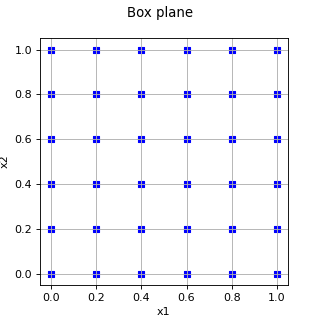
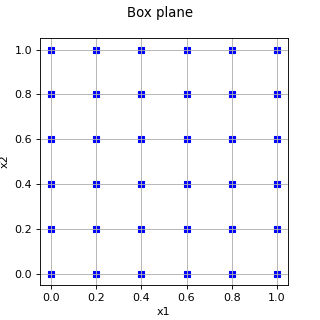
Box¶
(Source code, png)
- class Box(*args)¶
Box design of experiments.
- Available constructor:
Box(levels)
Box(levels, bounds)
- Parameters:
- levelssequence of int or float
Sequence specifying the number of intermediate points in each direction which regularly discretizes a pavement. In direction
 , the
points number is
, the
points number is ![levels[i]+2](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMiAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPSc2MC43MjA0NDVwdCcgaGVpZ2h0PScxMS45NTUxNjhwdCcgdmlld0JveD0nMCAtOC45NjYzNzYgNjAuNzIwNDQ1IDExLjk1NTE2OCc+CjxkZWZzPgo8cGF0aCBpZD0nZzEtNDMnIGQ9J000Ljc3MDExMi0yLjc2MTY0NEg4LjA2OTczOEM4LjIzNzExMS0yLjc2MTY0NCA4LjQ1MjMwNC0yLjc2MTY0NCA4LjQ1MjMwNC0yLjk3NjgzN0M4LjQ1MjMwNC0zLjIwMzk4NSA4LjI0OTA2Ni0zLjIwMzk4NSA4LjA2OTczOC0zLjIwMzk4NUg0Ljc3MDExMlYtNi41MDM2MTFDNC43NzAxMTItNi42NzA5ODQgNC43NzAxMTItNi44ODYxNzcgNC41NTQ5MTktNi44ODYxNzdDNC4zMjc3NzEtNi44ODYxNzcgNC4zMjc3NzEtNi42ODI5MzkgNC4zMjc3NzEtNi41MDM2MTFWLTMuMjAzOTg1SDEuMDI4MTQ0Qy44NjA3NzItMy4yMDM5ODUgLjY0NTU3OS0zLjIwMzk4NSAuNjQ1NTc5LTIuOTg4NzkyQy42NDU1NzktMi43NjE2NDQgLjg0ODgxNy0yLjc2MTY0NCAxLjAyODE0NC0yLjc2MTY0NEg0LjMyNzc3MVYuNTM3OTgzQzQuMzI3NzcxIC43MDUzNTUgNC4zMjc3NzEgLjkyMDU0OCA0LjU0Mjk2NCAuOTIwNTQ4QzQuNzcwMTEyIC45MjA1NDggNC43NzAxMTIgLjcxNzMxIDQuNzcwMTEyIC41Mzc5ODNWLTIuNzYxNjQ0WicvPgo8cGF0aCBpZD0nZzEtNTAnIGQ9J001LjI2MDI3NC0yLjAwODQ2OEg0Ljk5NzI2QzQuOTYxMzk1LTEuODA1MjMgNC44NjU3NTMtMS4xNDc2OTYgNC43NDYyMDItLjk1NjQxM0M0LjY2MjUxNi0uODQ4ODE3IDMuOTgxMDcxLS44NDg4MTcgMy42MjI0MTYtLjg0ODgxN0gxLjQxMDcxQzEuNzMzNDk5LTEuMTIzNzg2IDIuNDYyNzY1LTEuODg4OTE3IDIuNzczNTk5LTIuMTc1ODQxQzQuNTkwNzg1LTMuODQ5NTY0IDUuMjYwMjc0LTQuNDcxMjMzIDUuMjYwMjc0LTUuNjU0Nzk1QzUuMjYwMjc0LTcuMDI5NjM5IDQuMTcyMzU0LTcuOTUwMTg3IDIuNzg1NTU0LTcuOTUwMTg3Uy41ODU4MDMtNi43NjY2MjUgLjU4NTgwMy01LjczODQ4MUMuNTg1ODAzLTUuMTI4NzY3IDEuMTExODMxLTUuMTI4NzY3IDEuMTQ3Njk2LTUuMTI4NzY3QzEuMzk4NzU1LTUuMTI4NzY3IDEuNzA5NTg5LTUuMzA4MDk1IDEuNzA5NTg5LTUuNjkwNjZDMS43MDk1ODktNi4wMjU0MDUgMS40ODI0NDEtNi4yNTI1NTMgMS4xNDc2OTYtNi4yNTI1NTNDMS4wNDAxLTYuMjUyNTUzIDEuMDE2MTg5LTYuMjUyNTUzIC45ODAzMjQtNi4yNDA1OThDMS4yMDc0NzItNy4wNTM1NDkgMS44NTMwNTEtNy42MDM0ODcgMi42MzAxMzctNy42MDM0ODdDMy42NDYzMjYtNy42MDM0ODcgNC4yNjc5OTUtNi43NTQ2NyA0LjI2Nzk5NS01LjY1NDc5NUM0LjI2Nzk5NS00LjYzODYwNSAzLjY4MjE5Mi0zLjc1MzkyMyAzLjAwMDc0Ny0yLjk4ODc5MkwuNTg1ODAzLS4yODY5MjRWMEg0Ljk0OTQ0TDUuMjYwMjc0LTIuMDA4NDY4WicvPgo8cGF0aCBpZD0nZzEtOTEnIGQ9J00yLjk4ODc5MiAyLjk4ODc5MlYyLjU0NjQ1MUgxLjgyOTE0MVYtOC41MjQwMzVIMi45ODg3OTJWLTguOTY2Mzc2SDEuMzg2OFYyLjk4ODc5MkgyLjk4ODc5MlonLz4KPHBhdGggaWQ9J2cxLTkzJyBkPSdNMS44NTMwNTEtOC45NjYzNzZILjI1MTA1OVYtOC41MjQwMzVIMS40MTA3MVYyLjU0NjQ1MUguMjUxMDU5VjIuOTg4NzkySDEuODUzMDUxVi04Ljk2NjM3NlonLz4KPHBhdGggaWQ9J2cwLTEwMScgZD0nTTIuMTM5OTc1LTIuNzczNTk5QzIuNDYyNzY1LTIuNzczNTk5IDMuMjc1NzE2LTIuNzk3NTA5IDMuODQ5NTY0LTMuMDEyNzAyQzQuNzU4MTU3LTMuMzU5NDAyIDQuODQxODQzLTQuMDUyODAyIDQuODQxODQzLTQuMjY3OTk1QzQuODQxODQzLTQuNzk0MDIyIDQuMzg3NTQ3LTUuMjcyMjI5IDMuNTk4NTA2LTUuMjcyMjI5QzIuMzQzMjEzLTUuMjcyMjI5IC41Mzc5ODMtNC4xMzY0ODggLjUzNzk4My0yLjAwODQ2OEMuNTM3OTgzLS43NTMxNzYgMS4yNTUyOTMgLjExOTU1MiAyLjM0MzIxMyAuMTE5NTUyQzMuOTY5MTE2IC4xMTk1NTIgNC45OTcyNi0xLjE0NzY5NiA0Ljk5NzI2LTEuMzAzMTEzQzQuOTk3MjYtMS4zNzQ4NDQgNC45MjU1MjktMS40MzQ2MiA0Ljg3NzcwOS0xLjQzNDYyQzQuODQxODQzLTEuNDM0NjIgNC44Mjk4ODgtMS40MjI2NjUgNC43MjIyOTEtMS4zMTUwNjhDMy45NTcxNjEtLjI5ODg3OSAyLjgyMTQyLS4xMTk1NTIgMi4zNjcxMjMtLjExOTU1MkMxLjY4NTY3OS0uMTE5NTUyIDEuMzI3MDI0LS42NTc1MzQgMS4zMjcwMjQtMS41NDIyMTdDMS4zMjcwMjQtMS43MDk1ODkgMS4zMjcwMjQtMi4wMDg0NjggMS41MDYzNTEtMi43NzM1OTlIMi4xMzk5NzVaTTEuNTY2MTI3LTMuMDEyNzAyQzIuMDgwMTk5LTQuODUzNzk4IDMuMjE1OTQtNS4wMzMxMjYgMy41OTg1MDYtNS4wMzMxMjZDNC4xMjQ1MzMtNS4wMzMxMjYgNC40ODMxODgtNC43MjIyOTEgNC40ODMxODgtNC4yNjc5OTVDNC40ODMxODgtMy4wMTI3MDIgMi41NzAzNjEtMy4wMTI3MDIgMi4wNjgyNDQtMy4wMTI3MDJIMS41NjYxMjdaJy8+CjxwYXRoIGlkPSdnMC0xMDUnIGQ9J00zLjM4MzMxMy0xLjcwOTU4OUMzLjM4MzMxMy0xLjc2OTM2NSAzLjMzNTQ5Mi0xLjgxNzE4NiAzLjI2Mzc2MS0xLjgxNzE4NkMzLjE1NjE2NC0xLjgxNzE4NiAzLjE0NDIwOS0xLjc4MTMyIDMuMDg0NDMzLTEuNTc4MDgyQzIuNzczNTk5LS40OTAxNjIgMi4yODM0MzctLjExOTU1MiAxLjg4ODkxNy0uMTE5NTUyQzEuNzQ1NDU1LS4xMTk1NTIgMS41NzgwODItLjE1NTQxNyAxLjU3ODA4Mi0uNTE0MDcyQzEuNTc4MDgyLS44MzY4NjIgMS43MjE1NDQtMS4xOTU1MTcgMS44NTMwNTEtMS41NTQxNzJMMi42ODk5MTMtMy43Nzc4MzNDMi43MjU3NzgtMy44NzM0NzQgMi44MDk0NjUtNC4wODg2NjcgMi44MDk0NjUtNC4zMTU4MTZDMi44MDk0NjUtNC44MTc5MzMgMi40NTA4MDktNS4yNzIyMjkgMS44NjUwMDYtNS4yNzIyMjlDLjc2NTEzMS01LjI3MjIyOSAuMzIyNzktMy41Mzg3MyAuMzIyNzktMy40NDMwODhDLjMyMjc5LTMuMzk1MjY4IC4zNzA2MS0zLjMzNTQ5MiAuNDU0Mjk2LTMuMzM1NDkyQy41NjE4OTMtMy4zMzU0OTIgLjU3Mzg0OC0zLjM4MzMxMyAuNjIxNjY5LTMuNTUwNjg1Qy45MDg1OTMtNC41NTQ5MTkgMS4zNjI4ODktNS4wMzMxMjYgMS44MjkxNDEtNS4wMzMxMjZDMS45MzY3MzctNS4wMzMxMjYgMi4xMzk5NzUtNS4wMjExNzEgMi4xMzk5NzUtNC42Mzg2MDVDMi4xMzk5NzUtNC4zMjc3NzEgMS45ODQ1NTgtMy45MzMyNSAxLjg4ODkxNy0zLjY3MDIzN0wxLjA1MjA1NS0xLjQ0NjU3NUMuOTgwMzI0LTEuMjU1MjkzIC45MDg1OTMtMS4wNjQwMSAuOTA4NTkzLS44NDg4MTdDLjkwODU5My0uMzEwODM0IDEuMjc5MjAzIC4xMTk1NTIgMS44NTMwNTEgLjExOTU1MkMyLjk1MjkyNyAuMTE5NTUyIDMuMzgzMzEzLTEuNjI1OTAzIDMuMzgzMzEzLTEuNzA5NTg5Wk0zLjI4NzY3MS03LjQ2MDAyNUMzLjI4NzY3MS03LjYzOTM1MiAzLjE0NDIwOS03Ljg1NDU0NSAyLjg4MTE5Ni03Ljg1NDU0NUMyLjYwNjIyNy03Ljg1NDU0NSAyLjI5NTM5Mi03LjU5MTUzMiAyLjI5NTM5Mi03LjI4MDY