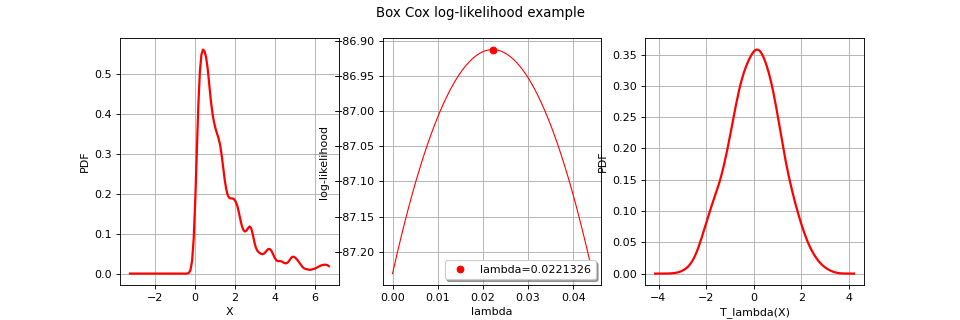
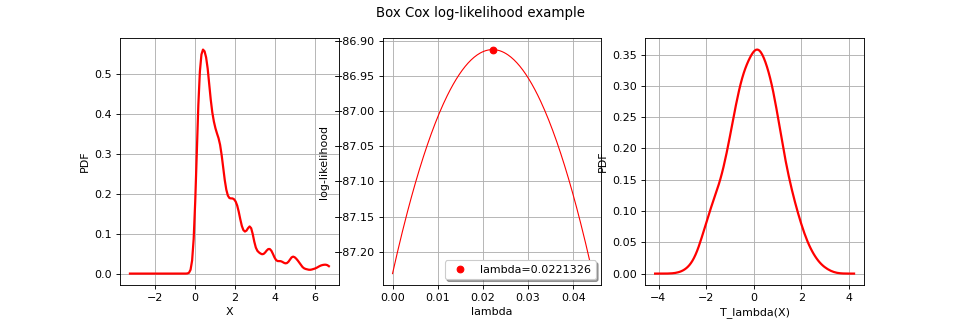
BoxCoxFactory¶
(Source code, png)
{kind=link}
- class BoxCoxFactory(*args)¶
BoxCox transformation estimator.
Notes
The class
BoxCoxFactoryenables to build a Box Cox transformation from data.The Box Cox transformation
 maps a sample into a new sample following a normal distribution with independent components. That sample may be the realization of a process as well as the realization of a distribution.
maps a sample into a new sample following a normal distribution with independent components. That sample may be the realization of a process as well as the realization of a distribution.In the multivariate case, we proceed component by component:
 which writes:
which writes:
for all
 .
.BoxCox transformation could alse be performed in the case of the estimation of a general linear model through
GeneralLinearModelAlgorithm. The objective is to estimate the most likely surrogate model (general linear model) which links input data and
and  .
.  are to be calibrated such as maximizing the general linear model’s likelihood function. In that context, a
are to be calibrated such as maximizing the general linear model’s likelihood function. In that context, a CovarianceModeland aBasishave to be fixedMethods
build(*args)Estimate the Box Cox transformation.
buildWithGLM(*args)Estimate the Box Cox transformation with general linear model.
buildWithGraph(*args)Estimate the Box Cox transformation with graph output.
buildWithLM(*args)Estimate the Box Cox transformation with linear model.
Accessor to the object's name.
getId()Accessor to the object's id.
getName()Accessor to the object's name.
Accessor to the solver.
Accessor to the object's shadowed id.
Accessor to the object's visibility state.
hasName()Test if the object is named.
Test if the object has a distinguishable name.
setName(name)Accessor to the object's name.
setOptimizationAlgorithm(solver)Accessor to the solver.
setShadowedId(id)Accessor to the object's shadowed id.
setVisibility(visible)Accessor to the object's visibility state.
- __init__(*args)¶
- build(*args)¶
Estimate the Box Cox transformation.
- Parameters:
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- transform
Notes
We describe the estimation in the univariate case, in the case of no surrogate model estimate. Only the parameter
 is estimated. To clarify the notations, we omit the mention of
is estimated. To clarify the notations, we omit the mention of  in
in  .
.We note
 a sample of
a sample of  . We suppose that
. We suppose that  .
.The parameters
 are estimated by the maximum likelihood estimators. We note
are estimated by the maximum likelihood estimators. We note  and
and  respectively the cumulative distribution function and the density probability function of the
respectively the cumulative distribution function and the density probability function of the  distribution.
distribution.We have :

from which we derive the density probability function p of
:
which enables to write the likelihood of the values
:![\begin{array}{lcl}
L(\beta,\sigma,\lambda)
& = &
\underbrace{ \frac{1}{(2\pi)^{N/2}}
\times
\frac{1}{(\sigma^2)^{N/2}}
\times
\exp\left[
-\frac{1}{2\sigma^2}
\sum_{k=0}^{N-1}
\left(
h_\lambda(x_k)-\beta
\right)^2
\right]
}_{\Psi(\beta, \sigma)}
\times
\prod_{k=0}^{N-1} x_k^{\lambda - 1}
\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMS4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzQwNy45MzI5MjFwdCcgaGVpZ2h0PSc1My41OTQ4MDNwdCcgdmlld0JveD0nNC45ODEzMiAtNTQuNzkwMzE3IDQwNy45MzI5MjEgNTMuNTk0ODAzJz4KPGRlZnM+CjxwYXRoIGlkPSdnMS0wJyBkPSdNNS41NzExMDgtMS44MDkyMTVDNS42OTg2My0xLjgwOTIxNSA1Ljg3Mzk3My0xLjgwOTIxNSA1Ljg3Mzk3My0xLjk5MjUyOFM1LjY5ODYzLTIuMTc1ODQxIDUuNTcxMTA4LTIuMTc1ODQxSDEuMDA0MjM0Qy44NzY3MTItMi4xNzU4NDEgLjcwMTM3LTIuMTc1ODQxIC43MDEzNy0xLjk5MjUyOFMuODc2NzEyLTEuODA5MjE1IDEuMDA0MjM0LTEuODA5MjE1SDUuNTcxMTA4WicvPgo8cGF0aCBpZD0nZzAtMzQnIGQ9J00zLjI4NzY3MSAzNS4zNzUzNDJINi44MjY0MDFWMzQuNjM0MTIySDQuMDI4ODkyVi4yNjMwMTRINi44MjY0MDFWLS40NzgyMDdIMy4yODc2NzFWMzUuMzc1MzQyWicvPgo8cGF0aCBpZD0nZzAtMzUnIGQ9J00yLjkyOTAxNiAzNC42MzQxMjJILjEzMTUwN1YzNS4zNzUzNDJIMy42NzAyMzdWLS40NzgyMDdILjEzMTUwN1YuMjYzMDE0SDIuOTI5MDE2VjM0LjYzNDEyMlonLz4KPHBhdGggaWQ9J2cwLTgxJyBkPSdNNC4yOTE5MDUgMTEuOTU1MTY4VjExLjQ3Njk2MUMzLjA2MDUyMyAxMS40NzY5NjEgMy4wNjA1MjMgMTAuODkxMTU4IDMuMDYwNTIzIDEwLjUzMjUwM1YuNDc4MjA3SDguMjEzMlYxMC41MzI1MDNDOC4yMTMyIDEwLjg5MTE1OCA4LjIxMzIgMTEuNDc2OTYxIDYuOTgxODE4IDExLjQ3Njk2MVYxMS45NTUxNjhIMTAuNjA0MjM0VjExLjQ3Njk2MUM5LjM3Mjg1MiAxMS40NzY5NjEgOS4zNzI4NTIgMTAuODkxMTU4IDkuMzcyODUyIDEwLjUzMjUwM1YxLjQyMjY2NUM5LjM3Mjg1MiAxLjA2NDAxIDkuMzcyODUyIC40NzgyMDcgMTAuNjA0MjM0IC40NzgyMDdWMEguNjY5NDg5Vi40NzgyMDdDMS45MDA4NzIgLjQ3ODIwNyAxLjkwMDg3MiAxLjA2NDAxIDEuOTAwODcyIDEuNDIyNjY1VjEwLjUzMjUwM0MxLjkwMDg3MiAxMC44OTExNTggMS45MDA4NzIgMTEuNDc2OTYxIC42Njk0ODkgMTEuNDc2OTYxVjExLjk1NTE2OEg0LjI5MTkwNVonLz4KPHBhdGggaWQ9J2cwLTg4JyBkPSdNMTUuMTM1MjQzIDE2LjczNzIzNUwxNi41ODE4MTggMTIuOTExNTgySDE2LjI4MjkzOUMxNS44MTY2ODcgMTQuMTU0OTE5IDE0LjU0OTQ0IDE0Ljk2Nzg3IDEzLjE3NDU5NSAxNS4zMjY1MjZDMTIuOTIzNTM3IDE1LjM4NjMwMSAxMS43NTE5MyAxNS42OTcxMzYgOS40NTY1MzggMTUuNjk3MTM2SDIuMjQ3NTcyTDguMzMyNzUyIDguNTU5OUM4LjQxNjQzOCA4LjQ2NDI1OSA4LjQ0MDM0OSA4LjQyODM5NCA4LjQ0MDM0OSA4LjM2ODYxOEM4LjQ0MDM0OSA4LjM0NDcwNyA4LjQ0MDM0OSA4LjMwODg0MiA4LjM1NjY2MyA4LjE4OTI5TDIuNzg1NTU0IC41NzM4NDhIOS4zMzY5ODZDMTAuOTM4OTc5IC41NzM4NDggMTIuMDI2ODk5IC43NDEyMiAxMi4xMzQ0OTYgLjc2NTEzMUMxMi43ODAwNzUgLjg2MDc3MiAxMy44MjAxNzQgMS4wNjQwMSAxNC43NjQ2MzMgMS42NjE3NjhDMTUuMDYzNTEyIDEuODUzMDUxIDE1Ljg3NjQ2MyAyLjM5MTAzNCAxNi4yODI5MzkgMy4zNTk0MDJIMTYuNTgxODE4TDE1LjEzNTI0MyAwSDEuMDA0MjM0Qy43MjkyNjUgMCAuNzE3MzEgLjAxMTk1NSAuNjgxNDQ1IC4wODM2ODZDLjY2OTQ4OSAuMTE5NTUyIC42Njk0ODkgLjM0NjcgLjY2OTQ4OSAuNDc4MjA3TDYuOTkzNzczIDkuMTMzNzQ4TC44MDA5OTYgMTYuMzkwNTM1Qy42ODE0NDUgMTYuNTMzOTk4IC42ODE0NDUgMTYuNTkzNzczIC42ODE0NDUgMTYuNjA1NzI5Qy42ODE0NDUgMTYuNzM3MjM1IC43ODkwNDEgMTYuNzM3MjM1IDEuMDA0MjM0IDE2LjczNzIzNUgxNS4xMzUyNDNaJy8+CjxwYXRoIGlkPSdnMC0xMjInIGQ9J001LjQ5OTM3Ny0xLjA5OTg3NUM1LjQ5OTM3Ny0xLjQyMjY2NSA1LjQ5OTM3Ny0xLjQzNDYyIDUuMjQ4MzE5LTEuNDM0NjJDNC4wMjg4OTItMS40MzQ2MiAxLjMzODk3OS0uODYwNzcyLS4yODY5MjQgMi4wNTYyODlWMi4yNDc1NzJDLS4yODY5MjQgMi41NDY0NTEtLjI3NDk2OSAyLjU1ODQwNiAwIDIuNTU4NDA2Qy4yMjcxNDggMi41NTg0MDYgLjIzOTEwMyAyLjU0NjQ1MSAuMjk4ODc5IDIuNDYyNzY1QzEuMjc5MjAzIC44OTY2MzggMi45MjkwMTYgLjA0NzgyMSA1LjM1NTkxNSAwQzUuNDk5Mzc3IDAgNS40OTkzNzctLjA4MzY4NiA1LjQ5OTM3Ny0uMzM0NzQ1Vi0xLjA5OTg3NVonLz4KPHBhdGggaWQ9J2cwLTEyMycgZD0nTTUuNjY2NzUgMi4wNTYyODlDNC4wNDA4NDctLjg3MjcyNyAxLjM1MDkzNC0xLjQzNDYyIC4xMzE1MDctMS40MzQ2MkMtLjExOTU1Mi0xLjQzNDYyLS4xMTk1NTItMS40MjI2NjUtLjExOTU1Mi0xLjA5OTg3NVYtLjMzNDc0NUMtLjExOTU1Mi0uMDU5Nzc2LS4xMTk1NTIgMCAuMDQ3ODIxIDBDLjc3NzA4NiAuMDExOTU1IDEuOTYwNjQ4IC4xMDc1OTcgMy4wMzY2MTMgLjYzMzYyNEM0LjMyNzc3MSAxLjI3OTIwMyA0LjgxNzkzMyAyLjAzMjM3OSA1LjExNjgxMiAyLjQ5ODYzQzUuMTUyNjc3IDIuNTU4NDA2IDUuMjI0NDA4IDIuNTU4NDA2IDUuMzc5ODI2IDIuNTU4NDA2QzUuNjU0Nzk1IDIuNTU4NDA2IDUuNjY2NzUgMi41NDY0NTEgNS42NjY3NSAyLjI0NzU3MlYyLjA1NjI4OVonLz4KPHBhdGggaWQ9J2cwLTEyNCcgZD0nTTUuNDk5Mzc3LTEuMDk5ODc1QzUuNDk5Mzc3LTEuMzc0ODQ0IDUuNDk5Mzc3LTEuNDM0NjIgNS4zMzIwMDUtMS40MzQ2MkM0LjYwMjc0LTEuNDQ2NTc1IDMuNDE5MTc4LTEuNTQyMjE3IDIuMzQzMjEzLTIuMDY4MjQ0QzEuMDUyMDU1LTIuNzEzODIzIC41NjE4OTMtMy40NjY5OTkgLjI2MzAxNC0zLjkzMzI1Qy4yMjcxNDgtMy45OTMwMjYgLjE1NTQxNy0zLjk5MzAyNiAwLTMuOTkzMDI2Qy0uMjc0OTY5LTMuOTkzMDI2LS4yODY5MjQtMy45ODEwNzEtLjI4NjkyNC0zLjY4MjE5MlYtMy40OTA5MDlDMS4zMzg5NzktLjU2MTg5MyA0LjAyODg5MiAwIDUuMjQ4MzE5IDBDNS40OTkzNzcgMCA1LjQ5OTM3Ny0uMDExOTU1IDUuNDk5Mzc3LS4zMzQ3NDVWLTEuMDk5ODc1WicvPgo8cGF0aCBpZD0nZzAtMTI1JyBkPSdNNS42NjY3NS0zLjY4MjE5MkM1LjY2Njc1LTMuOTgxMDcxIDUuNjU0Nzk1LTMuOTkzMDI2IDUuMzc5ODI2LTMuOTkzMDI2QzUuMTUyNjc3LTMuOTkzMDI2IDUuMTQwNzIyLTMuOTgxMDcxIDUuMDgwOTQ2LTMuODk3Mzg1QzQuMTAwNjIzLTIuMzMxMjU4IDIuNDUwODA5LTEuNDgyNDQxIC4wMjM5MS0xLjQzNDYyQy0uMTE5NTUyLTEuNDM0NjItLjExOTU1Mi0xLjM1MDkzNC0uMTE5NTUyLTEuMDk5ODc1Vi0uMzM0NzQ1Qy0uMTE5NTUyLS4wMTE5NTUtLjExOTU1MiAwIC4xMzE1MDcgMEMxLjM1MDkzNCAwIDQuMDQwODQ3LS41NzM4NDggNS42NjY3NS0zLjQ5MDkwOVYtMy42ODIxOTJaJy8+CjxwYXRoIGlkPSdnNS05JyBkPSdNMy42MDI0OTEtNC43OTAwMzdDMy42MDI0OTEtNS4wNjg5OTEgMy42MDI0OTEtNS4xODA1NzMgNC4zNTE2ODEtNS4xODA1NzNINC42MDY3MjVWLTUuNDQzNTg3QzQuMjQ4MDctNS40MTk2NzYgMy42NTAzMTEtNS40MTk2NzYgMy4yNjc3NDYtNS40MTk2NzZTMi4yNzk0NTItNS40MTk2NzYgMS45MjA3OTctNS40NDM1ODdWLTUuMTgwNTczSDIuMTc1ODQxQzIuOTI1MDMxLTUuMTgwNTczIDIuOTI1MDMxLTUuMDY4OTkxIDIuOTI1MDMxLTQuNzkwMDM3Vi0xLjMzODk3OUMxLjc5MzI3NS0xLjU5NDAyMiAxLjc1MzQyNS0yLjc4MTU2OSAxLjc1MzQyNS0zLjMyMzUzN0MxLjc1MzQyNS0zLjkxMzMyNSAxLjUzODIzMi00LjQyMzQxMiAuOTcyMzU0LTQuNDIzNDEySC43MDEzN0MuNTgxODE4LTQuNDIzNDEyIC40NzAyMzctNC40MjM0MTIgLjQ3MDIzNy00LjMxMTgzMUMuNDcwMjM3LTQuMjE2MTg5IC41NjU4NzgtNC4yMDAyNDkgLjU4OTc4OC00LjIwMDI0OUMxLjA2Nzk5NS00LjE0NDQ1OCAxLjA3NTk2NS0zLjQxOTE3OCAxLjA3NTk2NS0zLjM1NTQxN0MxLjA3NTk2NS0yLjg4NTE4MSAxLjA5MTkwNS0xLjMwNzA5OCAyLjkyNTAzMS0xLjA5MTkwNVYtLjY1MzU0OUMyLjkyNTAzMS0uMzc0NTk1IDIuOTI1MDMxLS4yNjMwMTQgMi4xNzU4NDEtLjI2MzAxNEgxLjkyMDc5N1YwQzIuMjc5NDUyLS4wMjM5MSAyLjg3NzIxLS4wMjM5MSAzLjI1OTc3Ni0uMDIzOTFTNC4yNDgwNy0uMDIzOTEgNC42MDY3MjUgMFYtLjI2MzAxNEg0LjM1MTY4MUMzLjYwMjQ5MS0uMjYzMDE0IDMuNjAyNDkxLS4zNzQ1OTUgMy42MDI0OTEtLjY1MzU0OVYtMS4wOTE5MDVDNS4yNDQzMzQtMS4yNTkyNzggNS40OTE0MDctMi41NzQzNDYgNS40OTkzNzctMy4xNDAyMjRDNS40OTkzNzctMy40NjY5OTkgNS41MDczNDctNC4xMzY0ODggNS45NjE2NDQtNC4yMDAyNDlDNi4wMjU0MDUtNC4yMDgyMTkgNi4xMDUxMDYtNC4yMTYxODkgNi4xMDUxMDYtNC4zMTE4MzFDNi4xMDUxMDYtNC40MjM0MTIgNi4wMDE0OTQtNC40MjM0MTIgNS44ODE5NDMtNC40MjM0MTJINS42MDI5ODlDNS4wMjExNzEtNC40MjM0MTIgNC44Mjk4ODgtMy45MzcyMzUgNC44MjE5MTgtMy4xODAwNzVDNC44MTM5NDgtMi40Mzg4NTQgNC41NjY4NzQtMS41MzAyNjIgMy42MDI0OTEtMS4zMzEwMDlWLTQuNzkwMDM3WicvPgo8cGF0aCBpZD0nZzUtNDAnIGQ9J00yLjY1NDA0NyAxLjk5MjUyOEMyLjcxNzgwOCAxLjk5MjUyOCAyLjgxMzQ1IDEuOTkyNTI4IDIuODEzNDUgMS44OTY4ODdDMi44MTM0NSAxLjg2NTAwNiAyLjgwNTQ3OSAxLjg1NzAzNiAyLjcwMTg2OCAxLjc1MzQyNUMxLjYwOTk2MyAuNzI1MjggMS4zMzg5NzktLjc1NzE2MSAxLjMzODk3OS0xLjk5MjUyOEMxLjMzODk3OS00LjI4NzkyIDIuMjg3NDIyLTUuMzYzODg1IDIuNjkzODk4LTUuNzMwNTExQzIuODA1NDc5LTUuODM0MTIyIDIuODEzNDUtNS44NDIwOTIgMi44MTM0NS01Ljg4MTk0M1MyLjc4MTU2OS01Ljk3NzU4NCAyLjcwMTg2OC01Ljk3NzU4NEMyLjU3NDM0Ni01Ljk3NzU4NCAyLjE3NTg0MS01LjU3MTEwOCAyLjExMjA4LTUuNDk5Mzc3QzEuMDQ0MDg1LTQuMzgzNTYyIC44MjA5MjItMi45NDg5NDEgLjgyMDkyMi0xLjk5MjUyOEMuODIwOTIyLS4yMDcyMjMgMS41NzAxMTIgMS4yMjczOTcgMi42NTQwNDcgMS45OTI1MjhaJy8+CjxwYXRoIGlkPSdnNS00MScgZD0nTTIuNDYyNzY1LTEuOTkyNTI4QzIuNDYyNzY1LTIuNzQ5Njg5IDIuMzM1MjQzLTMuNjU4MjgxIDEuODQxMDk2LTQuNTk4NzU1QzEuNDUwNTYtNS4zMzIwMDUgLjcyNTI4LTUuOTc3NTg0IC41ODE4MTgtNS45Nzc1ODRDLjUwMjExNy01Ljk3NzU4NCAuNDc4MjA3LTUuOTIxNzkzIC40NzgyMDctNS44ODE5NDNDLjQ3ODIwNy01Ljg1MDA2MiAuNDc4MjA3LTUuODM0MTIyIC41NzM4NDgtNS43Mzg0ODFDMS42ODk2NjQtNC42Nzg0NTYgMS45NDQ3MDctMy4yMTk5MjUgMS45NDQ3MDctMS45OTI1MjhDMS45NDQ3MDcgLjI5NDg5NCAuOTk2MjY0IDEuMzc4ODI5IC41ODk3ODggMS43NDU0NTVDLjQ4NjE3NyAxLjg0OTA2NiAuNDc4MjA3IDEuODU3MDM2IC40NzgyMDcgMS44OTY4ODdTLjUwMjExNyAxLjk5MjUyOCAuNTgxODE4IDEuOTkyNTI4Qy43MDkzNCAxLjk5MjUyOCAxLjEwNzg0NiAxLjU4NjA1MiAxLjE3MTYwNiAxLjUxNDMyMUMyLjIzOTYwMSAuMzk4NTA2IDIuNDYyNzY1LTEuMDM2MTE1IDIuNDYyNzY1LTEuOTkyNTI4WicvPgo8cGF0aCBpZD0nZzUtNDgnIGQ9J00zLjg5NzM4NS0yLjU0MjQ2NkMzLjg5NzM4NS0zLjM5NTI2OCAzLjgwOTcxNC0zLjkxMzMyNSAzLjU0NjctNC40MjM0MTJDMy4xOTYwMTUtNS4xMjQ3ODIgMi41NTA0MzYtNS4zMDAxMjUgMi4xMTIwOC01LjMwMDEyNUMxLjEwNzg0Ni01LjMwMDEyNSAuNzQxMjItNC41NTA5MzQgLjYyOTYzOS00LjMyNzc3MUMuMzQyNzE1LTMuNzQ1OTUzIC4zMjY3NzUtMi45NTY5MTIgLjMyNjc3NS0yLjU0MjQ2NkMuMzI2Nzc1LTIuMDE2NDM4IC4zNTA2ODUtMS4yMTE0NTcgLjczMzI1LS41NzM4NDhDMS4wOTk4NzUgLjAxNTk0IDEuNjg5NjY0IC4xNjczNzIgMi4xMTIwOCAuMTY3MzcyQzIuNDk0NjQ1IC4xNjczNzIgMy4xODAwNzUgLjA0NzgyMSAzLjU3ODU4LS43NDEyMkMzLjg3MzQ3NC0xLjMxNTA2OCAzLjg5NzM4NS0yLjAyNDQwOCAzLjg5NzM4NS0yLjU0MjQ2NlpNMi4xMTIwOC0uMDU1NzkxQzEuODQxMDk2LS4wNTU3OTEgMS4yOTExNTgtLjE4MzMxMyAxLjEyMzc4Ni0xLjAyMDE3NEMxLjAzNjExNS0xLjQ3NDQ3MSAxLjAzNjExNS0yLjIyMzY2MSAxLjAzNjExNS0yLjYzODEwN0MxLjAzNjExNS0zLjE4ODA0NSAxLjAzNjExNS0zLjc0NTk1MyAxLjEyMzc4Ni00LjE4NDMwOUMxLjI5MTE1OC00Ljk5NzI2IDEuOTEyODI3LTUuMDc2OTYxIDIuMTEyMDgtNS4wNzY5NjFDMi4zODMwNjQtNS4wNzY5NjEgMi45MzMwMDEtNC45NDE0NjkgMy4wOTI0MDMtNC4yMTYxODlDMy4xODgwNDUtMy43Nzc4MzMgMy4xODgwNDUtMy4xODAwNzUgMy4xODgwNDUtMi42MzgxMDdDMy4xODgwNDUtMi4xNjc4NyAzLjE4ODA0NS0xLjQ1MDU2IDMuMDkyNDAzLTEuMDA0MjM0QzIuOTI1MDMxLS4xNjczNzIgMi4zNzUwOTMtLjA1NTc5MSAyLjExMjA4LS4wNTU3OTFaJy8+CjxwYXRoIGlkPSdnNS00OScgZD0nTTIuNTAyNjE1LTUuMDc2OTYxQzIuNTAyNjE1LTUuMjkyMTU0IDIuNDg2Njc1LTUuMzAwMTI1IDIuMjcxNDgyLTUuMzAwMTI1QzEuOTQ0NzA3LTQuOTgxMzIgMS41MjIyOTEtNC43OTAwMzcgLjc2NTEzMS00Ljc5MDAzN1YtNC41MjcwMjRDLjk4MDMyNC00LjUyNzAyNCAxLjQxMDcxLTQuNTI3MDI0IDEuODcyOTc2LTQuNzQyMjE3Vi0uNjUzNTQ5QzEuODcyOTc2LS4zNTg2NTUgMS44NDkwNjYtLjI2MzAxNCAxLjA5MTkwNS0uMjYzMDE0SC44MTI5NTFWMEMxLjEzOTcyNi0uMDIzOTEgMS44MjUxNTYtLjAyMzkxIDIuMTgzODExLS4wMjM5MVMzLjIzNTg2Ni0uMDIzOTEgMy41NjI2NCAwVi0uMjYzMDE0SDMuMjgzNjg2QzIuNTI2NTI2LS4yNjMwMTQgMi41MDI2MTUtLjM1ODY1NSAyLjUwMjYxNS0uNjUzNTQ5Vi01LjA3Njk2MVonLz4KPHBhdGggaWQ9J2c1LTUwJyBkPSdNMi4yNDc1NzItMS42MjU5MDNDMi4zNzUwOTMtMS43NDU0NTUgMi43MDk4MzgtMi4wMDg0NjggMi44MzczNi0yLjEyMDA1QzMuMzMxNTA3LTIuNTc0MzQ2IDMuODAxNzQzLTMuMDEyNzAyIDMuODAxNzQzLTMuNzM3OTgzQzMuODAxNzQzLTQuNjg2NDI2IDMuMDA0NzMyLTUuMzAwMTI1IDIuMDA4NDY4LTUuMzAwMTI1QzEuMDUyMDU1LTUuMzAwMTI1IC40MjI0MTYtNC41NzQ4NDQgLjQyMjQxNi0zLjg2NTUwNEMuNDIyNDE2LTMuNDc0OTY5IC43MzMyNS0zLjQxOTE3OCAuODQ0ODMyLTMuNDE5MTc4QzEuMDEyMjA0LTMuNDE5MTc4IDEuMjU5Mjc4LTMuNTM4NzMgMS4yNTkyNzgtMy44NDE1OTRDMS4yNTkyNzgtNC4yNTYwNCAuODYwNzcyLTQuMjU2MDQgLjc2NTEzMS00LjI1NjA0Qy45OTYyNjQtNC44Mzc4NTggMS41MzAyNjItNS4wMzcxMTEgMS45MjA3OTctNS4wMzcxMTFDMi42NjIwMTctNS4wMzcxMTEgMy4wNDQ1ODMtNC40MDc0NzIgMy4wNDQ1ODMtMy43Mzc5ODNDMy4wNDQ1ODMtMi45MDkwOTEgMi40NjI3NjUtMi4zMDMzNjIgMS41MjIyOTEtMS4zMzg5NzlMLjUxODA1Ny0uMzAyODY0Qy40MjI0MTYtLjIxNTE5MyAuNDIyNDE2LS4xOTkyNTMgLjQyMjQxNiAwSDMuNTcwNjFMMy44MDE3NDMtMS40MjY2NUgzLjU1NDY3QzMuNTMwNzYtMS4yNjcyNDggMy40NjY5OTktLjg2ODc0MiAzLjM3MTM1Ny0uNzE3MzFDMy4zMjM1MzctLjY1MzU0OSAyLjcxNzgwOC0uNjUzNTQ5IDIuNTkwMjg2LS42NTM1NDlIMS4xNzE2MDZMMi4yNDc1NzItMS42MjU5MDNaJy8+CjxwYXRoIGlkPSdnNS02MScgZD0nTTUuODI2MTUyLTIuNjU0MDQ3QzUuOTQ1NzA0LTIuNjU0MDQ3IDYuMTA1MTA2LTIuNjU0MDQ3IDYuMTA1MTA2LTIuODM3MzZTNS45MTM4MjMtMy4wMjA2NzIgNS43OTQyNzEtMy4wMjA2NzJILjc4MTA3MUMuNjYxNTE5LTMuMDIwNjcyIC40NzAyMzctMy4wMjA2NzIgLjQ3MDIzNy0yLjgzNzM2Uy42Mjk2MzktMi42NTQwNDcgLjc0OTE5MS0yLjY1NDA0N0g1LjgyNjE1MlpNNS43OTQyNzEtLjk2NDM4NEM1LjkxMzgyMy0uOTY0Mzg0IDYuMTA1MTA2LS45NjQzODQgNi4xMDUxMDYtMS4xNDc2OTZTNS45NDU3MDQtMS4zMzEwMDkgNS44MjYxNTItMS4zMzEwMDlILjc0OTE5MUMuNjI5NjM5LTEuMzMxMDA5IC40NzAyMzctMS4zMzEwMDkgLjQ3MDIzNy0xLjE0NzY5NlMuNjYxNTE5LS45NjQzODQgLjc4MTA3MS0uOTY0Mzg0SDUuNzk0MjcxWicvPgo8cGF0aCBpZD0nZzMtMTInIGQ9J000Ljc4MjA2Ny00LjUzNDk5NEM0Ljc4MjA2Ny01LjI2MDI3NCA0LjE5MjI3OS01LjYxODkyOSAzLjUzMDc2LTUuNjE4OTI5QzIuNTAyNjE1LTUuNjE4OTI5IDEuNzM3NDg0LTQuNDU1MjkzIDEuNTE0MzIxLTMuNTc4NThMLjI1NTA0NCAxLjQ1MDU2Qy4yMzkxMDMgMS41MDYzNTEgLjMwMjg2NCAxLjU0NjIwMiAuMzUwNjg1IDEuNTQ2MjAyQy40MTQ0NDYgMS41NDYyMDIgLjQ3ODIwNyAxLjU0NjIwMiAuNDk0MTQ3IDEuNDkwNDExTDEuMDM2MTE1LS42NDU1NzlDMS4yMTk0MjctLjIxNTE5MyAxLjU5NDAyMiAuMDcxNzMxIDIuMTY3ODcgLjA3MTczMUMzLjI2Nzc0NiAuMDcxNzMxIDQuNDcxMjMzLS43MDkzNCA0LjQ3MTIzMy0xLjk3NjU4OEM0LjQ3MTIzMy0yLjUwMjYxNSA0LjI3MTk4LTIuODUzMyAzLjg3MzQ3NC0zLjE4MDA3NUMzLjkyMTI5NS0zLjE4ODA0NSA0LjA2NDc1Ny0zLjI5MTY1NiA0LjEwNDYwOC0zLjMyMzUzN0M0LjUwMzExMy0zLjU5NDUyMSA0Ljc4MjA2Ny00LjA0ODgxNyA0Ljc4MjA2Ny00LjUzNDk5NFpNMy4yMTE5NTUtMy4xODAwNzVDMy4wNjg0OTMtMy4xNTYxNjQgMi45MjUwMzEtMy4xNDAyMjQgMi43NzM1OTktMy4xNDAyMjRDMi42ODU5MjgtMy4xNDAyMjQgMi41OTgyNTctMy4xNDAyMjQgMi41MTA1ODUtMy4xNzIxMDVDMi42NjIwMTctMy4yMTE5NTUgMi44MjE0Mi0zLjIxMTk1NSAyLjk3Mjg1Mi0zLjIxMTk1NUMzLjA1MjU1My0zLjIxMTk1NSAzLjEzMjI1NC0zLjIwMzk4NSAzLjIxMTk1NS0zLjE4MDA3NVpNNC4yNzk5NS00LjY4NjQyNkM0LjI3OTk1LTQuMjg3OTIgNC4xMDQ2MDgtMy44MTc2ODQgMy44MjU2NTQtMy41Mzg3M0MzLjc4NTgwMy0zLjQ5ODg3OSAzLjYxODQzMS0zLjM0NzQ0NyAzLjU3MDYxLTMuMzM5NDc3QzMuMzQ3NDQ3LTMuMzc5MzI4IDMuMTcyMTA1LTMuNDM1MTE4IDIuOTQwOTcxLTMuNDM1MTE4QzIuNzMzNzQ4LTMuNDM1MTE4IDIuMjMxNjMxLTMuNDUxMDU5IDIuMjMxNjMxLTMuMTQwMjI0QzIuMjMxNjMxLTIuOTAxMTIxIDIuNjg1OTI4LTIuOTE3MDYxIDIuODQ1MzMtMi45MTcwNjFDMy4wOTI0MDMtMi45MTcwNjEgMy4zMjM1MzctMi45NDA5NzEgMy41NTQ2Ny0zLjAyODY0M0MzLjc5Mzc3My0yLjgzNzM2IDMuOTEzMzI1LTIuNTgyMzE2IDMuOTEzMzI1LTIuMTgzODExQzMuOTEzMzI1LTEuNzEzNTc0IDMuNzUzOTIzLTEuMTg3NTQ3IDMuNTIyNzktLjg2ODc0MkMzLjIyNzg5NS0uNDQ2MzI2IDIuNzMzNzQ4LS4xNTE0MzIgMi4xMzU5OS0uMTUxNDMyQzEuNjA5OTYzLS4xNTE0MzIgMS4xOTU1MTctLjU1NzkwOCAxLjE5NTUxNy0xLjExNTgxNkMxLjE5NTUxNy0xLjIxOTQyNyAxLjIwMzQ4Ny0xLjMyMzAzOSAxLjIyNzM5Ny0xLjQwMjc0TDEuNzUzNDI1LTMuNTIyNzlDMS45Mjg3NjctNC4yMjQxNTkgMi42MDYyMjctNS4zOTU3NjYgMy40OTg4NzktNS4zOTU3NjZDMy45MDUzNTUtNS4zOTU3NjYgNC4yNzk5NS01LjE5NjUxMyA0LjI3OTk1LTQuNjg2NDI2WicvPgo8cGF0aCBpZD0nZzMtMjEnIGQ9J00yLjk5Njc2Mi0yLjI4NzQyMkMzLjI5MTY1Ni0xLjU2MjE0MiAzLjc3NzgzMy0uMjYzMDE0IDMuODY1NTA0LS4xMTk1NTJDNC4wMDA5OTYgLjA3OTcwMSA0LjE2MDM5OSAuMDc5NzAxIDQuMzUxNjgxIC4wNzk3MDFDNC41ODI4MTQgLjA3OTcwMSA0LjY0NjU3NSAuMDc5NzAxIDQuNjQ2NTc1LS4wMTU5NEM0LjY0NjU3NS0uMDU1NzkxIDQuNjMwNjM1LS4wNzk3MDEgNC41OTg3NTUtLjEwMzYxMUM0LjUwMzExMy0uMjE1MTkzIDQuNDYzMjYzLS4yOTQ4OTQgNC40MDc0NzItLjQ0NjMyNkwyLjYxNDE5Ny00Ljk5NzI2QzIuNTU4NDA2LTUuMTQ4NjkyIDIuNDA2OTc0LTUuNTMxMjU4IDEuNTg2MDUyLTUuNTMxMjU4QzEuNTA2MzUxLTUuNTMxMjU4IDEuMzg2OC01LjUzMTI1OCAxLjM4NjgtNS40MTk2NzZDMS4zODY4LTUuMzI0MDM1IDEuNDY2NTAxLTUuMzE2MDY1IDEuNTA2MzUxLTUuMzA4MDk1QzEuNjY1NzUzLTUuMjg0MTg0IDEuODE3MTg2LTUuMjY4MjQ0IDIuMDAwNDk4LTQuODA1OTc4TDIuNTc0MzQ2LTMuMzcxMzU3TDIuODg1MTgxLTIuNTY2Mzc2TC42MDU3MjktLjQ1NDI5NkMuNTE4MDU3LS4zNzQ1OTUgLjQzODM1Ni0uMjc4OTU0IC40MzgzNTYtLjE2NzM3MkMuNDM4MzU2LS4wMDc5NyAuNTczODQ4IC4wOTU2NDEgLjcwOTM0IC4wOTU2NDFDLjgyMDkyMiAuMDk1NjQxIC45MzI1MDMgLjAwNzk3IDEuMDA0MjM0LS4wNzE3MzFMMi45OTY3NjItMi4yODc0MjJaJy8+CjxwYXRoIGlkPSdnMy0yNycgZD0nTTQuMzc1NTkyLTIuOTA5MDkxQzQuNTE5MDU0LTIuOTA5MDkxIDQuNTc0ODQ0LTIuOTA5MDkxIDQuNjcwNDg2LTIuOTcyODUyQzQuNzU4MTU3LTMuMDQ0NTgzIDQuNzkwMDM3LTMuMTU2MTY0IDQuNzkwMDM3LTMuMjExOTU1QzQuNzkwMDM3LTMuNDM1MTE4IDQuNTkwNzg1LTMuNDM1MTE4IDQuNDU1MjkzLTMuNDM1MTE4SDIuNDk0NjQ1QzEuMjY3MjQ4LTMuNDM1MTE4IC4zMjY3NzUtMi4xNzU4NDEgLjMyNjc3NS0xLjIxMTQ1N0MuMzI2Nzc1LS40MzAzODYgLjg4NDY4MiAuMDc5NzAxIDEuNjI1OTAzIC4wNzk3MDFDMi42MzAxMzcgLjA3OTcwMSAzLjcyMjA0Mi0uODg0NjgyIDMuNzIyMDQyLTIuMDcyMjI5QzMuNzIyMDQyLTIuNTAyNjE1IDMuNTcwNjEtMi43NTc2NTkgMy40ODI5MzktMi45MDkwOTFINC4zNzU1OTJaTTEuNjMzODczLS4xNDM0NjJDMS4yMzUzNjctLjE0MzQ2MiAuODg0NjgyLS40MDY0NzYgLjg4NDY4Mi0uOTg4Mjk0Qy44ODQ2ODItMS4zMjMwMzkgMS4wODM5MzUtMi45MDkwOTEgMi4zNjcxMjMtMi45MDkwOTFDMy4xNDAyMjQtMi45MDkwOTEgMy4xNDAyMjQtMi4zMTkzMDMgMy4xNDAyMjQtMi4xNTE5M0MzLjE0MDIyNC0xLjMzMTAwOSAyLjU3NDM0Ni0uMTQzNDYyIDEuNjMzODczLS4xNDM0NjJaJy8+CjxwYXRoIGlkPSdnMy01OScgZD0nTTEuNDkwNDExLS4xMTk1NTJDMS40OTA0MTEgLjM5ODUwNiAxLjM3ODgyOSAuODUyODAyIC44ODQ2ODIgMS4zNDY5NDlDLjg1MjgwMiAxLjM3MDg1OSAuODM2ODYyIDEuMzg2OCAuODM2ODYyIDEuNDI2NjVDLjgzNjg2MiAxLjQ5MDQxMSAuOTAwNjIzIDEuNTM4MjMyIC45NTY0MTMgMS41MzgyMzJDMS4wNTIwNTUgMS41MzgyMzIgMS43MTM1NzQgLjkwODU5MyAxLjcxMzU3NC0uMDIzOTFDMS43MTM1NzQtLjUzMzk5OCAxLjUyMjI5MS0uODg0NjgyIDEuMTcxNjA2LS44ODQ2ODJDLjg5MjY1My0uODg0NjgyIC43MzMyNS0uNjYxNTE5IC43MzMyNS0uNDQ2MzI2Qy43MzMyNS0uMjIzMTYzIC44ODQ2ODIgMCAxLjE3OTU3NyAwQzEuMzcwODU5IDAgMS40OTA0MTEtLjExMTU4MiAxLjQ5MDQxMS0uMTE5NTUyWicvPgo8cGF0aCBpZD0nZzMtNjEnIGQ9J00zLjcwNjEwMi01LjY0MjgzOUMzLjc1MzkyMy01Ljc1NDQyMSAzLjc1MzkyMy01Ljc3MDM2MSAzLjc1MzkyMy01Ljc5NDI3MUMzLjc1MzkyMy01Ljg5Nzg4MyAzLjY3NDIyMi01Ljk3NzU4NCAzLjU3MDYxLTUuOTc3NTg0QzMuNDQzMDg4LTUuOTc3NTg0IDMuNDExMjA4LTUuODgxOTQzIDMuMzc5MzI4LTUuODAyMjQyTC41MTgwNTcgMS42NTc3ODNDLjQ3MDIzNyAxLjc2OTM2NSAuNDcwMjM3IDEuNzg1MzA1IC40NzAyMzcgMS44MDkyMTVDLjQ3MDIzNyAxLjkxMjgyNyAuNTQ5OTM4IDEuOTkyNTI4IC42NTM1NDkgMS45OTI1MjhDLjc4MTA3MSAxLjk5MjUyOCAuODEyOTUxIDEuODk2ODg3IC44NDQ4MzIgMS44MTcxODZMMy43MDYxMDItNS42NDI4MzlaJy8+CjxwYXRoIGlkPSdnMy03OCcgZD0nTTYuMzEyMzI5LTQuNTc0ODQ0QzYuNDA3OTctNC45NjUzOCA2LjU4MzMxMy01LjE1NjY2MyA3LjE1NzE2MS01LjE4MDU3M0M3LjIzNjg2Mi01LjE4MDU3MyA3LjMwMDYyMy01LjIyODM5NCA3LjMwMDYyMy01LjMzMjAwNUM3LjMwMDYyMy01LjM3OTgyNiA3LjI2MDc3Mi01LjQ0MzU4NyA3LjE4MTA3MS01LjQ0MzU4N0M3LjEyNTI4LTUuNDQzNTg3IDYuOTczODQ4LTUuNDE5Njc2IDYuMzg0MDYtNS40MTk2NzZDNS43NDY0NTEtNS40MTk2NzYgNS42NDI4MzktNS40NDM1ODcgNS41NzExMDgtNS40NDM1ODdDNS40NDM1ODctNS40NDM1ODcgNS40MTk2NzYtNS4zNTU5MTUgNS40MTk2NzYtNS4yOTIxNTRDNS40MTk2NzYtNS4xODg1NDMgNS41MjMyODgtNS4xODA1NzMgNS41OTUwMTktNS4xODA1NzNDNi4wODExOTYtNS4xNjQ2MzMgNi4wODExOTYtNC45NDk0NCA2LjA4MTE5Ni00LjgzNzg1OEM2LjA4MTE5Ni00Ljc5ODAwNyA2LjA4MTE5Ni00Ljc1ODE1NyA2LjA0OTMxNS00LjYzMDYzNUw1LjE3MjYwMy0xLjEzOTcyNkwzLjI1MTgwNi01LjMwMDEyNUMzLjE4ODA0NS01LjQ0MzU4NyAzLjE3MjEwNS01LjQ0MzU4NyAyLjk4MDgyMi01LjQ0MzU4N0gxLjk0NDcwN0MxLjgwMTI0NS01LjQ0MzU4NyAxLjY5NzYzNC01LjQ0MzU4NyAxLjY5NzYzNC01LjI5MjE1NEMxLjY5NzYzNC01LjE4MDU3MyAxLjc5MzI3NS01LjE4MDU3MyAxLjk2MDY0OC01LjE4MDU3M0MyLjAyNDQwOC01LjE4MDU3MyAyLjI2MzUxMi01LjE4MDU3MyAyLjQ0NjgyNC01LjEzMjc1MkwxLjM3ODgyOS0uODUyODAyQzEuMjgzMTg4LS40NTQyOTYgMS4wNzU5NjUtLjI3ODk1NCAuNTQxOTY4LS4yNjMwMTRDLjQ5NDE0Ny0uMjYzMDE0IC4zOTg1MDYtLjI1NTA0NCAuMzk4NTA2LS4xMTE1ODJDLjM5ODUwNi0uMDYzNzYxIC40MzgzNTYgMCAuNTE4MDU3IDBDLjU0OTkzOCAwIC43MzMyNS0uMDIzOTEgMS4zMDcwOTgtLjAyMzkxQzEuOTM2NzM3LS4wMjM5MSAyLjA1NjI4OSAwIDIuMTI4MDIgMEMyLjE1OTkgMCAyLjI3OTQ1MiAwIDIuMjc5NDUyLS4xNTE0MzJDMi4yNzk0NTItLjI0NzA3MyAyLjE5MTc4MS0uMjYzMDE0IDIuMTM1OTktLjI2MzAxNEMxLjg0OTA2Ni0uMjcwOTg0IDEuNjA5OTYzLS4zMTg4MDQgMS42MDk5NjMtLjU5Nzc1OEMxLjYwOTk2My0uNjM3NjA5IDEuNjMzODczLS43NDkxOTEgMS42MzM4NzMtLjc1NzE2MUwyLjY3Nzk1OC00LjkxNzU1OUgyLjY4NTkyOEw0LjkwMTYxOS0uMTQzNDYyQzQuOTU3NDEtLjAxNTk0IDQuOTY1MzggMCA1LjA1MzA1MSAwQzUuMTY0NjMzIDAgNS4xNzI2MDMtLjAzMTg4IDUuMjA0NDgzLS4xNjczNzJMNi4zMTIzMjktNC41NzQ4NDRaJy8+CjxwYXRoIGlkPSdnMy0xMDcnIGQ9J00yLjMyNzI3My01LjI5MjE1NEMyLjMzNTI0My01LjMwODA5NSAyLjM1OTE1My01LjQxMTcwNiAyLjM1OTE1My01LjQxOTY3NkMyLjM1OTE1My01LjQ1OTUyNyAyLjMyNzI3My01LjUzMTI1OCAyLjIzMTYzMS01LjUzMTI1OEMyLjE5OTc1MS01LjUzMTI1OCAxLjk1MjY3Ny01LjUwNzM0NyAxLjc2OTM2NS01LjQ5MTQwN0wxLjMyMzAzOS01LjQ1OTUyN0MxLjE0NzY5Ni01LjQ0MzU4NyAxLjA2Nzk5NS01LjQzNTYxNiAxLjA2Nzk5NS01LjI5MjE1NEMxLjA2Nzk5NS01LjE4MDU3MyAxLjE3OTU3Ny01LjE4MDU3MyAxLjI3NTIxOC01LjE4MDU3M0MxLjY1Nzc4My01LjE4MDU3MyAxLjY1Nzc4My01LjEzMjc1MiAxLjY1Nzc4My01LjA2MTAyMUMxLjY1Nzc4My01LjAzNzExMSAxLjY1Nzc4My01LjAyMTE3MSAxLjYxNzkzMy00Ljg3NzcwOUwuNDg2MTc3LS4zNDI3MTVDLjQ1NDI5Ni0uMjIzMTYzIC40NTQyOTYtLjE3NTM0MiAuNDU0Mjk2LS4xNjczNzJDLjQ1NDI5Ni0uMDMxODggLjU2NTg3OCAuMDc5NzAxIC43MTczMSAuMDc5NzAxQy45ODgyOTQgLjA3OTcwMSAxLjA1MjA1NS0uMTc1MzQyIDEuMDgzOTM1LS4yODY5MjRDMS4xNjM2MzYtLjYyMTY2OSAxLjM3MDg1OS0xLjQ2NjUwMSAxLjQ1ODUzMS0xLjgwMTI0NUMxLjg5Njg4Ny0xLjc1MzQyNSAyLjQzMDg4NC0xLjYwMTk5MyAyLjQzMDg4NC0xLjE0NzY5NkMyLjQzMDg4NC0xLjEwNzg0NiAyLjQzMDg4NC0xLjA2Nzk5NSAyLjQxNDk0NC0uOTg4Mjk0QzIuMzkxMDM0LS44ODQ2ODIgMi4zNzUwOTMtLjc3MzEwMSAyLjM3NTA5My0uNzMzMjVDMi4zNzUwOTMtLjI2MzAxNCAyLjcyNTc3OCAuMDc5NzAxIDMuMTg4MDQ1IC4wNzk3MDFDMy41MjI3OSAuMDc5NzAxIDMuNzMwMDEyLS4xNjczNzIgMy44MzM2MjQtLjMxODgwNEM0LjAyNDkwNy0uNjEzNjk5IDQuMTUyNDI4LTEuMDkxOTA1IDQuMTUyNDI4LTEuMTM5NzI2QzQuMTUyNDI4LTEuMjE5NDI3IDQuMDg4NjY3LTEuMjQzMzM3IDQuMDMyODc3LTEuMjQzMzM3QzMuOTM3MjM1LTEuMjQzMzM3IDMuOTIxMjk1LTEuMTk1NTE3IDMuODg5NDE1LTEuMDUyMDU1QzMuNzg1ODAzLS42Nzc0NiAzLjU3ODU4LS4xNDM0NjIgMy4yMDM5ODUtLjE0MzQ2MkMyLjk5Njc2Mi0uMTQzNDYyIDIuOTQ4OTQxLS4zMTg4MDQgMi45NDg5NDEtLjUzMzk5OEMyLjk0ODk0MS0uNjM3NjA5IDIuOTU2OTEyLS43MzMyNSAyLjk5Njc2Mi0uOTE2NTYzQzMuMDA0NzMyLS45NDg0NDMgMy4wMzY2MTMtMS4wNzU5NjUgMy4wMzY2MTMtMS4xNjM2MzZDMy4wMzY2MTMtMS44MTcxODYgMi4yMTU2OTEtMS45NjA2NDggMS44MDkyMTUtMi4wMTY0MzhDMi4xMDQxMS0yLjE5MTc4MSAyLjM3NTA5My0yLjQ2Mjc2NSAyLjQ3MDczNS0yLjU2NjM3NkMyLjkwOTA5MS0yLjk5Njc2MiAzLjI2Nzc0Ni0zLjI5MTY1NiAzLjY1MDMxMS0zLjI5MTY1NkMzLjc1MzkyMy0zLjI5MTY1NiAzLjg0OTU2NC0zLjI2Nzc0NiAzLjkxMzMyNS0zLjE4ODA0NUMzLjQ4MjkzOS0zLjEzMjI1NCAzLjQ4MjkzOS0yLjc1NzY1OSAzLjQ4MjkzOS0yLjc0OTY4OUMzLjQ4MjkzOS0yLjU3NDM0NiAzLjYxODQzMS0yLjQ1NDc5NSAzLjc5Mzc3My0yLjQ1NDc5NUM0LjAwODk2Ni0yLjQ1NDc5NSA0LjI0ODA3LTIuNjMwMTM3IDQuMjQ4MDctMi45NTY5MTJDNC4yNDgwNy0zLjIyNzg5NSA0LjA1Njc4Ny0zLjUxNDgxOSAzLjY1ODI4MS0zLjUxNDgxOUMzLjE5NjAxNS0zLjUxNDgxOSAyLjc4MTU2OS0zLjE2NDEzNCAyLjMyNzI3My0yLjcwOTgzOEMxLjg2NTAwNi0yLjI1NTU0MiAxLjY2NTc1My0yLjE2Nzg3IDEuNTM4MjMyLTIuMTEyMDhMMi4zMjcyNzMtNS4yOTIxNTRaJy8+CjxwYXRoIGlkPSdnNi00MCcgZD0nTTMuODg1NDMgMi45MDUxMDZDMy44ODU0MyAyLjg2OTI0IDMuODg1NDMgMi44NDUzMyAzLjY4MjE5MiAyLjY0MjA5MkMyLjQ4NjY3NSAxLjQzNDYyIDEuODE3MTg2LS41Mzc5ODMgMS44MTcxODYtMi45NzY4MzdDMS44MTcxODYtNS4yOTYxMzkgMi4zNzkwNzgtNy4yOTI2NTMgMy43NjU4NzgtOC43MDMzNjJDMy44ODU0My04LjgxMDk1OSAzLjg4NTQzLTguODM0ODY5IDMuODg1NDMtOC44NzA3MzVDMy44ODU0My04Ljk0MjQ2NiAzLjgyNTY1NC04Ljk2NjM3NiAzLjc3NzgzMy04Ljk2NjM3NkMzLjYyMjQxNi04Ljk2NjM3NiAyLjY0MjA5Mi04LjEwNTYwNCAyLjA1NjI4OS02LjkzMzk5OEMxLjQ0NjU3NS01LjcyNjUyNiAxLjE3MTYwNi00LjQ0NzMyMyAxLjE3MTYwNi0yLjk3NjgzN0MxLjE3MTYwNi0xLjkxMjgyNyAxLjMzODk3OS0uNDkwMTYyIDEuOTYwNjQ4IC43ODkwNDFDMi42NjYwMDIgMi4yMjM2NjEgMy42NDYzMjYgMy4wMDA3NDcgMy43Nzc4MzMgMy4wMDA3NDdDMy44MjU2NTQgMy4wMDA3NDcgMy44ODU0MyAyLjk3NjgzNyAzLjg4NTQzIDIuOTA1MTA2WicvPgo8cGF0aCBpZD0nZzYtNDEnIGQ9J00zLjM3MTM1Ny0yLjk3NjgzN0MzLjM3MTM1Ny0zLjg4NTQzIDMuMjUxODA2LTUuMzY3ODcgMi41ODIzMTYtNi43NTQ2N0MxLjg3Njk2MS04LjE4OTI5IC44OTY2MzgtOC45NjYzNzYgLjc2NTEzMS04Ljk2NjM3NkMuNzE3MzEtOC45NjYzNzYgLjY1NzUzNC04Ljk0MjQ2NiAuNjU3NTM0LTguODcwNzM1Qy42NTc1MzQtOC44MzQ4NjkgLjY1NzUzNC04LjgxMDk1OSAuODYwNzcyLTguNjA3NzIxQzIuMDU2Mjg5LTcuNDAwMjQ5IDIuNzI1Nzc4LTUuNDI3NjQ2IDIuNzI1Nzc4LTIuOTg4NzkyQzIuNzI1Nzc4LS42Njk0ODkgMi4xNjM4ODUgMS4zMjcwMjQgLjc3NzA4NiAyLjczNzczM0MuNjU3NTM0IDIuODQ1MzMgLjY1NzUzNCAyLjg2OTI0IC42NTc1MzQgMi45MDUxMDZDLjY1NzUzNCAyLjk3NjgzNyAuNzE3MzEgMy4wMDA3NDcgLjc2NTEzMSAzLjAwMDc0N0MuOTIwNTQ4IDMuMDAwNzQ3IDEuOTAwODcyIDIuMTM5OTc1IDIuNDg2Njc1IC45NjgzNjlDMy4wOTYzODktLjI1MTA1OSAzLjM3MTM1Ny0xLjU0MjIxNyAzLjM3MTM1Ny0yLjk3NjgzN1onLz4KPHBhdGggaWQ9J2c2LTQ5JyBkPSdNMy40NDMwODgtNy42NjMyNjNDMy40NDMwODgtNy45MzgyMzIgMy40NDMwODgtNy45NTAxODcgMy4yMDM5ODUtNy45NTAxODdDMi45MTcwNjEtNy42MjczOTcgMi4zMTkzMDMtNy4xODUwNTYgMS4wODc5Mi03LjE4NTA1NlYtNi44MzgzNTZDMS4zNjI4ODktNi44MzgzNTYgMS45NjA2NDgtNi44MzgzNTYgMi42MTgxODItNy4xNDkxOTFWLS45MjA1NDhDMi42MTgxODItLjQ5MDE2MiAyLjU4MjMxNi0uMzQ2NyAxLjUzMDI2Mi0uMzQ2N0gxLjE1OTY1MVYwQzEuNDgyNDQxLS4wMjM5MSAyLjY0MjA5Mi0uMDIzOTEgMy4wMzY2MTMtLjAyMzkxUzQuNTc4ODI5LS4wMjM5MSA0LjkwMTYxOSAwVi0uMzQ2N0g0LjUzMTAwOUMzLjQ3ODk1NC0uMzQ2NyAzLjQ0MzA4OC0uNDkwMTYyIDMuNDQzMDg4LS45MjA1NDhWLTcuNjYzMjYzWicvPgo8cGF0aCBpZD0nZzYtNTAnIGQ9J001LjI2MDI3NC0yLjAwODQ2OEg0Ljk5NzI2QzQuOTYxMzk1LTEuODA1MjMgNC44NjU3NTMtMS4xNDc2OTYgNC43NDYyMDItLjk1NjQxM0M0LjY2MjUxNi0uODQ4ODE3IDMuOTgxMDcxLS44NDg4MTcgMy42MjI0MTYtLjg0ODgxN0gxLjQxMDcxQzEuNzMzNDk5LTEuMTIzNzg2IDIuNDYyNzY1LTEuODg4OTE3IDIuNzczNTk5LTIuMTc1ODQxQzQuNTkwNzg1LTMuODQ5NTY0IDUuMjYwMjc0LTQuNDcxMjMzIDUuMjYwMjc0LTUuNjU0Nzk1QzUuMjYwMjc0LTcuMDI5NjM5IDQuMTcyMzU0LTcuOTUwMTg3IDIuNzg1NTU0LTcuOTUwMTg3Uy41ODU4MDMtNi43NjY2MjUgLjU4NTgwMy01LjczODQ4MUMuNTg1ODAzLTUuMTI4NzY3IDEuMTExODMxLTUuMTI4NzY3IDEuMTQ3Njk2LTUuMTI4NzY3QzEuMzk4NzU1LTUuMTI4NzY3IDEuNzA5NTg5LTUuMzA4MDk1IDEuNzA5NTg5LTUuNjkwNjZDMS43MDk1ODktNi4wMjU0MDUgMS40ODI0NDEtNi4yNTI1NTMgMS4xNDc2OTYtNi4yNTI1NTNDMS4wNDAxLTYuMjUyNTUzIDEuMDE2MTg5LTYuMjUyNTUzIC45ODAzMjQtNi4yNDA1OThDMS4yMDc0NzItNy4wNTM1NDkgMS44NTMwNTEtNy42MDM0ODcgMi42MzAxMzctNy42MDM0ODdDMy42NDYzMjYtNy42MDM0ODcgNC4yNjc5OTUtNi43NTQ2NyA0LjI2Nzk5NS01LjY1NDc5NUM0LjI2Nzk5NS00LjYzODYwNSAzLjY4MjE5Mi0zLjc1MzkyMyAzLjAwMDc0Ny0yLjk4ODc5MkwuNTg1ODAzLS4yODY5MjRWMEg0Ljk0OTQ0TDUuMjYwMjc0LTIuMDA4NDY4WicvPgo8cGF0aCBpZD0nZzYtNjEnIGQ9J004LjA2OTczOC0zLjg3MzQ3NEM4LjIzNzExMS0zLjg3MzQ3NCA4LjQ1MjMwNC0zLjg3MzQ3NCA4LjQ1MjMwNC00LjA4ODY2N0M4LjQ1MjMwNC00LjMxNTgxNiA4LjI0OTA2Ni00LjMxNTgxNiA4LjA2OTczOC00LjMxNTgxNkgxLjAyODE0NEMuODYwNzcyLTQuMzE1ODE2IC42NDU1NzktNC4zMTU4MTYgLjY0NTU3OS00LjEwMDYyM0MuNjQ1NTc5LTMuODczNDc0IC44NDg4MTctMy44NzM0NzQgMS4wMjgxNDQtMy44NzM0NzRIOC4wNjk3MzhaTTguMDY5NzM4LTEuNjQ5ODEzQzguMjM3MTExLTEuNjQ5ODEzIDguNDUyMzA0LTEuNjQ5ODEzIDguNDUyMzA0LTEuODY1MDA2QzguNDUyMzA0LTIuMDkyMTU0IDguMjQ5MDY2LTIuMDkyMTU0IDguMDY5NzM4LTIuMDkyMTU0SDEuMDI4MTQ0Qy44NjA3NzItMi4wOTIxNTQgLjY0NTU3OS0yLjA5MjE1NCAuNjQ1NTc5LTEuODc2OTYxQy42NDU1NzktMS42NDk4MTMgLjg0ODgxNy0xLjY0OTgxMyAxLjAyODE0NC0xLjY0OTgxM0g4LjA2OTczOFonLz4KPHBhdGggaWQ9J2c2LTEwMScgZD0nTTQuNTc4ODI5LTIuNzczNTk5QzQuODQxODQzLTIuNzczNTk5IDQuODY1NzUzLTIuNzczNTk5IDQuODY1NzUzLTMuMDAwNzQ3QzQuODY1NzUzLTQuMjA4MjE5IDQuMjIwMTc0LTUuMzMyMDA1IDIuNzczNTk5LTUuMzMyMDA1QzEuNDEwNzEtNS4zMzIwMDUgLjM1ODY1NS00LjEwMDYyMyAuMzU4NjU1LTIuNjE4MTgyQy4zNTg2NTUtMS4wNDAxIDEuNTc4MDgyIC4xMTk1NTIgMi45MDUxMDYgLjExOTU1MkM0LjMyNzc3MSAuMTE5NTUyIDQuODY1NzUzLTEuMTcxNjA2IDQuODY1NzUzLTEuNDIyNjY1QzQuODY1NzUzLTEuNDk0Mzk2IDQuODA1OTc4LTEuNTQyMjE3IDQuNzM0MjQ3LTEuNTQyMjE3QzQuNjM4NjA1LTEuNTQyMjE3IDQuNjE0Njk1LTEuNDgyNDQxIDQuNTkwNzg1LTEuNDIyNjY1QzQuMjc5OTUtLjQxODQzMSAzLjQ3ODk1NC0uMTQzNDYyIDIuOTc2ODM3LS4xNDM0NjJTMS4yNjcyNDgtLjQ3ODIwNyAxLjI2NzI0OC0yLjU0NjQ1MVYtMi43NzM1OTlINC41Nzg4MjlaTTEuMjc5MjAzLTMuMDAwNzQ3QzEuMzc0ODQ0LTQuODc3NzA5IDIuNDI2ODk5LTUuMDkyOTAyIDIuNzYxNjQ0LTUuMDkyOTAyQzQuMDQwODQ3LTUuMDkyOTAyIDQuMTEyNTc4LTMuNDA3MjIzIDQuMTI0NTMzLTMuMDAwNzQ3SDEuMjc5MjAzWicvPgo8cGF0aCBpZD0nZzYtMTEyJyBkPSdNMi45MjkwMTYgMS45NzI2MDNDMi4xNjM4ODUgMS45NzI2MDMgMi4wMjA0MjMgMS45NzI2MDMgMi4wMjA0MjMgMS40MzQ2MlYtLjY0NTU3OUMyLjIzNTYxNi0uMzQ2NyAyLjcyNTc3OCAuMTE5NTUyIDMuNDkwOTA5IC4xMTk1NTJDNC44NjU3NTMgLjExOTU1MiA2LjA3MzIyNS0xLjA0MDEgNi4wNzMyMjUtMi41ODIzMTZDNi4wNzMyMjUtNC4xMDA2MjMgNC45NDk0NC01LjI3MjIyOSAzLjY0NjMyNi01LjI3MjIyOUMyLjU5NDI3MS01LjI3MjIyOSAyLjAzMjM3OS00LjUxOTA1NCAxLjk5NjUxMy00LjQ3MTIzM1YtNS4yNzIyMjlMLjMzNDc0NS01LjE0MDcyMlYtNC43OTQwMjJDMS4xNzE2MDYtNC43OTQwMjIgMS4yNDMzMzctNC43MTAzMzYgMS4yNDMzMzctNC4xODQzMDlWMS40MzQ2MkMxLjI0MzMzNyAxLjk3MjYwMyAxLjExMTgzMSAxLjk3MjYwMyAuMzM0NzQ1IDEuOTcyNjAzVjIuMzE5MzAzQy42NDU1NzkgMi4yOTUzOTIgMS4yOTExNTggMi4yOTUzOTIgMS42MjU5MDMgMi4yOTUzOTJDMS45NzI2MDMgMi4yOTUzOTIgMi42MTgxODIgMi4yOTUzOTIgMi45MjkwMTYgMi4zMTkzMDNWMS45NzI2MDNaTTIuMDIwNDIzLTMuODEzNjk5QzIuMDIwNDIzLTQuMDQwODQ3IDIuMDIwNDIzLTQuMDUyODAyIDIuMTUxOTMtNC4yNDQwODVDMi41MTA1ODUtNC43ODIwNjcgMy4wOTYzODktNS4wMDkyMTUgMy41NTA2ODUtNS4wMDkyMTVDNC40NDczMjMtNS4wMDkyMTUgNS4xNjQ2MzMtMy45MjEyOTUgNS4xNjQ2MzMtMi41ODIzMTZDNS4xNjQ2MzMtMS4xNTk2NTEgNC4zNTE2ODEtLjExOTU1MiAzLjQzMTEzMy0uMTE5NTUyQzMuMDYwNTIzLS4xMTk1NTIgMi43MTM4MjMtLjI3NDk2OSAyLjQ3NDcyLS41MDIxMTdDMi4xOTk3NTEtLjc3NzA4NiAyLjAyMDQyMy0xLjAxNjE4OSAyLjAyMDQyMy0xLjM1MDkzNFYtMy44MTM2OTlaJy8+CjxwYXRoIGlkPSdnNi0xMjAnIGQ9J00zLjM0NzQ0Ny0yLjgyMTQyQzMuNjk0MTQ3LTMuMjc1NzE2IDQuMTk2MjY0LTMuOTIxMjk1IDQuNDIzNDEyLTQuMTcyMzU0QzQuOTEzNTc0LTQuNzIyMjkxIDUuNDc1NDY3LTQuODA1OTc4IDUuODU4MDMyLTQuODA1OTc4Vi01LjE1MjY3N0M1LjM0Mzk2LTUuMTI4NzY3IDUuMzIwMDUtNS4xMjg3NjcgNC44NTM3OTgtNS4xMjg3NjdDNC4zOTk1MDItNS4xMjg3NjcgNC4zNzU1OTItNS4xMjg3NjcgMy43Nzc4MzMtNS4xNTI2NzdWLTQuODA1OTc4QzMuOTMzMjUtNC43ODIwNjcgNC4xMjQ1MzMtNC43MTAzMzYgNC4xMjQ1MzMtNC40MzUzNjdDNC4xMjQ1MzMtNC4yMzIxMyA0LjAxNjkzNi00LjEwMDYyMyAzLjk0NTIwNS00LjAwNDk4MUwzLjE4MDA3NS0zLjAzNjYxM0wyLjI0NzU3Mi00LjI2Nzk5NUMyLjIxMTcwNi00LjMxNTgxNiAyLjEzOTk3NS00LjQyMzQxMiAyLjEzOTk3NS00LjUwNzA5OEMyLjEzOTk3NS00LjU3ODgyOSAyLjE5OTc1MS00Ljc5NDAyMiAyLjU1ODQwNi00LjgwNTk3OFYtNS4xNTI2NzdDMi4yNTk1MjctNS4xMjg3NjcgMS42NDk4MTMtNS4xMjg3NjcgMS4zMjcwMjQtNS4xMjg3NjdDLjkzMjUwMy01LjEyODc2NyAuOTA4NTkzLTUuMTI4NzY3IC4xNzkzMjgtNS4xNTI2NzdWLTQuODA1OTc4Qy43ODkwNDEtNC44MDU5NzggMS4wMTYxODktNC43ODIwNjcgMS4yNjcyNDgtNC40NTkyNzhMMi42NjYwMDItMi42MzAxMzdDMi42ODk5MTMtMi42MDYyMjcgMi43Mzc3MzMtMi41MzQ0OTYgMi43Mzc3MzMtMi40OTg2M1MxLjgwNTIzLTEuMjkxMTU4IDEuNjg1Njc5LTEuMTM1NzQxQzEuMTU5NjUxLS40OTAxNjIgLjYzMzYyNC0uMzU4NjU1IC4xMTk1NTItLjM0NjdWMEMuNTczODQ4LS4wMjM5MSAuNTk3NzU4LS4wMjM5MSAxLjExMTgzMS0uMDIzOTFDMS41NjYxMjctLjAyMzkxIDEuNTkwMDM3LS4wMjM5MSAyLjE4Nzc5NiAwVi0uMzQ2N0MxLjkwMDg3Mi0uMzgyNTY1IDEuODUzMDUxLS41NjE4OTMgMS44NTMwNTEtLjcyOTI2NUMxLjg1MzA1MS0uOTIwNTQ4IDEuOTM2NzM3LTEuMDE2MTg5IDIuMDU2Mjg5LTEuMTcxNjA2QzIuMjM1NjE2LTEuNDIyNjY1IDIuNjMwMTM3LTEuOTEyODI3IDIuOTE3MDYxLTIuMjgzNDM3TDMuODk3Mzg1LTEuMDA0MjM0QzQuMTAwNjIzLS43NDEyMiA0LjEwMDYyMy0uNzE3MzEgNC4xMDA2MjMtLjY0NTU3OUM0LjEwMDYyMy0uNTQ5OTM4IDQuMDA0OTgxLS4zNTg2NTUgMy42ODIxOTItLjM0NjdWMEMzLjk5MzAyNi0uMDIzOTEgNC41Nzg4MjktLjAyMzkxIDQuOTEzNTc0LS4wMjM5MUM1LjMwODA5NS0uMDIzOTEgNS4zMzIwMDUtLjAyMzkxIDYuMDQ5MzE1IDBWLS4zNDY3QzUuNDE1NjkxLS4zNDY3IDUuMjAwNDk4LS4zNzA2MSA0LjkxMzU3NC0uNzUzMTc2TDMuMzQ3NDQ3LTIuODIxNDJaJy8+CjxwYXRoIGlkPSdnMi0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2cyLTInIGQ9J000LjY1MDU2LTMuMzIzNTM3TDIuMjU5NTI3LTUuNzAyNjE1QzIuMTE2MDY1LTUuODQ2MDc3IDIuMDkyMTU0LTUuODY5OTg4IDEuOTk2NTEzLTUuODY5OTg4QzEuODc2OTYxLTUuODY5OTg4IDEuNzU3NDEtNS43NjIzOTEgMS43NTc0MS01LjYzMDg4NEMxLjc1NzQxLTUuNTQ3MTk4IDEuNzgxMzItNS41MjMyODggMS45MTI4MjctNS4zOTE3ODFMNC4zMDM4NjEtMi45ODg3OTJMMS45MTI4MjctLjU4NTgwM0MxLjc4MTMyLS40NTQyOTYgMS43NTc0MS0uNDMwMzg2IDEuNzU3NDEtLjM0NjdDMS43NTc0MS0uMjE1MTkzIDEuODc2OTYxLS4xMDc1OTcgMS45OTY1MTMtLjEwNzU5N0MyLjA5MjE1NC0uMTA3NTk3IDIuMTE2MDY1LS4xMzE1MDcgMi4yNTk1MjctLjI3NDk2OUw0LjYzODYwNS0yLjY1NDA0N0w3LjExMzMyNS0uMTc5MzI4QzcuMTM3MjM1LS4xNjczNzIgNy4yMjA5MjItLjEwNzU5NyA3LjI5MjY1My0uMTA3NTk3QzcuNDM2MTE1LS4xMDc1OTcgNy41MzE3NTYtLjIxNTE5MyA3LjUzMTc1Ni0uMzQ2N0M3LjUzMTc1Ni0uMzcwNjEgNy41MzE3NTYtLjQxODQzMSA3LjQ5NTg5LS40NzgyMDdDNy40ODM5MzUtLjUwMjExNyA1LjU4MzA2NC0yLjM3OTA3OCA0Ljk4NTMwNS0yLjk4ODc5Mkw3LjE3MzEwMS01LjE3NjU4OEM3LjIzMjg3Ny01LjI0ODMxOSA3LjQxMjIwNC01LjQwMzczNiA3LjQ3MTk4LTUuNDc1NDY3QzcuNDgzOTM1LTUuNDk5Mzc3IDcuNTMxNzU2LTUuNTQ3MTk4IDcuNTMxNzU2LTUuNjMwODg0QzcuNTMxNzU2LTUuNzYyMzkxIDcuNDM2MTE1LTUuODY5OTg4IDcuMjkyNjUzLTUuODY5OTg4QzcuMTk3MDExLTUuODY5OTg4IDcuMTQ5MTkxLTUuODIyMTY3IDcuMDE3Njg0LTUuNjkwNjZMNC42NTA1Ni0zLjMyMzUzN1onLz4KPHBhdGggaWQ9J2c0LTEyJyBkPSdNNi43NjY2MjUtNi45NTc5MDhDNi43NjY2MjUtNy42NzUyMTggNi4xNTY5MTItOC40MjgzOTQgNS4wNjg5OTEtOC40MjgzOTRDMy41MjY3NzUtOC40MjgzOTQgMi41NDY0NTEtNi41Mzk0NzcgMi4yMzU2MTYtNS4yOTYxMzlMLjM0NjcgMi4xOTk3NTFDLjMyMjc5IDIuMjk1MzkyIC4zOTQ1MjEgMi4zMTkzMDMgLjQ1NDI5NiAyLjMxOTMwM0MuNTM3OTgzIDIuMzE5MzAzIC41OTc3NTggMi4zMDczNDcgLjYwOTcxNCAyLjI0NzU3MkwxLjQ0NjU3NS0xLjA5OTg3NUMxLjU2NjEyNy0uNDMwMzg2IDIuMjIzNjYxIC4xMTk1NTIgMi45MjkwMTYgLjExOTU1MkM0LjYzODYwNSAuMTE5NTUyIDYuMjUyNTUzLTEuMjE5NDI3IDYuMjUyNTUzLTMuMDAwNzQ3QzYuMjUyNTUzLTMuNDU1MDQ0IDYuMTQ0OTU2LTMuOTA5MzQgNS44OTM4OTgtNC4yOTE5MDVDNS43NTA0MzYtNC41MTkwNTQgNS41NzExMDgtNC42ODY0MjYgNS4zNzk4MjYtNC44Mjk4ODhDNi4yNDA1OTgtNS4yODQxODQgNi43NjY2MjUtNi4wMTM0NSA2Ljc2NjYyNS02Ljk1NzkwOFpNNC42ODY0MjYtNC44NDE4NDNDNC40OTUxNDMtNC43NzAxMTIgNC4zMDM4NjEtNC43NDYyMDIgNC4wNzY3MTItNC43NDYyMDJDMy45MDkzNC00Ljc0NjIwMiAzLjc1MzkyMy00LjczNDI0NyAzLjUzODczLTQuODA1OTc4QzMuNjU4MjgxLTQuODg5NjY0IDMuODM3NjA5LTQuOTEzNTc0IDQuMDg4NjY3LTQuOTEzNTc0QzQuMzAzODYxLTQuOTEzNTc0IDQuNTE5MDU0LTQuODg5NjY0IDQuNjg2NDI2LTQuODQxODQzWk02LjE0NDk1Ni03LjA2NTUwNEM2LjE0NDk1Ni02LjQwNzk3IDUuODIyMTY3LTUuNDUxNTU3IDUuMDQ1MDgxLTUuMDA5MjE1QzQuODE3OTMzLTUuMDkyOTAyIDQuNTA3MDk4LTUuMTUyNjc3IDQuMjQ0MDg1LTUuMTUyNjc3QzMuOTkzMDI2LTUuMTUyNjc3IDMuMjc1NzE2LTUuMTc2NTg4IDMuMjc1NzE2LTQuNzk0MDIyQzMuMjc1NzE2LTQuNDcxMjMzIDMuOTMzMjUtNC41MDcwOTggNC4xMzY0ODgtNC41MDcwOThDNC40NDczMjMtNC41MDcwOTggNC43MjIyOTEtNC41Nzg4MjkgNS4wMDkyMTUtNC42NjI1MTZDNS4zOTE3ODEtNC4zNTE2ODEgNS41NTkxNTMtMy45NDUyMDUgNS41NTkxNTMtMy4zNDc0NDdDNS41NTkxNTMtMi42NTQwNDcgNS4zNjc4Ny0yLjA5MjE1NCA1LjE0MDcyMi0xLjU3ODA4MkM0Ljc0NjIwMi0uNjkzNCAzLjgxMzY5OS0uMTE5NTUyIDIuOTg4NzkyLS4xMTk1NTJDMi4xMTYwNjUtLjExOTU1MiAxLjY2MTc2OC0uODEyOTUxIDEuNjYxNzY4LTEuNjI1OTAzQzEuNjYxNzY4LTEuNzMzNDk5IDEuNjYxNzY4LTEuODg4OTE3IDEuNzA5NTg5LTIuMDY4MjQ0TDIuNDg2Njc1LTUuMjEyNDUzQzIuODgxMTk2LTYuNzc4NTggMy44ODU0My04LjE4OTI5IDUuMDQ1MDgxLTguMTg5MjlDNS45MDU4NTMtOC4xODkyOSA2LjE0NDk1Ni03LjU5MTUzMiA2LjE0NDk1Ni03LjA2NTUwNFonLz4KPHBhdGggaWQ9J2c0LTIxJyBkPSdNMy42OTQxNDctNy40NDgwN0MzLjM5NTI2OC04LjI5Njg4NyAyLjQ1MDgwOS04LjI5Njg4NyAyLjI5NTM5Mi04LjI5Njg4N0MyLjIyMzY2MS04LjI5Njg4NyAyLjA5MjE1NC04LjI5Njg4NyAyLjA5MjE1NC04LjE3NzMzNUMyLjA5MjE1NC04LjA4MTY5NCAyLjE2Mzg4NS04LjA2OTczOCAyLjIyMzY2MS04LjA1Nzc4M0MyLjQwMjk4OS04LjAzMzg3MyAyLjU0NjQ1MS04LjAwOTk2MyAyLjczNzczMy03LjY2MzI2M0MyLjg1NzI4NS03LjQzNjExNSA0LjA4ODY2Ny0zLjg2MTUxOSA0LjA4ODY2Ny0zLjgzNzYwOUM0LjA4ODY2Ny0zLjgyNTY1NCA0LjA3NjcxMi0zLjgxMzY5OSAzLjk4MTA3MS0zLjcxODA1N0wuODcyNzI3LS41NzM4NDhDLjcyOTI2NS0uNDMwMzg2IC42MzM2MjQtLjMzNDc0NSAuNjMzNjI0LS4xNzkzMjhDLjYzMzYyNC0uMDExOTU1IC43NzcwODYgLjEzMTUwNyAuOTY4MzY5IC4xMzE1MDdDMS4wMTYxODkgLjEzMTUwNyAxLjE0NzY5NiAuMTA3NTk3IDEuMjE5NDI3IC4wMzU4NjZDMS40MTA3MS0uMTQzNDYyIDMuMTIwMjk5LTIuMjM1NjE2IDQuMjA4MjE5LTMuNTI2Nzc1QzQuNTE5MDU0LTIuNTk0MjcxIDQuOTAxNjE5LTEuNDk0Mzk2IDUuMjcyMjI5LS40OTAxNjJDNS4zMzIwMDUtLjMxMDgzNCA1LjM5MTc4MS0uMTQzNDYyIDUuNTU5MTUzIC4wMTE5NTVDNS42Nzg3MDUgLjExOTU1MiA1LjcwMjYxNSAuMTE5NTUyIDYuMDM3MzYgLjExOTU1Mkg2LjI2NDUwOEM2LjMxMjMyOSAuMTE5NTUyIDYuMzk2MDE1IC4xMTk1NTIgNi4zOTYwMTUgLjAyMzkxQzYuMzk2MDE1LS4wMjM5MSA2LjM4NDA2LS4wMzU4NjYgNi4zMzYyMzktLjA4MzY4NkM2LjIyODY0My0uMjE1MTkzIDYuMTQ0OTU2LS40MzAzODYgNi4wOTcxMzYtLjU3Mzg0OEwzLjY5NDE0Ny03LjQ0ODA3WicvPgo8cGF0aCBpZD0nZzQtMjUnIGQ9J00zLjA5NjM4OS00LjUwNzA5OEg0LjQ0NzMyM0M0LjEyNDUzMy0zLjE2ODEyIDMuOTIxMjk1LTIuMjk1MzkyIDMuOTIxMjk1LTEuMzM4OTc5QzMuOTIxMjk1LTEuMTcxNjA2IDMuOTIxMjk1IC4xMTk1NTIgNC40MTE0NTcgLjExOTU1MkM0LjY2MjUxNiAuMTE5NTUyIDQuODc3NzA5LS4xMDc1OTcgNC44Nzc3MDktLjMxMDgzNEM0Ljg3NzcwOS0uMzcwNjEgNC44Nzc3MDktLjM5NDUyMSA0Ljc5NDAyMi0uNTczODQ4QzQuNDcxMjMzLTEuMzk4NzU1IDQuNDcxMjMzLTIuNDI2ODk5IDQuNDcxMjMzLTIuNTEwNTg1QzQuNDcxMjMzLTIuNTgyMzE2IDQuNDcxMjMzLTMuNDMxMTMzIDQuNzIyMjkxLTQuNTA3MDk4SDYuMDYxMjdDNi4yMTY2ODctNC41MDcwOTggNi42MTEyMDgtNC41MDcwOTggNi42MTEyMDgtNC44ODk2NjRDNi42MTEyMDgtNS4xNTI2NzcgNi4zODQwNi01LjE1MjY3NyA2LjE2ODg2Ny01LjE1MjY3N0gyLjIzNTYxNkMxLjk2MDY0OC01LjE1MjY3NyAxLjU1NDE3Mi01LjE1MjY3NyAxLjAwNDIzNC00LjU2Njg3NEMuNjkzNC00LjIyMDE3NCAuMzEwODM0LTMuNTg2NTUgLjMxMDgzNC0zLjUxNDgxOVMuMzcwNjEtMy40MTkxNzggLjQ0MjM0MS0zLjQxOTE3OEMuNTI2MDI3LTMuNDE5MTc4IC41Mzc5ODMtMy40NTUwNDQgLjU5Nzc1OC0zLjUyNjc3NUMxLjIxOTQyNy00LjUwNzA5OCAxLjg0MTA5Ni00LjUwNzA5OCAyLjEzOTk3NS00LjUwNzA5OEgyLjgyMTQyQzIuNTU4NDA2LTMuNjEwNDYxIDIuMjU5NTI3LTIuNTcwMzYxIDEuMjc5MjAzLS40NzgyMDdDMS4xODM1NjItLjI4NjkyNCAxLjE4MzU2Mi0uMjYzMDE0IDEuMTgzNTYyLS4xOTEyODNDMS4xODM1NjIgLjA1OTc3NiAxLjM5ODc1NSAuMTE5NTUyIDEuNTA2MzUxIC4xMTk1NTJDMS44NTMwNTEgLjExOTU1MiAxLjk0ODY5Mi0uMTkxMjgzIDIuMDkyMTU0LS42OTM0QzIuMjgzNDM3LTEuMzAzMTEzIDIuMjgzNDM3LTEuMzI3MDI0IDIuNDAyOTg5LTEuODA1MjNMMy4wOTYzODktNC41MDcwOThaJy8+CjxwYXRoIGlkPSdnNC0yNycgZD0nTTYuMDczMjI1LTQuNTA3MDk4QzYuMjI4NjQzLTQuNTA3MDk4IDYuNjIzMTYzLTQuNTA3MDk4IDYuNjIzMTYzLTQuODg5NjY0QzYuNjIzMTYzLTUuMTUyNjc3IDYuMzk2MDE1LTUuMTUyNjc3IDYuMTgwODIyLTUuMTUyNjc3SDMuNTM4NzNDMS43NDU0NTUtNS4xNTI2NzcgLjQ1NDI5Ni0zLjE1NjE2NCAuNDU0Mjk2LTEuNzQ1NDU1Qy40NTQyOTYtLjcyOTI2NSAxLjExMTgzMSAuMTE5NTUyIDIuMTg3Nzk2IC4xMTk1NTJDMy41OTg1MDYgLjExOTU1MiA1LjE0MDcyMi0xLjM5ODc1NSA1LjE0MDcyMi0zLjE5MjAzQzUuMTQwNzIyLTMuNjU4MjgxIDUuMDMzMTI2LTQuMTEyNTc4IDQuNzQ2MjAyLTQuNTA3MDk4SDYuMDczMjI1Wk0yLjE5OTc1MS0uMTE5NTUyQzEuNTkwMDM3LS4xMTk1NTIgMS4xNDc2OTYtLjU4NTgwMyAxLjE0NzY5Ni0xLjQxMDcxQzEuMTQ3Njk2LTIuMTI4MDIgMS41NzgwODItNC41MDcwOTggMy4zMzU0OTItNC41MDcwOThDMy44NDk1NjQtNC41MDcwOTggNC40MjM0MTItNC4yNTYwNCA0LjQyMzQxMi0zLjMzNTQ5MkM0LjQyMzQxMi0yLjkxNzA2MSA0LjIzMjEzLTEuOTEyODI3IDMuODEzNjk5LTEuMjE5NDI3QzMuMzgzMzEzLS41MTQwNzIgMi43Mzc3MzMtLjExOTU1MiAyLjE5OTc1MS0uMTE5NTUyWicvPgo8cGF0aCBpZD0nZzQtNTknIGQ9J00yLjMzMTI1OCAuMDQ3ODIxQzIuMzMxMjU4LS42NDU1NzkgMi4xMDQxMS0xLjE1OTY1MSAxLjYxMzk0OC0xLjE1OTY1MUMxLjIzMTM4Mi0xLjE1OTY1MSAxLjA0MDEtLjg0ODgxNyAxLjA0MDEtLjU4NTgwM1MxLjIxOTQyNyAwIDEuNjI1OTAzIDBDMS43ODEzMiAwIDEuOTEyODI3LS4wNDc4MjEgMi4wMjA0MjMtLjE1NTQxN0MyLjA0NDMzNC0uMTc5MzI4IDIuMDU2Mjg5LS4xNzkzMjggMi4wNjgyNDQtLjE3OTMyOEMyLjA5MjE1NC0uMTc5MzI4IDIuMDkyMTU0LS4wMTE5NTUgMi4wOTIxNTQgLjA0NzgyMUMyLjA5MjE1NCAuNDQyMzQxIDIuMDIwNDIzIDEuMjE5NDI3IDEuMzI3MDI0IDEuOTk2NTEzQzEuMTk1NTE3IDIuMTM5OTc1IDEuMTk1NTE3IDIuMTYzODg1IDEuMTk1NTE3IDIuMTg3Nzk2QzEuMTk1NTE3IDIuMjQ3NTcyIDEuMjU1MjkzIDIuMzA3MzQ3IDEuMzE1MDY4IDIuMzA3MzQ3QzEuNDEwNzEgMi4zMDczNDcgMi4zMzEyNTggMS40MjI2NjUgMi4zMzEyNTggLjA0NzgyMVonLz4KPHBhdGggaWQ9J2c0LTc2JyBkPSdNNC4zODc1NDctNy4yNDQ4MzJDNC40OTUxNDMtNy42OTkxMjggNC41MzEwMDktNy44MTg2OCA1LjU4MzA2NC03LjgxODY4QzUuOTA1ODUzLTcuODE4NjggNS45ODk1MzktNy44MTg2OCA1Ljk4OTUzOS04LjA0NTgyOEM1Ljk4OTUzOS04LjE2NTM4IDUuODU4MDMyLTguMTY1MzggNS44MTAyMTItOC4xNjUzOEM1LjU3MTEwOC04LjE2NTM4IDUuMjk2MTM5LTguMTQxNDY5IDUuMDU3MDM2LTguMTQxNDY5SDMuNDU1MDQ0QzMuMjI3ODk1LTguMTQxNDY5IDIuOTY0ODgyLTguMTY1MzggMi43Mzc3MzMtOC4xNjUzOEMyLjY0MjA5Mi04LjE2NTM4IDIuNTEwNTg1LTguMTY1MzggMi41MTA1ODUtNy45MzgyMzJDMi41MTA1ODUtNy44MTg2OCAyLjYxODE4Mi03LjgxODY4IDIuNzk3NTA5LTcuODE4NjhDMy41MjY3NzUtNy44MTg2OCAzLjUyNjc3NS03LjcyMzAzOSAzLjUyNjc3NS03LjU5MTUzMkMzLjUyNjc3NS03LjU2NzYyMSAzLjUyNjc3NS03LjQ5NTg5IDMuNDc4OTU0LTcuMzE2NTYzTDEuODY1MDA2LS44ODQ2ODJDMS43NTc0MS0uNDY2MjUyIDEuNzMzNDk5LS4zNDY3IC44OTY2MzgtLjM0NjdDLjY2OTQ4OS0uMzQ2NyAuNTQ5OTM4LS4zNDY3IC41NDk5MzgtLjEzMTUwN0MuNTQ5OTM4IDAgLjYyMTY2OSAwIC44NjA3NzIgMEg2LjIxNjY4N0M2LjQ3OTcwMSAwIDYuNDkxNjU2LS4wMTE5NTUgNi41NzUzNDItLjIyNzE0OEw3LjQ5NTg5LTIuNzczNTk5QzcuNTE5ODAxLTIuODMzMzc1IDcuNTQzNzExLTIuOTA1MTA2IDcuNTQzNzExLTIuOTQwOTcxQzcuNTQzNzExLTMuMDEyNzAyIDcuNDgzOTM1LTMuMDYwNTIzIDcuNDI0MTU5LTMuMDYwNTIzQzcuNDEyMjA0LTMuMDYwNTIzIDcuMzUyNDI4LTMuMDYwNTIzIDcuMzI4NTE4LTMuMDEyNzAyQzcuMzA0NjA4LTMuMDAwNzQ3IDcuMzA0NjA4LTIuOTc2ODM3IDcuMjA4OTY2LTIuNzQ5Njg5QzYuODI2NDAxLTEuNjk3NjM0IDYuMjg4NDE4LS4zNDY3IDQuMjY3OTk1LS4zNDY3SDMuMTIwMjk5QzIuOTUyOTI3LS4zNDY3IDIuOTI5MDE2LS4zNDY3IDIuODU3Mjg1LS4zNTg2NTVDMi43MjU3NzgtLjM3MDYxIDIuNzEzODIzLS4zOTQ1MjEgMi43MTM4MjMtLjQ5MDE2MkMyLjcxMzgyMy0uNTczODQ4IDIuNzM3NzMzLS42NDU1NzkgMi43NjE2NDQtLjc1MzE3Nkw0LjM4NzU0Ny03LjI0NDgzMlonLz4KPHBhdGggaWQ9J2c0LTEwNCcgZD0nTTMuMzU5NDAyLTcuOTk4MDA3QzMuMzcxMzU3LTguMDQ1ODI4IDMuMzk1MjY4LTguMTE3NTU5IDMuMzk1MjY4LTguMTc3MzM1QzMuMzk1MjY4LTguMjk2ODg3IDMuMjc1NzE2LTguMjk2ODg3IDMuMjUxODA2LTguMjk2ODg3QzMuMjM5ODUxLTguMjk2ODg3IDIuNjU0MDQ3LTguMjQ5MDY2IDIuNTk0MjcxLTguMjM3MTExQzIuMzkxMDM0LTguMjI1MTU2IDIuMjExNzA2LTguMjAxMjQ1IDEuOTk2NTEzLTguMTg5MjlDMS42OTc2MzQtOC4xNjUzOCAxLjYxMzk0OC04LjE1MzQyNSAxLjYxMzk0OC03LjkzODIzMkMxLjYxMzk0OC03LjgxODY4IDEuNzA5NTg5LTcuODE4NjggMS44NzY5NjEtNy44MTg2OEMyLjQ2Mjc2NS03LjgxODY4IDIuNDc0NzItNy43MTEwODMgMi40NzQ3Mi03LjU5MTUzMkMyLjQ3NDcyLTcuNTE5ODAxIDIuNDUwODA5LTcuNDI0MTU5IDIuNDM4ODU0LTcuMzg4Mjk0TC43MDUzNTUtLjQ2NjI1MkMuNjU3NTM0LS4yODY5MjQgLjY1NzUzNC0uMjYzMDE0IC42NTc1MzQtLjE5MTI4M0MuNjU3NTM0IC4wNzE3MzEgLjg2MDc3MiAuMTE5NTUyIC45ODAzMjQgLjExOTU1MkMxLjE4MzU2MiAuMTE5NTUyIDEuMzM4OTc5LS4wMzU4NjYgMS4zOTg3NTUtLjE2NzM3MkwxLjkzNjczNy0yLjMzMTI1OEMxLjk5NjUxMy0yLjU5NDI3MSAyLjA2ODI0NC0yLjg0NTMzIDIuMTI4MDItMy4xMDgzNDRDMi4yNTk1MjctMy42MTA0NjEgMi4yNTk1MjctMy42MjI0MTYgMi40ODY2NzUtMy45NjkxMTZTMy4yNTE4MDYtNS4wMzMxMjYgNC4xNzIzNTQtNS4wMzMxMjZDNC42NTA1Ni01LjAzMzEyNiA0LjgxNzkzMy00LjY3NDQ3MSA0LjgxNzkzMy00LjE5NjI2NEM0LjgxNzkzMy0zLjUyNjc3NSA0LjM1MTY4MS0yLjIyMzY2MSA0LjA4ODY2Ny0xLjUwNjM1MUMzLjk4MTA3MS0xLjIxOTQyNyAzLjkyMTI5NS0xLjA2NDAxIDMuOTIxMjk1LS44NDg4MTdDMy45MjEyOTUtLjMxMDgzNCA0LjI5MTkwNSAuMTE5NTUyIDQuODY1NzUzIC4xMTk1NTJDNS45Nzc1ODQgLjExOTU1MiA2LjM5NjAxNS0xLjYzNzg1OCA2LjM5NjAxNS0xLjcwOTU4OUM2LjM5NjAxNS0xLjc2OTM2NSA2LjM0ODE5NC0xLjgxNzE4NiA2LjI3NjQ2My0xLjgxNzE4NkM2LjE2ODg2Ny0xLjgxNzE4NiA2LjE1NjkxMi0xLjc4MTMyIDYuMDk3MTM2LTEuNTc4MDgyQzUuODIyMTY3LS42MjE2NjkgNS4zNzk4MjYtLjExOTU1MiA0LjkwMTYxOS0uMTE5NTUyQzQuNzgyMDY3LS4xMTk1NTIgNC41OTA3ODUtLjEzMTUwNyA0LjU5MDc4NS0uNTE0MDcyQzQuNTkwNzg1LS44MjQ5MDcgNC43MzQyNDctMS4yMDc0NzIgNC43ODIwNjctMS4zMzg5NzlDNC45OTcyNi0xLjkxMjgyNyA1LjUzNTI0My0zLjMyMzUzNyA1LjUzNTI0My00LjAxNjkzNkM1LjUzNTI0My00LjczNDI0NyA1LjExNjgxMi01LjI3MjIyOSA0LjIwODIxOS01LjI3MjIyOUMzLjUyNjc3NS01LjI3MjIyOSAyLjkyOTAxNi00Ljk0OTQ0IDIuNDM4ODU0LTQuMzI3NzcxTDMuMzU5NDAyLTcuOTk4MDA3WicvPgo8cGF0aCBpZD0nZzQtMTIwJyBkPSdNNS42NjY3NS00Ljg3NzcwOUM1LjI4NDE4NC00LjgwNTk3OCA1LjE0MDcyMi00LjUxOTA1NCA1LjE0MDcyMi00LjI5MTkwNUM1LjE0MDcyMi00LjAwNDk4MSA1LjM2Nzg3LTMuOTA5MzQgNS41MzUyNDMtMy45MDkzNEM1Ljg5Mzg5OC0zLjkwOTM0IDYuMTQ0OTU2LTQuMjIwMTc0IDYuMTQ0OTU2LTQuNTQyOTY0QzYuMTQ0OTU2LTUuMDQ1MDgxIDUuNTcxMTA4LTUuMjcyMjI5IDUuMDY4OTkxLTUuMjcyMjI5QzQuMzM5NzI2LTUuMjcyMjI5IDMuOTMzMjUtNC41NTQ5MTkgMy44MjU2NTQtNC4zMjc3NzFDMy41NTA2ODUtNS4yMjQ0MDggMi44MDk0NjUtNS4yNzIyMjkgMi41OTQyNzEtNS4yNzIyMjlDMS4zNzQ4NDQtNS4yNzIyMjkgLjcyOTI2NS0zLjcwNjEwMiAuNzI5MjY1LTMuNDQzMDg4Qy43MjkyNjUtMy4zOTUyNjggLjc3NzA4Ni0zLjMzNTQ5MiAuODYwNzcyLTMuMzM1NDkyQy45NTY0MTMtMy4zMzU0OTIgLjk4MDMyNC0zLjQwNzIyMyAxLjAwNDIzNC0zLjQ1NTA0NEMxLjQxMDcxLTQuNzgyMDY3IDIuMjExNzA2LTUuMDMzMTI2IDIuNTU4NDA2LTUuMDMzMTI2QzMuMDk2Mzg5LTUuMDMzMTI2IDMuMjAzOTg1LTQuNTMxMDA5IDMuMjAzOTg1LTQuMjQ0MDg1QzMuMjAzOTg1LTMuOTgxMDcxIDMuMTMyMjU0LTMuNzA2MTAyIDIuOTg4NzkyLTMuMTMyMjU0TDIuNTgyMzE2LTEuNDk0Mzk2QzIuNDAyOTg5LS43NzcwODYgMi4wNTYyODktLjExOTU1MiAxLjQyMjY2NS0uMTE5NTUyQzEuMzYyODg5LS4xMTk1NTIgMS4wNjQwMS0uMTE5NTUyIC44MTI5NTEtLjI3NDk2OUMxLjI0MzMzNy0uMzU4NjU1IDEuMzM4OTc5LS43MTczMSAxLjMzODk3OS0uODYwNzcyQzEuMzM4OTc5LTEuMDk5ODc1IDEuMTU5NjUxLTEuMjQzMzM3IC45MzI1MDMtMS4yNDMzMzdDLjY0NTU3OS0xLjI0MzMzNyAuMzM0NzQ1LS45OTIyNzkgLjMzNDc0NS0uNjA5NzE0Qy4zMzQ3NDUtLjEwNzU5NyAuODk2NjM4IC4xMTk1NTIgMS40MTA3MSAuMTE5NTUyQzEuOTg0NTU4IC4xMTk1NTIgMi4zOTEwMzQtLjMzNDc0NSAyLjY0MjA5Mi0uODI0OTA3QzIuODMzMzc1LS4xMTk1NTIgMy40MzExMzMgLjExOTU1MiAzLjg3MzQ3NCAuMTE5NTUyQzUuMDkyOTAyIC4xMTk1NTIgNS43Mzg0ODEtMS40NDY1NzUgNS43Mzg0ODEtMS43MDk1ODlDNS43Mzg0ODEtMS43NjkzNjUgNS42OTA2Ni0xLjgxNzE4NiA1LjYxODkyOS0xLjgxNzE4NkM1LjUxMTMzMy0xLjgxNzE4NiA1LjQ5OTM3Ny0xLjc1NzQxIDUuNDYzNTEyLTEuNjYxNzY4QzUuMTQwNzIyLS42MDk3MTQgNC40NDczMjMtLjExOTU1MiAzLjkwOTM0LS4xMTk1NTJDMy40OTA5MDktLjExOTU1MiAzLjI2Mzc2MS0uNDMwMzg2IDMuMjYzNzYxLS45MjA1NDhDMy4yNjM3NjEtMS4xODM1NjIgMy4zMTE1ODItMS4zNzQ4NDQgMy41MDI4NjQtMi4xNjM4ODVMMy45MjEyOTUtMy43ODk3ODhDNC4xMDA2MjMtNC41MDcwOTggNC41MDcwOTgtNS4wMzMxMjYgNS4wNTcwMzYtNS4wMzMxMjZDNS4wODA5NDYtNS4wMzMxMjYgNS40MTU2OTEtNS4wMzMxMjYgNS42NjY3NS00Ljg3NzcwOVonLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzQuOTgxMzInIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC03NicvPgo8dXNlIHg9JzEyLjk0NTgyNicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMTcuNDk4MTUyJyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtMTInLz4KPHVzZSB4PScyNC43Njk0MjMnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC01OScvPgo8dXNlIHg9JzMwLjAxMzU4MicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTI3Jy8+Cjx1c2UgeD0nMzYuNDQ1NjU0JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtNTknLz4KPHVzZSB4PSc0MS42ODk4MTMnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzQ4LjUxODMwMScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nNjMuMDMzMjYzJyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtNjEnLz4KPHVzZSB4PSc5OS4yOTg1OScgeT0nLTQxLjk1NjM1NycgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+CjxyZWN0IHg9JzgzLjI5NjA2OScgeT0nLTM3LjA5NjQ4NCcgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nMzcuODU4MDE3Jy8+Cjx1c2UgeD0nODMuMjk2MDY5JyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PSc4Ny44NDgzOTQnIHk9Jy0yNS42Njc5MzYnIHhsaW5rOmhyZWY9JyNnNi01MCcvPgo8dXNlIHg9JzkzLjcwMTM4NScgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c0LTI1Jy8+Cjx1c2UgeD0nMTAwLjc3MDY1NCcgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTA1LjMyMjk4JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNzgnLz4KPHVzZSB4PScxMTIuMTg3NTg4JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNjEnLz4KPHVzZSB4PScxMTYuNDIxNzcxJyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzUtNTAnLz4KPHVzZSB4PScxMjUuMDA2MjYzJyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzItMicvPgo8dXNlIHg9JzE1My42MDU2ODgnIHk9Jy00MS45NTYzNTcnIHhsaW5rOmhyZWY9JyNnNi00OScvPgo8cmVjdCB4PScxMzguMTU2OTM3JyB5PSctMzcuMDk2NDg0JyBoZWlnaHQ9Jy40NzgxODcnIHdpZHRoPSczNi43NTA0NzYnLz4KPHVzZSB4PScxMzguMTU2OTM3JyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxNDIuNzA5MjYzJyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzQtMjcnLz4KPHVzZSB4PScxNDkuNzkxNjY3JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzUtNTAnLz4KPHVzZSB4PScxNTQuNTIzOTgyJyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PScxNTkuMDc2MzA4JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNzgnLz4KPHVzZSB4PScxNjUuOTQwOTE2JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNjEnLz4KPHVzZSB4PScxNzAuMTc1MDk5JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzUtNTAnLz4KPHVzZSB4PScxNzguNzU5NTkxJyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzItMicvPgo8dXNlIHg9JzE5MC43MTQ3NTEnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi0xMDEnLz4KPHVzZSB4PScxOTUuOTE3NDA5JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtMTIwJy8+Cjx1c2UgeD0nMjAyLjA5NTU2NicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTExMicvPgo8dXNlIHg9JzIxMC41OTEzODYnIHk9Jy01NC4zMTIxMjInIHhsaW5rOmhyZWY9JyNnMC0zNCcvPgo8dXNlIHg9JzIxNy41NjUyNjQnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnMi0wJy8+Cjx1c2UgeD0nMjMzLjk2NjY0MicgeT0nLTQxLjk1NjM1NycgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+CjxyZWN0IHg9JzIyOC4wNTkyNzUnIHk9Jy0zNy4wOTY0ODQnIGhlaWdodD0nLjQ3ODE4Nycgd2lkdGg9JzE3LjY2NzcwOScvPgo8dXNlIHg9JzIyOC4wNTkyNzUnIHk9Jy0yNS42Njc5MzYnIHhsaW5rOmhyZWY9JyNnNi01MCcvPgo8dXNlIHg9JzIzMy45MTIyNjUnIHk9Jy0yNS42Njc5MzYnIHhsaW5rOmhyZWY9JyNnNC0yNycvPgo8dXNlIHg9JzI0MC45OTQ2NjknIHk9Jy0yOS4xMjE2NDQnIHhsaW5rOmhyZWY9JyNnNS01MCcvPgo8dXNlIHg9JzI0OC45MTQ5OTYnIHk9Jy00OC44MTI2MTknIHhsaW5rOmhyZWY9JyNnMy03OCcvPgo8dXNlIHg9JzI1Ni40ODUzMDEnIHk9Jy00OC44MTI2MTknIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nMjYzLjA3MTgwNycgeT0nLTQ4LjgxMjYxOScgeGxpbms6aHJlZj0nI2c1LTQ5Jy8+Cjx1c2UgeD0nMjQ5LjQ3NjE4NScgeT0nLTQ1LjIyNjA2MycgeGxpbms6aHJlZj0nI2cwLTg4Jy8+Cjx1c2UgeD0nMjUwLjM4OTM0JyB5PSctMTkuNzY1ODQ0JyB4bGluazpocmVmPScjZzMtMTA3Jy8+Cjx1c2UgeD0nMjU1LjAxMDk1NicgeT0nLTE5Ljc2NTg0NCcgeGxpbms6aHJlZj0nI2c1LTYxJy8+Cjx1c2UgeD0nMjYxLjU5NzQ2MycgeT0nLTE5Ljc2NTg0NCcgeGxpbms6aHJlZj0nI2c1LTQ4Jy8+Cjx1c2UgeD0nMjY5LjI5ODQ4OCcgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMjczLjg1MDgxNCcgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTEwNCcvPgo8dXNlIHg9JzI4MC41ODkzNjknIHk9Jy0zMi4wNzUzMzUnIHhsaW5rOmhyZWY9JyNnMy0yMScvPgo8dXNlIHg9JzI4Ni4wMjczODEnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzI5MC41Nzk3MDYnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0xMjAnLz4KPHVzZSB4PScyOTcuMjMxNzkzJyB5PSctMzIuMDc1MzM1JyB4bGluazpocmVmPScjZzMtMTA3Jy8+Cjx1c2UgeD0nMzAyLjM1MTU0MScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMzA5LjU2MDUzJyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzItMCcvPgo8dXNlIHg9JzMyMS41MTU2OTEnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0xMicvPgo8dXNlIHg9JzMyOC43ODY5NjInIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzMzMy4zMzkyOCcgeT0nLTM5LjY4MDEzMycgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMzM4LjA3MTU5NScgeT0nLTU0LjMxMjEyMicgeGxpbms6aHJlZj0nI2cwLTM1Jy8+Cjx1c2UgeD0nODIuMTAwNTU1JyB5PSctMTQuMTQ2OTQ2JyB4bGluazpocmVmPScjZzAtMTI0Jy8+CjxyZWN0IHg9Jzg3LjQ4MDQzNScgeT0nLTE1LjU4MTUzOCcgaGVpZ2h0PScxLjQzNDU5Micgd2lkdGg9JzEyMC43MTI2ODcnLz4KPHVzZSB4PScyMDguMTkzMTIyJyB5PSctMTQuMTQ2OTQ2JyB4bGluazpocmVmPScjZzAtMTIzJy8+Cjx1c2UgeD0nMjEzLjU3MzAwMycgeT0nLTE0LjE0Njk0NicgeGxpbms6aHJlZj0nI2cwLTEyMicvPgo8cmVjdCB4PScyMTguOTUyODgzJyB5PSctMTUuNTgxNTM4JyBoZWlnaHQ9JzEuNDM0NTkyJyB3aWR0aD0nMTIwLjcxMjY4NycvPgo8dXNlIHg9JzMzOS42NjU1NycgeT0nLTE0LjE0Njk0NicgeGxpbms6aHJlZj0nI2cwLTEyNScvPgo8dXNlIHg9JzIwMC42NjcwNjknIHk9Jy0zLjE4ODA0MicgeGxpbms6aHJlZj0nI2c1LTknLz4KPHVzZSB4PScyMDcuMjUzNTc2JyB5PSctMy4xODgwNDInIHhsaW5rOmhyZWY9JyNnNS00MCcvPgo8dXNlIHg9JzIxMC41NDY4MjknIHk9Jy0zLjE4ODA0MicgeGxpbms6aHJlZj0nI2czLTEyJy8+Cjx1c2UgeD0nMjE1LjcwODA3OCcgeT0nLTMuMTg4MDQyJyB4bGluazpocmVmPScjZzMtNTknLz4KPHVzZSB4PScyMTguMDYwNDAyJyB5PSctMy4xODgwNDInIHhsaW5rOmhyZWY9JyNnMy0yNycvPgo8dXNlIHg9JzIyMy4xODU2OTgnIHk9Jy0zLjE4ODA0MicgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMzQ3LjAzNzk0OCcgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2cyLTInLz4KPHVzZSB4PSczNTguMzI4OTQzJyB5PSctNDIuODM1MDUnIHhsaW5rOmhyZWY9JyNnMC04MScvPgo8dXNlIHg9JzM2OS42MTk5NicgeT0nLTM5LjY4MDIwOScgeGxpbms6aHJlZj0nI2czLTc4Jy8+Cjx1c2UgeD0nMzc3LjE5MDI2NScgeT0nLTM5LjY4MDIwOScgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PSczODMuNzc2NzcyJyB5PSctMzkuNjgwMjA5JyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PSczNjkuNjE5OTYnIHk9Jy0zMC4zODE1OTgnIHhsaW5rOmhyZWY9JyNnMy0xMDcnLz4KPHVzZSB4PSczNzQuMjQxNTc1JyB5PSctMzAuMzgxNTk4JyB4bGluazpocmVmPScjZzUtNjEnLz4KPHVzZSB4PSczODAuODI4MDgyJyB5PSctMzAuMzgxNTk4JyB4bGluazpocmVmPScjZzUtNDgnLz4KPHVzZSB4PSczOTAuNTAxNTg0JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtMTIwJy8+Cjx1c2UgeD0nMzk3LjE1MzY3MScgeT0nLTM4LjgxNjczMycgeGxpbms6aHJlZj0nI2czLTIxJy8+Cjx1c2UgeD0nNDAyLjA5MzU1MScgeT0nLTM4LjgxNjczMycgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PSc0MDguNjgwMDU4JyB5PSctMzguODE2NzMzJyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PSczOTcuMTUzNjcxJyB5PSctMzAuNTM4OTIxJyB4bGluazpocmVmPScjZzMtMTA3Jy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9MCAtLT4=)
We notice that for each fixed
, the likelihood equation is proportional to the likelihood equation which estimates  .
.Thus, the maximum likelihood estimators for
 for a given are :
for a given are :
Substituting these expressions in the likelihood equation and taking the
 likelihood leads to:
likelihood leads to:![\begin{array}{lcl}
\ell(\lambda) = \log L( \hat{\beta}(\lambda), \hat{\sigma}(\lambda),\lambda ) & = & C -
\frac{N}{2}
\log\left[\hat{\sigma}^2(\lambda)\right]
\;+\;
\left(\lambda - 1 \right) \sum_{k=0}^{N-1} \log(x_i)\,,%\qquad mbox{where :math:`C` is a constant.}
\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMS4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzM4Mi45NTY3NzZwdCcgaGVpZ2h0PScxNS41Nzk2MzRwdCcgdmlld0JveD0nNC45ODEzMiAtMTUuNjQxMzUzIDM4Mi45NTY3NzYgMTUuNTc5NjM0Jz4KPGRlZnM+CjxwYXRoIGlkPSdnMS0wJyBkPSdNNS41NzExMDgtMS44MDkyMTVDNS42OTg2My0xLjgwOTIxNSA1Ljg3Mzk3My0xLjgwOTIxNSA1Ljg3Mzk3My0xLjk5MjUyOFM1LjY5ODYzLTIuMTc1ODQxIDUuNTcxMTA4LTIuMTc1ODQxSDEuMDA0MjM0Qy44NzY3MTItMi4xNzU4NDEgLjcwMTM3LTIuMTc1ODQxIC43MDEzNy0xLjk5MjUyOFMuODc2NzEyLTEuODA5MjE1IDEuMDA0MjM0LTEuODA5MjE1SDUuNTcxMTA4WicvPgo8cGF0aCBpZD0nZzAtODAnIGQ9J001LjAzMzEyNiA2LjM4NDA2TC43ODkwNDEgMTEuNjMyMzc5Qy42OTM0IDExLjc1MTkzIC42ODE0NDUgMTEuNzc1ODQxIC42ODE0NDUgMTEuODIzNjYxQy42ODE0NDUgMTEuOTU1MTY4IC43ODkwNDEgMTEuOTU1MTY4IDEuMDA0MjM0IDExLjk1NTE2OEgxMC45MTUwNjhMMTEuOTQzMjEzIDguOTc4MzMxSDExLjY0NDMzNEMxMS4zNDU0NTUgOS44NzQ5NjkgMTAuNTQ0NDU4IDEwLjYwNDIzNCA5LjUyODI2OSAxMC45NTA5MzRDOS4zMzY5ODYgMTEuMDEwNzEgOC41MTIwOCAxMS4yOTc2MzQgNi43NTQ2NyAxMS4yOTc2MzRIMS42NzM3MjRMNS44MjIxNjcgNi4xNjg4NjdDNS45MDU4NTMgNi4wNjEyNyA1LjkyOTc2MyA2LjAyNTQwNSA1LjkyOTc2MyA1Ljk3NzU4NFM1LjkxNzgwOCA1LjkxNzgwOCA1Ljg0NjA3NyA1LjgxMDIxMkwxLjk2MDY0OCAuNDc4MjA3SDYuNjk0ODk0QzguMDU3NzgzIC40NzgyMDcgMTAuODA3NDcyIC41NjE4OTMgMTEuNjQ0MzM0IDIuNzk3NTA5SDExLjk0MzIxM0wxMC45MTUwNjggMEgxLjAwNDIzNEMuNjgxNDQ1IDAgLjY2OTQ4OSAuMDExOTU1IC42Njk0ODkgLjM4MjU2NUw1LjAzMzEyNiA2LjM4NDA2WicvPgo8cGF0aCBpZD0nZzUtNDgnIGQ9J00zLjg5NzM4NS0yLjU0MjQ2NkMzLjg5NzM4NS0zLjM5NTI2OCAzLjgwOTcxNC0zLjkxMzMyNSAzLjU0NjctNC40MjM0MTJDMy4xOTYwMTUtNS4xMjQ3ODIgMi41NTA0MzYtNS4zMDAxMjUgMi4xMTIwOC01LjMwMDEyNUMxLjEwNzg0Ni01LjMwMDEyNSAuNzQxMjItNC41NTA5MzQgLjYyOTYzOS00LjMyNzc3MUMuMzQyNzE1LTMuNzQ1OTUzIC4zMjY3NzUtMi45NTY5MTIgLjMyNjc3NS0yLjU0MjQ2NkMuMzI2Nzc1LTIuMDE2NDM4IC4zNTA2ODUtMS4yMTE0NTcgLjczMzI1LS41NzM4NDhDMS4wOTk4NzUgLjAxNTk0IDEuNjg5NjY0IC4xNjczNzIgMi4xMTIwOCAuMTY3MzcyQzIuNDk0NjQ1IC4xNjczNzIgMy4xODAwNzUgLjA0NzgyMSAzLjU3ODU4LS43NDEyMkMzLjg3MzQ3NC0xLjMxNTA2OCAzLjg5NzM4NS0yLjAyNDQwOCAzLjg5NzM4NS0yLjU0MjQ2NlpNMi4xMTIwOC0uMDU1NzkxQzEuODQxMDk2LS4wNTU3OTEgMS4yOTExNTgtLjE4MzMxMyAxLjEyMzc4Ni0xLjAyMDE3NEMxLjAzNjExNS0xLjQ3NDQ3MSAxLjAzNjExNS0yLjIyMzY2MSAxLjAzNjExNS0yLjYzODEwN0MxLjAzNjExNS0zLjE4ODA0NSAxLjAzNjExNS0zLjc0NTk1MyAxLjEyMzc4Ni00LjE4NDMwOUMxLjI5MTE1OC00Ljk5NzI2IDEuOTEyODI3LTUuMDc2OTYxIDIuMTEyMDgtNS4wNzY5NjFDMi4zODMwNjQtNS4wNzY5NjEgMi45MzMwMDEtNC45NDE0NjkgMy4wOTI0MDMtNC4yMTYxODlDMy4xODgwNDUtMy43Nzc4MzMgMy4xODgwNDUtMy4xODAwNzUgMy4xODgwNDUtMi42MzgxMDdDMy4xODgwNDUtMi4xNjc4NyAzLjE4ODA0NS0xLjQ1MDU2IDMuMDkyNDAzLTEuMDA0MjM0QzIuOTI1MDMxLS4xNjczNzIgMi4zNzUwOTMtLjA1NTc5MSAyLjExMjA4LS4wNTU3OTFaJy8+CjxwYXRoIGlkPSdnNS00OScgZD0nTTIuNTAyNjE1LTUuMDc2OTYxQzIuNTAyNjE1LTUuMjkyMTU0IDIuNDg2Njc1LTUuMzAwMTI1IDIuMjcxNDgyLTUuMzAwMTI1QzEuOTQ0NzA3LTQuOTgxMzIgMS41MjIyOTEtNC43OTAwMzcgLjc2NTEzMS00Ljc5MDAzN1YtNC41MjcwMjRDLjk4MDMyNC00LjUyNzAyNCAxLjQxMDcxLTQuNTI3MDI0IDEuODcyOTc2LTQuNzQyMjE3Vi0uNjUzNTQ5QzEuODcyOTc2LS4zNTg2NTUgMS44NDkwNjYtLjI2MzAxNCAxLjA5MTkwNS0uMjYzMDE0SC44MTI5NTFWMEMxLjEzOTcyNi0uMDIzOTEgMS44MjUxNTYtLjAyMzkxIDIuMTgzODExLS4wMjM5MVMzLjIzNTg2Ni0uMDIzOTEgMy41NjI2NCAwVi0uMjYzMDE0SDMuMjgzNjg2QzIuNTI2NTI2LS4yNjMwMTQgMi41MDI2MTUtLjM1ODY1NSAyLjUwMjYxNS0uNjUzNTQ5Vi01LjA3Njk2MVonLz4KPHBhdGggaWQ9J2c1LTUwJyBkPSdNMi4yNDc1NzItMS42MjU5MDNDMi4zNzUwOTMtMS43NDU0NTUgMi43MDk4MzgtMi4wMDg0NjggMi44MzczNi0yLjEyMDA1QzMuMzMxNTA3LTIuNTc0MzQ2IDMuODAxNzQzLTMuMDEyNzAyIDMuODAxNzQzLTMuNzM3OTgzQzMuODAxNzQzLTQuNjg2NDI2IDMuMDA0NzMyLTUuMzAwMTI1IDIuMDA4NDY4LTUuMzAwMTI1QzEuMDUyMDU1LTUuMzAwMTI1IC40MjI0MTYtNC41NzQ4NDQgLjQyMjQxNi0zLjg2NTUwNEMuNDIyNDE2LTMuNDc0OTY5IC43MzMyNS0zLjQxOTE3OCAuODQ0ODMyLTMuNDE5MTc4QzEuMDEyMjA0LTMuNDE5MTc4IDEuMjU5Mjc4LTMuNTM4NzMgMS4yNTkyNzgtMy44NDE1OTRDMS4yNTkyNzgtNC4yNTYwNCAuODYwNzcyLTQuMjU2MDQgLjc2NTEzMS00LjI1NjA0Qy45OTYyNjQtNC44Mzc4NTggMS41MzAyNjItNS4wMzcxMTEgMS45MjA3OTctNS4wMzcxMTFDMi42NjIwMTctNS4wMzcxMTEgMy4wNDQ1ODMtNC40MDc0NzIgMy4wNDQ1ODMtMy43Mzc5ODNDMy4wNDQ1ODMtMi45MDkwOTEgMi40NjI3NjUtMi4zMDMzNjIgMS41MjIyOTEtMS4zMzg5NzlMLjUxODA1Ny0uMzAyODY0Qy40MjI0MTYtLjIxNTE5MyAuNDIyNDE2LS4xOTkyNTMgLjQyMjQxNiAwSDMuNTcwNjFMMy44MDE3NDMtMS40MjY2NUgzLjU1NDY3QzMuNTMwNzYtMS4yNjcyNDggMy40NjY5OTktLjg2ODc0MiAzLjM3MTM1Ny0uNzE3MzFDMy4zMjM1MzctLjY1MzU0OSAyLjcxNzgwOC0uNjUzNTQ5IDIuNTkwMjg2LS42NTM1NDlIMS4xNzE2MDZMMi4yNDc1NzItMS42MjU5MDNaJy8+CjxwYXRoIGlkPSdnNS02MScgZD0nTTUuODI2MTUyLTIuNjU0MDQ3QzUuOTQ1NzA0LTIuNjU0MDQ3IDYuMTA1MTA2LTIuNjU0MDQ3IDYuMTA1MTA2LTIuODM3MzZTNS45MTM4MjMtMy4wMjA2NzIgNS43OTQyNzEtMy4wMjA2NzJILjc4MTA3MUMuNjYxNTE5LTMuMDIwNjcyIC40NzAyMzctMy4wMjA2NzIgLjQ3MDIzNy0yLjgzNzM2Uy42Mjk2MzktMi42NTQwNDcgLjc0OTE5MS0yLjY1NDA0N0g1LjgyNjE1MlpNNS43OTQyNzEtLjk2NDM4NEM1LjkxMzgyMy0uOTY0Mzg0IDYuMTA1MTA2LS45NjQzODQgNi4xMDUxMDYtMS4xNDc2OTZTNS45NDU3MDQtMS4zMzEwMDkgNS44MjYxNTItMS4zMzEwMDlILjc0OTE5MUMuNjI5NjM5LTEuMzMxMDA5IC40NzAyMzctMS4zMzEwMDkgLjQ3MDIzNy0xLjE0NzY5NlMuNjYxNTE5LS45NjQzODQgLjc4MTA3MS0uOTY0Mzg0SDUuNzk0MjcxWicvPgo8cGF0aCBpZD0nZzMtNzgnIGQ9J002LjMxMjMyOS00LjU3NDg0NEM2LjQwNzk3LTQuOTY1MzggNi41ODMzMTMtNS4xNTY2NjMgNy4xNTcxNjEtNS4xODA1NzNDNy4yMzY4NjItNS4xODA1NzMgNy4zMDA2MjMtNS4yMjgzOTQgNy4zMDA2MjMtNS4zMzIwMDVDNy4zMDA2MjMtNS4zNzk4MjYgNy4yNjA3NzItNS40NDM1ODcgNy4xODEwNzEtNS40NDM1ODdDNy4xMjUyOC01LjQ0MzU4NyA2Ljk3Mzg0OC01LjQxOTY3NiA2LjM4NDA2LTUuNDE5Njc2QzUuNzQ2NDUxLTUuNDE5Njc2IDUuNjQyODM5LTUuNDQzNTg3IDUuNTcxMTA4LTUuNDQzNTg3QzUuNDQzNTg3LTUuNDQzNTg3IDUuNDE5Njc2LTUuMzU1OTE1IDUuNDE5Njc2LTUuMjkyMTU0QzUuNDE5Njc2LTUuMTg4NTQzIDUuNTIzMjg4LTUuMTgwNTczIDUuNTk1MDE5LTUuMTgwNTczQzYuMDgxMTk2LTUuMTY0NjMzIDYuMDgxMTk2LTQuOTQ5NDQgNi4wODExOTYtNC44Mzc4NThDNi4wODExOTYtNC43OTgwMDcgNi4wODExOTYtNC43NTgxNTcgNi4wNDkzMTUtNC42MzA2MzVMNS4xNzI2MDMtMS4xMzk3MjZMMy4yNTE4MDYtNS4zMDAxMjVDMy4xODgwNDUtNS40NDM1ODcgMy4xNzIxMDUtNS40NDM1ODcgMi45ODA4MjItNS40NDM1ODdIMS45NDQ3MDdDMS44MDEyNDUtNS40NDM1ODcgMS42OTc2MzQtNS40NDM1ODcgMS42OTc2MzQtNS4yOTIxNTRDMS42OTc2MzQtNS4xODA1NzMgMS43OTMyNzUtNS4xODA1NzMgMS45NjA2NDgtNS4xODA1NzNDMi4wMjQ0MDgtNS4xODA1NzMgMi4yNjM1MTItNS4xODA1NzMgMi40NDY4MjQtNS4xMzI3NTJMMS4zNzg4MjktLjg1MjgwMkMxLjI4MzE4OC0uNDU0Mjk2IDEuMDc1OTY1LS4yNzg5NTQgLjU0MTk2OC0uMjYzMDE0Qy40OTQxNDctLjI2MzAxNCAuMzk4NTA2LS4yNTUwNDQgLjM5ODUwNi0uMTExNTgyQy4zOTg1MDYtLjA2Mzc2MSAuNDM4MzU2IDAgLjUxODA1NyAwQy41NDk5MzggMCAuNzMzMjUtLjAyMzkxIDEuMzA3MDk4LS4wMjM5MUMxLjkzNjczNy0uMDIzOTEgMi4wNTYyODkgMCAyLjEyODAyIDBDMi4xNTk5IDAgMi4yNzk0NTIgMCAyLjI3OTQ1Mi0uMTUxNDMyQzIuMjc5NDUyLS4yNDcwNzMgMi4xOTE3ODEtLjI2MzAxNCAyLjEzNTk5LS4yNjMwMTRDMS44NDkwNjYtLjI3MDk4NCAxLjYwOTk2My0uMzE4ODA0IDEuNjA5OTYzLS41OTc3NThDMS42MDk5NjMtLjYzNzYwOSAxLjYzMzg3My0uNzQ5MTkxIDEuNjMzODczLS43NTcxNjFMMi42Nzc5NTgtNC45MTc1NTlIMi42ODU5MjhMNC45MDE2MTktLjE0MzQ2MkM0Ljk1NzQxLS4wMTU5NCA0Ljk2NTM4IDAgNS4wNTMwNTEgMEM1LjE2NDYzMyAwIDUuMTcyNjAzLS4wMzE4OCA1LjIwNDQ4My0uMTY3MzcyTDYuMzEyMzI5LTQuNTc0ODQ0WicvPgo8cGF0aCBpZD0nZzMtMTA1JyBkPSdNMi4zNzUwOTMtNC45NzMzNUMyLjM3NTA5My01LjE0ODY5MiAyLjI0NzU3Mi01LjI3NjIxNCAyLjA2NDI1OS01LjI3NjIxNEMxLjg1NzAzNi01LjI3NjIxNCAxLjYyNTkwMy01LjA4NDkzMiAxLjYyNTkwMy00Ljg0NTgyOEMxLjYyNTkwMy00LjY3MDQ4NiAxLjc1MzQyNS00LjU0Mjk2NCAxLjkzNjczNy00LjU0Mjk2NEMyLjE0Mzk2LTQuNTQyOTY0IDIuMzc1MDkzLTQuNzM0MjQ3IDIuMzc1MDkzLTQuOTczMzVaTTEuMjExNDU3LTIuMDQ4MzE5TC43ODEwNzEtLjk0ODQ0M0MuNzQxMjItLjgyODg5MiAuNzAxMzctLjczMzI1IC43MDEzNy0uNTk3NzU4Qy43MDEzNy0uMjA3MjIzIDEuMDA0MjM0IC4wNzk3MDEgMS40MjY2NSAuMDc5NzAxQzIuMTk5NzUxIC4wNzk3MDEgMi41MjY1MjYtMS4wMzYxMTUgMi41MjY1MjYtMS4xMzk3MjZDMi41MjY1MjYtMS4yMTk0MjcgMi40NjI3NjUtMS4yNDMzMzcgMi40MDY5NzQtMS4yNDMzMzdDMi4zMTEzMzMtMS4yNDMzMzcgMi4yOTUzOTItMS4xODc1NDcgMi4yNzE0ODItMS4xMDc4NDZDMi4wODgxNjktLjQ3MDIzNyAxLjc2MTM5NS0uMTQzNDYyIDEuNDQyNTktLjE0MzQ2MkMxLjM0Njk0OS0uMTQzNDYyIDEuMjUxMzA4LS4xODMzMTMgMS4yNTEzMDgtLjM5ODUwNkMxLjI1MTMwOC0uNTg5Nzg4IDEuMzA3MDk4LS43MzMyNSAxLjQxMDcxLS45ODAzMjRDMS40OTA0MTEtMS4xOTU1MTcgMS41NzAxMTItMS40MTA3MSAxLjY1Nzc4My0xLjYyNTkwM0wxLjkwNDg1Ny0yLjI3MTQ4MkMxLjk3NjU4OC0yLjQ1NDc5NSAyLjA3MjIyOS0yLjcwMTg2OCAyLjA3MjIyOS0yLjgzNzM2QzIuMDcyMjI5LTMuMjM1ODY2IDEuNzUzNDI1LTMuNTE0ODE5IDEuMzQ2OTQ5LTMuNTE0ODE5Qy41NzM4NDgtMy41MTQ4MTkgLjIzOTEwMy0yLjM5OTAwNCAuMjM5MTAzLTIuMjk1MzkyQy4yMzkxMDMtMi4yMjM2NjEgLjI5NDg5NC0yLjE5MTc4MSAuMzU4NjU1LTIuMTkxNzgxQy40NjIyNjctMi4xOTE3ODEgLjQ3MDIzNy0yLjIzOTYwMSAuNDk0MTQ3LTIuMzE5MzAzQy43MTczMS0zLjA3NjQ2MyAxLjA4MzkzNS0zLjI5MTY1NiAxLjMyMzAzOS0zLjI5MTY1NkMxLjQzNDYyLTMuMjkxNjU2IDEuNTE0MzIxLTMuMjUxODA2IDEuNTE0MzIxLTMuMDI4NjQzQzEuNTE0MzIxLTIuOTQ4OTQxIDEuNTA2MzUxLTIuODM3MzYgMS40MjY2NS0yLjU5ODI1N0wxLjIxMTQ1Ny0yLjA0ODMxOVonLz4KPHBhdGggaWQ9J2czLTEwNycgZD0nTTIuMzI3MjczLTUuMjkyMTU0QzIuMzM1MjQzLTUuMzA4MDk1IDIuMzU5MTUzLTUuNDExNzA2IDIuMzU5MTUzLTUuNDE5Njc2QzIuMzU5MTUzLTUuNDU5NTI3IDIuMzI3MjczLTUuNTMxMjU4IDIuMjMxNjMxLTUuNTMxMjU4QzIuMTk5NzUxLTUuNTMxMjU4IDEuOTUyNjc3LTUuNTA3MzQ3IDEuNzY5MzY1LTUuNDkxNDA3TDEuMzIzMDM5LTUuNDU5NTI3QzEuMTQ3Njk2LTUuNDQzNTg3IDEuMDY3OTk1LTUuNDM1NjE2IDEuMDY3OTk1LTUuMjkyMTU0QzEuMDY3OTk1LTUuMTgwNTczIDEuMTc5NTc3LTUuMTgwNTczIDEuMjc1MjE4LTUuMTgwNTczQzEuNjU3NzgzLTUuMTgwNTczIDEuNjU3NzgzLTUuMTMyNzUyIDEuNjU3NzgzLTUuMDYxMDIxQzEuNjU3NzgzLTUuMDM3MTExIDEuNjU3NzgzLTUuMDIxMTcxIDEuNjE3OTMzLTQuODc3NzA5TC40ODYxNzctLjM0MjcxNUMuNDU0Mjk2LS4yMjMxNjMgLjQ1NDI5Ni0uMTc1MzQyIC40NTQyOTYtLjE2NzM3MkMuNDU0Mjk2LS4wMzE4OCAuNTY1ODc4IC4wNzk3MDEgLjcxNzMxIC4wNzk3MDFDLjk4ODI5NCAuMDc5NzAxIDEuMDUyMDU1LS4xNzUzNDIgMS4wODM5MzUtLjI4NjkyNEMxLjE2MzYzNi0uNjIxNjY5IDEuMzcwODU5LTEuNDY2NTAxIDEuNDU4NTMxLTEuODAxMjQ1QzEuODk2ODg3LTEuNzUzNDI1IDIuNDMwODg0LTEuNjAxOTkzIDIuNDMwODg0LTEuMTQ3Njk2QzIuNDMwODg0LTEuMTA3ODQ2IDIuNDMwODg0LTEuMDY3OTk1IDIuNDE0OTQ0LS45ODgyOTRDMi4zOTEwMzQtLjg4NDY4MiAyLjM3NTA5My0uNzczMTAxIDIuMzc1MDkzLS43MzMyNUMyLjM3NTA5My0uMjYzMDE0IDIuNzI1Nzc4IC4wNzk3MDEgMy4xODgwNDUgLjA3OTcwMUMzLjUyMjc5IC4wNzk3MDEgMy43MzAwMTItLjE2NzM3MiAzLjgzMzYyNC0uMzE4ODA0QzQuMDI0OTA3LS42MTM2OTkgNC4xNTI0MjgtMS4wOTE5MDUgNC4xNTI0MjgtMS4xMzk3MjZDNC4xNTI0MjgtMS4yMTk0MjcgNC4wODg2NjctMS4yNDMzMzcgNC4wMzI4NzctMS4yNDMzMzdDMy45MzcyMzUtMS4yNDMzMzcgMy45MjEyOTUtMS4xOTU1MTcgMy44ODk0MTUtMS4wNTIwNTVDMy43ODU4MDMtLjY3NzQ2IDMuNTc4NTgtLjE0MzQ2MiAzLjIwMzk4NS0uMTQzNDYyQzIuOTk2NzYyLS4xNDM0NjIgMi45NDg5NDEtLjMxODgwNCAyLjk0ODk0MS0uNTMzOTk4QzIuOTQ4OTQxLS42Mzc2MDkgMi45NTY5MTItLjczMzI1IDIuOTk2NzYyLS45MTY1NjNDMy4wMDQ3MzItLjk0ODQ0MyAzLjAzNjYxMy0xLjA3NTk2NSAzLjAzNjYxMy0xLjE2MzYzNkMzLjAzNjYxMy0xLjgxNzE4NiAyLjIxNTY5MS0xLjk2MDY0OCAxLjgwOTIxNS0yLjAxNjQzOEMyLjEwNDExLTIuMTkxNzgxIDIuMzc1MDkzLTIuNDYyNzY1IDIuNDcwNzM1LTIuNTY2Mzc2QzIuOTA5MDkxLTIuOTk2NzYyIDMuMjY3NzQ2LTMuMjkxNjU2IDMuNjUwMzExLTMuMjkxNjU2QzMuNzUzOTIzLTMuMjkxNjU2IDMuODQ5NTY0LTMuMjY3NzQ2IDMuOTEzMzI1LTMuMTg4MDQ1QzMuNDgyOTM5LTMuMTMyMjU0IDMuNDgyOTM5LTIuNzU3NjU5IDMuNDgyOTM5LTIuNzQ5Njg5QzMuNDgyOTM5LTIuNTc0MzQ2IDMuNjE4NDMxLTIuNDU0Nzk1IDMuNzkzNzczLTIuNDU0Nzk1QzQuMDA4OTY2LTIuNDU0Nzk1IDQuMjQ4MDctMi42MzAxMzcgNC4yNDgwNy0yLjk1NjkxMkM0LjI0ODA3LTMuMjI3ODk1IDQuMDU2Nzg3LTMuNTE0ODE5IDMuNjU4MjgxLTMuNTE0ODE5QzMuMTk2MDE1LTMuNTE0ODE5IDIuNzgxNTY5LTMuMTY0MTM0IDIuMzI3MjczLTIuNzA5ODM4QzEuODY1MDA2LTIuMjU1NTQyIDEuNjY1NzUzLTIuMTY3ODcgMS41MzgyMzItMi4xMTIwOEwyLjMyNzI3My01LjI5MjE1NFonLz4KPHBhdGggaWQ9J2c2LTQwJyBkPSdNMy44ODU0MyAyLjkwNTEwNkMzLjg4NTQzIDIuODY5MjQgMy44ODU0MyAyLjg0NTMzIDMuNjgyMTkyIDIuNjQyMDkyQzIuNDg2Njc1IDEuNDM0NjIgMS44MTcxODYtLjUzNzk4MyAxLjgxNzE4Ni0yLjk3NjgzN0MxLjgxNzE4Ni01LjI5NjEzOSAyLjM3OTA3OC03LjI5MjY1MyAzLjc2NTg3OC04LjcwMzM2MkMzLjg4NTQzLTguODEwOTU5IDMuODg1NDMtOC44MzQ4NjkgMy44ODU0My04Ljg3MDczNUMzLjg4NTQzLTguOTQyNDY2IDMuODI1NjU0LTguOTY2Mzc2IDMuNzc3ODMzLTguOTY2Mzc2QzMuNjIyNDE2LTguOTY2Mzc2IDIuNjQyMDkyLTguMTA1NjA0IDIuMDU2Mjg5LTYuOTMzOTk4QzEuNDQ2NTc1LTUuNzI2NTI2IDEuMTcxNjA2LTQuNDQ3MzIzIDEuMTcxNjA2LTIuOTc2ODM3QzEuMTcxNjA2LTEuOTEyODI3IDEuMzM4OTc5LS40OTAxNjIgMS45NjA2NDggLjc4OTA0MUMyLjY2NjAwMiAyLjIyMzY2MSAzLjY0NjMyNiAzLjAwMDc0NyAzLjc3NzgzMyAzLjAwMDc0N0MzLjgyNTY1NCAzLjAwMDc0NyAzLjg4NTQzIDIuOTc2ODM3IDMuODg1NDMgMi45MDUxMDZaJy8+CjxwYXRoIGlkPSdnNi00MScgZD0nTTMuMzcxMzU3LTIuOTc2ODM3QzMuMzcxMzU3LTMuODg1NDMgMy4yNTE4MDYtNS4zNjc4NyAyLjU4MjMxNi02Ljc1NDY3QzEuODc2OTYxLTguMTg5MjkgLjg5NjYzOC04Ljk2NjM3NiAuNzY1MTMxLTguOTY2Mzc2Qy43MTczMS04Ljk2NjM3NiAuNjU3NTM0LTguOTQyNDY2IC42NTc1MzQtOC44NzA3MzVDLjY1NzUzNC04LjgzNDg2OSAuNjU3NTM0LTguODEwOTU5IC44NjA3NzItOC42MDc3MjFDMi4wNTYyODktNy40MDAyNDkgMi43MjU3NzgtNS40Mjc2NDYgMi43MjU3NzgtMi45ODg3OTJDMi43MjU3NzgtLjY2OTQ4OSAyLjE2Mzg4NSAxLjMyNzAyNCAuNzc3MDg2IDIuNzM3NzMzQy42NTc1MzQgMi44NDUzMyAuNjU3NTM0IDIuODY5MjQgLjY1NzUzNCAyLjkwNTEwNkMuNjU3NTM0IDIuOTc2ODM3IC43MTczMSAzLjAwMDc0NyAuNzY1MTMxIDMuMDAwNzQ3Qy45MjA1NDggMy4wMDA3NDcgMS45MDA4NzIgMi4xMzk5NzUgMi40ODY2NzUgLjk2ODM2OUMzLjA5NjM4OS0uMjUxMDU5IDMuMzcxMzU3LTEuNTQyMjE3IDMuMzcxMzU3LTIuOTc2ODM3WicvPgo8cGF0aCBpZD0nZzYtNDMnIGQ9J000Ljc3MDExMi0yLjc2MTY0NEg4LjA2OTczOEM4LjIzNzExMS0yLjc2MTY0NCA4LjQ1MjMwNC0yLjc2MTY0NCA4LjQ1MjMwNC0yLjk3NjgzN0M4LjQ1MjMwNC0zLjIwMzk4NSA4LjI0OTA2Ni0zLjIwMzk4NSA4LjA2OTczOC0zLjIwMzk4NUg0Ljc3MDExMlYtNi41MDM2MTFDNC43NzAxMTItNi42NzA5ODQgNC43NzAxMTItNi44ODYxNzcgNC41NTQ5MTktNi44ODYxNzdDNC4zMjc3NzEtNi44ODYxNzcgNC4zMjc3NzEtNi42ODI5MzkgNC4zMjc3NzEtNi41MDM2MTFWLTMuMjAzOTg1SDEuMDI4MTQ0Qy44NjA3NzItMy4yMDM5ODUgLjY0NTU3OS0zLjIwMzk4NSAuNjQ1NTc5LTIuOTg4NzkyQy42NDU1NzktMi43NjE2NDQgLjg0ODgxNy0yLjc2MTY0NCAxLjAyODE0NC0yLjc2MTY0NEg0LjMyNzc3MVYuNTM3OTgzQzQuMzI3NzcxIC43MDUzNTUgNC4zMjc3NzEgLjkyMDU0OCA0LjU0Mjk2NCAuOTIwNTQ4QzQuNzcwMTEyIC45MjA1NDggNC43NzAxMTIgLjcxNzMxIDQuNzcwMTEyIC41Mzc5ODNWLTIuNzYxNjQ0WicvPgo8cGF0aCBpZD0nZzYtNDknIGQ9J00zLjQ0MzA4OC03LjY2MzI2M0MzLjQ0MzA4OC03LjkzODIzMiAzLjQ0MzA4OC03Ljk1MDE4NyAzLjIwMzk4NS03Ljk1MDE4N0MyLjkxNzA2MS03LjYyNzM5NyAyLjMxOTMwMy03LjE4NTA1NiAxLjA4NzkyLTcuMTg1MDU2Vi02LjgzODM1NkMxLjM2Mjg4OS02LjgzODM1NiAxLjk2MDY0OC02LjgzODM1NiAyLjYxODE4Mi03LjE0OTE5MVYtLjkyMDU0OEMyLjYxODE4Mi0uNDkwMTYyIDIuNTgyMzE2LS4zNDY3IDEuNTMwMjYyLS4zNDY3SDEuMTU5NjUxVjBDMS40ODI0NDEtLjAyMzkxIDIuNjQyMDkyLS4wMjM5MSAzLjAzNjYxMy0uMDIzOTFTNC41Nzg4MjktLjAyMzkxIDQuOTAxNjE5IDBWLS4zNDY3SDQuNTMxMDA5QzMuNDc4OTU0LS4zNDY3IDMuNDQzMDg4LS40OTAxNjIgMy40NDMwODgtLjkyMDU0OFYtNy42NjMyNjNaJy8+CjxwYXRoIGlkPSdnNi02MScgZD0nTTguMDY5NzM4LTMuODczNDc0QzguMjM3MTExLTMuODczNDc0IDguNDUyMzA0LTMuODczNDc0IDguNDUyMzA0LTQuMDg4NjY3QzguNDUyMzA0LTQuMzE1ODE2IDguMjQ5MDY2LTQuMzE1ODE2IDguMDY5NzM4LTQuMzE1ODE2SDEuMDI4MTQ0Qy44NjA3NzItNC4zMTU4MTYgLjY0NTU3OS00LjMxNTgxNiAuNjQ1NTc5LTQuMTAwNjIzQy42NDU1NzktMy44NzM0NzQgLjg0ODgxNy0zLjg3MzQ3NCAxLjAyODE0NC0zLjg3MzQ3NEg4LjA2OTczOFpNOC4wNjk3MzgtMS42NDk4MTNDOC4yMzcxMTEtMS42NDk4MTMgOC40NTIzMDQtMS42NDk4MTMgOC40NTIzMDQtMS44NjUwMDZDOC40NTIzMDQtMi4wOTIxNTQgOC4yNDkwNjYtMi4wOTIxNTQgOC4wNjk3MzgtMi4wOTIxNTRIMS4wMjgxNDRDLjg2MDc3Mi0yLjA5MjE1NCAuNjQ1NTc5LTIuMDkyMTU0IC42NDU1NzktMS44NzY5NjFDLjY0NTU3OS0xLjY0OTgxMyAuODQ4ODE3LTEuNjQ5ODEzIDEuMDI4MTQ0LTEuNjQ5ODEzSDguMDY5NzM4WicvPgo8cGF0aCBpZD0nZzYtOTEnIGQ9J00yLjk4ODc5MiAyLjk4ODc5MlYyLjU0NjQ1MUgxLjgyOTE0MVYtOC41MjQwMzVIMi45ODg3OTJWLTguOTY2Mzc2SDEuMzg2OFYyLjk4ODc5MkgyLjk4ODc5MlonLz4KPHBhdGggaWQ9J2c2LTkzJyBkPSdNMS44NTMwNTEtOC45NjYzNzZILjI1MTA1OVYtOC41MjQwMzVIMS40MTA3MVYyLjU0NjQ1MUguMjUxMDU5VjIuOTg4NzkySDEuODUzMDUxVi04Ljk2NjM3NlonLz4KPHBhdGggaWQ9J2c2LTk0JyBkPSdNMi45MjkwMTYtOC4yOTY4ODdMMS4zNjI4ODktNi42NzA5ODRMMS41NTQxNzItNi40OTE2NTZMMi45MTcwNjEtNy43MjMwMzlMNC4yOTE5MDUtNi40OTE2NTZMNC40ODMxODgtNi42NzA5ODRMMi45MjkwMTYtOC4yOTY4ODdaJy8+CjxwYXRoIGlkPSdnNi0xMDMnIGQ9J00xLjQyMjY2NS0yLjE2Mzg4NUMxLjk4NDU1OC0xLjc5MzI3NSAyLjQ2Mjc2NS0xLjc5MzI3NSAyLjU5NDI3MS0xLjc5MzI3NUMzLjY3MDIzNy0xLjc5MzI3NSA0LjQ3MTIzMy0yLjYwNjIyNyA0LjQ3MTIzMy0zLjUyNjc3NUM0LjQ3MTIzMy0zLjg0OTU2NCA0LjM3NTU5Mi00LjMwMzg2MSAzLjk5MzAyNi00LjY4NjQyNkM0LjQ1OTI3OC01LjE2NDYzMyA1LjAyMTE3MS01LjE2NDYzMyA1LjA4MDk0Ni01LjE2NDYzM0M1LjEyODc2Ny01LjE2NDYzMyA1LjE4ODU0My01LjE2NDYzMyA1LjIzNjM2NC01LjE0MDcyMkM1LjExNjgxMi01LjA5MjkwMiA1LjA1NzAzNi00Ljk3MzM1IDUuMDU3MDM2LTQuODQxODQzQzUuMDU3MDM2LTQuNjc0NDcxIDUuMTc2NTg4LTQuNTMxMDA5IDUuMzY3ODctNC41MzEwMDlDNS40NjM1MTItNC41MzEwMDkgNS42Nzg3MDUtNC41OTA3ODUgNS42Nzg3MDUtNC44NTM3OThDNS42Nzg3MDUtNS4wNjg5OTEgNS41MTEzMzMtNS40MDM3MzYgNS4wOTI5MDItNS40MDM3MzZDNC40NzEyMzMtNS40MDM3MzYgNC4wMDQ5ODEtNS4wMjExNzEgMy44Mzc2MDktNC44NDE4NDNDMy40Nzg5NTQtNS4xMTY4MTIgMy4wNjA1MjMtNS4yNzIyMjkgMi42MDYyMjctNS4yNzIyMjlDMS41MzAyNjItNS4yNzIyMjkgLjcyOTI2NS00LjQ1OTI3OCAuNzI5MjY1LTMuNTM4NzNDLjcyOTI2NS0yLjg1NzI4NSAxLjE0NzY5Ni0yLjQxNDk0NCAxLjI2NzI0OC0yLjMwNzM0N0MxLjEyMzc4Ni0yLjEyODAyIC45MDg1OTMtMS43ODEzMiAuOTA4NTkzLTEuMzE1MDY4Qy45MDg1OTMtLjYyMTY2OSAxLjMyNzAyNC0uMzIyNzkgMS40MjI2NjUtLjI2MzAxNEMuODcyNzI3LS4xMDc1OTcgLjMyMjc5IC4zMjI3OSAuMzIyNzkgLjk0NDQ1OEMuMzIyNzkgMS43NjkzNjUgMS40NDY1NzUgMi40NTA4MDkgMi45MTcwNjEgMi40NTA4MDlDNC4zMzk3MjYgMi40NTA4MDkgNS41MjMyODggMS44MTcxODYgNS41MjMyODggLjkyMDU0OEM1LjUyMzI4OCAuNjIxNjY5IDUuNDM5NjAxLS4wODM2ODYgNC43MjIyOTEtLjQ1NDI5NkM0LjExMjU3OC0uNzY1MTMxIDMuNTE0ODE5LS43NjUxMzEgMi40ODY2NzUtLjc2NTEzMUMxLjc1NzQxLS43NjUxMzEgMS42NzM3MjQtLjc2NTEzMSAxLjQ1ODUzMS0uOTkyMjc5QzEuMzM4OTc5LTEuMTExODMxIDEuMjMxMzgyLTEuMzM4OTc5IDEuMjMxMzgyLTEuNTkwMDM3QzEuMjMxMzgyLTEuNzkzMjc1IDEuMzAzMTEzLTEuOTk2NTEzIDEuNDIyNjY1LTIuMTYzODg1Wk0yLjYwNjIyNy0yLjA0NDMzNEMxLjU1NDE3Mi0yLjA0NDMzNCAxLjU1NDE3Mi0zLjI1MTgwNiAxLjU1NDE3Mi0zLjUyNjc3NUMxLjU1NDE3Mi0zLjc0MTk2OCAxLjU1NDE3Mi00LjIzMjEzIDEuNzU3NDEtNC41NTQ5MTlDMS45ODQ1NTgtNC45MDE2MTkgMi4zNDMyMTMtNS4wMjExNzEgMi41OTQyNzEtNS4wMjExNzFDMy42NDYzMjYtNS4wMjExNzEgMy42NDYzMjYtMy44MTM2OTkgMy42NDYzMjYtMy41Mzg3M0MzLjY0NjMyNi0zLjMyMzUzNyAzLjY0NjMyNi0yLjgzMzM3NSAzLjQ0MzA4OC0yLjUxMDU4NUMzLjIxNTk0LTIuMTYzODg1IDIuODU3Mjg1LTIuMDQ0MzM0IDIuNjA2MjI3LTIuMDQ0MzM0Wk0yLjkyOTAxNiAyLjE5OTc1MUMxLjc4MTMyIDIuMTk5NzUxIC45MDg1OTMgMS42MTM5NDggLjkwODU5MyAuOTMyNTAzQy45MDg1OTMgLjgzNjg2MiAuOTMyNTAzIC4zNzA2MSAxLjM4NjggLjA1OTc3NkMxLjY0OTgxMy0uMTA3NTk3IDEuNzU3NDEtLjEwNzU5NyAyLjU5NDI3MS0uMTA3NTk3QzMuNTg2NTUtLjEwNzU5NyA0LjkzNzQ4NC0uMTA3NTk3IDQuOTM3NDg0IC45MzI1MDNDNC45Mzc0ODQgMS42Mzc4NTggNC4wMjg4OTIgMi4xOTk3NTEgMi45MjkwMTYgMi4xOTk3NTFaJy8+CjxwYXRoIGlkPSdnNi0xMDgnIGQ9J00yLjA1NjI4OS04LjI5Njg4N0wuMzk0NTIxLTguMTY1MzhWLTcuODE4NjhDMS4yMDc0NzItNy44MTg2OCAxLjMwMzExMy03LjczNDk5NCAxLjMwMzExMy03LjE0OTE5MVYtLjg4NDY4MkMxLjMwMzExMy0uMzQ2NyAxLjE3MTYwNi0uMzQ2NyAuMzk0NTIxLS4zNDY3VjBDLjcyOTI2NS0uMDIzOTEgMS4zMTUwNjgtLjAyMzkxIDEuNjczNzI0LS4wMjM5MVMyLjYzMDEzNy0uMDIzOTEgMi45NjQ4ODIgMFYtLjM0NjdDMi4xOTk3NTEtLjM0NjcgMi4wNTYyODktLjM0NjcgMi4wNTYyODktLjg4NDY4MlYtOC4yOTY4ODdaJy8+CjxwYXRoIGlkPSdnNi0xMTEnIGQ9J001LjQ4NzQyMi0yLjU1ODQwNkM1LjQ4NzQyMi00LjEwMDYyMyA0LjMxNTgxNi01LjMzMjAwNSAyLjkyOTAxNi01LjMzMjAwNUMxLjQ5NDM5Ni01LjMzMjAwNSAuMzU4NjU1LTQuMDY0NzU3IC4zNTg2NTUtMi41NTg0MDZDLjM1ODY1NS0xLjAyODE0NCAxLjU1NDE3MiAuMTE5NTUyIDIuOTE3MDYxIC4xMTk1NTJDNC4zMjc3NzEgLjExOTU1MiA1LjQ4NzQyMi0xLjA1MjA1NSA1LjQ4NzQyMi0yLjU1ODQwNlpNMi45MjkwMTYtLjE0MzQ2MkMyLjQ4NjY3NS0uMTQzNDYyIDEuOTQ4NjkyLS4zMzQ3NDUgMS42MDE5OTMtLjkyMDU0OEMxLjI3OTIwMy0xLjQ1ODUzMSAxLjI2NzI0OC0yLjE2Mzg4NSAxLjI2NzI0OC0yLjY2NjAwMkMxLjI2NzI0OC0zLjEyMDI5OSAxLjI2NzI0OC0zLjg0OTU2NCAxLjYzNzg1OC00LjM4NzU0N0MxLjk3MjYwMy00LjkwMTYxOSAyLjQ5ODYzLTUuMDkyOTAyIDIuOTE3MDYxLTUuMDkyOTAyQzMuMzgzMzEzLTUuMDkyOTAyIDMuODg1NDMtNC44Nzc3MDkgNC4yMDgyMTktNC40MTE0NTdDNC41Nzg4MjktMy44NjE1MTkgNC41Nzg4MjktMy4xMDgzNDQgNC41Nzg4MjktMi42NjYwMDJDNC41Nzg4MjktMi4yNDc1NzIgNC41Nzg4MjktMS41MDYzNTEgNC4yNjc5OTUtLjk0NDQ1OEMzLjkzMzI1LS4zNzA2MSAzLjM4MzMxMy0uMTQzNDYyIDIuOTI5MDE2LS4xNDM0NjJaJy8+CjxwYXRoIGlkPSdnMi0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2c0LTEyJyBkPSdNNi43NjY2MjUtNi45NTc5MDhDNi43NjY2MjUtNy42NzUyMTggNi4xNTY5MTItOC40MjgzOTQgNS4wNjg5OTEtOC40MjgzOTRDMy41MjY3NzUtOC40MjgzOTQgMi41NDY0NTEtNi41Mzk0NzcgMi4yMzU2MTYtNS4yOTYxMzlMLjM0NjcgMi4xOTk3NTFDLjMyMjc5IDIuMjk1MzkyIC4zOTQ1MjEgMi4zMTkzMDMgLjQ1NDI5NiAyLjMxOTMwM0MuNTM3OTgzIDIuMzE5MzAzIC41OTc3NTggMi4zMDczNDcgLjYwOTcxNCAyLjI0NzU3MkwxLjQ0NjU3NS0xLjA5OTg3NUMxLjU2NjEyNy0uNDMwMzg2IDIuMjIzNjYxIC4xMTk1NTIgMi45MjkwMTYgLjExOTU1MkM0LjYzODYwNSAuMTE5NTUyIDYuMjUyNTUzLTEuMjE5NDI3IDYuMjUyNTUzLTMuMDAwNzQ3QzYuMjUyNTUzLTMuNDU1MDQ0IDYuMTQ0OTU2LTMuOTA5MzQgNS44OTM4OTgtNC4yOTE5MDVDNS43NTA0MzYtNC41MTkwNTQgNS41NzExMDgtNC42ODY0MjYgNS4zNzk4MjYtNC44Mjk4ODhDNi4yNDA1OTgtNS4yODQxODQgNi43NjY2MjUtNi4wMTM0NSA2Ljc2NjYyNS02Ljk1NzkwOFpNNC42ODY0MjYtNC44NDE4NDNDNC40OTUxNDMtNC43NzAxMTIgNC4zMDM4NjEtNC43NDYyMDIgNC4wNzY3MTItNC43NDYyMDJDMy45MDkzNC00Ljc0NjIwMiAzLjc1MzkyMy00LjczNDI0NyAzLjUzODczLTQuODA1OTc4QzMuNjU4MjgxLTQuODg5NjY0IDMuODM3NjA5LTQuOTEzNTc0IDQuMDg4NjY3LTQuOTEzNTc0QzQuMzAzODYxLTQuOTEzNTc0IDQuNTE5MDU0LTQuODg5NjY0IDQuNjg2NDI2LTQuODQxODQzWk02LjE0NDk1Ni03LjA2NTUwNEM2LjE0NDk1Ni02LjQwNzk3IDUuODIyMTY3LTUuNDUxNTU3IDUuMDQ1MDgxLTUuMDA5MjE1QzQuODE3OTMzLTUuMDkyOTAyIDQuNTA3MDk4LTUuMTUyNjc3IDQuMjQ0MDg1LTUuMTUyNjc3QzMuOTkzMDI2LTUuMTUyNjc3IDMuMjc1NzE2LTUuMTc2NTg4IDMuMjc1NzE2LTQuNzk0MDIyQzMuMjc1NzE2LTQuNDcxMjMzIDMuOTMzMjUtNC41MDcwOTggNC4xMzY0ODgtNC41MDcwOThDNC40NDczMjMtNC41MDcwOTggNC43MjIyOTEtNC41Nzg4MjkgNS4wMDkyMTUtNC42NjI1MTZDNS4zOTE3ODEtNC4zNTE2ODEgNS41NTkxNTMtMy45NDUyMDUgNS41NTkxNTMtMy4zNDc0NDdDNS41NTkxNTMtMi42NTQwNDcgNS4zNjc4Ny0yLjA5MjE1NCA1LjE0MDcyMi0xLjU3ODA4MkM0Ljc0NjIwMi0uNjkzNCAzLjgxMzY5OS0uMTE5NTUyIDIuOTg4NzkyLS4xMTk1NTJDMi4xMTYwNjUtLjExOTU1MiAxLjY2MTc2OC0uODEyOTUxIDEuNjYxNzY4LTEuNjI1OTAzQzEuNjYxNzY4LTEuNzMzNDk5IDEuNjYxNzY4LTEuODg4OTE3IDEuNzA5NTg5LTIuMDY4MjQ0TDIuNDg2Njc1LTUuMjEyNDUzQzIuODgxMTk2LTYuNzc4NTggMy44ODU0My04LjE4OTI5IDUuMDQ1MDgxLTguMTg5MjlDNS45MDU4NTMtOC4xODkyOSA2LjE0NDk1Ni03LjU5MTUzMiA2LjE0NDk1Ni03LjA2NTUwNFonLz4KPHBhdGggaWQ9J2c0LTIxJyBkPSdNMy42OTQxNDctNy40NDgwN0MzLjM5NTI2OC04LjI5Njg4NyAyLjQ1MDgwOS04LjI5Njg4NyAyLjI5NTM5Mi04LjI5Njg4N0MyLjIyMzY2MS04LjI5Njg4NyAyLjA5MjE1NC04LjI5Njg4NyAyLjA5MjE1NC04LjE3NzMzNUMyLjA5MjE1NC04LjA4MTY5NCAyLjE2Mzg4NS04LjA2OTczOCAyLjIyMzY2MS04LjA1Nzc4M0MyLjQwMjk4OS04LjAzMzg3MyAyLjU0NjQ1MS04LjAwOTk2MyAyLjczNzczMy03LjY2MzI2M0MyLjg1NzI4NS03LjQzNjExNSA0LjA4ODY2Ny0zLjg2MTUxOSA0LjA4ODY2Ny0zLjgzNzYwOUM0LjA4ODY2Ny0zLjgyNTY1NCA0LjA3NjcxMi0zLjgxMzY5OSAzLjk4MTA3MS0zLjcxODA1N0wuODcyNzI3LS41NzM4NDhDLjcyOTI2NS0uNDMwMzg2IC42MzM2MjQtLjMzNDc0NSAuNjMzNjI0LS4xNzkzMjhDLjYzMzYyNC0uMDExOTU1IC43NzcwODYgLjEzMTUwNyAuOTY4MzY5IC4xMzE1MDdDMS4wMTYxODkgLjEzMTUwNyAxLjE0NzY5NiAuMTA3NTk3IDEuMjE5NDI3IC4wMzU4NjZDMS40MTA3MS0uMTQzNDYyIDMuMTIwMjk5LTIuMjM1NjE2IDQuMjA4MjE5LTMuNTI2Nzc1QzQuNTE5MDU0LTIuNTk0MjcxIDQuOTAxNjE5LTEuNDk0Mzk2IDUuMjcyMjI5LS40OTAxNjJDNS4zMzIwMDUtLjMxMDgzNCA1LjM5MTc4MS0uMTQzNDYyIDUuNTU5MTUzIC4wMTE5NTVDNS42Nzg3MDUgLjExOTU1MiA1LjcwMjYxNSAuMTE5NTUyIDYuMDM3MzYgLjExOTU1Mkg2LjI2NDUwOEM2LjMxMjMyOSAuMTE5NTUyIDYuMzk2MDE1IC4xMTk1NTIgNi4zOTYwMTUgLjAyMzkxQzYuMzk2MDE1LS4wMjM5MSA2LjM4NDA2LS4wMzU4NjYgNi4zMzYyMzktLjA4MzY4NkM2LjIyODY0My0uMjE1MTkzIDYuMTQ0OTU2LS40MzAzODYgNi4wOTcxMzYtLjU3Mzg0OEwzLjY5NDE0Ny03LjQ0ODA3WicvPgo8cGF0aCBpZD0nZzQtMjcnIGQ9J002LjA3MzIyNS00LjUwNzA5OEM2LjIyODY0My00LjUwNzA5OCA2LjYyMzE2My00LjUwNzA5OCA2LjYyMzE2My00Ljg4OTY2NEM2LjYyMzE2My01LjE1MjY3NyA2LjM5NjAxNS01LjE1MjY3NyA2LjE4MDgyMi01LjE1MjY3N0gzLjUzODczQzEuNzQ1NDU1LTUuMTUyNjc3IC40NTQyOTYtMy4xNTYxNjQgLjQ1NDI5Ni0xLjc0NTQ1NUMuNDU0Mjk2LS43MjkyNjUgMS4xMTE4MzEgLjExOTU1MiAyLjE4Nzc5NiAuMTE5NTUyQzMuNTk4NTA2IC4xMTk1NTIgNS4xNDA3MjItMS4zOTg3NTUgNS4xNDA3MjItMy4xOTIwM0M1LjE0MDcyMi0zLjY1ODI4MSA1LjAzMzEyNi00LjExMjU3OCA0Ljc0NjIwMi00LjUwNzA5OEg2LjA3MzIyNVpNMi4xOTk3NTEtLjExOTU1MkMxLjU5MDAzNy0uMTE5NTUyIDEuMTQ3Njk2LS41ODU4MDMgMS4xNDc2OTYtMS40MTA3MUMxLjE0NzY5Ni0yLjEyODAyIDEuNTc4MDgyLTQuNTA3MDk4IDMuMzM1NDkyLTQuNTA3MDk4QzMuODQ5NTY0LTQuNTA3MDk4IDQuNDIzNDEyLTQuMjU2MDQgNC40MjM0MTItMy4zMzU0OTJDNC40MjM0MTItMi45MTcwNjEgNC4yMzIxMy0xLjkxMjgyNyAzLjgxMzY5OS0xLjIxOTQyN0MzLjM4MzMxMy0uNTE0MDcyIDIuNzM3NzMzLS4xMTk1NTIgMi4xOTk3NTEtLjExOTU1MlonLz4KPHBhdGggaWQ9J2c0LTU5JyBkPSdNMi4zMzEyNTggLjA0NzgyMUMyLjMzMTI1OC0uNjQ1NTc5IDIuMTA0MTEtMS4xNTk2NTEgMS42MTM5NDgtMS4xNTk2NTFDMS4yMzEzODItMS4xNTk2NTEgMS4wNDAxLS44NDg4MTcgMS4wNDAxLS41ODU4MDNTMS4yMTk0MjcgMCAxLjYyNTkwMyAwQzEuNzgxMzIgMCAxLjkxMjgyNy0uMDQ3ODIxIDIuMDIwNDIzLS4xNTU0MTdDMi4wNDQzMzQtLjE3OTMyOCAyLjA1NjI4OS0uMTc5MzI4IDIuMDY4MjQ0LS4xNzkzMjhDMi4wOTIxNTQtLjE3OTMyOCAyLjA5MjE1NC0uMDExOTU1IDIuMDkyMTU0IC4wNDc4MjFDMi4wOTIxNTQgLjQ0MjM0MSAyLjAyMDQyMyAxLjIxOTQyNyAxLjMyNzAyNCAxLjk5NjUxM0MxLjE5NTUxNyAyLjEzOTk3NSAxLjE5NTUxNyAyLjE2Mzg4NSAxLjE5NTUxNyAyLjE4Nzc5NkMxLjE5NTUxNyAyLjI0NzU3MiAxLjI1NTI5MyAyLjMwNzM0NyAxLjMxNTA2OCAyLjMwNzM0N0MxLjQxMDcxIDIuMzA3MzQ3IDIuMzMxMjU4IDEuNDIyNjY1IDIuMzMxMjU4IC4wNDc4MjFaJy8+CjxwYXRoIGlkPSdnNC02NycgZD0nTTguOTMwNTExLTguMzA4ODQyQzguOTMwNTExLTguNDE2NDM4IDguODQ2ODI0LTguNDE2NDM4IDguODIyOTE0LTguNDE2NDM4UzguNzUxMTgzLTguNDE2NDM4IDguNjU1NTQyLTguMjk2ODg3TDcuODMwNjM1LTcuMjkyNjUzQzcuNDEyMjA0LTguMDA5OTYzIDYuNzU0NjctOC40MTY0MzggNS44NTgwMzItOC40MTY0MzhDMy4yNzU3MTYtOC40MTY0MzggLjU5Nzc1OC01Ljc5ODI1NyAuNTk3NzU4LTIuOTg4NzkyQy41OTc3NTgtLjk5MjI3OSAxLjk5NjUxMyAuMjUxMDU5IDMuNzQxOTY4IC4yNTEwNTlDNC42OTgzODEgLjI1MTA1OSA1LjUzNTI0My0uMTU1NDE3IDYuMjI4NjQzLS43NDEyMkM3LjI2ODc0Mi0xLjYxMzk0OCA3LjU3OTU3Ny0yLjc3MzU5OSA3LjU3OTU3Ny0yLjg2OTI0QzcuNTc5NTc3LTIuOTc2ODM3IDcuNDgzOTM1LTIuOTc2ODM3IDcuNDQ4MDctMi45NzY4MzdDNy4zNDA0NzMtMi45NzY4MzcgNy4zMjg1MTgtMi45MDUxMDYgNy4zMDQ2MDgtMi44NTcyODVDNi43NTQ2Ny0uOTkyMjc5IDUuMTQwNzIyLS4wOTU2NDEgMy45NDUyMDUtLjA5NTY0MUMyLjY3Nzk1OC0uMDk1NjQxIDEuNTc4MDgyLS45MDg1OTMgMS41NzgwODItMi42MDYyMjdDMS41NzgwODItMi45ODg3OTIgMS42OTc2MzQtNS4wNjg5OTEgMy4wNDg1NjgtNi42MzUxMThDMy43MDYxMDItNy40MDAyNDkgNC44Mjk4ODgtOC4wNjk3MzggNS45NjU2MjktOC4wNjk3MzhDNy4yODA2OTctOC4wNjk3MzggNy44NjY1MDEtNi45ODE4MTggNy44NjY1MDEtNS43NjIzOTFDNy44NjY1MDEtNS40NTE1NTcgNy44MzA2MzUtNS4xODg1NDMgNy44MzA2MzUtNS4xNDA3MjJDNy44MzA2MzUtNS4wMzMxMjYgNy45NTAxODctNS4wMzMxMjYgNy45ODYwNTItNS4wMzMxMjZDOC4xMTc1NTktNS4wMzMxMjYgOC4xMjk1MTQtNS4wNDUwODEgOC4xNzczMzUtNS4yNjAyNzRMOC45MzA1MTEtOC4zMDg4NDJaJy8+CjxwYXRoIGlkPSdnNC03NicgZD0nTTQuMzg3NTQ3LTcuMjQ0ODMyQzQuNDk1MTQzLTcuNjk5MTI4IDQuNTMxMDA5LTcuODE4NjggNS41ODMwNjQtNy44MTg2OEM1LjkwNTg1My03LjgxODY4IDUuOTg5NTM5LTcuODE4NjggNS45ODk1MzktOC4wNDU4MjhDNS45ODk1MzktOC4xNjUzOCA1Ljg1ODAzMi04LjE2NTM4IDUuODEwMjEyLTguMTY1MzhDNS41NzExMDgtOC4xNjUzOCA1LjI5NjEzOS04LjE0MTQ2OSA1LjA1NzAzNi04LjE0MTQ2OUgzLjQ1NTA0NEMzLjIyNzg5NS04LjE0MTQ2OSAyLjk2NDg4Mi04LjE2NTM4IDIuNzM3NzMzLTguMTY1MzhDMi42NDIwOTItOC4xNjUzOCAyLjUxMDU4NS04LjE2NTM4IDIuNTEwNTg1LTcuOTM4MjMyQzIuNTEwNTg1LTcuODE4NjggMi42MTgxODItNy44MTg2OCAyLjc5NzUwOS03LjgxODY4QzMuNTI2Nzc1LTcuODE4NjggMy41MjY3NzUtNy43MjMwMzkgMy41MjY3NzUtNy41OTE1MzJDMy41MjY3NzUtNy41Njc2MjEgMy41MjY3NzUtNy40OTU4OSAzLjQ3ODk1NC03LjMxNjU2M0wxLjg2NTAwNi0uODg0NjgyQzEuNzU3NDEtLjQ2NjI1MiAxLjczMzQ5OS0uMzQ2NyAuODk2NjM4LS4zNDY3Qy42Njk0ODktLjM0NjcgLjU0OTkzOC0uMzQ2NyAuNTQ5OTM4LS4xMzE1MDdDLjU0OTkzOCAwIC42MjE2NjkgMCAuODYwNzcyIDBINi4yMTY2ODdDNi40Nzk3MDEgMCA2LjQ5MTY1Ni0uMDExOTU1IDYuNTc1MzQyLS4yMjcxNDhMNy40OTU4OS0yLjc3MzU5OUM3LjUxOTgwMS0yLjgzMzM3NSA3LjU0MzcxMS0yLjkwNTEwNiA3LjU0MzcxMS0yLjk0MDk3MUM3LjU0MzcxMS0zLjAxMjcwMiA3LjQ4MzkzNS0zLjA2MDUyMyA3LjQyNDE1OS0zLjA2MDUyM0M3LjQxMjIwNC0zLjA2MDUyMyA3LjM1MjQyOC0zLjA2MDUyMyA3LjMyODUxOC0zLjAxMjcwMkM3LjMwNDYwOC0zLjAwMDc0NyA3LjMwNDYwOC0yLjk3NjgzNyA3LjIwODk2Ni0yLjc0OTY4OUM2LjgyNjQwMS0xLjY5NzYzNCA2LjI4ODQxOC0uMzQ2NyA0LjI2Nzk5NS0uMzQ2N0gzLjEyMDI5OUMyLjk1MjkyNy0uMzQ2NyAyLjkyOTAxNi0uMzQ2NyAyLjg1NzI4NS0uMzU4NjU1QzIuNzI1Nzc4LS4zNzA2MSAyLjcxMzgyMy0uMzk0NTIxIDIuNzEzODIzLS40OTAxNjJDMi43MTM4MjMtLjU3Mzg0OCAyLjczNzczMy0uNjQ1NTc5IDIuNzYxNjQ0LS43NTMxNzZMNC4zODc1NDctNy4yNDQ4MzJaJy8+CjxwYXRoIGlkPSdnNC05NicgZD0nTTEuMDk5ODc1LTIuMDMyMzc5Qy4zNDY3LTEuMjkxMTU4IC4xNTU0MTctMS4xMTE4MzEgLjE1NTQxNy0xLjA2NDAxUy4yMDMyMzgtLjkzMjUwMyAuMjg2OTI0LS45MzI1MDNDLjM0NjctLjkzMjUwMyAxLjAyODE0NC0xLjU5MDAzNyAxLjEyMzc4Ni0xLjY5NzYzNEMxLjE5NTUxNy0uODk2NjM4IDEuNDk0Mzk2IC4xNDM0NjIgMi40MjY4OTkgLjE0MzQ2MkMyLjkwNTEwNiAuMTQzNDYyIDMuMzM1NDkyLS4xNTU0MTcgMy41MjY3NzUtLjI5ODg3OUMzLjY4MjE5Mi0uNDE4NDMxIDQuMjU2MDQtLjkwODU5MyA0LjI1NjA0LTEuMDE2MTg5QzQuMjU2MDQtMS4wNzU5NjUgNC4xOTYyNjQtMS4xNDc2OTYgNC4xMzY0ODgtMS4xNDc2OTZDNC4wODg2NjctMS4xNDc2OTYgMy45MDkzNC0uOTY4MzY5IDMuODYxNTE5LS45MjA1NDhDMy40NDMwODgtLjUxNDA3MiAyLjkxNzA2MS0uMDk1NjQxIDIuNDM4ODU0LS4wOTU2NDFDMS43OTMyNzUtLjA5NTY0MSAxLjcwOTU4OS0xLjAyODE0NCAxLjcwOTU4OS0xLjY3MzcyNEMxLjcwOTU4OS0xLjc5MzI3NSAxLjcwOTU4OS0yLjI5NTM5MiAxLjc5MzI3NS0yLjM5MTAzNEMyLjQ5ODYzLTMuMTIwMjk5IDQuNzEwMzM2LTUuNDAzNzM2IDQuNzEwMzM2LTcuNTE5ODAxQzQuNzEwMzM2LTcuOTk4MDA3IDQuNTMxMDA5LTguNDE2NDM4IDQuMDE2OTM2LTguNDE2NDM4QzIuOTA1MTA2LTguNDE2NDM4IDEuOTM2NzM3LTUuOTUzNjc0IDEuNzY5MzY1LTUuNDk5Mzc3QzEuNzIxNTQ0LTUuMzc5ODI2IDEuMDI4MTQ0LTMuNTM4NzMgMS4wOTk4NzUtMi4wMzIzNzlaTTEuODE3MTg2LTIuNzczNTk5QzEuODI5MTQxLTIuODQ1MzMgMi4zNjcxMjMtNS45Nzc1ODQgMy4zNzEzNTctNy42NTEzMDhDMy41NzQ1OTUtNy45NzQwOTcgMy43Nzc4MzMtOC4xNzczMzUgNC4wMTY5MzYtOC4xNzczMzVDNC40MjM0MTItOC4xNzczMzUgNC40NDczMjMtNy43OTQ3NyA0LjQ0NzMyMy03LjUzMTc1NkM0LjQ0NzMyMy03LjExMzMyNSA0LjMyNzc3MS02LjAzNzM2IDMuMjg3NjcxLTQuNTMxMDA5QzIuOTc2ODM3LTQuMDg4NjY3IDIuNDk4NjMtMy40OTA5MDkgMS44MTcxODYtMi43NzM1OTlaJy8+CjxwYXRoIGlkPSdnNC0xMjAnIGQ9J001LjY2Njc1LTQuODc3NzA5QzUuMjg0MTg0LTQuODA1OTc4IDUuMTQwNzIyLTQuNTE5MDU0IDUuMTQwNzIyLTQuMjkxOTA1QzUuMTQwNzIyLTQuMDA0OTgxIDUuMzY3ODctMy45MDkzNCA1LjUzNTI0My0zLjkwOTM0QzUuODkzODk4LTMuOTA5MzQgNi4xNDQ5NTYtNC4yMjAxNzQgNi4xNDQ5NTYtNC41NDI5NjRDNi4xNDQ5NTYtNS4wNDUwODEgNS41NzExMDgtNS4yNzIyMjkgNS4wNjg5OTEtNS4yNzIyMjlDNC4zMzk3MjYtNS4yNzIyMjkgMy45MzMyNS00LjU1NDkxOSAzLjgyNTY1NC00LjMyNzc3MUMzLjU1MDY4NS01LjIyNDQwOCAyLjgwOTQ2NS01LjI3MjIyOSAyLjU5NDI3MS01LjI3MjIyOUMxLjM3NDg0NC01LjI3MjIyOSAuNzI5MjY1LTMuNzA2MTAyIC43MjkyNjUtMy40NDMwODhDLjcyOTI2NS0zLjM5NTI2OCAuNzc3MDg2LTMuMzM1NDkyIC44NjA3NzItMy4zMzU0OTJDLjk1NjQxMy0zLjMzNTQ5MiAuOTgwMzI0LTMuNDA3MjIzIDEuMDA0MjM0LTMuNDU1MDQ0QzEuNDEwNzEtNC43ODIwNjcgMi4yMTE3MDYtNS4wMzMxMjYgMi41NTg0MDYtNS4wMzMxMjZDMy4wOTYzODktNS4wMzMxMjYgMy4yMDM5ODUtNC41MzEwMDkgMy4yMDM5ODUtNC4yNDQwODVDMy4yMDM5ODUtMy45ODEwNzEgMy4xMzIyNTQtMy43MDYxMDIgMi45ODg3OTItMy4xMzIyNTRMMi41ODIzMTYtMS40OTQzOTZDMi40MDI5ODktLjc3NzA4NiAyLjA1NjI4OS0uMTE5NTUyIDEuNDIyNjY1LS4xMTk1NTJDMS4zNjI4ODktLjExOTU1MiAxLjA2NDAxLS4xMTk1NTIgLjgxMjk1MS0uMjc0OTY5QzEuMjQzMzM3LS4zNTg2NTUgMS4zMzg5NzktLjcxNzMxIDEuMzM4OTc5LS44NjA3NzJDMS4zMzg5NzktMS4wOTk4NzUgMS4xNTk2NTEtMS4yNDMzMzcgLjkzMjUwMy0xLjI0MzMzN0MuNjQ1NTc5LTEuMjQzMzM3IC4zMzQ3NDUtLjk5MjI3OSAuMzM0NzQ1LS42MDk3MTRDLjMzNDc0NS0uMTA3NTk3IC44OTY2MzggLjExOTU1MiAxLjQxMDcxIC4xMTk1NTJDMS45ODQ1NTggLjExOTU1MiAyLjM5MTAzNC0uMzM0NzQ1IDIuNjQyMDkyLS44MjQ5MDdDMi44MzMzNzUtLjExOTU1MiAzLjQzMTEzMyAuMTE5NTUyIDMuODczNDc0IC4xMTk1NTJDNS4wOTI5MDIgLjExOTU1MiA1LjczODQ4MS0xLjQ0NjU3NSA1LjczODQ4MS0xLjcwOTU4OUM1LjczODQ4MS0xLjc2OTM2NSA1LjY5MDY2LTEuODE3MTg2IDUuNjE4OTI5LTEuODE3MTg2QzUuNTExMzMzLTEuODE3MTg2IDUuNDk5Mzc3LTEuNzU3NDEgNS40NjM1MTItMS42NjE3NjhDNS4xNDA3MjItLjYwOTcxNCA0LjQ0NzMyMy0uMTE5NTUyIDMuOTA5MzQtLjExOTU1MkMzLjQ5MDkwOS0uMTE5NTUyIDMuMjYzNzYxLS40MzAzODYgMy4yNjM3NjEtLjkyMDU0OEMzLjI2Mzc2MS0xLjE4MzU2MiAzLjMxMTU4Mi0xLjM3NDg0NCAzLjUwMjg2NC0yLjE2Mzg4NUwzLjkyMTI5NS0zLjc4OTc4OEM0LjEwMDYyMy00LjUwNzA5OCA0LjUwNzA5