CalibrationResult¶
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
- class CalibrationResult(*args)¶
Calibration result.
Returned by calibration algorithms, see
CalibrationAlgorithm.- Parameters
- parameterPrior
Distribution The prior distribution of the parameter.
- parameterPosterior
Distribution The posterior distribution of the parameter.
- parameterMapsequence of float
The maximum a posteriori estimate of the parameter.
- observationsError
Distribution The distribution of the observations error.
- inputObservations
Sample The sample of input observations.
- outputObservations
Sample The sample of output observations.
- residualFunction
Function The residual function.
- parameterPrior
Notes
The residual function returns model(inputObservations) - outputObservations.
Examples
>>> import openturns as ot
# assume we obtained a result from CalibrationAlgorithm
>>> result = ot.CalibrationResult() >>> pmap = result.getParameterMAP() >>> prior = result.getParameterPrior() >>> posterior = result.getParameterPosterior() >>> graph1 = result.drawParameterDistributions() >>> graph2 = result.drawResiduals() >>> graph3 = result.drawObservationsVsInputs() >>> graph4 = result.drawObservationsVsPredictions()
Methods
Draw observations/inputs.
Draw observations/predictions.
Draw parameter prior/posterior.
Draw residuals.
Accessor to the object’s name.
getId()Accessor to the object’s id.
Accessor to the input observations.
getName()Accessor to the object’s name.
Accessor to the observations error distribution.
Accessor to the output observations.
Accessor to the output observations.
Accessor to the output observations.
Accessor to the maximum a posteriori parameter estimate.
Accessor to the parameter posterior distribution.
Accessor to the parameter prior distribution.
Accessor to the residual function.
