Note
Go to the end to download the full example code
Create a threshold event¶
Abstract¶
We present in this example the creation and the use of a ThresholdEvent to estimate a simple integral.
import openturns as ot
import openturns.viewer as otv
from matplotlib import pylab as plt
We consider a standard Gaussian random vector  and build a random vector from this distribution.
and build a random vector from this distribution.
distX = ot.Normal()
vecX = ot.RandomVector(distX)
We consider the simple model  and consider the output random variable
and consider the output random variable  .
.
f = ot.SymbolicFunction(["x1"], ["abs(x1)"])
vecY = ot.CompositeRandomVector(f, vecX)
We define a very simple ThresholdEvent which happpens whenever  :
:
thresholdEvent = ot.ThresholdEvent(vecY, ot.Less(), 1.0)
For the normal distribution, it is a well-known fact that the values lower than one standard deviation (here exactly 1) away from the mean (here 0) account roughly for 68.27% of the set. So the probability of the event is:
print("Probability of the event : %.4f" % 0.6827)
Probability of the event : 0.6827
We can also use a basic estimator to get the probability of the event by drawing samples from the initial distribution distX and counting those which realize the event:
print(
"Probability of the event (event sampling) : %.4f"
% thresholdEvent.getSample(1000).computeMean()[0]
)
Probability of the event (event sampling) : 0.6830
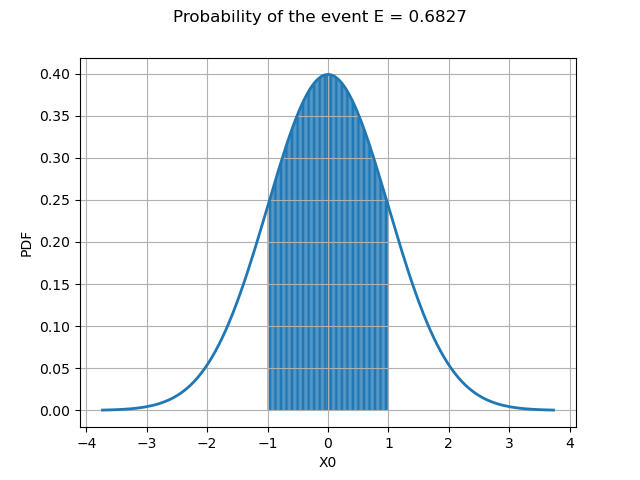
The geometric interpretation is simply the area under the PDF of the standard normal distribution for ![x \in [-1,1]](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMiAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPSc1NC4wMTU4NDNwdCcgaGVpZ2h0PScxMS45NTUxNjhwdCcgdmlld0JveD0nMCAtOC45NjYzNzYgNTQuMDE1ODQzIDExLjk1NTE2OCc+CjxkZWZzPgo8cGF0aCBpZD0nZzItNDknIGQ9J00zLjQ0MzA4OC03LjY2MzI2M0MzLjQ0MzA4OC03LjkzODIzMiAzLjQ0MzA4OC03Ljk1MDE4NyAzLjIwMzk4NS03Ljk1MDE4N0MyLjkxNzA2MS03LjYyNzM5NyAyLjMxOTMwMy03LjE4NTA1NiAxLjA4NzkyLTcuMTg1MDU2Vi02LjgzODM1NkMxLjM2Mjg4OS02LjgzODM1NiAxLjk2MDY0OC02LjgzODM1NiAyLjYxODE4Mi03LjE0OTE5MVYtLjkyMDU0OEMyLjYxODE4Mi0uNDkwMTYyIDIuNTgyMzE2LS4zNDY3IDEuNTMwMjYyLS4zNDY3SDEuMTU5NjUxVjBDMS40ODI0NDEtLjAyMzkxIDIuNjQyMDkyLS4wMjM5MSAzLjAzNjYxMy0uMDIzOTFTNC41Nzg4MjktLjAyMzkxIDQuOTAxNjE5IDBWLS4zNDY3SDQuNTMxMDA5QzMuNDc4OTU0LS4zNDY3IDMuNDQzMDg4LS40OTAxNjIgMy40NDMwODgtLjkyMDU0OFYtNy42NjMyNjNaJy8+CjxwYXRoIGlkPSdnMi05MScgZD0nTTIuOTg4NzkyIDIuOTg4NzkyVjIuNTQ2NDUxSDEuODI5MTQxVi04LjUyNDAzNUgyLjk4ODc5MlYtOC45NjYzNzZIMS4zODY4VjIuOTg4NzkySDIuOTg4NzkyWicvPgo8cGF0aCBpZD0nZzItOTMnIGQ9J00xLjg1MzA1MS04Ljk2NjM3NkguMjUxMDU5Vi04LjUyNDAzNUgxLjQxMDcxVjIuNTQ2NDUxSC4yNTEwNTlWMi45ODg3OTJIMS44NTMwNTFWLTguOTY2Mzc2WicvPgo8cGF0aCBpZD0nZzAtMCcgZD0nTTcuODc4NDU2LTIuNzQ5Njg5QzguMDgxNjk0LTIuNzQ5Njg5IDguMjk2ODg3LTIuNzQ5Njg5IDguMjk2ODg3LTIuOTg4NzkyUzguMDgxNjk0LTMuMjI3ODk1IDcuODc4NDU2LTMuMjI3ODk1SDEuNDEwNzFDMS4yMDc0NzItMy4yMjc4OTUgLjk5MjI3OS0zLjIyNzg5NSAuOTkyMjc5LTIuOTg4NzkyUzEuMjA3NDcyLTIuNzQ5Njg5IDEuNDEwNzEtMi43NDk2ODlINy44Nzg0NTZaJy8+CjxwYXRoIGlkPSdnMC01MCcgZD0nTTYuNTUxNDMyLTIuNzQ5Njg5QzYuNzU0NjctMi43NDk2ODkgNi45Njk4NjMtMi43NDk2ODkgNi45Njk4NjMtMi45ODg3OTJTNi43NTQ2Ny0zLjIyNzg5NSA2LjU1MTQzMi0zLjIyNzg5NUgxLjQ4MjQ0MUMxLjYyNTkwMy00LjgyOTg4OCAzLjAwMDc0Ny01Ljk3NzU4NCA0LjY4NjQyNi01Ljk3NzU4NEg2LjU1MTQzMkM2Ljc1NDY3LTUuOTc3NTg0IDYuOTY5ODYzLTUuOTc3NTg0IDYuOTY5ODYzLTYuMjE2Njg3UzYuNzU0NjctNi40NTU3OTEgNi41NTE0MzItNi40NTU3OTFINC42NjI1MTZDMi42MTgxODItNi40NTU3OTEgLjk5MjI3OS00LjkwMTYxOSAuOTkyMjc5LTIuOTg4NzkyUzIuNjE4MTgyIC40NzgyMDcgNC42NjI1MTYgLjQ3ODIwN0g2LjU1MTQzMkM2Ljc1NDY3IC40NzgyMDcgNi45Njk4NjMgLjQ3ODIwNyA2Ljk2OTg2MyAuMjM5MTAzUzYuNzU0NjcgMCA2LjU1MTQzMiAwSDQuNjg2NDI2QzMuMDAwNzQ3IDAgMS42MjU5MDMtMS4xNDc2OTYgMS40ODI0NDEtMi43NDk2ODlINi41NTE0MzJaJy8+CjxwYXRoIGlkPSdnMS01OScgZD0nTTIuMzMxMjU4IC4wNDc4MjFDMi4zMzEyNTgtLjY0NTU3OSAyLjEwNDExLTEuMTU5NjUxIDEuNjEzOTQ4LTEuMTU5NjUxQzEuMjMxMzgyLTEuMTU5NjUxIDEuMDQwMS0uODQ4ODE3IDEuMDQwMS0uNTg1ODAzUzEuMjE5NDI3IDAgMS42MjU5MDMgMEMxLjc4MTMyIDAgMS45MTI4MjctLjA0NzgyMSAyLjAyMDQyMy0uMTU1NDE3QzIuMDQ0MzM0LS4xNzkzMjggMi4wNTYyODktLjE3OTMyOCAyLjA2ODI0NC0uMTc5MzI4QzIuMDkyMTU0LS4xNzkzMjggMi4wOTIxNTQtLjAxMTk1NSAyLjA5MjE1NCAuMDQ3ODIxQzIuMDkyMTU0IC40NDIzNDEgMi4wMjA0MjMgMS4yMTk0MjcgMS4zMjcwMjQgMS45