lower than one standard deviation (here exactly 1) away from the mean (here 0) account roughly for 68.27% of the set. So the probability of the event is
print("Probability of the event : %.4f"%0.6827)
Out:
Probability of the event : 0.6827
We can also use a basic estimator to get the probability of the event by drawing samples from the initial distribution distX and counting those which realize the event :
print("Probability of the event (event sampling) : %.4f"%thresholdEvent.getSample(1000).computeMean()[0])
Out:
Probability of the event (event sampling) : 0.6950
The geometric interpretation is simply the area under the PDF of the standard normal distribution for ![x \in [-1,1]](../../_images/math/ae6615578b85875c90929e3f3aa31b4a42dd7b70.svg) which we draw thereafter.
which we draw thereafter.
def linearSample(xmin,xmax,npoints):
"""
Returns a sample created from a regular grid
from xmin to xmax with npoints points.
"""
step = (xmax-xmin)/(npoints-1)
rg = ot.RegularGrid(xmin, step, npoints)
vertices = rg.getVertices()
return vertices
The boundary of the event are the lines  and
and 
a, b = -1, 1
nplot = 100 # Number of points in the plot
x = linearSample(a,b,nplot)
y = distX.computePDF(x)
def drawInTheBounds(vLow,vUp,n_test):
"""
Draw the area within the bounds.
"""
palette = ot.Drawable.BuildDefaultPalette(2)
myPaletteColor = palette[0]
polyData = [[vLow[i], vLow[i+1], vUp[i+1], vUp[i]] for i in range(n_test-1)]
polygonList = [ot.Polygon(polyData[i], myPaletteColor, myPaletteColor) for i in range(n_test-1)]
boundsPoly = ot.PolygonArray(polygonList)
return boundsPoly
vLow = [[x[i,0],0.] for i in range(nplot)]
vUp = [[x[i,0],y[i,0]] for i in range(nplot)]
area = distX.computeCDF(b) - distX.computeCDF(a)
boundsPoly = drawInTheBounds(vLow,vUp,nplot)
We add the colored area to the PDF graph.
graph = distX.drawPDF()
graph.add(boundsPoly)
graph.setTitle("Probability of the event E = %.4f" % (area))
graph.setLegends([""])
view = otv.View(graph)
Display all figures
plt.show()
Total running time of the script: ( 0 minutes 0.144 seconds)