5N0MyLjI5NTM5Mi02Ljk4MTgxOCAyLjU0NjQ1MS02Ljg4NjE3NyAyLjY4OTkxMy02Ljg4NjE3N0MzLjAxMjcwMi02Ljg4NjE3NyAzLjI4NzY3MS03LjE5NzAxMSAzLjI4NzY3MS03LjQ2MDAyNVonLz4KPHBhdGggaWQ9J2cwLTEwOCcgZD0nTTMuMDM2NjEzLTcuOTk4MDA3QzMuMDQ4NTY4LTguMDQ1ODI4IDMuMDcyNDc4LTguMTE3NTU5IDMuMDcyNDc4LTguMTc3MzM1QzMuMDcyNDc4LTguMjk2ODg3IDIuOTUyOTI3LTguMjk2ODg3IDIuOTI5MDE2LTguMjk2ODg3QzIuOTE3MDYxLTguMjk2ODg3IDIuNDg2Njc1LTguMjYxMDIxIDIuMjcxNDgyLTguMjM3MTExQzIuMDY4MjQ0LTguMjI1MTU2IDEuODg4OTE3LTguMjAxMjQ1IDEuNjczNzI0LTguMTg5MjlDMS4zODY4LTguMTY1MzggMS4zMDMxMTMtOC4xNTM0MjUgMS4zMDMxMTMtNy45MzgyMzJDMS4zMDMxMTMtNy44MTg2OCAxLjQyMjY2NS03LjgxODY4IDEuNTQyMjE3LTcuODE4NjhDMi4xNTE5My03LjgxODY4IDIuMTUxOTMtNy43MTEwODMgMi4xNTE5My03LjU5MTUzMkMyLjE1MTkzLTcuNTQzNzExIDIuMTUxOTMtNy41MTk4MDEgMi4wOTIxNTQtNy4zMDQ2MDhMLjYwOTcxNC0xLjM3NDg0NEMuNTczODQ4LTEuMjQzMzM3IC41NDk5MzgtMS4xNDc2OTYgLjU0OTkzOC0uOTU2NDEzQy41NDk5MzgtLjM1ODY1NSAuOTkyMjc5IC4xMTk1NTIgMS42MDE5OTMgLjExOTU1MkMxLjk5NjUxMyAuMTE5NTUyIDIuMjU5NTI3LS4xNDM0NjIgMi40NTA4MDktLjUxNDA3MkMyLjY1NDA0Ny0uOTA4NTkzIDIuODIxNDItMS42NjE3NjggMi44MjE0Mi0xLjcwOTU4OUMyLjgyMTQyLTEuNzY5MzY1IDIuNzczNTk5LTEuODE3MTg2IDIuNzAxODY4LTEuODE3MTg2QzIuNTk0MjcxLTEuODE3MTg2IDIuNTgyMzE2LTEuNzU3NDEgMi41MzQ0OTYtMS41NzgwODJDMi4zMTkzMDMtLjc1MzE3NiAyLjEwNDExLS4xMTk1NTIgMS42MjU5MDMtLjExOTU1MkMxLjI2NzI0OC0uMTE5NTUyIDEuMjY3MjQ4LS41MDIxMTcgMS4yNjcyNDgtLjY2OTQ4OUMxLjI2NzI0OC0uNzE3MzEgMS4yNjcyNDgtLjk2ODM2OSAxLjM1MDkzNC0xLjMwMzExM0wzLjAzNjYxMy03Ljk5ODAwN1onLz4KPHBhdGggaWQ9J2cwLTExNScgZD0nTTIuNzI1Nzc4LTIuMzkxMDM0QzIuOTI5MDE2LTIuMzU1MTY4IDMuMjUxODA2LTIuMjgzNDM3IDMuMzIzNTM3LTIuMjcxNDgyQzMuNDc4OTU0LTIuMjIzNjYxIDQuMDE2OTM2LTIuMDMyMzc5IDQuMDE2OTM2LTEuNDU4NTMxQzQuMDE2OTM2LTEuMDg3OTIgMy42ODIxOTItLjExOTU1MiAyLjI5NTM5Mi0uMTE5NTUyQzIuMDQ0MzM0LS4xMTk1NTIgMS4xNDc2OTYtLjE1NTQxNyAuOTA4NTkzLS44MTI5NTFDMS4zODY4LS43NTMxNzYgMS42MjU5MDMtMS4xMjM3ODYgMS42MjU5MDMtMS4zODY4QzEuNjI1OTAzLTEuNjM3ODU4IDEuNDU4NTMxLTEuNzY5MzY1IDEuMjE5NDI3LTEuNzY5MzY1Qy45NTY0MTMtMS43NjkzNjUgLjYwOTcxNC0xLjU2NjEyNyAuNjA5NzE0LTEuMDI4MTQ0Qy42MDk3MTQtLjMyMjc5IDEuMzI3MDI0IC4xMTk1NTIgMi4yODM0MzcgLjExOTU1MkM0LjEwMDYyMyAuMTE5NTUyIDQuNjM4NjA1LTEuMjE5NDI3IDQuNjM4NjA1LTEuODQxMDk2QzQuNjM4NjA1LTIuMDIwNDIzIDQuNjM4NjA1LTIuMzU1MTY4IDQuMjU2MDQtMi43Mzc3MzNDMy45NTcxNjEtMy4wMjQ2NTggMy42NzAyMzctMy4wODQ0MzMgMy4wMjQ2NTgtMy4yMTU5NEMyLjcwMTg2OC0zLjI4NzY3MSAyLjE4Nzc5Ni0zLjM5NTI2OCAyLjE4Nzc5Ni0zLjkzMzI1QzIuMTg3Nzk2LTQuMTcyMzU0IDIuNDAyOTg5LTUuMDMzMTI2IDMuNTM4NzMtNS4wMzMxMjZDNC4wNDA4NDctNS4wMzMxMjYgNC41MzEwMDktNC44NDE4NDMgNC42NTA1Ni00LjQxMTQ1N0M0LjEyNDUzMy00LjQxMTQ1NyA0LjEwMDYyMy0zLjk1NzE2MSA0LjEwMDYyMy0zLjk0NTIwNUM0LjEwMDYyMy0zLjY5NDE0NyA0LjMyNzc3MS0zLjYyMjQxNiA0LjQzNTM2Ny0zLjYyMjQxNkM0LjYwMjc0LTMuNjIyNDE2IDQuOTM3NDg0LTMuNzUzOTIzIDQuOTM3NDg0LTQuMjU2MDRTNC40ODMxODgtNS4yNzIyMjkgMy41NTA2ODUtNS4yNzIyMjlDMS45ODQ1NTgtNS4yNzIyMjkgMS41NjYxMjctNC4wNDA4NDcgMS41NjYxMjctMy41NTA2ODVDMS41NjYxMjctMi42NDIwOTIgMi40NTA4MDktMi40NTA4MDkgMi43MjU3NzgtMi4zOTEwMzRaJy8+CjxwYXRoIGlkPSdnMC0xMTgnIGQ9J001LjQ2MzUxMi00LjQ3MTIzM0M1LjQ2MzUxMi01LjIyNDQwOCA1LjA4MDk0Ni01LjI3MjIyOSA0Ljk4NTMwNS01LjI3MjIyOUM0LjY5ODM4MS01LjI3MjIyOSA0LjQzNTM2Ny00Ljk4NTMwNSA0LjQzNTM2Ny00Ljc0NjIwMkM0LjQzNTM2Ny00LjYwMjc0IDQuNTE5MDU0LTQuNTE5MDU0IDQuNTY2ODc0LTQuNDcxMjMzQzQuNjg2NDI2LTQuMzYzNjM2IDQuOTk3MjYtNC4wNDA4NDcgNC45OTcyNi0zLjQxOTE3OEM0Ljk5NzI2LTIuOTE3MDYxIDQuMjc5OTUtLjExOTU1MiAyLjg0NTMzLS4xMTk1NTJDMi4xMTYwNjUtLjExOTU1MiAxLjk3MjYwMy0uNzI5MjY1IDEuOTcyNjAzLTEuMTcxNjA2QzEuOTcyNjAzLTEuNzY5MzY1IDIuMjQ3NTcyLTIuNjA2MjI3IDIuNTcwMzYxLTMuNDY2OTk5QzIuNzYxNjQ0LTMuOTU3MTYxIDIuODA5NDY1LTQuMDc2NzEyIDIuODA5NDY1LTQuMzE1ODE2QzIuODA5NDY1LTQuODE3OTMzIDIuNDUwODA5LTUuMjcyMjI5IDEuODY1MDA2LTUuMjcyMjI5Qy43NjUxMzEtNS4yNzIyMjkgLjMyMjc5LTMuNTM4NzMgLjMyMjc5LTMuNDQzMDg4Qy4zMjI3OS0zLjM5NTI2OCAuMzcwNjEtMy4zMzU0OTIgLjQ1NDI5Ni0zLjMzNTQ5MkMuNTYxODkzLTMuMzM1NDkyIC41NzM4NDgtMy4zODMzMTMgLjYyMTY2OS0zLjU1MDY4NUMuOTA4NTkzLTQuNTc4ODI5IDEuMzc0ODQ0LTUuMDMzMTI2IDEuODI5MTQxLTUuMDMzMTI2QzEuOTM2NzM3LTUuMDMzMTI2IDIuMTM5OTc1LTUuMDMzMTI2IDIuMTM5OTc1LTQuNjM4NjA1QzIuMTM5OTc1LTQuMzI3NzcxIDIuMDA4NDY4LTMuOTgxMDcxIDEuODI5MTQxLTMuNTI2Nzc1QzEuMjU1MjkzLTEuOTk2NTEzIDEuMjU1MjkzLTEuNjI1OTAzIDEuMjU1MjkzLTEuMzM4OTc5QzEuMjU1MjkzLTEuMDc1OTY1IDEuMjkxMTU4LS41ODU4MDMgMS42NjE3NjgtLjI1MTA1OUMyLjA5MjE1NCAuMTE5NTUyIDIuNjg5OTEzIC4xMTk1NTIgMi43OTc1MDkgLjExOTU1MkM0Ljc4MjA2NyAuMTE5NTUyIDUuNDYzNTEyLTMuNzg5Nzg4IDUuNDYzNTEyLTQuNDcxMjMzWicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMCcgeT0nMCcgeGxpbms6aHJlZj0nI2cwLTEwOCcvPgo8dXNlIHg9JzMuNzQ5ODA4JyB5PScwJyB4bGluazpocmVmPScjZzAtMTAxJy8+Cjx1c2UgeD0nOS4xNzUyNDknIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC0xMTgnLz4KPHVzZSB4PScxNS4yNjM0NjcnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC0xMDEnLz4KPHVzZSB4PScyMC42ODg5MDgnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC0xMDgnLz4KPHVzZSB4PScyNC40Mzg3MTYnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC0xMTUnLz4KPHVzZSB4PScyOS45NTI3MjInIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS05MScvPgo8dXNlIHg9JzMzLjIwNDM4MycgeT0nMCcgeGxpbms6aHJlZj0nI2cwLTEwNScvPgo8dXNlIHg9JzM3LjE5NzgxNScgeT0nMCcgeGxpbms6aHJlZj0nI2cxLTkzJy8+Cjx1c2UgeD0nNDMuMTA2MTQnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS00MycvPgo8dXNlIHg9JzU0Ljg2NzQ1NScgeT0nMCcgeGxpbms6aHJlZj0nI2cxLTUwJy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9NCAtLT4=) .
