Note
Go to the end to download the full example code
Estimate a non stationary covariance function¶
The objective of this use case is to estimate  from several
fields generated by the process
from several
fields generated by the process  . We suppose that the process
is not stationary.
. We suppose that the process
is not stationary.
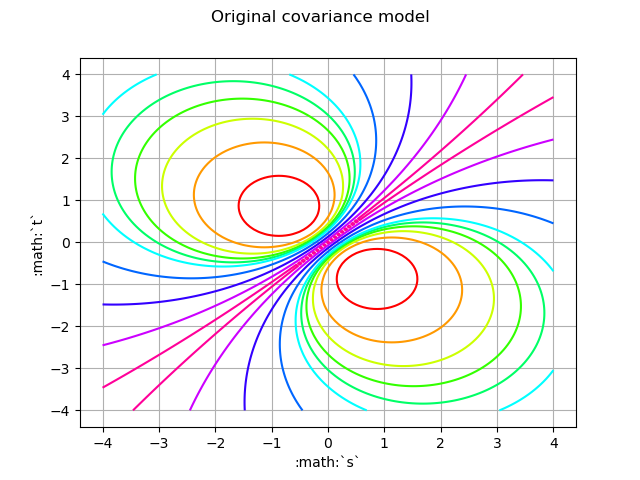
In the following example, we illustrate the estimation of the non stationary covariance model
![C : \mathcal{D} \times [-4, 4] \rightarrow \mathbb{R}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDIuMTMuMyAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPScxMDMuMjc2MTE3cHQnIGhlaWdodD0nMTEuOTU1MTY4cHQnIHZpZXdCb3g9JzAgLTguOTY2Mzc2IDEwMy4yNzYxMTcgMTEuOTU1MTY4Jz4KPGRlZnM+CjxwYXRoIGlkPSdnMS0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2cxLTInIGQ9J000LjY1MDU2LTMuMzIzNTM3TDIuMjU5NTI3LTUuNzAyNjE1QzIuMTE2MDY1LTUuODQ2MDc3IDIuMDkyMTU0LTUuODY5OTg4IDEuOTk2NTEzLTUuODY5OTg4QzEuODc2OTYxLTUuODY5OTg4IDEuNzU3NDEtNS43NjIzOTEgMS43NTc0MS01LjYzMDg4NEMxLjc1NzQxLTUuNTQ3MTk4IDEuNzgxMzItNS41MjMyODggMS45MTI4MjctNS4zOTE3ODFMNC4zMDM4NjEtMi45ODg3OTJMMS45MTI4MjctLjU4NTgwM0MxLjc4MTMyLS40NTQyOTYgMS43NTc0MS0uNDMwMzg2IDEuNzU3NDEtLjM0NjdDMS43NTc0MS0uMjE1MTkzIDEuODc2OTYxLS4xMDc1OTcgMS45OTY1MTMtLjEwNzU5N0MyLjA5MjE1NC0uMTA3NTk3IDIuMTE2MDY1LS4xMzE1MDcgMi4yNTk1MjctLjI3NDk2OUw0LjYzODYwNS0yLjY1NDA0N0w3LjExMzMyNS0uMTc5MzI4QzcuMTM3MjM1LS4xNjczNzIgNy4yMjA5MjItLjEwNzU5NyA3LjI5MjY1My0uMTA3NTk3QzcuNDM2MTE1LS4xMDc1OTcgNy41MzE3NTYtLjIxNTE5MyA3LjUzMTc1Ni0uMzQ2N0M3LjUzMTc1Ni0uMzcwNjEgNy41MzE3NTYtLjQxODQzMSA3LjQ5NTg5LS40NzgyMDdDNy40ODM5MzUtLjUwMjExNyA1LjU4MzA2NC0yLjM3OTA3OCA0Ljk4NTMwNS0yLjk4ODc5Mkw3LjE3MzEwMS01LjE3NjU4OEM3LjIzMjg3Ny01LjI0ODMxOSA3LjQxMjIwNC01LjQwMzczNiA3LjQ3MTk4LTUuNDc1NDY3QzcuNDgzOTM1LTUuNDk5Mzc3IDcuNTMxNzU2LTUuNTQ3MTk4IDcuNTMxNzU2LTUuNjMwODg0QzcuNTMxNzU2LTUuNzYyMzkxIDcuNDM2MTE1LTUuODY5OTg4IDcuMjkyNjUzLTUuODY5OTg4QzcuMTk3MDExLTUuODY5OTg4IDcuMTQ5MTkxLTUuODIyMTY3IDcuMDE3Njg0LTUuNjkwNjZMNC42NTA1Ni0zLjMyMzUzN1onLz4KPHBhdGggaWQ9J2cxLTMzJyBkPSdNOS45NzA2MS0yLjc0OTY4OUM5LjMxMzA3Ni0yLjI0NzU3MiA4Ljk5MDI4Ni0xLjc1NzQxIDguODk0NjQ1LTEuNjAxOTkzQzguMzU2NjYzLS43NzcwODYgOC4yNjEwMjEtLjAyMzkxIDguMjYxMDIxLS4wMTE5NTVDOC4yNjEwMjEgLjEzMTUwNyA4LjQwNDQ4MyAuMTMxNTA3IDguNTAwMTI1IC4xMzE1MDdDOC43MDMzNjIgLjEzMTUwNyA4LjcxNTMxOCAuMTA3NTk3IDguNzYzMTM4LS4xMDc1OTdDOS4wMzgxMDctMS4yNzkyMDMgOS43NDM0NjItMi4yODM0MzcgMTEuMDk0Mzk2LTIuODMzMzc1QzExLjIzNzg1OC0yLjg4MTE5NiAxMS4yNzM3MjQtMi45MDUxMDYgMTEuMjczNzI0LTIuOTg4NzkyUzExLjIwMTk5My0zLjEwODM0NCAxMS4xNzgwODItMy4xMjAyOTlDMTAuNjUyMDU1LTMuMzIzNTM3IDkuMjA1NDc5LTMuOTIxMjk1IDguNzUxMTgzLTUuOTI5NzYzQzguNzE1MzE4LTYuMDczMjI1IDguNzAzMzYyLTYuMTA5MDkxIDguNTAwMTI1LTYuMTA5MDkxQzguNDA0NDgzLTYuMTA5MDkxIDguMjYxMDIxLTYuMTA5MDkxIDguMjYxMDIxLTUuOTY1NjI5QzguMjYxMDIxLTUuOTQxNzE5IDguMzY4NjE4LTUuMTg4NTQzIDguODcwNzM1LTQuMzg3NTQ3QzkuMTA5ODM4LTQuMDI4ODkyIDkuNDU2NTM4LTMuNjEwNDYxIDkuOTcwNjEtMy4yMjc4OTVIMS4wODc5MkMuODcyNzI3LTMuMjI3ODk1IC42NTc1MzQtMy4yMjc4OTUgLjY1NzUzNC0yLjk4ODc5MlMuODcyNzI3LTIuNzQ5Njg5IDEuMDg3OTItMi43NDk2ODlIOS45NzA2MVonLz4KPHBhdGggaWQ9J2cxLTY4JyBkPSdNMi40Mzg4NTQgMEM1LjIyNDQwOCAwIDkuMTU3NjU5LTIuMTI4MDIgOS4xNTc2NTktNS4zOTE3ODFDOS4xNTc2NTktNi40NTU3OTEgOC42NTU1NDItNy4xMjUyOCA4LjA2OTczOC03LjQ5NTg5QzcuMDQxNTk0LTguMTY1MzggNS45NDE3MTktOC4xNjUzOCA0LjgwNTk3OC04LjE2NTM4QzMuNzc3ODMzLTguMTY1MzggMy4wNzI0NzgtOC4xNjUzOCAyLjA2ODI0NC03LjczNDk5NEMuNDc4MjA3LTcuMDI5NjM5IC4yNTEwNTktNi4wMzczNiAuMjUxMDU5LTUuOTQxNzE5Qy4yNTEwNTktNS44Njk5ODggLjI5ODg3OS01Ljg0NjA3NyAuMzcwNjEtNS44NDYwNzdDLjU2MTg5My01Ljg0NjA3NyAuODM2ODYyLTYuMDEzNDUgLjkzMjUwMy02LjA3MzIyNUMxLjE4MzU2Mi02LjI0MDU5OCAxLjIxOTQyNy02LjMxMjMyOSAxLjI5MTE1OC02LjUzOTQ3N0MxLjQ1ODUzMS03LjAxNzY4NCAxLjc5MzI3NS03LjQzNjExNSAzLjI5OTYyNi03LjUwNzg0NkMzLjEwODM0NC01LjAwOTIxNSAyLjQ5ODYzLTIuNzI1Nzc4IDEuNjYxNzY4LS42MzM2MjRDMS4yMTk0MjctLjQ3ODIwNyAuOTMyNTAzLS4yMDMyMzggLjkzMjUwMy0uMDgzNjg2Qy45MzI1MDMtLjAxMTk1NSAuOTQ0NDU4IDAgMS4yMDc0NzIgMEgyLjQzODg1NFpNMi40OTg2My0uNjU3NTM0QzMuODYxNTE5LTMuOTkzMDI2IDQuMTEyNTc4LTYuMDczMjI1IDQuMjc5OTUtNy41MDc4NDZDNS4wODA5NDYtNy41MDc4NDYgOC4xNDE0NjktNy41MDc4NDYgOC4xNDE0NjktNC44Nzc3MDlDOC4xNDE0NjktMi41MzQ0OTYgNi4wMzczNi0uNjU3NTM0IDMuMTQ0MjA5LS42NTc1MzRIMi40OTg2M1onLz4KPHBhdGggaWQ9J2czLTUyJyBkPSdNNC4zMTU4MTYtNy43ODI4MTRDNC4zMTU4MTYtOC4wMDk5NjMgNC4zMTU4MTYtOC4wNjk3MzggNC4xNDg0NDMtOC4wNjk3MzhDNC4wNTI4MDItOC4wNjk3MzggNC4wMTY5MzYtOC4wNjk3MzggMy45MjEyOTUtNy45MjYyNzZMLjMyMjc5LTIuMzQzMjEzVi0xLjk5NjUxM0gzLjQ2Njk5OVYtLjkwODU5M0MzLjQ2Njk5OS0uNDY2MjUyIDMuNDQzMDg4LS4zNDY3IDIuNTcwMzYxLS4zNDY3SDIuMzMxMjU4VjBDMi42MDYyMjctLjAyMzkxIDMuNTUwNjg1LS4wMjM5MSAzLjg4NTQzLS4wMjM5MVM1LjE3NjU4OC0uMDIzOTEgNS40NTE1NTcgMFYtLjM0NjdINS4yMTI0NTNDNC4zNTE2ODEtLjM0NjcgNC4zMTU4MTYtLjQ2NjI1MiA0LjMxNTgxNi0uOTA4NTkzVi0xLjk5NjUxM0g1LjUyMzI4OFYtMi4zNDMyMTNINC4zMTU4MTZWLTcuNzgyODE0Wk0zLjUyNjc3NS02Ljg1MDMxMVYtMi4zNDMyMTNILjYyMTY2OUwzLjUyNjc3NS02Ljg1MDMxMVonLz4KPHBhdGggaWQ9J2czLTU4JyBkPSdNMi4xOTk3NTEtNC41Nzg4MjlDMi4xOTk3NTEtNC45MDE2MTkgMS45MjQ3ODItNS4xNTI2NzcgMS42MjU5MDMtNS4xNTI2NzdDMS4yNzkyMDMtNS4xNTI2NzcgMS4wNDAxLTQuODc3NzA5IDEuMDQwMS00LjU3ODgyOUMxLjA0MDEtNC4yMjAxNzQgMS4zMzg5NzktMy45OTMwMjYgMS42MTM5NDgtMy45OTMwMjZDMS45MzY3MzctMy45OTMwMjYgMi4xOTk3NTEtNC4yNDQwODUgMi4xOTk3NTEtNC41Nzg4MjlaTTIuMTk5NzUxLS41ODU4MDNDMi4xOTk3NTEtLjkwODU5MyAxLjkyNDc4Mi0xLjE1OTY1MSAxLjYyNTkwMy0xLjE1OTY1MUMxLjI3OTIwMy0xLjE1OTY1MSAxLjA0MDEtLjg4NDY4MiAxLjA0MDEtLjU4NTgwM0MxLjA0MDEtLjIyNzE0OCAxLjMzODk3OSAwIDEuNjEzOTQ4IDBDMS45MzY3MzcgMCAyLjE5OTc1MS0uMjUxMDU5IDIuMTk5NzUxLS41ODU4MDNaJy8+CjxwYXRoIGlkPSdnMy05MScgZD0nTTIuOTg4NzkyIDIuOTg4NzkyVjIuNTQ2NDUxSDEuODI5MTQxVi04LjUyNDAzNUgyLjk4ODc5MlYtOC45NjYzNzZIMS4zODY4VjIuOTg4NzkySDIuOTg4NzkyWicvPgo8cGF0aCBpZD0nZzMtOTMnIGQ9J00xLjg1MzA1MS04Ljk2NjM3NkguMjUxMDU5Vi04LjUyNDAzNUgxLjQxMDcxVjIuNTQ2NDUxSC4yNTEwNTlWMi45ODg3OTJIMS44NTMwNTFWLTguOTY2Mzc2WicvPgo8cGF0aCBpZD0nZzAtODInIGQ9J00zLjIwMzk4NS0zLjc1MzkyM0gzLjYzNDM3MUw1LjQyNzY0Ni0uOTgwMzI0QzUuNTQ3MTk4LS43ODkwNDEgNS44MzQxMjItLjMyMjc5IDUuOTY1NjI5LS4xNDM0NjJDNi4wNDkzMTUgMCA2LjA4NTE4MSAwIDYuMzYwMTQ5IDBIOC4wMDk5NjNDOC4yMjUxNTYgMCA4LjQwNDQ4MyAwIDguNDA0NDgzLS4yMTUxOTNDOC40MDQ0ODMtLjMxMDgzNCA4LjMzMjc1Mi0uMzk0NTIxIDguMjI1MTU2LS40MTg0MzFDNy43ODI4MTQtLjUxNDA3MiA3LjE5NzAxMS0xLjMwMzExMyA2LjkxMDA4Ny0xLjY4NTY3OUM2LjgyNjQwMS0xLjgwNTIzIDYuMjI4NjQzLTIuNTk0MjcxIDUuNDI3NjQ2LTMuODg1NDNDNi40OTE2NTYtNC4wNzY3MTIgNy41MTk4MDEtNC41MzEwMDkgNy41MTk4MDEtNS45NTM2NzRDNy41MTk4MDEtNy42MTU0NDIgNS43NjIzOTEtOC4xODkyOSA0LjM1MTY4MS04LjE4OTI5SC41OTc3NThDLjM4MjU2NS04