Note
Go to the end to download the full example code
Estimate a non stationary covariance function¶
The objective of this use case is to estimate  from several
fields generated by the process
from several
fields generated by the process  . We suppose that the process
is not stationary.
. We suppose that the process
is not stationary.
In the following example, we illustrate the estimation of the non stationary covariance model
![C : \mathcal{D} \times [-4, 4] \rightarrow \mathbb{R}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMS4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzEwMy4yNzYxMTdwdCcgaGVpZ2h0PScxMS45NTUxNjhwdCcgdmlld0JveD0nMCAtOC45NjYzNzYgMTAzLjI3NjExNyAxMS45NTUxNjgnPgo8ZGVmcz4KPHBhdGggaWQ9J2cwLTgyJyBkPSdNMy4yMDM5ODUtMy43NTM5MjNIMy42MzQzNzFMNS40Mjc2NDYtLjk4MDMyNEM1LjU0NzE5OC0uNzg5MDQxIDUuODM0MTIyLS4zMjI3OSA1Ljk2NTYyOS0uMTQzNDYyQzYuMDQ5MzE1IDAgNi4wODUxODEgMCA2LjM2MDE0OSAwSDguMDA5OTYzQzguMjI1MTU2IDAgOC40MDQ0ODMgMCA4LjQwNDQ4My0uMjE1MTkzQzguNDA0NDgzLS4zMTA4MzQgOC4zMzI3NTItLjM5NDUyMSA4LjIyNTE1Ni0uNDE4NDMxQzcuNzgyODE0LS41MTQwNzIgNy4xOTcwMTEtMS4zMDMxMTMgNi45MTAwODctMS42ODU2NzlDNi44MjY0MDEtMS44MDUyMyA2LjIyODY0My0yLjU5NDI3MSA1LjQyNzY0Ni0zLjg4NTQzQzYuNDkxNjU2LTQuMDc2NzEyIDcuNTE5ODAxLTQuNTMxMDA5IDcuNTE5ODAxLTUuOTUzNjc0QzcuNTE5ODAxLTcuNjE1NDQyIDUuNzYyMzkxLTguMTg5MjkgNC4zNTE2ODEtOC4xODkyOUguNTk3NzU4Qy4zODI1NjUtOC4xODkyOSAuMTkxMjgzLTguMTg5MjkgLjE5MTI4My03Ljk3NDA5N0MuMTkxMjgzLTcuNzcwODU5IC40MTg0MzEtNy43NzA4NTkgLjUxNDA3Mi03Ljc3MDg1OUMxLjE5NTUxNy03Ljc3MDg1OSAxLjI1NTI5My03LjY4NzE3MyAxLjI1NTI5My03LjA4OTQxNVYtMS4wOTk4NzVDMS4yNTUyOTMtLjUwMjExNyAxLjE5NTUxNy0uNDE4NDMxIC41MTQwNzItLjQxODQzMUMuNDE4NDMxLS40MTg0MzEgLjE5MTI4My0uNDE4NDMxIC4xOTEyODMtLjIxNTE5M0MuMTkxMjgzIDAgLjM4MjU2NSAwIC41OTc3NTggMEgzLjg3MzQ3NEM0LjA4ODY2NyAwIDQuMjY3OTk1IDAgNC4yNjc5OTUtLjIxNTE5M0M0LjI2Nzk5NS0uNDE4NDMxIDQuMDY0NzU3LS40MTg0MzEgMy45MzMyNS0uNDE4NDMxQzMuMjUxODA2LS40MTg0MzEgMy4yMDM5ODUtLjUxNDA3MiAzLjIwMzk4NS0xLjA5OTg3NVYtMy43NTM5MjNaTTUuNTExMzMzLTQuMzM5NzI2QzUuODQ2MDc3LTQuNzgyMDY3IDUuODgxOTQzLTUuNDE1NjkxIDUuODgxOTQzLTUuOTQxNzE5QzUuODgxOTQzLTYuNTE1NTY3IDUuODEwMjEyLTcuMTQ5MTkxIDUuNDI3NjQ2LTcuNjM5MzUyQzUuOTE3ODA4LTcuNTMxNzU2IDcuMTAxMzctNy4xNjExNDYgNy4xMDEzNy01Ljk1MzY3NEM3LjEwMTM3LTUuMTc2NTg4IDYuNzQyNzE1LTQuNTY2ODc0IDUuNTExMzMzLTQuMzM5NzI2Wk0zLjIwMzk4NS03LjEyNTI4QzMuMjAzOTg1LTcuMzc2MzM5IDMuMjAzOTg1LTcuNzcwODU5IDMuOTQ1MjA1LTcuNzcwODU5QzQuOTYxMzk1LTcuNzcwODU5IDUuNDYzNTEyLTcuMzUyNDI4IDUuNDYzNTEyLTUuOTQxNzE5QzUuNDYzNTEyLTQuMzk5NTAyIDUuMDkyOTAyLTQuMTcyMzU0IDMuMjAzOTg1LTQuMTcyMzU0Vi03LjEyNTI4Wk0xLjU3ODA4Mi0uNDE4NDMxQzEuNjczNzI0LS42MzM2MjQgMS42NzM3MjQtLjk2ODM2OSAxLjY3MzcyNC0xLjA3NTk2NVYtNy4xMTMzMjVDMS42NzM3MjQtNy4yMzI4NzcgMS42NzM3MjQtNy41NTU2NjYgMS41NzgwODItNy43NzA4NTlIMi45NDA5NzFDMi43ODU1NTQtNy41Nzk1NzcgMi43ODU1NTQtNy4zNDA0NzMgMi43ODU1NTQtNy4xNjExNDZWLTEuMDc1OTY1QzIuNzg1NTU0LS45NTY0MTMgMi43ODU1NTQtLjYzMzYyNCAyLjg4MTE5Ni0uNDE4NDMxSDEuNTc4MDgyWk00LjEyNDUzMy0zLjc1MzkyM0M0LjIwODIxOS0zLjc2NTg3OCA0LjI1NjA0LTMuNzc3ODMzIDQuMzUxNjgxLTMuNzc3ODMzQzQuNTMxMDA5LTMuNzc3ODMzIDQuNzk0MDIyLTMuODAxNzQzIDQuOTczMzUtMy44MjU2NTRDNS4xNTI2NzctMy41Mzg3MyA2LjQ0MzgzNi0xLjQxMDcxIDcuNDM2MTE1LS40MTg0MzFINi4yNzY0NjNMNC4xMjQ1MzMtMy43NTM5MjNaJy8+CjxwYXRoIGlkPSdnMS0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2cxLTInIGQ9J000LjY1MDU2LTMuMzIzNTM3TDIuMjU5NTI3LTUuNzAyNjE1QzIuMTE2MDY1LTUuODQ2MDc3IDIuMDkyMTU0LTUuODY5OTg4IDEuOTk2NTEzLTUuODY5OTg4QzEuODc2OTYxLTUuODY5OTg4IDEuNzU3NDEtNS43NjIzOTEgMS43NTc0MS01LjYzMDg4NEMxLjc1NzQxLTUuNTQ3MTk4IDEuNzgxMzItNS41MjMyODggMS45MTI4MjctNS4zOTE3ODFMNC4zMDM4NjEtMi45ODg3OTJMMS45MTI4MjctLjU4NTgwM0MxLjc4MTMyLS40NTQyOTYgMS43NTc0MS0uNDMwMzg2IDEuNzU3NDEtLjM0NjdDMS43NTc0MS0uMjE1MTkzIDEuODc2OTYxLS4xMDc1OTcgMS45OTY1MTMtLjEwNzU5N0MyLjA5MjE1NC0uMTA3NTk3IDIuMTE2MDY1LS4xMzE1MDcgMi4yNTk1MjctLjI3NDk2OUw0LjYzODYwNS0yLjY1NDA0N0w3LjExMzMyNS0uMTc5MzI4QzcuMTM3MjM1LS4xNjczNzIgNy4yMjA5MjItLjEwNzU5NyA3LjI5MjY1My0uMTA3NTk3QzcuNDM2MTE1LS4xMDc1OTcgNy41MzE3NTYtLjIxNTE5MyA3LjUzMTc1Ni0uMzQ2N0M3LjUzMTc1Ni0uMzcwNjEgNy41MzE3NTYtLjQxODQzMSA3LjQ5NTg5LS40NzgyMDdDNy40ODM5MzUtLjUwMjExNyA1LjU4MzA2NC0yLjM3OTA3OCA0Ljk4NTMwNS0yLjk4ODc5Mkw3LjE3MzEwMS01LjE3NjU4OEM3LjIzMjg3Ny01LjI0ODMxOSA3LjQxMjIwNC01LjQwMzczNiA3LjQ3MTk4LTUuNDc1NDY3QzcuNDgzOTM1LTUuNDk5Mzc3IDcuNTMxNzU2LTUuNTQ3MTk4IDcuNTMxNzU2LTUuNjMwODg0QzcuNTMxNzU2LTUuNzYyMzkxIDcuNDM2MTE1LTUuODY5OTg4IDcuMjkyNjUzLTUuODY5OTg4QzcuMTk3MDExLTUuODY5OTg4IDcuMTQ5MTkxLTUuODIyMTY3IDcuMDE3Njg0LTUuNjkwNjZMNC42NTA1Ni0zLjMyMzUzN1onLz4KPHBhdGggaWQ9J2cxLTMzJyBkPSdNOS45NzA2MS0yLjc0OTY4OUM5LjMxMzA3Ni0yLjI0NzU3MiA4Ljk5MDI4Ni0xLjc1NzQxIDguODk0NjQ1LTEuNjAxOTkzQzguMzU2NjYzLS43NzcwODYgOC4yNjEwMjEtLjAyMzkxIDguMjYxMDIxLS4wMTE5NTVDOC4yNjEwMjEgLjEzMTUwNyA4LjQwNDQ4MyAuMTMxNTA3IDguNTAwMTI1IC4xMzE1MDdDOC43MDMzNjIgLjEzMTUwNyA4LjcxNTMxOCAuMTA3NTk3IDguNzYzMTM4LS4xMDc1OTdDOS4wMzgxMDctMS4yNzkyMDMgOS43NDM0NjItMi4yODM0MzcgMTEuMDk0Mzk2LTIuODMzMzc1QzExLjIzNzg1OC0yLjg4MTE5NiAxMS4yNzM3MjQtMi45MDUxMDYgMTEuMjczNzI0LTIuOTg4NzkyUzExLjIwMTk5My0zLjEwODM0NCAxMS4xNzgwODItMy4xMjAyOTlDMTAuNjUyMDU1LTMuMzIzNTM3IDkuMjA1NDc5LTMuOTIxMjk1IDguNzUxMTgzLTUuOTI5NzYzQzguNzE1MzE4LTYuMDczMjI1IDguNzAzMzYyLTYuMTA5MDkxIDguNTAwMTI1LTYuMTA5MDkxQzguNDA0NDgzLTYuMTA5MDkxIDguMjYxMDIxLTYuMTA5MDkxIDguMjYxMDIxLTUuOTY1NjI5QzguMjYxMDIxLTUuOTQxNzE5IDguMzY4NjE4LTUuMTg4NTQzIDguODcwNzM1LTQuMzg3NTQ3QzkuMTA5ODM4LTQuMDI4ODkyIDkuNDU2NTM4LTMuNjEwNDYxIDkuOTcwNjEtMy4yMjc4OTVIMS4wODc5MkMuODcyNzI3LTMuMjI3ODk1IC42NTc1MzQtMy4yMjc4OTUgLjY1NzUzNC0yLjk4ODc5MlMuODcyNzI3LTIuNzQ5Njg5IDEuMDg3OTItMi43NDk2ODlIOS45NzA2MVonLz4KPHBhdGggaWQ9J2cxLTY4JyBkPSdNMi40Mzg4NTQgMEM1LjIyNDQwOCAwIDkuMTU3NjU5LTIuMTI4MDIgOS4xNTc2NTktNS4zOTE3ODFDOS4xNTc2NTktNi40NTU3OTEgOC42NTU1NDItNy4xMjUyOCA4LjA2OTczOC03LjQ5NTg5QzcuMDQxNTk0LTguMTY1MzggNS45NDE3MTktOC4xNjUzOCA0LjgwNTk3OC04LjE2NTM4QzMuNzc3ODMzLTguMTY1MzggMy4wNzI0NzgtOC4xNjUzOCAyLjA2ODI0NC03LjczNDk5NEMuNDc4MjA3LTcuMDI5NjM5IC4yNTEwNTktNi4wMzczNiAuMjUxMDU5LTUuOTQxNzE5Qy4yNTEwNTktNS44Njk5ODggLjI5ODg3OS01Ljg0NjA3NyAuMzcwNjEtNS44NDYwNzdDLjU2MTg5My01Ljg0NjA3NyAuODM2ODYyLTYuMDEzNDUgLjkzMjUwMy02LjA3MzIyNUMxLjE4MzU2Mi02LjI0MDU5OCAxLjIxOTQyNy02LjMxMjMyOSAxLjI5MTE1OC02LjUzOTQ3N0MxLjQ1ODUzMS03LjAxNzY4NCAxLjc5MzI3NS03LjQzNjExNSAzLjI5OTYyNi03LjUwNzg0NkMzLjEwODM0NC01LjAwOTIxNSAyLjQ5ODYzLTIuNzI1Nzc4IDEuNjYxNzY4LS42MzM2MjRDMS4yMTk0MjctLjQ3ODIwNyAuOTMyNTAzLS4yMDMyMzggLjkzMjUwMy0uMDgzNjg2Qy45MzI1MDMtLjAxMTk1NSAuOTQ0NDU4IDAgMS4yMDc0NzIgMEgyLjQzODg1NFpNMi40OTg2My0uNjU3NTM0QzMuODYxNTE5LTMuOTkzMDI2IDQuMTEyNTc4LTYuMDczMjI1IDQuMjc5OTUtNy41MDc4NDZDNS4wODA