OTY1MTNDMS4xOTU1MTcgMi4xMzk5NzUgMS4xOTU1MTcgMi4xNjM4ODUgMS4xOTU1MTcgMi4xODc3OTZDMS4xOTU1MTcgMi4yNDc1NzIgMS4yNTUyOTMgMi4zMDczNDcgMS4zMTUwNjggMi4zMDczNDdDMS40MTA3MSAyLjMwNzM0NyAyLjMzMTI1OCAxLjQyMjY2NSAyLjMzMTI1OCAuMDQ3ODIxWicvPgo8cGF0aCBpZD0nZzEtMTIwJyBkPSdNNS42NjY3NS00Ljg3NzcwOUM1LjI4NDE4NC00LjgwNTk3OCA1LjE0MDcyMi00LjUxOTA1NCA1LjE0MDcyMi00LjI5MTkwNUM1LjE0MDcyMi00LjAwNDk4MSA1LjM2Nzg3LTMuOTA5MzQgNS41MzUyNDMtMy45MDkzNEM1Ljg5Mzg5OC0zLjkwOTM0IDYuMTQ0OTU2LTQuMjIwMTc0IDYuMTQ0OTU2LTQuNTQyOTY0QzYuMTQ0OTU2LTUuMDQ1MDgxIDUuNTcxMTA4LTUuMjcyMjI5IDUuMDY4OTkxLTUuMjcyMjI5QzQuMzM5NzI2LTUuMjcyMjI5IDMuOTMzMjUtNC41NTQ5MTkgMy44MjU2NTQtNC4zMjc3NzFDMy41NTA2ODUtNS4yMjQ0MDggMi44MDk0NjUtNS4yNzIyMjkgMi41OTQyNzEtNS4yNzIyMjlDMS4zNzQ4NDQtNS4yNzIyMjkgLjcyOTI2NS0zLjcwNjEwMiAuNzI5MjY1LTMuNDQzMDg4Qy43MjkyNjUtMy4zOTUyNjggLjc3NzA4Ni0zLjMzNTQ5MiAuODYwNzcyLTMuMzM1NDkyQy45NTY0MTMtMy4zMzU0OTIgLjk4MDMyNC0zLjQwNzIyMyAxLjAwNDIzNC0zLjQ1NTA0NEMxLjQxMDcxLTQuNzgyMDY3IDIuMjExNzA2LTUuMDMzMTI2IDIuNTU4NDA2LTUuMDMzMTI2QzMuMDk2Mzg5LTUuMDMzMTI2IDMuMjAzOTg1LTQuNTMxMDA5IDMuMjAzOTg1LTQuMjQ0MDg1QzMuMjAzOTg1LTMuOTgxMDcxIDMuMTMyMjU0LTMuNzA2MTAyIDIuOTg4NzkyLTMuMTMyMjU0TDIuNTgyMzE2LTEuNDk0Mzk2QzIuNDAyOTg5LS43NzcwODYgMi4wNTYyODktLjExOTU1MiAxLjQyMjY2NS0uMTE5NTUyQzEuMzYyODg5LS4xMTk1NTIgMS4wNjQwMS0uMTE5NTUyIC44MTI5NTEtLjI3NDk2OUMxLjI0MzMzNy0uMzU4NjU1IDEuMzM4OTc5LS43MTczMSAxLjMzODk3OS0uODYwNzcyQzEuMzM4OTc5LTEuMDk5ODc1IDEuMTU5NjUxLTEuMjQzMzM3IC45MzI1MDMtMS4yNDMzMzdDLjY0NTU3OS0xLjI0MzMzNyAuMzM0NzQ1LS45OTIyNzkgLjMzNDc0NS0uNjA5NzE0Qy4zMzQ3NDUtLjEwNzU5NyAuODk2NjM4IC4xMTk1NTIgMS40MTA3MSAuMTE5NTUyQzEuOTg0NTU4IC4xMTk1NTIgMi4zOTEwMzQtLjMzNDc0NSAyLjY0MjA5Mi0uODI0OTA3QzIuODMzMzc1LS4xMTk1NTIgMy40MzExMzMgLjExOTU1MiAzLjg3MzQ3NCAuMTE5NTUyQzUuMDkyOTAyIC4xMTk1NTIgNS43Mzg0ODEtMS40NDY1NzUgNS43Mzg0ODEtMS43MDk1ODlDNS43Mzg0ODEtMS43NjkzNjUgNS42OTA2Ni0xLjgxNzE4NiA1LjYxODkyOS0xLjgxNzE4NkM1LjUxMTMzMy0xLjgxNzE4NiA1LjQ5OTM3Ny0xLjc1NzQxIDUuNDYzNTEyLTEuNjYxNzY4QzUuMTQwNzIyLS42MDk3MTQgNC40NDczMjMtLjExOTU1MiAzLjkwOTM0LS4xMTk1NTJDMy40OTA5MDktLjExOTU1MiAzLjI2Mzc2MS0uNDMwMzg2IDMuMjYzNzYxLS45MjA1NDhDMy4yNjM3NjEtMS4xODM1NjIgMy4zMTE1ODItMS4zNzQ4NDQgMy41MDI4NjQtMi4xNjM