LjE4OTI5IC4xOTEyODMtOC4xODkyOSAuMTkxMjgzLTcuOTc0MDk3Qy4xOTEyODMtNy43NzA4NTkgLjQxODQzMS03Ljc3MDg1OSAuNTE0MDcyLTcuNzcwODU5QzEuMTk1NTE3LTcuNzcwODU5IDEuMjU1MjkzLTcuNjg3MTczIDEuMjU1MjkzLTcuMDg5NDE1Vi0xLjA5OTg3NUMxLjI1NTI5My0uNTAyMTE3IDEuMTk1NTE3LS40MTg0MzEgLjUxNDA3Mi0uNDE4NDMxQy40MTg0MzEtLjQxODQzMSAuMTkxMjgzLS40MTg0MzEgLjE5MTI4My0uMjE1MTkzQy4xOTEyODMgMCAuMzgyNTY1IDAgLjU5Nzc1OCAwSDMuODczNDc0QzQuMDg4NjY3IDAgNC4yNjc5OTUgMCA0LjI2Nzk5NS0uMjE1MTkzQzQuMjY3OTk1LS40MTg0MzEgNC4wNjQ3NTctLjQxODQzMSAzLjkzMzI1LS40MTg0MzFDMy4yNTE4MDYtLjQxODQzMSAzLjIwMzk4NS0uNTE0MDcyIDMuMjAzOTg1LTEuMDk5ODc1Vi0zLjc1MzkyM1pNNS41MTEzMzMtNC4zMzk3MjZDNS44NDYwNzctNC43ODIwNjcgNS44ODE5NDMtNS40MTU2OTEgNS44ODE5NDMtNS45NDE3MTlDNS44ODE5NDMtNi41MTU1NjcgNS44MTAyMTItNy4xNDkxOTEgNS40Mjc2NDYtNy42MzkzNTJDNS45MTc4MDgtNy41MzE3NTYgNy4xMDEzNy03LjE2MTE0NiA3LjEwMTM3LTUuOTUzNjc0QzcuMTAxMzctNS4xNzY1ODggNi43NDI3MTUtNC41NjY4NzQgNS41MTEzMzMtNC4zMzk3MjZaTTMuMjAzOTg1LTcuMTI1MjhDMy4yMDM5ODUtNy4zNzYzMzkgMy4yMDM5ODUtNy43NzA4NTkgMy45NDUyMDUtNy43NzA4NTlDNC45NjEzOTUtNy43NzA4NTkgNS40NjM1MTItNy4zNTI0MjggNS40NjM1MTItNS45NDE3MTlDNS40NjM1MTItNC4zOTk1MDIgNS4wOTI5MDItNC4xNzIzNTQgMy4yMDM5ODUtNC4xNzIzNTRWLTcuMTI1MjhaTTEuNTc4MDgyLS40MTg0MzFDMS42NzM3MjQtLjYzMzYyNCAxLjY3MzcyNC0uOTY4MzY5IDEuNjczNzI0LTEuMDc1OTY1Vi03LjExMzMyNUMxLjY3MzcyNC03LjIzMjg3NyAxLjY3MzcyNC03LjU1NTY2NiAxLjU3ODA4Mi03Ljc3MDg1OUgyLjk0MDk3MUMyLjc4NTU1NC03LjU3OTU3NyAyLjc4NTU1NC03LjM0MDQ3MyAyLjc4NTU1NC03LjE2MTE0NlYtMS4wNzU5NjVDMi43ODU1NTQtLjk1NjQxMyAyLjc4NTU1NC0uNjMzNjI0IDIuODgxMTk2LS40MTg0MzFIMS41NzgwODJaTTQuMTI0NTMzLTMuNzUzOTIzQzQuMjA4MjE5LTMuNzY1ODc4IDQuMjU2MDQtMy43Nzc4MzMgNC4zNTE2ODEtMy43Nzc4MzNDNC41MzEwMDktMy43Nzc4MzMgNC43OTQwMjItMy44MDE3NDMgNC45NzMzNS0zLjgyNTY1NEM1LjE1MjY3Ny0zLjUzODczIDYuNDQzODM2LTEuNDEwNzEgNy40MzYxMTUtLjQxODQzMUg2LjI3NjQ2M0w0LjEyNDUzMy0zLjc1MzkyM1onLz4KPHBhdGggaWQ9J2cyLTU5JyBkPSdNMi4zMzEyNTggLjA0NzgyMUMyLjMzMTI1OC0uNjQ1NTc5IDIuMTA0MTEtMS4xNTk2NTEgMS42MTM5NDgtMS4xNTk2NTFDMS4yMzEzODItMS4xNTk2NTEgMS4wNDAxLS44NDg4MTcgMS4wNDAxLS41ODU4MDNTMS4yMTk0MjcgMCAxLjYyNTkwMyAwQzEuNzgxMzIgMCAxLjkxMjgyNy0uMDQ3ODIxIDIuMDIwNDIzLS4xNTU0MTdDMi4wNDQzMzQtLjE3OTMyOCAyLjA1NjI4OS0uMTc5MzI4IDIuMDY4MjQ0LS4xNzkzMjhDMi4wOTIxNTQtLjE3OTMyOCAyLjA5MjE1NC0uMDExOTU1IDIuMDkyMTU0IC4wNDc4MjFDMi4wOTIxNTQgLjQ0MjM0MSAyLjAyMDQyMyAxLjIxOTQyNyAxLjMyNzAyNCAxLjk5NjUxM0MxLjE5NTUxNyAyLjEzOTk3NSAxLjE5NTUxNyAyLjE2Mzg4NSAxLjE5NTUxNyAyLjE4Nzc5NkMxLjE5NTUxNyAyLjI0NzU3MiAxLjI1NTI5MyAyLjMwNzM0NyAxLjMxNTA2OCAyLjMwNzM0N0MxLjQxMDcxIDIuMzA3MzQ3IDIuMzMxMjU4IDEuNDIyNjY1IDIuMzMxMjU4IC4wNDc4MjFaJy8+CjxwYXRoIGlkPSdnMi02NycgZD0nTTguOTMwNTExLTguMzA4ODQyQzguOTMwNTExLTguNDE2NDM4IDguODQ2ODI0LTguNDE2NDM4IDguODIyOTE0LTguNDE2NDM4UzguNzUxMTgzLTguNDE2NDM4IDguNjU1NTQyLTguMjk2ODg3TDcuODMwNjM1LTcuMjkyNjUzQzcuNDEyMjA0LTguMDA5OTYzIDYuNzU0NjctOC40MTY0MzggNS44NTgwMzItOC40MTY0MzhDMy4yNzU3MTYtOC40MTY0MzggLjU5Nzc1OC01Ljc5ODI1NyAuNTk3NzU4LTIuOTg4NzkyQy41OTc3NTgtLjk5MjI3OSAxLjk5NjUxMyAuMjUxMDU5IDMuNzQxOTY4IC4yNTEwNTlDNC42OTgzODEgLjI1MTA1OSA1LjUzNTI0My0uMTU1NDE3IDYuMjI4NjQzLS43NDEyMkM3LjI2ODc0Mi0xLjYxMzk0OCA3LjU3OTU3Ny0yLjc3MzU5OSA3LjU3OTU3Ny0yLjg2OTI0QzcuNTc5NTc3LTIuOTc2ODM3IDcuNDgzOTM1LTIuOTc2ODM3IDcuNDQ4MDctMi45NzY4MzdDNy4zNDA0NzMtMi45NzY4MzcgNy4zMjg1MTgtMi45MDUxMDYgNy4zMDQ2MDgtMi44NTcyODVDNi43NTQ2Ny0uOTkyMjc5IDUuMTQwNzIyLS4wOTU2NDEgMy45NDUyMDUtLjA5NTY0MUMyLjY3Nzk1OC0uMDk1NjQxIDEuNTc4MDgyLS45MDg1OTMgMS41NzgwODItMi42MDYyMjdDMS41NzgwODItMi45ODg3OTIgMS42OTc2MzQtNS4wNjg5OTEgMy4wNDg1NjgtNi42MzUxMThDMy43MDYxMDItNy40MDAyNDkgNC44Mjk4ODgtOC4wNjk3MzggNS45NjU2MjktOC4wNjk3MzhDNy4yODA2OTctOC4wNjk3MzggNy44NjY1MDEtNi45ODE4MTggNy44NjY1MDEtNS43NjIzOTFDNy44NjY1MDEtNS40NTE1NTcgNy44MzA2MzUtNS4xODg1NDMgNy44MzA2MzUtNS4xNDA3MjJDNy44MzA2MzUtNS4wMzMxMjYgNy45NTAxODctNS4wMzMxMjYgNy45ODYwNTItNS4wMzMxMjZDOC4xMTc1NTktNS4wMzMxMjYgOC4xMjk1MTQtNS4wNDUwODEgOC4xNzczMzUtNS4yNjAyNzRMOC45MzA1MTEtOC4zMDg4NDJaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PScwJyB5PScwJyB4bGluazpocmVmPScjZzItNjcnLz4KPHVzZSB4PScxMi41NTQ0NDEnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMy01OCcvPgo8dXNlIHg9JzE5LjEyNjkzMicgeT0nMCcgeGxpbms6aHJlZj0nI2cxLTY4Jy8+Cjx1c2UgeD0nMzEuMzM3ODI0JyB5PScwJyB4bGluazpocmVmPScjZzEtMicvPgo8dXNlIHg9JzQzLjI5Mjk4NScgeT0nMCcgeGxpbms6aHJlZj0nI2czLTkxJy8+Cjx1c2UgeD0nNDYuNTQ0NjQ2JyB5PScwJyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzU1Ljg0MzE0MycgeT0nMCcgeGxpbms6aHJlZj0nI2czLTUyJy8+Cjx1c2UgeD0nNjEuNjk2MTM0JyB5PScwJyB4bGluazpocmVmPScjZzItNTknLz4KPHVzZSB4PSc2Ni45NDAyOTInIHk9JzAnIHhsaW5rOmhyZWY9JyNnMy01MicvPgo8dXNlIHg9JzcyLjc5MzI4MycgeT0nMCcgeGxpbms6aHJlZj0nI2czLTkzJy8+Cjx1c2UgeD0nNzkuMzY1NzczJyB5PScwJyB4bGluazpocmVmPScjZzEtMzMnLz4KPHVzZSB4PSc5NC42NDE4MDUnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC04MicvPgo8L2c+Cjwvc3ZnPg==) defined by:
defined by:

The domain  is discretized on a mesh
is discretized on a mesh  which is a time grid with 64 points.
We build a normal process
which is a time grid with 64 points.
We build a normal process ![X: \Omega \times [-4, 4] \rightarrow \mathbb{R}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDIuMTMuMyAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPScxMDMuNTk3NzAzcHQnIGhlaWdodD0nMTEuOTU1MTY4cHQnIHZpZXdCb3g9JzAgLTguOTY2Mzc2IDEwMy41OTc3MDMgMTEuOTU1MTY4Jz4KPGRlZnM+CjxwYXRoIGlkPSdnMS0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2cxLTInIGQ9J000LjY1MDU2LTMuMzIzNTM3TDIuMjU5NTI3LTUuNzAyNjE1QzIuMTE2MDY1LTUuODQ2MDc3IDIuMDkyMTU0LTUuODY5OTg4IDEuOTk2NTEzLTUuODY5OTg4QzEuODc2OTYxLTUuODY5OTg4IDEuNzU3NDEtNS43NjIzOTEgMS43NTc0MS01LjYzMDg4NEMxLjc1NzQxLTUuNTQ3MTk4IDEuNzgxMzItNS41MjMyODggMS45MTI4MjctNS4zOTE3ODFMNC4zMDM4NjEtMi45ODg3OTJMMS45MTI4MjctLjU4NTgwM0MxLjc4MTMyLS40NTQyOTYgMS43NTc0MS0uNDMwMzg2IDEuNzU3NDEtLjM0NjdDMS43NTc0MS0uMjE1MTkzIDEuODc2OTYxLS4xMDc1OTcgMS45OTY1MTMtLjEwNzU5N0MyLjA5MjE1NC0uMTA3NTk3IDIuMTE2MDY1LS4xMzE1MDcgMi4yNTk1MjctLjI3NDk2OUw0LjYzODYwNS0yLjY1NDA0N0w3LjExMzMyNS0uMTc5MzI4QzcuMTM3MjM1LS4xNjczNzIgNy4yMjA5MjItLjEwNzU5NyA3LjI5MjY1My0uMTA3NTk3QzcuNDM2MTE1LS4xMDc1OTcgNy41MzE3NTYtLjIxNTE5MyA3LjUzMTc1Ni0uMzQ2N0M3LjUzMTc1Ni0uMzcwNjEgNy41MzE3NTYtLjQxODQzMSA3LjQ5NTg5LS40NzgyMDdDNy40ODM5MzUtLjUwMjExNyA1LjU4MzA2NC0yLjM3OTA3OCA0Ljk4NTMwNS0yLjk4ODc5Mkw3LjE3MzEwMS01LjE3NjU4OEM3LjIzMjg3Ny01LjI0ODMxOSA3LjQxMjIwNC01LjQwMzczNiA3LjQ3MTk4LTUuNDc1NDY3QzcuNDgzOTM1LTUuNDk5Mzc3IDcuNTMxNzU2LTUuNTQ3MTk4IDcuNTMxNzU2LTUuNjMwODg0QzcuNTMxNzU2LTUuNzYyMzkxIDcuNDM2MTE1LTUuODY5OTg4IDcuMjkyNjUzLTUuODY5OTg4QzcuMTk3MDExLTUuODY5OTg4IDcuMTQ5MTkxLTUuODIyMTY3IDcuMDE3Njg0LTUuNjkwNjZMNC42NTA1Ni0zLjMyMzUzN1onLz4KPHBhdGggaWQ9J2cxLTMzJyBkPSdNOS45NzA2MS0yLjc0OTY4OUM5LjMxMzA3Ni0yLjI0NzU3MiA4Ljk5MDI4Ni0xLjc1NzQxIDguODk0NjQ1LTEuNjAxOTkzQzguMzU2NjYzLS43NzcwODYgOC4yNjEwMjEtLjAyMzkxIDguMjYxMDIxLS4wMTE5NTVDOC4yNjEwMjEgLjEzMTUwNyA4LjQwNDQ4MyAuMTMxNTA3IDguNTAwMTI1IC4xMzE1MDdDOC43MDMzNjIgLjEzMTUwNyA4LjcxNTMxOCAuMTA3NTk3IDguNzYzMTM4LS4xMDc1OTdDOS4wMzgxMDctMS4yNzkyMDMgOS43NDM0NjItMi4yODM0MzcgMTEuMDk0Mzk2LTIuODMzMzc1QzExLjIzNzg1OC0yLjg4MTE5NiAxMS4yNzM3MjQtMi45MDUxMDYgMTEuMjczNzI0LTIuOTg4NzkyUzExLjIwMTk5My0zLjEwODM0NCAxMS4xNzgwODItMy4xMjAyOTlDMTAuNjUyMDU1LTMuMzIzNTM3IDkuMjA1NDc5LTMuOTIxMjk1IDguNzUxMTgzLTUuOTI5NzYzQzguNzE1MzE4LTYuMDczMjI1IDguNzAzMzYyLTYuMTA5MDkxIDguNTAwMTI1LTYuMTA5MDkxQzguNDA0NDgzLTYuMTA5MDkxIDguMjYxMDIxLTYuMTA5MDkxIDguMjYxMDIxLTUuOTY1NjI5QzguMjYxMDIxLTUuOTQxNzE5IDguMzY4NjE4LTUuMTg4NTQzIDguODcwNzM1LTQuMzg3NTQ3QzkuMTA5ODM4LTQuMDI4ODkyIDkuNDU2NTM4LTMuNjEwNDYxIDkuOTcwNjEtMy4yMjc4OTVIMS4wODc5MkMuODcyNzI3LTMuMjI3ODk1IC42NTc1MzQtMy4yMjc4OTUgLjY1NzUzNC0yLjk4ODc5MlMuODcyNzI3LTIuNzQ5Njg5IDEuMDg3OTItMi43NDk2ODlIOS45NzA2MVonLz4KPHBhdGggaWQ9J2czLTEwJyBkPSdNNy45MTQzMjEtMS44NjUwMDZINy42NTEzMDhDNy41OTE1MzItMS41NTQxNzIgNy41MzE3NTYtMS4yNDMzMzcgNy40MzYxMTUtLjk5MjI3OUM3LjM3NjMzOS0uODAwOTk2IDcuMzQwNDczLS43MDUzNTUgNi42NDcwNzMtLjcwNTM1NUg1LjcwMjYxNUM1Ljg0NjA3Ny0xLjM3NDg0NCA2LjE5Mjc3Ny0xLjk0ODY5MiA2LjY4MjkzOS0yLjY4OTkxM0M3LjI0NDgzMi0zLjU2MjY0IDcuNzk0NzctNC40MzUzNjcgNy43OTQ3Ny01LjQyNzY0NkM3Ljc5NDc3LTcuMDc3NDYgNi4yMTY2ODctOC40MTY0MzggNC4yMjAxNzQtOC40MTY0MzhDMi4yMTE3MDYtOC40MTY0MzggLjY0NTU3OS03LjA2NTUwNCAuNjQ1NTc5LTUuNDI3NjQ2Qy42NDU1NzktNC40NDczMjMgMS4xODM1NjItMy41ODY1NSAxLjc0NTQ1NS0yLjcxMzgyM0MyLjI0NzU3Mi0xLjkzNjczNyAyLjYwNjIyNy0xLjM3NDg0NCAyLjczNzczMy0uNzA1MzU1SDEuNzkzMjc1QzEuMDk5ODc1LS43MDUzNTUgMS4wNjQwMS0uODAwOTk2IDEuMDA0MjM0LS45ODAzMjRDLjkwODU5My0xLjIzMTM4MiAuODQ4ODE3LTEuNTc4MDgyIC43ODkwNDEtMS44NjUwMDZILjUyNjAyN0wuOTA4NTkzIDBIMi43NjE2NDRDMy4wMjQ2NTggMCAzLjA0ODU2OCAwIDMuMDQ4NTY4LS4yMTUxOTNDMy4wNDg1NjgtMS4wNjQwMSAyLjY2NjAwMi0yLjEwNDExIDIuNDI2ODk5LTIuNzEzODIzQzIuMDgwMTk5LTMuNjU4MjgxIDEuNzU3NDEtNC41MzEwMDkgMS43NTc0MS01LjQzOTYwMUMxLjc1NzQxLTcuMjgwNjk3IDMuMDM2NjEzLTguMTc3MzM1IDQuMjIwMTc0LTguMTc3MzM1UzYuNjgyOTM5LTcuMjgwNjk3IDYuNjgyOTM5LTUuNDM5NjAxQzYuNjgyOTM5LTQuNTMxMDA5IDYuMzQ4MTk0LTMuNjM0MzcxIDYuMDEzNDUtMi43NDk2ODlDNS44MTAyMTItMi4xNzU4NDEgNS4zOTE3ODEtMS4wNzU5NjUgNS4zOTE3ODEtLjIyNzE0OEM1LjM5MTc4MSAwIDUuNDI3NjQ2IDAgNS42OTA2NiAwSDcuNTMxNzU2TDcuOTE0MzIxLTEuODY1MDA2WicvPgo8cGF0aCBpZD0nZzMtNTInIGQ9J000LjMxNTgxNi03Ljc4MjgxNEM0LjMxNTgxNi04LjAwOTk2MyA0LjMxNTgxNi04LjA2OTczOCA0LjE0ODQ0My04LjA2OTczOEM0LjA1MjgwMi04LjA2OTczOCA0LjAxNjkzNi04LjA2OTczOCAzLjkyMTI5NS03LjkyNjI3NkwuMzIyNzktMi4zNDMyMTNWLTEuOTk2NTEzSDMuNDY2OTk5Vi0uOTA4NTkzQzMuNDY2OTk5LS40NjYyNTIgMy40NDMwODgtLjM0NjcgMi41NzAzNjEtLjM0NjdIMi4zMzEyNThWMEMyLjYwNjIyNy0uMDIzOTEgMy41NTA2ODUtLjAyMzkxIDMuODg1NDMtLjAyMzkxUzUuMTc2NTg4LS4wMjM5MSA1LjQ1MTU1NyAwVi0uMzQ2N0g1LjIxMjQ1M0M0LjM1MTY4MS0uMzQ2NyA0LjMxNTgxNi0uNDY2MjUyIDQuMzE1ODE2LS45MDg1OTNWLTEuOTk2NTEzSDUuNTIzMjg4Vi0yLjM0MzIxM0g0LjMxNTgxNlYtNy43ODI4MTRaTTMuNTI2Nzc1LTYuODUwMzExVi0yLjM0MzIxM0guNjIxNjY5TDMuNTI2Nzc1LTYuODUwMzExWicvPgo8cGF0aCBpZD0nZzMtNTgnIGQ9J00yLjE5OTc1MS00LjU3ODgyOUMyLjE5OTc1MS00LjkwMTYxOSAxLjkyNDc4Mi01LjE1MjY