OC01LjAzMzEyNiA1LjA1NzAzNi01LjAzMzEyNkM1LjA4MDk0Ni01LjAzMzEyNiA1LjQxNTY5MS01LjAzMzEyNiA1LjY2Njc1LTQuODc3NzA5WicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nNC45ODEzMicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtOTYnLz4KPHVzZSB4PSc5Ljg5MzQyNicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxNC40NDU3NTInIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTIxJy8+Cjx1c2UgeD0nMjEuMjc0MjQxJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzI5LjE0NzM5NicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNjEnLz4KPHVzZSB4PSc0MS41NzI4NzcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwOCcvPgo8dXNlIHg9JzQ0LjgyNDUzOCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTExJy8+Cjx1c2UgeD0nNTAuNjc3NTI4JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMDMnLz4KPHVzZSB4PSc1OC42ODU1OTknIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTc2Jy8+Cjx1c2UgeD0nNjYuNjUwMTA2JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzcyLjg4NzA3OCcgeT0nLTcuMzM5MTYyJyB4bGluazpocmVmPScjZzYtOTQnLz4KPHVzZSB4PSc3MS4yMDI0MzEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTEyJy8+Cjx1c2UgeD0nNzguNDczNzAyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzgzLjAyNjAyOCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMjEnLz4KPHVzZSB4PSc4OS44NTQ1MTcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nOTQuNDA2ODQyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC01OScvPgo8dXNlIHg9JzEwMC4yNjU3MTYnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTk0Jy8+Cjx1c2UgeD0nOTkuNjUxMDAxJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yNycvPgo8dXNlIHg9JzEwNi43MzM0MDUnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMTExLjI4NTczMScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMjEnLz4KPHVzZSB4PScxMTguMTE0MjInIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTIyLjY2NjU0NScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtNTknLz4KPHVzZSB4PScxMjcuOTEwNzA0JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzEzNC43MzkxOTMnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTQ5LjI1NDE1NScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNjEnLz4KPHVzZSB4PScxNjguMzIxNDQ3JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC02NycvPgo8dXNlIHg9JzE4MC4yMTE3MjInIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2cyLTAnLz4KPHVzZSB4PScxOTMuMzYyMzk2JyB5PSctOC44OTE0NzcnIHhsaW5rOmhyZWY9JyNnMy03OCcvPgo8cmVjdCB4PScxOTMuMzYyMzk2JyB5PSctNy40MTIyMzcnIGhlaWdodD0nLjQ3ODE4Nycgd2lkdGg9JzcuNTcwMzA1Jy8+Cjx1c2UgeD0nMTk1LjAzMDQ1OCcgeT0nLS4wNjE3MTknIHhsaW5rOmhyZWY9JyNnNS01MCcvPgo8dXNlIHg9JzIwNC4xMjA3MTMnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwOCcvPgo8dXNlIHg9JzIwNy4zNzIzNzQnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTExMScvPgo8dXNlIHg9JzIxMy4yMjUzNjQnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwMycvPgo8dXNlIHg9JzIyMS4yMzM0MzUnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTkxJy8+Cjx1c2UgeD0nMjI1LjA5OTgxMScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtOTQnLz4KPHVzZSB4PScyMjQuNDg1MDk3JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yNycvPgo8dXNlIHg9JzIzMS41Njc1MDEnIHk9Jy04LjUyMjc4OCcgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMjM2LjI5OTgxNScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScyNDAuODUyMTQxJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzI0Ny42ODA2MycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PScyNTIuMjMyOTU2JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi05MycvPgo8dXNlIHg9JzI2MS40NjIxMScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDMnLz4KPHVzZSB4PScyNzYuNTQ0MjU0JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzI4MS4wOTY1OCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMjEnLz4KPHVzZSB4PScyOTAuNTgxNzMyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnMi0wJy8+Cjx1c2UgeD0nMzAyLjUzNjg5MicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDknLz4KPHVzZSB4PSczMDguMzg5ODgzJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzMxNC45MzQ2OTgnIHk9Jy0xMy4xNTA4MDQnIHhsaW5rOmhyZWY9JyNnMC04MCcvPgo8dXNlIHg9JzMyNy41NTQwNzgnIHk9Jy05Ljk5NTk2MicgeGxpbms6aHJlZj0nI2czLTc4Jy8+Cjx1c2UgeD0nMzM1LjEyNDM4MycgeT0nLTkuOTk1OTYyJyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzM0MS43MTA4OScgeT0nLTkuOTk1OTYyJyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PSczMjcuNTU0MDc4JyB5PSctLjY5NzM1MScgeGxpbms6aHJlZj0nI2czLTEwNycvPgo8dXNlIHg9JzMzMi4xNzU2OTQnIHk9Jy0uNjk3MzUxJyB4bGluazpocmVmPScjZzUtNjEnLz4KPHVzZSB4PSczMzguNzYyMicgeT0nLS42OTczNTEnIHhsaW5rOmhyZWY9JyNnNS00OCcvPgo8dXNlIHg9JzM0OC40MzU3MDInIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwOCcvPgo8dXNlIHg9JzM1MS42ODczNjQnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTExMScvPgo8dXNlIHg9JzM1Ny41NDAzNTQnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwMycvPgo8dXNlIHg9JzM2My41NTU5MjcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMzY4LjEwODI1MycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMTIwJy8+Cjx1c2UgeD0nMzc0Ljc2MDM0JyB5PSctMi4zOTEwODgnIHhsaW5rOmhyZWY9JyNnMy0xMDUnLz4KPHVzZSB4PSczNzguMTQxNjEyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzM4NC42ODY0MzUnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTU5Jy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9MCAtLT4=)
The parameter
 is the one maximising
is the one maximising  .
.In the case of surrogate model estimate, we note
the input sample of ,  the input sample of
the input sample of  .
We suppose the general linear model link
.
We suppose the general linear model link  with
with  :
:
 is a functional basis with
is a functional basis with  for all i,
for all i,  are the coefficients of the linear combination and
are the coefficients of the linear combination and  is a zero-mean gaussian process with a stationary covariance function
is a zero-mean gaussian process with a stationary covariance function  Thus implies that
Thus implies that  .
.The likelihood function to be maximized writes as follows:

where
 is the matrix resulted from the discretization of the covariance model over .
The parameter is the one maximising
is the matrix resulted from the discretization of the covariance model over .
The parameter is the one maximising  .
.Examples
Estimate the Box Cox transformation from a sample:
>>> import openturns as ot >>> sample = ot.Exponential(2).getSample(10) >>> factory = ot.BoxCoxFactory() >>> transform = factory.build(sample) >>> estimatedLambda = transform.getLambda()
Estimate the Box Cox transformation from a field:
>>> indices = [10, 5] >>> mesher = ot.IntervalMesher(indices) >>> interval = ot.Interval([0.0, 0.0], [2.0, 1.0]) >>> mesh = mesher.build(interval) >>> amplitude = [1.0] >>> scale = [0.2, 0.2] >>> covModel = ot.ExponentialModel(scale, amplitude) >>> Xproc = ot.GaussianProcess(covModel, mesh) >>> g = ot.SymbolicFunction(['x1'], ['exp(x1)']) >>> dynTransform = ot.ValueFunction(g, mesh) >>> XtProcess = ot.CompositeProcess(dynTransform, Xproc)
>>> field = XtProcess.getRealization() >>> transform = ot.BoxCoxFactory().build(field)
- buildWithGLM(*args)¶
Estimate the Box Cox transformation with general linear model.
Refer to
build()for details.- Parameters:
- inputSample, outputSample
Sampleor 2d-array The input and output samples of a model evaluated apart.
- covarianceModel
CovarianceModel Covariance model. Should have input dimension equal to input sample’s dimension and dimension equal to output sample’s dimension. See note for some particular applications.
- basis
Basis, optional Functional basis to estimate the trend:
 .
If
.
If  , the same basis is used for each marginal output.
, the same basis is used for each marginal output.- shift
Point It ensures that when shifted, the data are all positive. By default the opposite of the min vector of the data is used if some data are negative.
- inputSample, outputSample
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- generalLinearModelResult
GeneralLinearModelResult The structure that contains results of general linear model algorithm.
- transform
Examples
Estimation of a general linear model:
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> inputSample = ot.Uniform(-1.0, 1.0).getSample(20) >>> outputSample = ot.Sample(inputSample) >>> # Evaluation of y = ax + b (a: scale, b: translate) >>> outputSample = outputSample * [3] + [3.1] >>> # inverse transfo + small noise >>> def f(x): import math; return [math.exp(x[0])] >>> inv_transfo = ot.PythonFunction(1, 1, f) >>> outputSample = inv_transfo(outputSample) + ot.Normal(0, 1.0e-2).getSample(20) >>> # Estimation >>> basis = ot.LinearBasisFactory(1).build() >>> covarianceModel = ot.DiracCovarianceModel() >>> shift = [1.0e-1] >>> boxCox, result = ot.BoxCoxFactory().buildWithGLM(inputSample, outputSample, covarianceModel, basis, shift)
- buildWithGraph(*args)¶
Estimate the Box Cox transformation with graph output.
- Parameters:
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- graph
Graph The graph plots the evolution of the likelihood with respect to the value of
for each component i.
It enables to graphically detect the optimal values.
- transform
- buildWithLM(*args)¶
Estimate the Box Cox transformation with linear model.
Refer to
build()for details.- Parameters:
- inputSample, outputSample
Sampleor 2d-array The input and output samples of a model evaluated apart.
- covarianceModel
CovarianceModel Covariance model. Should have input dimension equal to input sample’s dimension and dimension equal to output sample’s dimension. See note for some particular applications.
- basis
Basis, optional Functional basis to estimate the trend:
.
If , the same basis is used for each marginal output.- shift
Point It ensures that when shifted, the data are all positive. By default the opposite of the min vector of the data is used if some data are negative.
- inputSample, outputSample
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- linearModelResult
LinearModelResult The structure that contains results of linear model algorithm.
- transform
Examples
Estimation of a linear model:
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> x = ot.Uniform(-1.0, 1.0).getSample(20) >>> y = ot.Sample(x) >>> # Evaluation of y = ax + b (a: scale, b: translate) >>> y = y * [3] + [3.1] >>> # inverse transformation >>> inv_transformation = ot.SymbolicFunction('x', 'exp(x)') >>> y = inv_transformation(y) + ot.Normal(0, 1.0e-4).getSample(20) >>> # Estimation >>> shift = [1.0e-1] >>> boxCox, result = ot.BoxCoxFactory().buildWithLM(x, y, shift)
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getId()¶
Accessor to the object’s id.
- Returns:
- idint
Internal unique identifier.
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- getOptimizationAlgorithm()¶
Accessor to the solver.
- Returns:
- solver
OptimizationAlgorithm The solver used for numerical optimization.
- solver
- getShadowedId()¶
Accessor to the object’s shadowed id.
- Returns:
- idint
Internal unique identifier.
- getVisibility()¶
Accessor to the object’s visibility state.
- Returns:
- visiblebool
Visibility flag.
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- hasVisibleName()¶
Test if the object has a distinguishable name.
- Returns:
- hasVisibleNamebool
True if the name is not empty and not the default one.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
- setOptimizationAlgorithm(solver)¶
Accessor to the solver.
- Parameters:
- solver
OptimizationAlgorithm The solver used for numerical optimization.
- solver
- setShadowedId(id)¶
Accessor to the object’s shadowed id.
- Parameters:
- idint
Internal unique identifier.
- setVisibility(visible)¶
Accessor to the object’s visibility state.
- Parameters:
- visiblebool
Visibility flag.