Accessor to the object’s shadowed id.
Accessor to the object’s visibility state.
hasName()Test if the object is named.
Test if the object has a distinguishable name.
setInputObservations(inputObservations)Accessor to the input observations.
setName(name)Accessor to the object’s name.
setObservationsError(observationsError)Accessor to the observations error distribution.
Accessor to the output at prior/posterior mean.
setOutputObservations(outputObservations)Accessor to the output observations.
setParameterMAP(parameterMAP)Accessor to the maximum a posteriori parameter estimate.
setParameterPosterior(parameterPosterior)Accessor to the parameter posterior distribution.
setParameterPrior(parameterPrior)Accessor to the parameter prior distribution.
setResidualFunction(residualFunction)Accessor to the residual function.
setShadowedId(id)Accessor to the object’s shadowed id.
setVisibility(visible)Accessor to the object’s visibility state.
- __init__(*args)¶
Initialize self. See help(type(self)) for accurate signature.
- drawObservationsVsInputs()¶
Draw observations/inputs.
Plot the observed output of the model depending on the observed input before and after calibration.
- Returns
- graph
Graph Graph.
- graph
Examples
>>> import openturns as ot >>> result = ot.CalibrationResult()
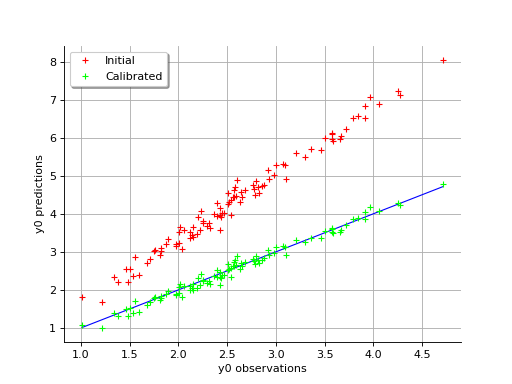
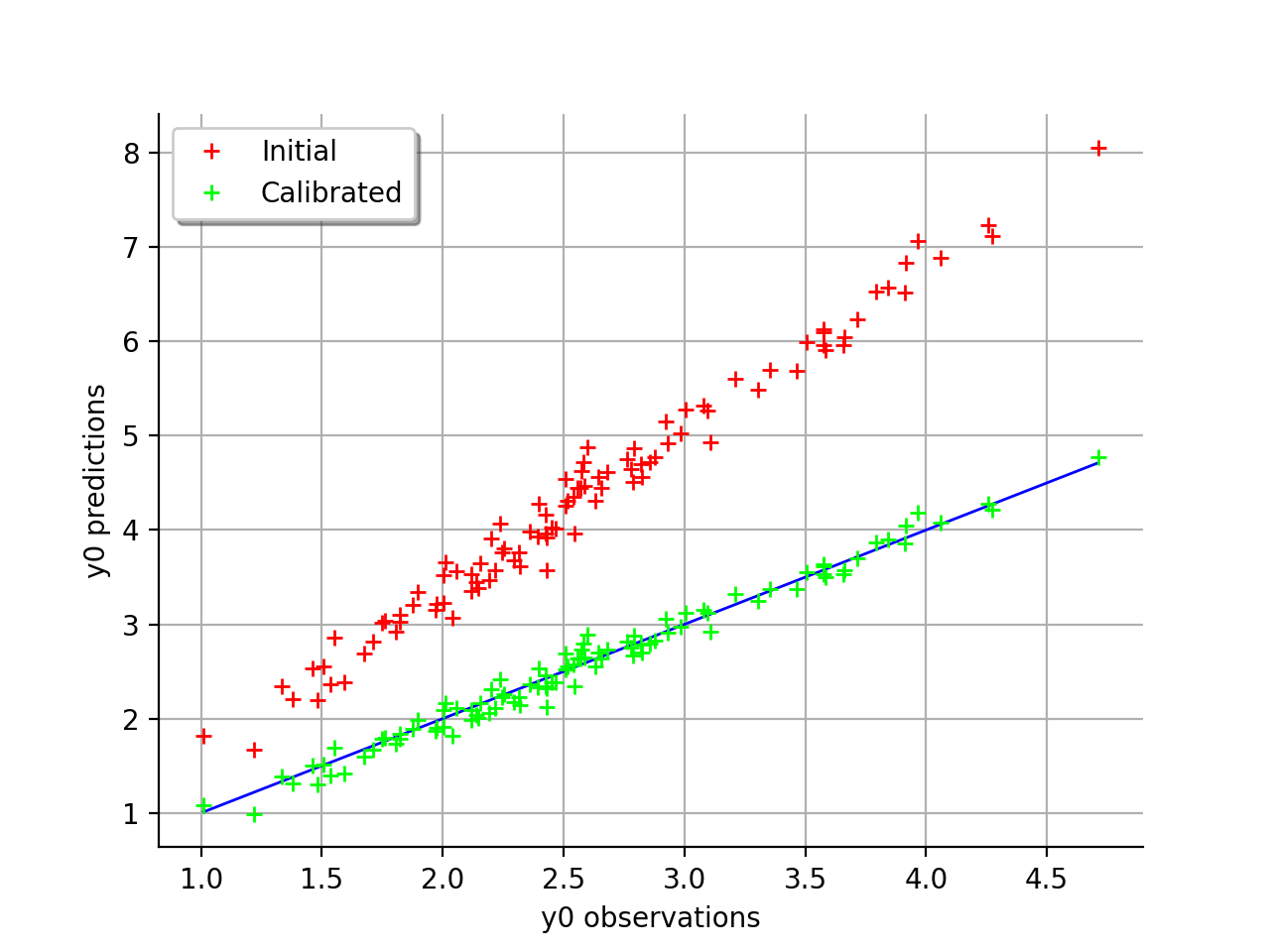
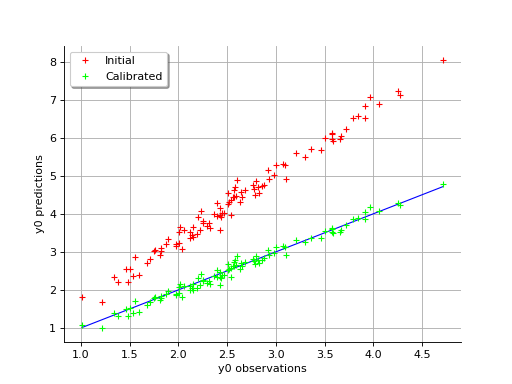
- drawObservationsVsPredictions()¶
Draw observations/predictions.
Plots the output of the model depending on the output observations before and after calibration.
- Returns
- graph
Graph Graph.
- graph
Examples
>>> import openturns as ot >>> result = ot.CalibrationResult()
- drawParameterDistributions()¶
Draw parameter prior/posterior.
Plots the prior and posterior distribution of the calibrated parameter theta.