4ODVMMy45MjEyOTUtMy43ODk3ODhDNC4xMDA2MjMtNC41MDcwOTggNC41MDcwOTgtNS4wMzMxMjYgNS4wNTcwMzYtNS4wMzMxMjZDNS4wODA5NDYtNS4wMzMxMjYgNS40MTU2OTEtNS4wMzMxMjYgNS42NjY3NS00Ljg3NzcwOVonLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzAnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS0xMjAnLz4KPHVzZSB4PSc5Ljk3MjkxNycgeT0nMCcgeGxpbms6aHJlZj0nI2cwLTUwJy8+Cjx1c2UgeD0nMjEuMjYzODg1JyB5PScwJyB4bGluazpocmVmPScjZzItOTEnLz4KPHVzZSB4PScyNC41MTU1NDYnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC0wJy8+Cjx1c2UgeD0nMzMuODE0MDQzJyB5PScwJyB4bGluazpocmVmPScjZzItNDknLz4KPHVzZSB4PSczOS42NjcwMzMnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS01OScvPgo8dXNlIHg9JzQ0LjkxMTE5MicgeT0nMCcgeGxpbms6aHJlZj0nI2cyLTQ5Jy8+Cjx1c2UgeD0nNTAuNzY0MTgyJyB5PScwJyB4bGluazpocmVmPScjZzItOTMnLz4KPC9nPgo8L3N2Zz4KPCEtLSBERVBUSD00IC0tPg==) which we draw thereafter.
which we draw thereafter.
def linearSample(xmin, xmax, npoints):
"""
Returns a sample created from a regular grid
from xmin to xmax with npoints points.
"""
step = (xmax - xmin) / (npoints - 1)
rg = ot.RegularGrid(xmin, step, npoints)
vertices = rg.getVertices()
return vertices
The boundary of the event are the lines  and
and 
a, b = -1, 1
nplot = 100 # Number of points in the plot
x = linearSample(a, b, nplot)
y = distX.computePDF(x)
def drawInTheBounds(vLow, vUp, n_test):
"""
Draw the area within the bounds.
"""
palette = ot.Drawable.BuildDefaultPalette(2)
myPaletteColor = palette[0]
polyData = [[vLow[i], vLow[i + 1], vUp[i + 1], vUp[i]] for i in range(n_test - 1)]
polygonList = [
ot.Polygon(polyData[i], myPaletteColor, myPaletteColor)
for i in range(n_test - 1)
]
boundsPoly = ot.PolygonArray(polygonList)
return boundsPoly
vLow = [[x[i, 0], 0.0] for i in range(nplot)]
vUp = [[x[i, 0], y[i, 0]] for i in range(nplot)]
area = distX.computeCDF(b) - distX.computeCDF(a)
boundsPoly = drawInTheBounds(vLow, vUp, nplot)
We add the colored area to the PDF graph.
graph = distX.drawPDF()
graph.add(boundsPoly)
graph.setTitle("Probability of the event E = %.4f" % (area))
graph.setLegends([""])
view = otv.View(graph)
Display all figures
plt.show()