3NyAxLjYyNTkwMy01LjE1MjY3N0MxLjI3OTIwMy01LjE1MjY3NyAxLjA0MDEtNC44Nzc3MDkgMS4wNDAxLTQuNTc4ODI5QzEuMDQwMS00LjIyMDE3NCAxLjMzODk3OS0zLjk5MzAyNiAxLjYxMzk0OC0zLjk5MzAyNkMxLjkzNjczNy0zLjk5MzAyNiAyLjE5OTc1MS00LjI0NDA4NSAyLjE5OTc1MS00LjU3ODgyOVpNMi4xOTk3NTEtLjU4NTgwM0MyLjE5OTc1MS0uOTA4NTkzIDEuOTI0NzgyLTEuMTU5NjUxIDEuNjI1OTAzLTEuMTU5NjUxQzEuMjc5MjAzLTEuMTU5NjUxIDEuMDQwMS0uODg0NjgyIDEuMDQwMS0uNTg1ODAzQzEuMDQwMS0uMjI3MTQ4IDEuMzM4OTc5IDAgMS42MTM5NDggMEMxLjkzNjczNyAwIDIuMTk5NzUxLS4yNTEwNTkgMi4xOTk3NTEtLjU4NTgwM1onLz4KPHBhdGggaWQ9J2czLTkxJyBkPSdNMi45ODg3OTIgMi45ODg3OTJWMi41NDY0NTFIMS44MjkxNDFWLTguNTI0MDM1SDIuOTg4NzkyVi04Ljk2NjM3NkgxLjM4NjhWMi45ODg3OTJIMi45ODg3OTJaJy8+CjxwYXRoIGlkPSdnMy05MycgZD0nTTEuODUzMDUxLTguOTY2Mzc2SC4yNTEwNTlWLTguNTI0MDM1SDEuNDEwNzFWMi41NDY0NTFILjI1MTA1OVYyLjk4ODc5MkgxLjg1MzA1MVYtOC45NjYzNzZaJy8+CjxwYXRoIGlkPSdnMC04MicgZD0nTTMuMjAzOTg1LTMuNzUzOTIzSDMuNjM0MzcxTDUuNDI3NjQ2LS45ODAzMjRDNS41NDcxOTgtLjc4OTA0MSA1LjgzNDEyMi0uMzIyNzkgNS45NjU2MjktLjE0MzQ2MkM2LjA0OTMxNSAwIDYuMDg1MTgxIDAgNi4zNjAxNDkgMEg4LjAwOTk2M0M4LjIyNTE1NiAwIDguNDA0NDgzIDAgOC40MDQ0ODMtLjIxNTE5M0M4LjQwNDQ4My0uMzEwODM0IDguMzMyNzUyLS4zOTQ1MjEgOC4yMjUxNTYtLjQxODQzMUM3Ljc4MjgxNC0uNTE0MDcyIDcuMTk3MDExLTEuMzAzMTEzIDYuOTEwMDg3LTEuNjg1Njc5QzYuODI2NDAxLTEuODA1MjMgNi4yMjg2NDMtMi41OTQyNzEgNS40Mjc2NDYtMy44ODU0M0M2LjQ5MTY1Ni00LjA3NjcxMiA3LjUxOTgwMS00LjUzMTAwOSA3LjUxOTgwMS01Ljk1MzY3NEM3LjUxOTgwMS03LjYxNTQ0MiA1Ljc2MjM5MS04LjE4OTI5IDQuMzUxNjgxLTguMTg5MjlILjU5Nzc1OEMuMzgyNTY1LTguMTg5MjkgLjE5MTI4My04LjE4OTI5IC4xOTEyODMtNy45NzQwOTdDLjE5MTI4My03Ljc3MDg1OSAuNDE4NDMxLTcuNzcwODU5IC41MTQwNzItNy43NzA4NTlDMS4xOTU1MTctNy43NzA4NTkgMS4yNTUyOTMtNy42ODcxNzMgMS4yNTUyOTMtNy4wODk0MTVWLTEuMDk5ODc1QzEuMjU1MjkzLS41MDIxMTcgMS4xOTU1MTctLjQxODQzMSAuNTE0MDcyLS40MTg0MzFDLjQxODQzMS0uNDE4NDMxIC4xOTEyODMtLjQxODQzMSAuMTkxMjgzLS4yMTUxOTNDLjE5MTI4MyAwIC4zODI1NjUgMCAuNTk3NzU4IDBIMy44NzM0NzRDNC4wODg2NjcgMCA0LjI2Nzk5NSAwIDQuMjY3OTk1LS4yMTUxOTNDNC4yNjc5OTUtLjQxODQzMSA0LjA2NDc1Ny0uNDE4NDMxIDMuOTMzMjUtLjQxODQzMUMzLjI1MTgwNi0uNDE4NDMxIDMuMjAzOTg1LS41MTQwNzIgMy4yMDM5ODUtMS4wOTk4NzVWLTMuNzUzOTIzWk01LjUxMTMzMy00LjMzOTcyNkM1Ljg0NjA3Ny00Ljc4MjA2NyA1Ljg4MTk0My01LjQxNTY5MSA1Ljg4MTk0My01Ljk0MTcxOUM1Ljg4MTk0My02LjUxNTU2NyA1LjgxMDIxMi03LjE0OTE5MSA1LjQyNzY0Ni03LjYzOTM1MkM1LjkxNzgwOC03LjUzMTc1NiA3LjEwMTM3LTcuMTYxMTQ2IDcuMTAxMzctNS45NTM2NzRDNy4xMDEzNy01LjE3NjU4OCA2Ljc0MjcxNS00LjU2Njg3NCA1LjUxMTMzMy00LjMzOTcyNlpNMy4yMDM5ODUtNy4xMjUyOEMzLjIwMzk4NS03LjM3NjMzOSAzLjIwMzk4NS03Ljc3MDg1OSAzLjk0NTIwNS03Ljc3MDg1OUM0Ljk2MTM5NS03Ljc3MDg1OSA1LjQ2MzUxMi03LjM1MjQyOCA1LjQ2MzUxMi01Ljk0MTcxOUM1LjQ2MzUxMi00LjM5OTUwMiA1LjA5MjkwMi00LjE3MjM1NCAzLjIwMzk4NS00LjE3MjM1NFYtNy4xMjUyOFpNMS41NzgwODItLjQxODQzMUMxLjY3MzcyNC0uNjMzNjI0IDEuNjczNzI0LS45NjgzNjkgMS42NzM3MjQtMS4wNzU5NjVWLTcuMTEzMzI1QzEuNjczNzI0LTcuMjMyODc3IDEuNjczNzI0LTcuNTU1NjY2IDEuNTc4MDgyLTcuNzcwODU5SDIuOTQwOTcxQzIuNzg1NTU0LTcuNTc5NTc3IDIuNzg1NTU0LTcuMzQwNDczIDIuNzg1NTU0LTcuMTYxMTQ2Vi0xLjA3NTk2NUMyLjc4NTU1NC0uOTU2NDEzIDIuNzg1NTU0LS42MzM2MjQgMi44ODExOTYtLjQxODQzMUgxLjU3ODA4MlpNNC4xMjQ1MzMtMy43NTM5MjNDNC4yMDgyMTktMy43NjU4NzggNC4yNTYwNC0zLjc3NzgzMyA0LjM1MTY4MS0zLjc3NzgzM0M0LjUzMTAwOS0zLjc3NzgzMyA0Ljc5NDAyMi0zLjgwMTc0MyA0Ljk3MzM1LTMuODI1NjU0QzUuMTUyNjc3LTMuNTM4NzMgNi40NDM4MzYtMS40MTA3MSA3LjQzNjExNS0uNDE4NDMxSDYuMjc2NDYzTDQuMTI0NTMzLTMuNzUzOTIzWicvPgo8cGF0aCBpZD0nZzItNTknIGQ9J00yLjMzMTI1OCAuMDQ3ODIxQzIuMzMxMjU4LS42NDU1NzkgMi4xMDQxMS0xLjE1OTY1MSAxLjYxMzk0OC0xLjE1OTY1MUMxLjIzMTM4Mi0xLjE1OTY1MSAxLjA0MDEtLjg0ODgxNyAxLjA0MDEtLjU4NTgwM1MxLjIxOTQyNyAwIDEuNjI1OTAzIDBDMS43ODEzMiAwIDEuOTEyODI3LS4wNDc4MjEgMi4wMjA0MjMtLjE1NTQxN0MyLjA0NDMzNC0uMTc5MzI4IDIuMDU2Mjg5LS4xNzkzMjggMi4wNjgyNDQtLjE3OTMyOEMyLjA5MjE1NC0uMTc5MzI4IDIuMDkyMTU0LS4wMTE5NTUgMi4wOTIxNTQgLjA0NzgyMUMyLjA5MjE1NCAuNDQyMzQxIDIuMDIwNDIzIDEuMjE5NDI3IDEuMzI3MDI0IDEuOTk2NTEzQzEuMTk1NTE3IDIuMTM5OTc1IDEuMTk1NTE3IDIuMTYzODg1IDEuMTk1NTE3IDIuMTg3Nzk2QzEuMTk1NTE3IDIuMjQ3NTcyIDEuMjU1MjkzIDIuMzA3MzQ3IDEuMzE1MDY4IDIuMzA3MzQ3QzEuNDEwNzEgMi4zMDczNDcgMi4zMzEyNTggMS40MjI2NjUgMi4zMzEyNTggLjA0NzgyMVonLz4KPHBhdGggaWQ9J2cyLTg4JyBkPSdNNS42Nzg3MDUtNC44NTM3OThMNC41NTQ5MTktNy40NzE5OEM0LjcxMDMzNi03Ljc1ODkwNCA1LjA2ODk5MS03LjgwNjcyNSA1LjIxMjQ1My03LjgxODY4QzUuMjg0MTg0LTcuODE4NjggNS40MTU2OTEtNy44MzA2MzUgNS40MTU2OTEtOC4wMzM4NzNDNS40MTU2OTEtOC4xNjUzOCA1LjMwODA5NS04LjE2NTM4IDUuMjM2MzY0LTguMTY1MzhDNS4wMzMxMjYtOC4xNjUzOCA0Ljc5NDAyMi04LjE0MTQ2OSA0LjU5MDc4NS04LjE0MTQ2OUgzLjg5NzM4NUMzLjE2ODEyLTguMTQxNDY5IDIuNjQyMDkyLTguMTY1MzggMi42MzAxMzctOC4xNjUzOEMyLjUzNDQ5Ni04LjE2NTM4IDIuNDE0OTQ0LTguMTY1MzggMi40MTQ5NDQtNy45MzgyMzJDMi40MTQ5NDQtNy44MTg2OCAyLjUyMjU0LTcuODE4NjggMi42Nzc5NTgtNy44MTg2OEMzLjM3MTM1Ny03LjgxODY4IDMuNDE5MTc4LTcuNjk5MTI4IDMuNTM4NzMtNy40MTIyMDRMNC45NjEzOTUtNC4wODg2NjdMMi4zNjcxMjMtMS4zMTUwNjhDMS45MzY3MzctLjg0ODgxNyAxLjQyMjY2NS0uMzk0NTIxIC41Mzc5ODMtLjM0NjdDLjM5NDUyMS0uMzM0NzQ1IC4yOTg4NzktLjMzNDc0NSAuMjk4ODc5LS4xMTk1NTJDLjI5ODg3OS0uMDgzNjg2IC4zMTA4MzQgMCAuNDQyMzQxIDBDLjYwOTcxNCAwIC43ODkwNDEtLjAyMzkxIC45NTY0MTMtLjAyMzkxSDEuNTE4MzA2QzEuOTAwODcyLS4wMjM5MSAyLjMxOTMwMyAwIDIuNjg5OTEzIDBDMi43NzM1OTkgMCAyLjkxNzA2MSAwIDIuOTE3MDYxLS4yMTUxOTNDMi45MTcwNjEtLjMzNDc0NSAyLjgzMzM3NS0uMzQ2NyAyLjc2MTY0NC0uMzQ2N0MyLjUyMjU0LS4zNzA2MSAyLjM2NzEyMy0uNTAyMTE3IDIuMzY3MTIzLS42OTM0QzIuMzY3MTIzLS44OTY2MzggMi41MTA1ODUtMS4wNDAxIDIuODU3Mjg1LTEuMzk4NzU1TDMuOTIxMjk1LTIuNTU4NDA2QzQuMTg0MzA5LTIuODMzMzc1IDQuODE3OTMzLTMuNTI2Nzc1IDUuMDgwOTQ2LTMuNzg5Nzg4TDYuMzM2MjM5LS44NDg4MTdDNi4zNDgxOTQtLjgyNDkwNyA2LjM5NjAxNS0uNzA1MzU1IDYuMzk2MDE1LS42OTM0QzYuMzk2MDE1LS41ODU4MDMgNi4xMzMwMDEtLjM3MDYxIDUuNzUwNDM2LS4zNDY3QzUuNjc4NzA1LS4zNDY3IDUuNTQ3MTk4LS4zMzQ3NDUgNS41NDcxOTgtLjExOTU1MkM1LjU0NzE5OCAwIDUuNjY2NzUgMCA1LjcyNjUyNiAwQzUuOTI5NzYzIDAgNi4xNjg4NjctLjAyMzkxIDYuMzcyMTA1LS4wMjM5MUg3LjY4NzE3M0M3LjkwMjM2Ni0uMDIzOTEgOC4xMjk1MTQgMCA4LjMzMjc1MiAwQzguNDE2NDM4IDAgOC41NDc5NDUgMCA4LjU0Nzk0NS0uMjI3MTQ4QzguNTQ3OTQ1LS4zNDY3IDguNDI4Mzk0LS4zNDY3IDguMzIwNzk3LS4zNDY3QzcuNjAzNDg3LS4zNTg2NTUgNy41Nzk1NzctLjQxODQzMSA3LjM3NjMzOS0uODYwNzcyTDUuNzk4MjU3LTQuNTY2ODc0TDcuMzE2NTYzLTYuMTkyNzc3QzcuNDM2MTE1LTYuMzEyMzI5IDcuNzExMDgzLTYuNjExMjA4IDcuODE4NjgtNi43MzA3NkM4LjMzMjc1Mi03LjI2ODc0MiA4LjgxMDk1OS03Ljc1ODkwNCA5Ljc3OTMyOC03LjgxODY4QzkuODk4ODc5LTcuODMwNjM1IDEwLjAxODQzMS03LjgzMDYzNSAxMC4wMTg0MzEtOC4wMzM4NzNDMTAuMDE4NDMxLTguMTY1MzggOS45MTA4MzQtOC4xNjUzOCA5Ljg2MzAxNC04LjE2NTM4QzkuNjk1NjQxLTguMTY1MzggOS41MTYzMTQtOC4xNDE0NjkgOS4zNDg5NDEtOC4xNDE0NjlIOC43OTkwMDRDOC40MTY0MzgtOC4xNDE0NjkgNy45OTgwMDctOC4xNjUzOCA3LjYyNzM5Ny04LjE2NTM4QzcuNTQzNzExLTguMTY1MzggNy40MDAyNDktOC4xNjUzOCA3LjQwMDI0OS03Ljk1MDE4N0M3LjQwMDI0OS03LjgzMDYzNSA3LjQ4MzkzNS03LjgxODY4IDcuNTU1NjY2LTcuODE4NjhDNy43NDY5NDktNy43OTQ3NyA3Ljk1MDE4Ny03LjY5OTEyOCA3Ljk1MDE4Ny03LjQ3MTk4TDcuOTM4MjMyLTcuNDQ4MDdDNy45MjYyNzYtNy4zNjQzODQgNy45MDIzNjYtNy4yNDQ4MzIgNy43NzA4NTktNy4xMDEzN0w1LjY3ODcwNS00Ljg1Mzc5OFonLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzAnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMi04OCcvPgo8dXNlIHg9JzEzLjk3NTkzNycgeT0nMCcgeGxpbms6aHJlZj0nI2czLTU4Jy8+Cjx1c2UgeD0nMjAuNTQ4NDI4JyB5PScwJyB4bGluazpocmVmPScjZzMtMTAnLz4KPHVzZSB4PSczMS42NTk0MTEnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS0yJy8+Cjx1c2UgeD0nNDMuNjE0NTcxJyB5PScwJyB4bGluazpocmVmPScjZzMtOTEnLz4KPHVzZSB4PSc0Ni44NjYyMzInIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nNTYuMTY0NzI5JyB5PScwJyB4bGluazpocmVmPScjZzMtNTInLz4KPHVzZSB4PSc2Mi4wMTc3MicgeT0nMCcgeGxpbms6aHJlZj0nI2cyLTU5Jy8+Cjx1c2UgeD0nNjcuMjYxODc5JyB5PScwJyB4bGluazpocmVmPScjZzMtNTInLz4KPHVzZSB4PSc3My4xMTQ4NjknIHk9JzAnIHhsaW5rOmhyZWY9JyNnMy05MycvPgo8dXNlIHg9Jzc5LjY4NzM1OScgeT0nMCcgeGxpbms6aHJlZj0nI2cxLTMzJy8+Cjx1c2UgeD0nOTQuOTYzMzkxJyB5PScwJyB4bGluazpocmVmPScjZzAtODInLz4KPC9nPgo8L3N2Zz4=) with zero mean and
as covariance function.
We discretize the covariance model using
with zero mean and
as covariance function.
We discretize the covariance model using  for each
for each  .
We get a
.
We get a  fields from the process from which we
estimate the covariance model .
fields from the process from which we
estimate the covariance model .
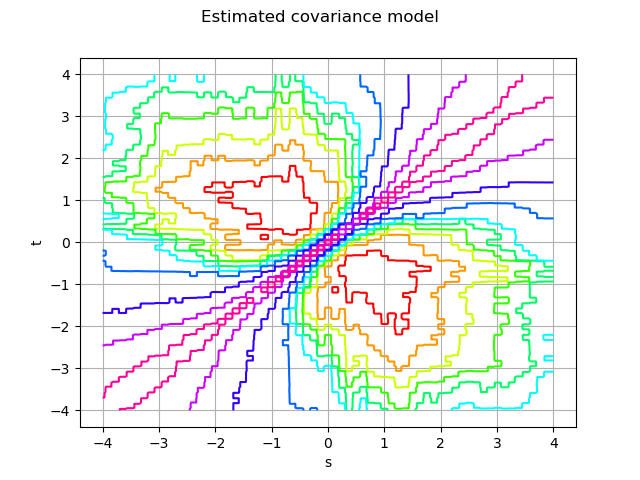
We use the object NonStationaryCovarianceModelFactory which creates a UserDefinedCovarianceModel.
import math as m
import openturns as ot
import openturns.viewer as viewer
from matplotlib import pylab as plt
ot.Log.Show(ot.Log.NONE)
Create the time grid
t0 = -4.0
tmax = 4.0
N = 64
dt = (tmax - t0) / N
tgrid = ot.RegularGrid(t0, dt, N)
Create the covariance function at (s,t)
def C(s, t):
return m.exp(-4.0 * abs(s - t) / (1 + (s * s + t * t)))
Draw…
def f(X):
s, t = X
return [C(s, t)]
func = ot.PythonFunction(2, 1, f)
func.setDescription([":math:`s`", ":math:`t`", ":math:`cov`"])
graph = func.draw([t0] * 2, [tmax] * 2)
graph.setTitle("Original covariance model")
graph.setLegendPosition("")
view = viewer.View(graph)
Create data from a non stationary normal process Omega * [0,T]–> R
# Create the collection of HermitianMatrix
covariance = ot.CovarianceMatrix(N)
for k in range(N):
s = tgrid.getValue(k)
for ll in range(k + 1):
t = tgrid.getValue(ll)
covariance[k, ll] = C(s, t)
covmodel = ot.UserDefinedCovarianceModel(tgrid, covariance)
Create the normal process with that covariance model based on the mesh tgrid
process = ot.GaussianProcess(covmodel, tgrid)
# Get a sample of fields from the process
N = 1000
sample = process.getSample(N)
The covariance model factory
factory = ot.NonStationaryCovarianceModelFactory()
# Estimation on a sample
estimatedModel = factory.build(sample)
graph = estimatedModel.draw(0, 0, t0, tmax, 256, False)
graph.setTitle("Estimated covariance model")
graph.setLegendPosition("")
view = viewer.View(graph)
plt.show()
Total running time of the script: ( 0 minutes 0.263 seconds)