- Returns
- graph
Graph Graph.
- graph
Examples
>>> import openturns as ot >>> result = ot.CalibrationResult()
- drawResiduals()¶
Draw residuals.
Plot the distribution of the residuals and the distribution of the observation errors.
- Returns
- graph
Graph Graph.
- graph
Examples
>>> import openturns as ot >>> result = ot.CalibrationResult()
- getClassName()¶
Accessor to the object’s name.
- Returns
- class_namestr
The object class name (object.__class__.__name__).
- getId()¶
Accessor to the object’s id.
- Returns
- idint
Internal unique identifier.
- getInputObservations()¶
Accessor to the input observations.
- Returns
- inputObservations
Sample The sample of input observations.
- inputObservations
- getName()¶
Accessor to the object’s name.
- Returns
- namestr
The name of the object.
- getObservationsError()¶
Accessor to the observations error distribution.
- Returns
- observationsError
Distribution The observations error distribution.
- observationsError
- getOutputAtPosteriorMean()¶
Accessor to the output observations.
- Returns
- outputAtPosterior
Sample Output at posterior mean.
- outputAtPosterior
- getOutputAtPriorMean()¶
Accessor to the output observations.
- Returns
- outputAtPrior
Sample Output at prior mean.
- outputAtPrior
- getOutputObservations()¶
Accessor to the output observations.
- Returns
- outputObservations
Sample The sample of output observations.
- outputObservations
- getParameterMAP()¶
Accessor to the maximum a posteriori parameter estimate.
- Returns
- parameterPosterior
Point The maximum a posteriori parameter estimate.
- parameterPosterior
- getParameterPosterior()¶
Accessor to the parameter posterior distribution.
- Returns
- parameterPosterior
Distribution The posterior distribution of the parameter.
- parameterPosterior
- getParameterPrior()¶
Accessor to the parameter prior distribution.
- Returns
- parameterPrior
Distribution The prior distribution of the parameter.
- parameterPrior
- getResidualFunction()¶
Accessor to the residual function.
- Returns
- residualFunction
Function The residual function.
- residualFunction
- getShadowedId()¶
Accessor to the object’s shadowed id.
- Returns
- idint
Internal unique identifier.
- getVisibility()¶
Accessor to the object’s visibility state.
- Returns
- visiblebool
Visibility flag.
- hasName()¶
Test if the object is named.
- Returns
- hasNamebool
True if the name is not empty.
- hasVisibleName()¶
Test if the object has a distinguishable name.
- Returns
- hasVisibleNamebool
True if the name is not empty and not the default one.
- setInputObservations(inputObservations)¶
Accessor to the input observations.
- Parameters
- inputObservations
Sample The sample of input observations.
- inputObservations
- setName(name)¶
Accessor to the object’s name.
- Parameters
- namestr
The name of the object.
- setObservationsError(observationsError)¶
Accessor to the observations error distribution.
- Parameters
- observationsError
Distribution The observations error distribution.
- observationsError
- setOutputAtPriorAndPosteriorMean(outputAtPriorMean, outputAtPosteriorMean)¶
Accessor to the output at prior/posterior mean.
- setOutputObservations(outputObservations)¶
Accessor to the output observations.
- Parameters
- outputObservations
Sample The sample of output observations.
- outputObservations
- setParameterMAP(parameterMAP)¶
Accessor to the maximum a posteriori parameter estimate.
- Parameters
- parameterPosteriorsequence of float
The maximum a posteriori parameter estimate.
- setParameterPosterior(parameterPosterior)¶
Accessor to the parameter posterior distribution.
- Parameters
- parameterPosterior:
Distribution The posterior distribution of the parameter.
- parameterPosterior:
- setParameterPrior(parameterPrior)¶
Accessor to the parameter prior distribution.
- Parameters
- parameterPrior:
Distribution The prior distribution of the parameter.
- parameterPrior:
- setResidualFunction(residualFunction)¶
Accessor to the residual function.
- Parameters
- residualFunction
Function The residual function.
- residualFunction
- setShadowedId(id)¶
Accessor to the object’s shadowed id.
- Parameters
- idint
Internal unique identifier.
- setVisibility(visible)¶
Accessor to the object’s visibility state.
- Parameters
- visiblebool
Visibility flag.