5NDYtNy41MDc4NDYgOC4xNDE0NjktNy41MDc4NDYgOC4xNDE0NjktNC44Nzc3MDlDOC4xNDE0NjktMi41MzQ0OTYgNi4wMzczNi0uNjU3NTM0IDMuMTQ0MjA5LS42NTc1MzRIMi40OTg2M1onLz4KPHBhdGggaWQ9J2czLTUyJyBkPSdNNC4zMTU4MTYtNy43ODI4MTRDNC4zMTU4MTYtOC4wMDk5NjMgNC4zMTU4MTYtOC4wNjk3MzggNC4xNDg0NDMtOC4wNjk3MzhDNC4wNTI4MDItOC4wNjk3MzggNC4wMTY5MzYtOC4wNjk3MzggMy45MjEyOTUtNy45MjYyNzZMLjMyMjc5LTIuMzQzMjEzVi0xLjk5NjUxM0gzLjQ2Njk5OVYtLjkwODU5M0MzLjQ2Njk5OS0uNDY2MjUyIDMuNDQzMDg4LS4zNDY3IDIuNTcwMzYxLS4zNDY3SDIuMzMxMjU4VjBDMi42MDYyMjctLjAyMzkxIDMuNTUwNjg1LS4wMjM5MSAzLjg4NTQzLS4wMjM5MVM1LjE3NjU4OC0uMDIzOTEgNS40NTE1NTcgMFYtLjM0NjdINS4yMTI0NTNDNC4zNTE2ODEtLjM0NjcgNC4zMTU4MTYtLjQ2NjI1MiA0LjMxNTgxNi0uOTA4NTkzVi0xLjk5NjUxM0g1LjUyMzI4OFYtMi4zNDMyMTNINC4zMTU4MTZWLTcuNzgyODE0Wk0zLjUyNjc3NS02Ljg1MDMxMVYtMi4zNDMyMTNILjYyMTY2OUwzLjUyNjc3NS02Ljg1MDMxMVonLz4KPHBhdGggaWQ9J2czLTU4JyBkPSdNMi4xOTk3NTEtNC41Nzg4MjlDMi4xOTk3NTEtNC45MDE2MTkgMS45MjQ3ODItNS4xNTI2NzcgMS42MjU5MDMtNS4xNTI2NzdDMS4yNzkyMDMtNS4xNTI2NzcgMS4wNDAxLTQuODc3NzA5IDEuMDQwMS00LjU3ODgyOUMxLjA0MDEtNC4yMjAxNzQgMS4zMzg5NzktMy45OTMwMjYgMS42MTM5NDgtMy45OTMwMjZDMS45MzY3MzctMy45OTMwMjYgMi4xOTk3NTEtNC4yNDQwODUgMi4xOTk3NTEtNC41Nzg4MjlaTTIuMTk5NzUxLS41ODU4MDNDMi4xOTk3NTEtLjkwODU5MyAxLjkyNDc4Mi0xLjE1OTY1MSAxLjYyNTkwMy0xLjE1OTY1MUMxLjI3OTIwMy0xLjE1OTY1MSAxLjA0MDEtLjg4NDY4MiAxLjA0MDEtLjU4NTgwM0MxLjA0MDEtLjIyNzE0OCAxLjMzODk3OSAwIDEuNjEzOTQ4IDBDMS45MzY3MzcgMCAyLjE5OTc1MS0uMjUxMDU5IDIuMTk5NzUxLS41ODU4MDNaJy8+CjxwYXRoIGlkPSdnMy05MScgZD0nTTIuOTg4NzkyIDIuOTg4NzkyVjIuNTQ2NDUxSDEuODI5MTQxVi04LjUyNDAzNUgyLjk4ODc5MlYtOC45NjYzNzZIMS4zODY4VjIuOTg4NzkySDIuOTg4NzkyWicvPgo8cGF0aCBpZD0nZzMtOTMnIGQ9J00xLjg1MzA1MS04Ljk2NjM3NkguMjUxMDU5Vi04LjUyNDAzNUgxLjQxMDcxVjIuNTQ2NDUxSC4yNTEwNTlWMi45ODg3OTJIMS44NTMwNTFWLTguOTY2Mzc2WicvPgo8cGF0aCBpZD0nZzItNTknIGQ9J00yLjMzMTI1OCAuMDQ3ODIxQzIuMzMxMjU4LS42NDU1NzkgMi4xMDQxMS0xLjE1OTY1MSAxLjYxMzk0OC0xLjE1OTY1MUMxLjIzMTM4Mi0xLjE1OTY1MSAxLjA0MDEtLjg0ODgxNyAxLjA0MDEtLjU4NTgwM1MxLjIxOTQyNyAwIDEuNjI1OTAzIDBDMS43ODEzMiAwIDEuOTEyODI3LS4wNDc4MjEgMi4wMjA0MjMtLjE1NTQxN0MyLjA0NDMzNC0uMTc5MzI4IDIuMDU2Mjg5LS4xNzkzMjggMi4wNjgyNDQtLjE3OTMyOEMyLjA5MjE1NC0uMTc5MzI4IDIuMDkyMTU0LS4wMTE5NTUgMi4wOTIxNTQgLjA0NzgyMUMyLjA5MjE1NCAuNDQyMzQxIDIuMDIwNDIzIDEuMjE5NDI3IDEuMzI3MDI0IDEuOTk2NTEzQzEuMTk1NTE3IDIuMTM5OTc1IDEuMTk1NTE3IDIuMTYzODg1IDEuMTk1NTE3IDIuMTg3Nzk2QzEuMTk1NTE3IDIuMjQ3NTcyIDEuMjU1MjkzIDIuMzA3MzQ3IDEuMzE1MDY4IDIuMzA3MzQ3QzEuNDEwNzEgMi4zMDczNDcgMi4zMzEyNTggMS40MjI2NjUgMi4zMzEyNTggLjA0NzgyMVonLz4KPHBhdGggaWQ9J2cyLTY3JyBkPSdNOC45MzA1MTEtOC4zMDg4NDJDOC45MzA1MTEtOC40MTY0MzggOC44NDY4MjQtOC40MTY0MzggOC44MjI5MTQtOC40MTY0MzhTOC43NTExODMtOC40MTY0MzggOC42NTU1NDItOC4yOTY4ODdMNy44MzA2MzUtNy4yOTI2NTNDNy40MTIyMDQtOC4wMDk5NjMgNi43NTQ2Ny04LjQxNjQzOCA1Ljg1ODAzMi04LjQxNjQzOEMzLjI3NTcxNi04LjQxNjQzOCAuNTk3NzU4LTUuNzk4MjU3IC41OTc3NTgtMi45ODg3OTJDLjU5Nzc1OC0uOTkyMjc5IDEuOTk2NTEzIC4yNTEwNTkgMy43NDE5NjggLjI1MTA1OUM0LjY5ODM4MSAuMjUxMDU5IDUuNTM1MjQzLS4xNTU0MTcgNi4yMjg2NDMtLjc0MTIyQzcuMjY4NzQyLTEuNjEzOTQ4IDcuNTc5NTc3LTIuNzczNTk5IDcuNTc5NTc3LTIuODY5MjRDNy41Nzk1NzctMi45NzY4MzcgNy40ODM5MzUtMi45NzY4MzcgNy40NDgwNy0yLjk3NjgzN0M3LjM0MDQ3My0yLjk3NjgzNyA3LjMyODUxOC0yLjkwNTEwNiA3LjMwNDYwOC0yLjg1NzI4NUM2Ljc1NDY3LS45OTIyNzkgNS4xNDA3MjItLjA5NTY0MSAzLjk0NTIwNS0uMDk1NjQxQzIuNjc3OTU4LS4wOTU2NDEgMS41NzgwODItLjkwODU5MyAxLjU3ODA4Mi0yLjYwNjIyN0MxLjU3ODA4Mi0yLjk4ODc5MiAxLjY5NzYzNC01LjA2ODk5MSAzLjA0ODU2OC02LjYzNTExOEMzLjcwNjEwMi03LjQwMDI0OSA0LjgyOTg4OC04LjA2OTczOCA1Ljk2NTYyOS04LjA2OTczOEM3LjI4MDY5Ny04LjA2OTczOCA3Ljg2NjUwMS02Ljk4MTgxOCA3Ljg2NjUwMS01Ljc2MjM5MUM3Ljg2NjUwMS01LjQ1MTU1NyA3LjgzMDYzNS01LjE4ODU0MyA3LjgzMDYzNS01LjE0MDcyMkM3LjgzMDYzNS01LjAzMzEyNiA3Ljk1MDE4Ny01LjAzMzEyNiA3Ljk4NjA1Mi01LjAzMzEyNkM4LjExNzU1OS01LjAzMzEyNiA4LjEyOTUxNC01LjA0NTA4MSA4LjE3NzMzNS01LjI2MDI3NEw4LjkzMDUxMS04LjMwODg0MlonLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzAnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMi02NycvPgo8dXNlIHg9JzEyLjU1NDQ0MScgeT0nMCcgeGxpbms6aHJlZj0nI2czLTU4Jy8+Cjx1c2UgeD0nMTkuMTI2OTMyJyB5PScwJyB4bGluazpocmVmPScjZzEtNjgnLz4KPHVzZSB4PSczMS4zMzc4MjQnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS0yJy8+Cjx1c2UgeD0nNDMuMjkyOTg1JyB5PScwJyB4bGluazpocmVmPScjZzMtOTEnLz4KPHVzZSB4PSc0Ni41NDQ2NDYnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nNTUuODQzMTQzJyB5PScwJyB4bGluazpocmVmPScjZzMtNTInLz4KPHVzZSB4PSc2MS42OTYxMzQnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMi01OScvPgo8dXNlIHg9JzY2Ljk0MDI5MicgeT0nMCcgeGxpbms6aHJlZj0nI2czLTUyJy8+Cjx1c2UgeD0nNzIuNzkzMjgzJyB5PScwJyB4bGluazpocmVmPScjZzMtOTMnLz4KPHVzZSB4PSc3OS4zNjU3NzMnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS0zMycvPgo8dXNlIHg9Jzk0LjY0MTgwNScgeT0nMCcgeGxpbms6aHJlZj0nI2cwLTgyJy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9NCAtLT4=) defined by:
defined by:

The domain  is discretized on a mesh
is discretized on a mesh  which is a time grid with 64 points.
We build a normal process
which is a time grid with 64 points.
We build a normal process ![X: \Omega \times [-4, 4] \rightarrow \mathbb{R}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMS4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzEwMy41OTc3MDNwdCcgaGVpZ2h0PScxMS45NTUxNjhwdCcgdmlld0JveD0nMCAtOC45NjYzNzYgMTAzLjU5NzcwMyAxMS45NTUxNjgnPgo8ZGVmcz4KPHBhdGggaWQ9J2cwLTgyJyBkPSdNMy4yMDM5ODUtMy43NTM5MjNIMy42MzQzNzFMNS40Mjc2NDYtLjk4MDMyNEM1LjU0NzE5OC0uNzg5MDQxIDUuODM0MTIyLS4zMjI3OSA1Ljk2NTYyOS0uMTQzNDYyQzYuMDQ5MzE1IDAgNi4wODUxODEgMCA2LjM2MDE0OSAwSDguMDA5OTYzQzguMjI1MTU2IDAgOC40MDQ0ODMgMCA4LjQwNDQ4My0uMjE1MTkzQzguNDA0NDgzLS4zMTA4MzQgOC4zMzI3NTItLjM5NDUyMSA4LjIyNTE1Ni0uNDE4NDMxQzcuNzgyODE0LS41MTQwNzIgNy4xOTcwMTEtMS4zMDMxMTMgNi45MTAwODctMS42ODU2NzlDNi44MjY0MDEtMS44MDUyMyA2LjIyODY0My0yLjU5NDI3MSA1LjQyNzY0Ni0zLjg4NTQzQzYuNDkxNjU2LTQuMDc2NzEyIDcuNTE5ODAxLTQuNTMxMDA5IDcuNTE5ODAxLTUuOTUzNjc0QzcuNTE5ODAxLTcuNjE1NDQyIDUuNzYyMzkxLTguMTg5MjkgNC4zNTE2ODEtOC4xODkyOUguNTk3NzU4Qy4zODI1NjUtOC4xODkyOSAuMTkxMjgzLTguMTg5MjkgLjE5MTI4My03Ljk3NDA5N0MuMTkxMjgzLTcuNzcwODU5IC40MTg0MzEtNy43NzA4NTkgLjUxNDA3Mi03Ljc3MDg1OUMxLjE5NTUxNy03Ljc3MDg1OSAxLjI1NTI5My03LjY4NzE3MyAxLjI1NTI5My03LjA4OTQxNVYtMS4wOTk4NzVDMS4yNTUyOTMtLjUwMjExNyAxLjE5NTUxNy0uNDE4NDMxIC41MTQwNzItLjQxODQzMUMuNDE4NDMxLS40MTg0MzEgLjE5MTI4My0uNDE4NDMxIC4xOTEyODMtLjIxNTE5M0MuMTkxMjgzIDAgLjM4MjU2NSAwIC41OTc3NTggMEgzLjg3MzQ3NEM0LjA4ODY2NyAwIDQuMjY3OTk1IDAgNC4yNjc5OTUtLjIxNTE5M0M0LjI2Nzk5NS0uNDE4NDMxIDQuMDY0NzU3LS40MTg0MzEgMy45MzMyNS0uNDE4NDMxQzMuMjUxODA2LS40MTg0MzEgMy4yMDM5ODUtLjUxNDA3MiAzLjIwMzk4NS0xLjA5OTg3NVYtMy43NTM5MjNaTTUuNTExMzMzLTQuMzM5NzI2QzUuODQ2MDc3LTQuNzgyMDY3IDUuODgxOTQzLTUuNDE1NjkxIDUuODgxOTQzLTUuOTQxNzE5QzUuODgxOTQzLTYuNTE1NTY3IDUuODEwMjEyLTcuMTQ5MTkxIDUuNDI3NjQ2LTcuNjM5MzUyQzUuOTE3ODA4LTcuNTMxNzU2IDcuMTAxMzctNy4xNjExNDYgNy4xMDEzNy01Ljk1MzY3NEM3LjEwMTM3LTUuMTc2NTg4IDYuNzQyNzE1LTQuNTY2ODc0IDUuNTExMzMzLTQuMzM5NzI2Wk0zLjIwMzk4NS03LjEyNTI4QzMuMjAzOTg1LTcuMzc2MzM5IDMuMjAzOTg1LTcuNzcwODU5IDMuOTQ1MjA1LTcuNzcwODU5QzQuOTYxMzk1LTcuNzcwODU5IDUuNDYzNTEyLTcuMzUyNDI4IDUuNDYzNTEyLTUuOTQxNzE5QzUuNDYzNTEyLTQuMzk5NTAyIDUuMDkyOTAyLTQuMTcyMzU0IDMuMjAzOTg1LTQuMTcyMzU0Vi03LjEyNTI4Wk0xLjU3ODA4Mi0uNDE4NDMxQzEuNjczNzI0LS42MzM2MjQgMS42NzM3MjQtLjk2ODM2OSAxLjY3MzcyNC0xLjA3NTk2NVYtNy4xMTMzMjVDMS42NzM3MjQtNy4yMzI4NzcgMS42NzM3MjQtNy41NTU2NjYgMS41NzgwODItNy43NzA4NTlIMi45NDA5NzFDMi43ODU1NTQtNy41Nzk1NzcgMi43ODU1NTQtNy4zNDA0NzMgMi43ODU1NTQtNy4xNjExNDZWLTEuMDc1OTY1QzIuNzg1NTU0LS45NTY0MTMgMi43ODU1NTQtLjYzMzYyNCAyLjg4MTE5Ni0uNDE4NDMxSDEuNTc4MDgyWk00LjEyNDUzMy0zLjc1MzkyM0M0LjIwODIxOS0zLjc2NTg3OCA0LjI1NjA0LTMuNzc3ODMzIDQuMzUxNjgxLTMuNzc3ODMzQzQuNTMxMDA5LTMuNzc3ODMzIDQuNzk0MDIyLTMuODAxNzQzIDQuOTczMzUtMy44MjU2NTRDNS4xNTI2NzctMy41Mzg3MyA2LjQ0MzgzNi0xLjQxMDcxIDcuNDM2MTE1LS40MTg0MzFINi4yNzY0NjNMNC4xMjQ1MzMtMy43NTM5MjNaJy8+CjxwYXRoIGlkPSdnMS0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2cxLTInIGQ9J000LjY1MDU2LTMuMzIzNTM3TDIuMjU5NTI3LTUuNzAyNjE1QzIuMTE2MDY1LTUuODQ2MDc3IDIuMDkyMTU0LTUuODY5OTg4IDEuOTk2NTEzLTUuODY5OTg4QzEuODc2OTYxLTUuODY5OTg4IDEuNzU3NDEtNS43NjIzOTEgMS43NTc0MS01LjYzMDg4NEMxLjc1NzQxLTUuNTQ3MTk4IDEuNzgxMzItNS41MjMyODggMS45MTI4MjctNS4zOTE3ODFMNC4zMDM4NjEtMi45ODg3OTJMMS45MTI4MjctLjU4NTgwM0MxLjc4MTMyLS40NTQyOTYgMS43NTc0MS0uNDMwMzg2IDEuNzU3NDEtLjM0NjdDMS43NTc0MS0uMjE1MTkzIDEuODc2OTYxLS4xMDc1OTcgMS45OTY1MTMtLjEwNzU5N0MyLjA5MjE1NC0uMTA3NTk3IDIuMTE2MDY1LS4xMzE1MDcgMi4yNTk1MjctLjI3NDk2OUw0LjYzODYwNS0yLjY1NDA0N0w3LjExMzMyNS0uMTc5MzI4QzcuMTM3MjM1LS4xNjczNzIgNy4yMjA5MjItLjEwNzU5NyA3LjI5MjY1My0uMTA3NTk3QzcuNDM2MTE1LS4xMDc1OTcgNy41MzE3NTYtLjIxNTE5MyA3LjUzMTc1Ni0uMzQ2N0M3LjUzMTc1Ni0uMzcwNjEgNy41MzE3NTYtLjQxODQzMSA3LjQ5NTg5LS40NzgyMDdDNy40ODM5MzUtLjUwMjExNyA1LjU4MzA2NC0yLjM3OTA3OCA0Ljk4NTMwNS0yLjk4ODc5Mkw3LjE3MzEwMS01LjE3NjU4OEM3LjIzMjg3Ny01LjI0ODMxOSA3LjQxMjIwNC01LjQwMzczNiA3LjQ3MTk4LTUuNDc1NDY3QzcuNDgzOTM1LTUuNDk5Mzc3IDcuNTMxNzU2LTUuNTQ3MTk4IDcuNTMxNzU2LTUuNjMwODg0QzcuNTMxNzU2LTUuNzYyMzkxIDcuNDM2MTE1LTUuODY5OTg4IDcuMjkyNjUzLTUuODY5OTg4QzcuMTk3MDExLTUuODY5OTg4IDcuMTQ5MTkxLTUuODIyMTY3IDcuMDE3Njg0LTUuNjkwNjZMNC42NTA1Ni0zLjMyMzUzN1onLz4KPHBhdGggaWQ9J2cxLTMzJyBkPSdNOS45NzA2MS0yLjc0OTY4OUM5LjMxMzA3Ni0yLjI0NzU3MiA4Ljk5MDI4Ni0xLjc1NzQxIDguODk0NjQ1LTEuNjAxOTkzQzguMzU2NjYzLS43NzcwODYgOC4yNjEwMjEtLjAyMzkxIDguMjYxMDIxLS4wMTE5NTVDOC4yNjEwMjEgLjEzMTUwNyA4LjQwNDQ4MyAuMTMxNTA3IDguNTAwMTI1IC4xMzE1MDdDOC43MDMzNjIgLjEzMTUwNyA4LjcxNTMxOCAuMTA3NTk3IDguNzYzMTM4LS4xMDc1OTdDOS4wMzgxMDctMS4yNzkyMDMgOS43NDM0NjItMi4yODM0MzcgMTEuMDk0Mzk2LTIuODMzMzc1QzExLjIzNzg1OC0yLjg4MTE5NiAxMS4yNzM3MjQtMi45MDUxMDYgMTEuMjczNzI0LTIuOTg4NzkyUzExLjIwMTk5My0zLjEwODM0NCAxMS4xNzgwODItMy4xMjAyOTlDMTAuNjUyMDU1LTMuMzIzNTM3IDkuMjA1NDc5LTMuOTIxMjk1IDguNzUxMTgzLTUuOTI5NzYzQzguNzE1MzE4LTYuMDczMjI1IDguNzAzMzYyLTYuMTA5MDkxIDguNTAwMTI1LTYuMTA5MDkxQzguNDA0NDgzLTYuMTA5MDkxIDguMjYxMDIxLTYuMTA5MDkxIDguMjYxMDIxLTUuOTY1NjI5QzguMjYxMDIxLTUuOTQxNzE5IDguMzY4NjE4LTUuMTg4NTQzIDguODcwNzM1LTQuMzg3NTQ3QzkuMTA5ODM4LTQuMDI4ODkyIDkuNDU2NTM4LTMuNjEwNDYxIDkuOTcwNjEtMy4yMjc4OTVIMS4wODc5MkMuODcyNzI3LTMuMjI3ODk1IC42NTc1MzQtMy4yMjc4OTUgLjY1NzUzNC0yLjk4ODc5MlMuODcyNzI3LTIuNzQ5Njg5IDEuMDg3OTItMi43NDk2ODlIOS45NzA2MVonLz4KPHBhdGggaWQ9J2czLTEwJyBkPSdNNy45MTQzMjEtMS44NjUwMDZINy42NTEzMDhDNy41OTE1MzItMS41NTQxNzIgNy41MzE3NTYtMS4yNDMzMzcgNy40MzYxMTUtLjk5MjI3OUM3LjM3NjMzOS0uODAwOTk2IDcuMzQwNDczLS43MDUzNTUgNi42NDcwNzMtLjcwNTM1NUg1LjcwMjYxNUM1Ljg0NjA3Ny0xLjM3NDg0NCA2LjE5Mjc3Ny0xLjk0ODY5MiA2LjY4MjkzOS0yLjY4OTkxM0M3LjI0NDgzMi0zLjU2MjY0IDcuNzk0NzctNC40MzUzNjcgNy43OTQ3Ny01LjQyNzY0NkM3Ljc5NDc3LTcuMDc3NDYgNi4yMTY2ODctOC40MTY0MzggNC4yMjAxNzQtOC40MTY0MzhDMi4yMTE3MDYtOC40MTY0MzggLjY0NTU3OS03LjA2NTUwNCAuNjQ1NTc5LTUuNDI3NjQ2Qy42NDU1NzktNC40NDczMjMgMS4xODM1NjItMy41ODY1NSAxLjc0NTQ1NS0yLjcxMzgyM0MyLjI0NzU3Mi0xLjkzNjczNyAyLjYwNjIyNy0xLjM3NDg0NCAyLjczNzczMy0uNzA1MzU1SDEuNzkzMjc1QzEuMDk5ODc1LS43MDUzNTUgMS4wNjQwMS0uODAwOTk2IDEuMDA0MjM0LS45ODAzMjRDLjkwODU5My0xLjIzMTM4MiAuODQ4ODE3LTEuNTc4MDgyIC43ODkwNDEtMS44NjUwMDZILjUyNjAyN0wuOTA4NTkzIDBIMi43NjE2NDRDMy4wMjQ2NTggMCAzLjA0ODU2OCAwIDMuMDQ4NTY4LS4yMTUxOTNDMy4wNDg1NjgtMS4wNjQwMSAyLjY2NjAwMi0yLjEwNDExIDIuNDI2ODk5LTIuNzEzODIzQzIuMDgwMTk5LTMuNjU4MjgxIDEuNzU3NDEtNC41MzEwMDkgMS43NTc0MS01LjQzOTYwMUMxLjc1NzQxLTcuMjgwNjk3IDMuMDM2NjEzLTguMTc3MzM1IDQuMjIwMTc0LTguMTc3MzM1UzYuNjgyOTM5LTcuMjgwNjk3IDYuNjgyOTM5LTUuNDM5NjAxQzYuNjgyOTM5LTQuNTMxMDA5IDYuMzQ4MTk0LTMuNjM0MzcxIDYuMDEzNDUtMi43NDk2ODlDNS44MTAyMTItMi4xNzU4NDEgNS4zOTE3ODEtMS4wNzU5NjUgNS4zOTE3ODEtLjIyNzE0OEM1LjM5MTc4MSAwIDUuNDI3NjQ2IDAgNS42OTA2NiAwSDcuNTMxNzU2TDcuOTE0MzIxLTEuODY1MDA2WicvPgo8cGF0aCBpZD0nZzMtNTInIGQ9J000LjMxNTgxNi03Ljc4MjgxNEM0LjMxNTgxNi04LjAwOTk2MyA0LjMxNTgxNi04LjA2OTczOCA0LjE0ODQ0My04LjA2OTczOEM0LjA1MjgwMi04LjA2OTczOCA0LjAxNjkzNi04LjA2OTczOCAzLjkyMTI5NS03LjkyNjI3NkwuMzIyNzktMi4zNDMyMTNWLTEuOTk2NTEzSDMuNDY2OTk5Vi0uOTA4NTkzQzMuNDY2OTk5LS40NjYyNTIgMy40NDMwODgtLjM0NjcgMi41NzAzNjEtLjM0NjdIMi4zMzEyNThWMEMyLjYwNjIyNy0uMDIzOTEgMy41NTA2ODUtLjAyMzkxIDMuODg1NDMtLjAyMzkxUzUuMTc2NTg4LS4wMjM5MSA1LjQ1MTU1NyAwVi0uMzQ2N0g1LjIxMjQ1M0M0LjM1MTY4MS0uMzQ2NyA0LjMxNTgxNi0uNDY2MjUyIDQuMzE1ODE2LS45MDg1OTNWLTEuOTk2NTEzSDUuNTIzMjg4Vi0yLjM0MzIxM0g0LjMxNTgxNlYtNy43ODI4MTRaTTMuNTI2Nzc1LTYuODUwMzExVi0yLjM0MzIxM0guNjIxNjY5TDMuNTI2Nzc1LTYuODUwMzExWicvPgo8cGF0aCBpZD0nZzMtNTgnIGQ9J00yLjE5OTc1MS00LjU3ODgyOUMyLjE5OTc1MS00LjkwMTYxOSAxLjkyNDc4Mi01LjE1MjY3NyAxLjYyNTkwMy01LjE1MjY3N0MxLjI3OTIwMy01LjE1MjY3NyAxLjA0MDEtNC44Nzc3MDkgMS4wNDAxLTQuNTc4ODI5QzEuMDQwMS00LjIyMDE3NCAxLjMzODk3OS0zLjk5MzAyNiAxLjYxMzk0OC0zLjk5MzAyNkMxLjkzNjczNy0zLjk5MzAyNiAyLjE5OTc1MS00LjI0NDA4NSAyLjE5OTc1MS00LjU3ODgyOVpNMi4xOTk3NTEtLjU4NTgwM0MyLjE5OTc1MS0uOTA4NTkzIDEuOTI0NzgyLTEuMTU5NjUxIDEuNjI1OTAzLTEuMTU5NjUxQzEuMjc5MjAzLTEuMTU5NjUxIDEuMDQwMS0uODg0NjgyIDEuMDQwMS0uNTg1ODAzQzEuMDQwMS0uMjI3MTQ4IDEuMzM4OTc5IDAgMS42MTM5NDggMEMxLjkzNjczNyAwIDIuMTk5NzUxLS4yNTEwNTkgMi4xOTk3NTEtLjU4NTgwM1onLz4KPHBhdGggaWQ9J2czLTkxJyBkPSdNMi45ODg3OTIgMi45ODg3OTJWMi41NDY0NTFIMS44MjkxNDFWLTguNTI0MDM1SDIuOTg4NzkyVi04Ljk2NjM3NkgxLjM4NjhWMi45ODg3OTJIMi45ODg3OTJaJy8+CjxwYXRoIGlkPSdnMy05MycgZD0nTTEuODUzMDUxLTguOTY2Mzc2SC4yNTEwNTlWLTguNTI0MDM1SDEuNDEwNzFWMi41NDY0NTFILjI1MTA1OVYyLjk4ODc5MkgxLjg1MzA1MVYtOC45NjYzNzZaJy8+CjxwYXRoIGlkPSdnMi01OScgZD0nTTIuMzMxMjU4IC4wNDc4MjFDMi4zMzEyNTgtLjY0NTU3OSAyLjEwNDExLTEuMTU5NjUxIDEuNjEzOTQ4LTEuMTU5NjUxQzEuMjMxMzgyLTEuMTU5NjUxIDEuMDQwMS0uODQ4ODE3IDEuMDQwMS0uNTg1ODAzUzEuMjE5NDI3IDAgMS42MjU5MDMgMEMxLjc4MTMyIDAgMS45MTI4MjctLjA0NzgyMSAyLjAyMDQyMy0uMTU1NDE3QzIuMDQ0MzM0LS4xNzkzMjggMi4wNTYyODktLjE3OTMyOCAyLjA2ODI0NC0uMTc5MzI4QzIuMDkyMTU0LS4xNzkzMjggMi4wOTIxNTQtLjAxMTk1NSAyLjA5MjE1NCAuMDQ3ODIxQzIuMDkyMTU0IC40NDIzNDEgMi4wMjA0MjMgMS4yMTk0MjcgMS4zMjcwMjQgMS45OTY1MTNDMS4xOTU1MTcgMi4xMzk5NzUgMS4xOTU1MTcgMi4xNjM4ODUgMS4xOTU1MTcgMi4xODc3OTZDMS4xOTU1MTcgMi4yNDc1NzIgMS4yNTUyOTMgMi4zMDczNDcgMS4zMTUwNjggMi4zMDczNDdDMS40MTA3MSAyLjMwNzM0NyAyLjMzMTI1OCAxLjQyMjY2NSAyLjMzMTI1OCAuMDQ3ODIxWicvPgo8cGF0aCBpZD0nZzItODgnIGQ9J001LjY3ODcwNS00Ljg1Mzc5OEw0LjU1NDkxOS03LjQ3MTk4QzQuNzEwMzM2LTcuNzU4OTA0IDUuMDY4OTkxLTcuODA2NzI1IDUuMjEyNDUzLTcuODE4NjhDNS4yODQxODQtNy44MTg2OCA1LjQxNTY5MS03LjgzMDYzNSA1LjQxNTY5MS04LjAzMzg3M0M1LjQxNTY5MS04LjE2NTM4IDUuMzA4MDk1LTguMTY1MzggNS4yMzYzNjQtOC4xNjUzOEM1LjAzMzEyNi04LjE2NTM4IDQuNzk0MDIyLTguMTQxNDY5IDQuNTkwNzg1LTguMTQxNDY5SDMuODk3Mzg1QzMuMTY4MTItOC4xNDE0NjkgMi42NDIwOTItOC4xNjUzOCAyLjYzMDEzNy04LjE2NTM4QzIuNTM0NDk2LTguMTY1MzggMi40MTQ5NDQtOC4xNjUzOCAyLjQxNDk0NC03LjkzODIzMkMyLjQxNDk0NC03LjgxODY4IDIuNTIyNTQtNy44MTg2OCAyLjY3Nzk1OC03LjgxODY4QzMuMzcxMzU3LTcuODE4NjggMy40MTkxNzgtNy42OTkxMjggMy41Mzg3My03LjQxMjIwNEw0Ljk2MTM5NS00LjA4ODY2N0wyLjM2NzEyMy0xLjMxNTA2OEMxLjkzNjczNy0uODQ4ODE3IDEuNDIyNjY1LS4zOTQ1MjEgLjUzNzk4My0uMzQ2N0MuMzk0NTIxLS4zMzQ3NDUgLjI5ODg3OS0uMzM0NzQ1IC4yOTg4NzktLjExOTU1MkMuMjk4ODc5LS4wODM2ODYgLjMxMDgzNCAwIC40NDIzNDEgMEMuNjA5NzE0IDAgLjc4OTA0MS0uMDIzOTEgLjk1NjQxMy0uMDIzOTFIMS41MTgzMDZDMS45MDA4NzItLjAyMzkxIDIuMzE5MzAzIDAgMi42ODk5MTMgMEMyLjc3MzU5OSAwIDIuOTE3MDYxIDAgMi45MTcwNjEtLjIxNTE5M0MyLjkxNzA2MS0uMzM0NzQ1IDIuODMzMzc1LS4zNDY3IDIuNzYxNjQ0LS4zNDY3QzIuNTIyNTQtLjM3MDYxIDIuMzY3MTIzLS41MDIxMTcgMi4zNjcxMjMtLjY5MzRDMi4zNjcxMjMtLjg5NjYzOCAyLjUxMDU4NS0xLjA0MDEgMi44NTcyODUtMS4zOTg3NTVMMy45MjEyOTUtMi41NTg0MDZDNC4xODQzMDktMi44MzMzNzUgNC44MTc5MzMtMy41MjY3NzUgNS4wODA5NDYtMy43ODk3ODhMNi4zMzYyMzktLjg0ODgxN0M2LjM0ODE5NC0uODI0OTA3IDYuMzk2MDE1LS43MDUzNTUgNi4zOTYwMTUtLjY5MzRDNi4zOTYwMTUtLjU4NTgwMyA2LjEzMzAwMS0uMzcwNjEgNS43NTA0MzYtLjM0NjdDNS42Nzg3MDUtLjM0NjcgNS41NDcxOTgtLjMzNDc0NSA1LjU0NzE5OC0uMTE5NTUyQzUuNTQ3MTk4IDAgNS42NjY3NSAwIDUuNzI2NTI2IDBDNS45Mjk3NjMgMCA2LjE2ODg2Ny0uMDIzOTEgNi4zNzIxMDUtLjAyMzkxSDcuNjg3MTczQzcuOTAyMzY2LS4wMjM5MSA4LjEyOTUxNCAwIDguMzMyNzUyIDBDOC40MTY0MzggMCA4LjU0Nzk0NSAwIDguNTQ3OTQ1LS4yMjcxNDhDOC41NDc5NDUtLjM0NjcgOC40MjgzOTQtLjM0NjcgOC4zMjA3OTctLjM0NjdDNy42MDM0ODctLjM1ODY1NSA3LjU3OTU3Ny0uNDE4NDMxIDcuMzc2MzM5LS44NjA3NzJMNS43OTgyNTctNC41NjY4NzRMNy4zMTY1NjMtNi4xOTI3NzdDNy40MzYxMTUtNi4zMTIzMjkgNy43MTEwODMtNi42MTEyMDggNy44MTg2OC02LjczMDc2QzguMzMyNzUyLTcuMjY4NzQyIDguODEwOTU5LTcuNzU4OTA0IDkuNzc5MzI4LTcuODE4NjhDOS44OTg4NzktNy44MzA2MzUgMTAuMDE4NDMxLTcuODMwNjM1IDEwLjAxODQzMS04LjAzMzg3M0MxMC4wMTg0MzEtOC4xNjUzOCA5LjkxMDgzNC04LjE2NTM4IDkuODYzMDE0LTguMTY1MzhDOS42OTU2NDEtOC4xNjUzOCA5LjUxNjMxNC04LjE0MTQ2OSA5LjM0ODk0MS04LjE0MTQ2OUg4Ljc5OTAwNEM4LjQxNjQzOC04LjE0MTQ2OSA3Ljk5ODAwNy04LjE2NTM4IDcuNjI3Mzk3LTguMTY1MzhDNy41NDM3MTEtOC4xNjUzOCA3LjQwMDI0OS04LjE2NTM4IDcuNDAwMjQ5LTcuOTUwMTg3QzcuNDAwMjQ5LTcuODMwNjM1IDcuNDgzOTM1LTcuODE4NjggNy41NTU2NjYtNy44MTg2OEM3Ljc0Njk0OS03Ljc5NDc3IDcuOTUwMTg3LTcuNjk5MTI4IDcuOTUwMTg3LTcuNDcxOThMNy45MzgyMzItNy40NDgwN0M3LjkyNjI3Ni03LjM2NDM4NCA3LjkwMjM2Ni03LjI0NDgzMiA3Ljc3MDg1OS03LjEwMTM3TDUuNjc4NzA1LTQuODUzNzk4WicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMCcgeT0nMCcgeGxpbms6aHJlZj0nI2cyLTg4Jy8+Cjx1c2UgeD0nMTMuOTc1OTM3JyB5PScwJyB4bGluazpocmVmPScjZzMtNTgnLz4KPHVzZSB4PScyMC41NDg0MjgnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMy0xMCcvPgo8dXNlIHg9JzMxLjY1OTQxMScgeT0nMCcgeGxpbms6aHJlZj0nI2cxLTInLz4KPHVzZSB4PSc0My42MTQ1NzEnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMy05MScvPgo8dXNlIHg9JzQ2Ljg2NjIzMicgeT0nMCcgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PSc1Ni4xNjQ3MjknIHk9JzAnIHhsaW5rOmhyZWY9JyNnMy01MicvPgo8dXNlIHg9JzYyLjAxNzcyJyB5PScwJyB4bGluazpocmVmPScjZzItNTknLz4KPHVzZSB4PSc2Ny4yNjE4NzknIHk9JzAnIHhsaW5rOmhyZWY9JyNnMy01MicvPgo8dXNlIHg9JzczLjExNDg2OScgeT0nMCcgeGxpbms6aHJlZj0nI2czLTkzJy8+Cjx1c2UgeD0nNzkuNjg3MzU5JyB5PScwJyB4bGluazpocmVmPScjZzEtMzMnLz4KPHVzZSB4PSc5NC45NjMzOTEnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC04MicvPgo8L2c+Cjwvc3ZnPgo8IS0tIERFUFRIPTQgLS0+) with zero mean and
as covariance function.
We discretize the covariance model using
with zero mean and
as covariance function.
We discretize the covariance model using  for each
for each  .
We get a
.
We get a  fields from the process from which we
estimate the covariance model .
fields from the process from which we
estimate the covariance model .
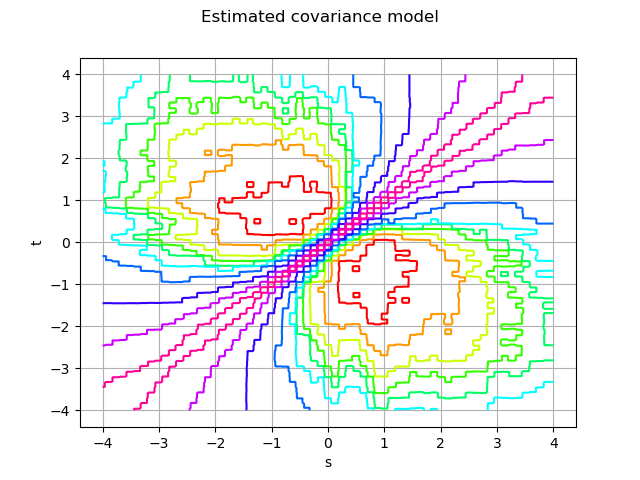
We use the object NonStationaryCovarianceModelFactory which creates a UserDefinedCovarianceModel.
import math as m
import openturns as ot
import openturns.viewer as viewer
from matplotlib import pylab as plt
ot.Log.Show(ot.Log.NONE)
Create the time grid
t0 = -4.0
tmax = 4.0
N = 64
dt = (tmax - t0) / N
tgrid = ot.RegularGrid(t0, dt, N)
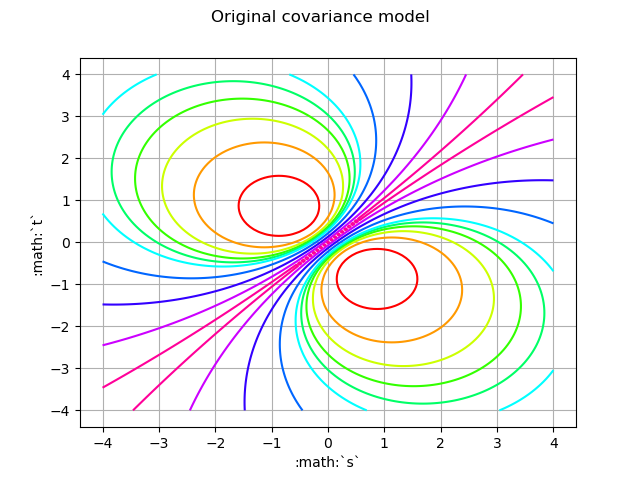
Create the covariance function at (s,t)
def C(s, t):
return m.exp(-4.0 * abs(s - t) / (1 + (s * s + t * t)))
Draw…
def f(X):
s, t = X
return [C(s, t)]
func = ot.PythonFunction(2, 1, f)
func.setDescription([":math:`s`", ":math:`t`", ":math:`cov`"])
graph = func.draw([t0] * 2, [tmax] * 2)
graph.setTitle("Original covariance model")
graph.setLegendPosition("")
view = viewer.View(graph)
Create data from a non stationary normal process Omega * [0,T]–> R
# Create the collection of HermitianMatrix
covariance = ot.CovarianceMatrix(N)
for k in range(N):
s = tgrid.getValue(k)
for ll in range(k + 1):
t = tgrid.getValue(ll)
covariance[k, ll] = C(s, t)
covmodel = ot.UserDefinedCovarianceModel(tgrid, covariance)
Create the normal process with that covariance model based on the mesh tgrid
process = ot.GaussianProcess(covmodel, tgrid)
# Get a sample of fields from the process
N = 1000
sample = process.getSample(N)
The covariance model factory
factory = ot.NonStationaryCovarianceModelFactory()
# Estimation on a sample
estimatedModel = factory.build(sample)
graph = estimatedModel.draw(0, 0, t0, tmax, 256, False)
graph.setTitle("Estimated covariance model")
graph.setLegendPosition("")
view = viewer.View(graph)
plt.show()