.- bounds
Interval The bounds of the pavement If not specified, the bounds are set to the unit pavement
![[0,1]^n](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMiAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPScyOC41OTE2NjRwdCcgaGVpZ2h0PScxMS45NTUxNjhwdCcgdmlld0JveD0nMCAtOC45NjYzNzYgMjguNTkxNjY0IDExLjk1NTE2OCc+CjxkZWZzPgo8cGF0aCBpZD0nZzAtMTEwJyBkPSdNMS41OTQwMjItMS4zMDcwOThDMS42MTc5MzMtMS40MjY2NSAxLjY5NzYzNC0xLjcyOTUxNCAxLjcyMTU0NC0xLjg0OTA2NkMxLjgzMzEyNi0yLjI3OTQ1MiAxLjgzMzEyNi0yLjI4NzQyMiAyLjAxNjQzOC0yLjU1MDQzNkMyLjI3OTQ1Mi0yLjk0MDk3MSAyLjY1NDA0Ny0zLjI5MTY1NiAzLjE4ODA0NS0zLjI5MTY1NkMzLjQ3NDk2OS0zLjI5MTY1NiAzLjY0MjM0MS0zLjEyNDI4NCAzLjY0MjM0MS0yLjc0OTY4OUMzLjY0MjM0MS0yLjMxMTMzMyAzLjMwNzU5Ny0xLjQwMjc0IDMuMTU2MTY0LTEuMDEyMjA0QzMuMDUyNTUzLS43NDkxOTEgMy4wNTI1NTMtLjcwMTM3IDMuMDUyNTUzLS41OTc3NThDMy4wNTI1NTMtLjE0MzQ2MiAzLjQyNzE0OCAuMDc5NzAxIDMuNzY5ODYzIC4wNzk3MDFDNC41NTA5MzQgLjA3OTcwMSA0Ljg3NzcwOS0xLjAzNjExNSA0Ljg3NzcwOS0xLjEzOTcyNkM0Ljg3NzcwOS0xLjIxOTQyNyA0LjgxMzk0OC0xLjI0MzMzNyA0Ljc1ODE1Ny0xLjI0MzMzN0M0LjY2MjUxNi0xLjI0MzMzNyA0LjY0NjU3NS0xLjE4NzU0NyA0LjYyMjY2NS0xLjEwNzg0NkM0LjQzMTM4Mi0uNDU0Mjk2IDQuMDk2NjM4LS4xNDM0NjIgMy43OTM3NzMtLjE0MzQ2MkMzLjY2NjI1Mi0uMTQzNDYyIDMuNjAyNDkxLS4yMjMxNjMgMy42MDI0OTEtLjQwNjQ3NlMzLjY2NjI1Mi0uNzY1MTMxIDMuNzQ1OTUzLS45NjQzODRDMy44NjU1MDQtMS4yNjcyNDggNC4yMTYxODktMi4xODM4MTEgNC4yMTYxODktMi42MzAxMzdDNC4yMTYxODktMy4yMjc4OTUgMy44MDE3NDMtMy41MTQ4MTkgMy4yMjc4OTUtMy41MTQ4MTlDMi41ODIzMTYtMy41MTQ4MTkgMi4xNjc4Ny0zLjEyNDI4NCAxLjkzNjczNy0yLjgyMTQyQzEuODgwOTQ2LTMuMjU5Nzc2IDEuNTMwMjYyLTMuNTE0ODE5IDEuMTIzNzg2LTMuNTE0ODE5Qy44MzY4NjItMy41MTQ4MTkgLjYzNzYwOS0zLjMzMTUwNyAuNTEwMDg3LTMuMDg0NDMzQy4zMTg4MDQtMi43MDk4MzggLjIzOTEwMy0yLjMxMTMzMyAuMjM5MTAzLTIuMjk1MzkyQy4yMzkxMDMtMi4yMjM2NjEgLjI5NDg5NC0yLjE5MTc4MSAuMzU4NjU1LTIuMTkxNzgxQy40NjIyNjctMi4xOTE3ODEgLjQ3MDIzNy0yLjIyMzY2MSAuNTI2MDI3LTIuNDMwODg0Qy42MjE2NjktMi44MjE0MiAuNzY1MTMxLTMuMjkxNjU2IDEuMDk5ODc1LTMuMjkxNjU2QzEuMzA3MDk4LTMuMjkxNjU2IDEuMzU0OTE5LTMuMDkyNDAzIDEuMzU0OTE5LTIuOTE3MDYxQzEuMzU0OTE5LTIuNzczNTk5IDEuMzE1MDY4LTIuNjIyMTY3IDEuMjUxMzA4LTIuMzU5MTUzQzEuMjM1MzY3LTIuMjk1MzkyIDEuMTE1ODE2LTEuODI1MTU2IDEuMDgzOTM1LTEuNzEzNTc0TC43ODkwNDEtLjUxODA1N0MuNzU3MTYxLS4zOTg1MDYgLjcwOTM0LS4xOTkyNTMgLjcwOTM0LS4xNjczNzJDLjcwOTM0IC4wMTU5NCAuODYwNzcyIC4wNzk3MDEgLjk2NDM4NCAuMDc5NzAxQzEuMTA3ODQ2IC4wNzk3MDEgMS4yMjczOTctLjAxNTk0IDEuMjgzMTg4LS4xMTE1ODJDMS4zMDcwOTgtLjE1OTQwMiAxLjM3MDg1OS0uNDMwMzg2IDEuNDEwNzEtLjU5Nzc1OEwxLjU5NDAyMi0xLjMwNzA5OFonLz4KPHBhdGggaWQ9J2cxLTU5JyBkPSdNMi4zMzEyNTggLjA0NzgyMUMyLjMzMTI1OC0uNjQ1NTc5IDIuMTA0MTEtMS4xNTk2NTEgMS42MTM5NDgtMS4xNTk2NTFDMS4yMzEzODItMS4xNTk2NTEgMS4wNDAxLS44NDg4MTcgMS4wNDAxLS41ODU4MDNTMS4yMTk0MjcgMCAxLjYyNTkwMyAwQzEuNzgxMzIgMCAxLjkxMjgyNy0uMDQ3ODIxIDIuMDIwNDIzLS4xNTU0MTdDMi4wNDQzMzQtLjE3OTMyOCAyLjA1NjI4OS0uMTc5MzI4IDIuMDY4MjQ0LS4xNzkzMjhDMi4wOTIxNTQtLjE3OTMyOCAyLjA5MjE1NC0uMDExOTU1IDIuMDkyMTU0IC4wNDc4MjFDMi4wOTIxNTQgLjQ0MjM0MSAyLjAyMDQyMyAxLjIxOTQyNyAxLjMyNzAyNCAxLjk5NjUxM0MxLjE5NTUxNyAyLjEzOTk3NSAxLjE5NTUxNyAyLjE2Mzg4NSAxLjE5NTUxNyAyLjE4Nzc5NkMxLjE5NTUxNyAyLjI0NzU3MiAxLjI1NTI5MyAyLjMwNzM0NyAxLjMxNTA2OCAyLjMwNzM0N0MxLjQxMDcxIDIuMzA3MzQ3IDIuMzMxMjU4IDEuNDIyNjY1IDIuMzMxMjU4IC4wNDc4MjFaJy8+CjxwYXRoIGlkPSdnMi00OCcgZD0nTTUuMzU1OTE1LTMuODI1NjU0QzUuMzU1OTE1LTQuODE3OTMzIDUuMjk2MTM5LTUuNzg2MzAxIDQuODY1NzUzLTYuNjk0ODk0QzQuMzc1NTkyLTcuNjg3MTczIDMuNTE0ODE5LTcuOTUwMTg3IDIuOTI5MDE2LTcuOTUwMTg3QzIuMjM1NjE2LTcuOTUwMTg3IDEuMzg2OC03LjYwMzQ4NyAuOTQ0NDU4LTYuNjExMjA4Qy42MDk3MTQtNS44NTgwMzIgLjQ5MDE2Mi01LjExNjgxMiAuNDkwMTYyLTMuODI1NjU0Qy40OTAxNjItMi42NjYwMDIgLjU3Mzg0OC0xLjc5MzI3NSAxLjAwNDIzNC0uOTQ0NDU4QzEuNDcwNDg2LS4wMzU4NjYgMi4yOTUzOTIgLjI1MTA1OSAyLjkxNzA2MSAuMjUxMDU5QzMuOTU3MTYxIC4yNTEwNTkgNC41NTQ5MTktLjM3MDYxIDQuOTAxNjE5LTEuMDY0MDFDNS4zMzIwMDUtMS45NjA2NDggNS4zNTU5MTUtMy4xMzIyNTQgNS4zNTU5MTUtMy44MjU2NTRaTTIuOTE3MDYxIC4wMTE5NTVDMi41MzQ0OTYgLjAxMTk1NSAxLjc1NzQxLS4yMDMyMzggMS41MzAyNjItMS41MDYzNTFDMS4zOTg3NTUtMi4yMjM2NjEgMS4zOTg3NTUtMy4xMzIyNTQgMS4zOTg3NTUtMy45NjkxMTZDMS4zOTg3NTUtNC45NDk0NCAxLjM5ODc1NS01LjgzNDEyMiAxLjU5MDAzNy02LjUzOTQ3N0MxLjc5MzI3NS03LjM0MDQ3MyAyLjQwMjk4OS03LjcxMTA4MyAyLjkxNzA2MS03LjcxMTA4M0MzLjM3MTM1Ny03LjcxMTA4MyA0LjA2NDc1Ny03LjQzNjExNSA0LjI5MTkwNS02LjQwNzk3QzQuNDQ3MzIzLTUuNzI2NTI2IDQuNDQ3MzIzLTQuNzgyMDY3IDQuNDQ3MzIzLTMuOTY5MTE2QzQuNDQ3MzIzLTMuMTY4MTIgNC40NDczMjMtMi4yNTk1MjcgNC4zMTU4MTYtMS41MzAyNjJDNC4wODg2NjctLjIxNTE5MyAzLjMzNTQ5MiAuMDExOTU1IDIuOTE3MDYxIC4wMTE5NTVaJy8+CjxwYXRoIGlkPSdnMi00OScgZD0nTTMuNDQzMDg4LTcuNjYzMjYzQzMuNDQzMDg4LTcuOTM4MjMyIDMuNDQzMDg4LTcuOTUwMTg3IDMuMjAzOTg1LTcuOTUwMTg3QzIuOTE3MDYxLTcuNjI3Mzk3IDIuMzE5MzAzLTcuMTg1MDU2IDEuMDg3OTItNy4xODUwNTZWLTYuODM4MzU2QzEuMzYyODg5LTYuODM4MzU2IDEuOTYwNjQ4LTYuODM4MzU2IDIuNjE4MTgyLTcuMTQ5MTkxVi0uOTIwNTQ4QzIuNjE4MTgyLS40OTAxNjIgMi41ODIzMTYtLjM0NjcgMS41MzAyNjItLjM0NjdIMS4xNTk2NTFWMEMxLjQ4MjQ0MS0uMDIzOTEgMi42NDIwOTItLjAyMzkxIDMuMDM2NjEzLS4wMjM5MVM0LjU3ODgyOS0uMDIzOTEgNC45MDE2MTkgMFYtLjM0NjdINC41MzEwMDlDMy40Nzg5NTQtLjM0NjcgMy40NDMwODgtLjQ5MDE2MiAzLjQ0MzA4OC0uOTIwNTQ4Vi03LjY2MzI2M1onLz4KPHBhdGggaWQ9J2cyLTkxJyBkPSdNMi45ODg3OTIgMi45ODg3OTJWMi41NDY0NTFIMS44MjkxNDFWLTguNTI0MDM1SDIuOTg4NzkyVi04Ljk2NjM3NkgxLjM4NjhWMi45ODg3OTJIMi45ODg3OTJaJy8+CjxwYXRoIGlkPSdnMi05MycgZD0nTTEuODUzMDUxLTguOTY2Mzc2SC4yNTEwNTlWLTguNTI0MDM1SDEuNDEwNzFWMi41NDY0NTFILjI1MTA1OVYyLjk4ODc5MkgxLjg1MzA1MVYtOC45NjYzNzZaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PScwJyB5PScwJyB4bGluazpocmVmPScjZzItOTEnLz4KPHVzZSB4PSczLjI1MTY2MScgeT0nMCcgeGxpbms6aHJlZj0nI2cyLTQ4Jy8+Cjx1c2UgeD0nOS4xMDQ2NTInIHk9JzAnIHhsaW5rOmhyZWY9JyNnMS01OScvPgo8dXNlIHg9JzE0LjM0ODgxJyB5PScwJyB4bGluazpocmVmPScjZzItNDknLz4KPHVzZSB4PScyMC4yMDE4MDEnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMi05MycvPgo8dXNlIHg9JzIzLjQ1MzQ2MicgeT0nLTQuMzM4NDM3JyB4bGluazpocmVmPScjZzAtMTEwJy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9NCAtLT4=) .
.
See also
Notes
Box is a stratified design of experiments enabling to create a points grid by regularly discretizing a pavement with the number of intermediate points specified in each direction. The number of points generated is
![\prod_{i=1}^n (2+levels[i])](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMiAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPSc5NS4zMTgwNzVwdCcgaGVpZ2h0PScxMi43MzAxODVwdCcgdmlld0JveD0nMCAtOS4yNDMxODUgOTUuMzE4MDc1IDEyLjczMDE4NSc+CjxkZWZzPgo8cGF0aCBpZD0nZzItMTAxJyBkPSdNMi4xMzk5NzUtMi43NzM1OTlDMi40NjI3NjUtMi43NzM1OTkgMy4yNzU3MTYtMi43OTc1MDkgMy44NDk1NjQtMy4wMTI3MDJDNC43NTgxNTctMy4zNTk0MDIgNC44NDE4NDMtNC4wNTI4MDIgNC44NDE4NDMtNC4yNjc5OTVDNC44NDE4NDMtNC43OTQwMjIgNC4zODc1NDctNS4yNzIyMjkgMy41OTg1MDYtNS4yNzIyMjlDMi4zNDMyMTMtNS4yNzIyMjkgLjUzNzk4My00LjEzNjQ4OCAuNTM3OTgzLTIuMDA4NDY4Qy41Mzc5ODMtLjc1MzE3NiAxLjI1NTI5MyAuMTE5NTUyIDIuMzQzMjEzIC4xMTk1NTJDMy45NjkxMTYgLjExOTU1MiA0Ljk5NzI2LTEuMTQ3Njk2IDQuOTk3MjYtMS4zMDMxMTNDNC45OTcyNi0xLjM3NDg0NCA0LjkyNTUyOS0xLjQzNDYyIDQuODc3NzA5LTEuNDM0NjJDNC44NDE4NDMtMS40MzQ2MiA0LjgyOTg4OC0xLjQyMjY2NSA0LjcyMjI5MS0xLjMxNTA2OEMzLjk1NzE2MS0uMjk4ODc5IDIuODIxNDItLjExOTU1MiAyLjM2NzEyMy0uMTE5NTUyQzEuNjg1Njc5LS4xMTk1NTIgMS4zMjcwMjQtLjY1NzUzNCAxLjMyNzAyNC0xLjU0MjIxN0MxLjMyNzAyNC0xLjcwOTU4OSAxLjMyNzAyNC0yLjAwODQ2OCAxLjUwNjM1MS0yLjc3MzU5OUgyLjEzOTk3NVpNMS41NjYxMjctMy4wMTI3MDJDMi4wODAxOTktNC44NTM3OTggMy4yMTU5NC01LjAzMzEyNiAzLjU5ODUwNi01LjAzMzEyNkM0LjEyNDUzMy01LjAzMzEyNiA0LjQ4MzE4OC00LjcyMjI5MSA0LjQ4MzE4OC00LjI2Nzk5NUM0LjQ4MzE4OC0zLjAxMjcwMiAyLjU3MDM2MS0zLjAxMjcwMiAyLjA2ODI0NC0zLjAxMjcwMkgxLjU2NjEyN1onLz4KPHBhdGggaWQ9J2cyLTEwNScgZD0nTTMuMzgzMzEzLTEuNzA5NTg5QzMuMzgzMzEzLTEuNzY5MzY1IDMuMzM1NDkyLTEuODE3MTg2IDMuMjYzNzYxLTEuODE3MTg2QzMuMTU2MTY0LTEuODE3MTg2IDMuMTQ0MjA5LTEuNzgxMzIgMy4wODQ0MzMtMS41NzgwODJDMi43NzM1OTktLjQ5MDE2MiAyLjI4MzQzNy0uMTE5NTUyIDEuODg4OTE3LS4xMTk1NTJDMS43NDU0NTUtLjExOTU1MiAxLjU3ODA4Mi0uMTU1NDE3IDEuNTc4MDgyLS41MTQwNzJDMS41NzgwODItLjgzNjg2MiAxLjcyMTU0NC0xLjE5NTUxNyAxLjg1MzA1MS0xLjU1NDE3MkwyLjY4OTkxMy0zLjc3NzgzM0MyLjcyNTc3OC0zLjg3MzQ3NCAyLjgwOTQ2NS00LjA4ODY2NyAyLjgwOTQ2NS00LjMxNTgxNkMyLjgwOTQ2NS00LjgxNzkzMyAyLjQ1MDgwOS01LjI3MjIyOSAxLjg2NTAwNi01LjI3MjIyOUMuNzY1MTMxLTUuMjcyMjI5IC4zMjI3OS0zLjUzODczIC4zMjI3OS0zLjQ0MzA4OEMuMzIyNzktMy4zOTUyNjggLjM3MDYxLTMuMzM1NDkyIC40NTQyOTYtMy4zMzU0OTJDLjU2MTg5My0zLjMzNTQ5MiAuNTczODQ4LTMuMzgzMzEzIC42MjE2NjktMy41NTA2ODVDLjkwODU5My00LjU1NDkxOSAxLjM2Mjg4OS01LjAzMzEyNiAxLjgyOTE0MS01LjAzMzEyNkMxLjkzNjczNy01LjAzMzEyNiAyLjEzOTk3NS01LjAyMTE3MSAyLjEzOTk3NS00LjYzODYwNUMyLjEzOTk3NS00LjMyNzc3MSAxLjk4NDU1OC0zLjkzMzI1IDEuODg4OTE3LTMuNjcwMjM3TDEuMDUyMDU1LTEuNDQ2NTc1Qy45ODAzMjQtMS4yNTUyOTMgLjkwODU5My0xLjA2NDAxIC45MDg1OTMtLjg0ODgxN0MuOTA4NTkzLS4zMTA4MzQgMS4yNzkyMDMgLjExOTU1MiAxLjg1MzA1MSAuMTE5NTUyQzIuOTUyOTI3IC4xMTk1NTIgMy4zODMzMTMtMS42MjU5MDMgMy4zODMzMTMtMS43MDk1ODlaTTMuMjg3NjcxLTcuNDYwMDI1QzMuMjg3NjcxLTcuNjM5MzUyIDMuMTQ0MjA5LTcuODU0NTQ1IDIuODgxMTk2LTcuODU0NTQ1QzIuNjA2MjI3LTcuODU0NTQ1IDIuMjk1MzkyLTcuNTkxNTMyIDIuMjk1MzkyLTcuMjgwNjk3QzIuMjk1MzkyLTYuOTgxODE4IDIuNTQ2NDUxLTYuODg2MTc3IDIuNjg5OTEzLTYuODg2MTc3QzMuMDEyNzAyLTYuODg2MTc3IDMuMjg3NjcxLTcuMTk3MDExIDMuMjg3NjcxLTcuNDYwMDI1WicvPgo8cGF0aCBpZD0nZzItMTA4JyBkPSdNMy4wMzY2MTMtNy45OTgwMDdDMy4wNDg1NjgtOC4wNDU4MjggMy4wNzI0NzgtOC4xMTc1NTkgMy4wNzI0NzgtOC4xNzczMzVDMy4wNzI0NzgtOC4yOTY4ODcgMi45NTI5MjctOC4yOTY4ODcgMi45MjkwMTYtOC4yOTY4ODdDMi45MTcwNjEtOC4yOTY4ODcgMi40ODY2NzUtOC4yNjEwMjEgMi4yNzE0ODItOC4yMzcxMTFDMi4wNjgyNDQtOC4yMjUxNTYgMS44ODg5MTctOC4yMDEyNDUgMS42NzM3MjQtOC4xODkyOUMxLjM4NjgtOC4xNjUzOCAxLjMwMzExMy04LjE1MzQyNSAxLjMwMzExMy03LjkzODIzMkMxLjMwMzExMy03LjgxODY4IDEuNDIyNjY1LTcuODE4NjggMS41NDIyMTctNy44MTg2OEMyLjE1MTkzLTcuODE4NjggMi4xNTE5My03LjcxMTA4MyAyLjE1MTkzLTcuNTkxNTMyQzIuMTUxOTMtNy41NDM3MTEgMi4xNTE5My03LjUxOTgwMSAyLjA5MjE1NC03LjMwNDYwOEwuNjA5NzE0LTEuMzc0ODQ0Qy41NzM4NDgtMS4yNDMzMzcgLjU0OTkzOC0xLjE0NzY5NiAuNTQ5OTM4LS45NTY0MTNDLjU0OTkzOC0uMzU4NjU1IC45OTIyNzkgLjExOTU1MiAxLjYwMTk5MyAuMTE5NTUyQzEuOTk2NTEzIC4xMTk1NTIgMi4yNTk1MjctLjE0MzQ2MiAyLjQ1MDgwOS0uNTE0MDcyQzIuNjU0MDQ3LS45MDg1OTMgMi44MjE0Mi0xLjY2MTc2OCAyLjgyMTQyLTEuNzA5NTg5QzIuODIxNDItMS43NjkzNjUgMi43NzM1OTktMS44MTcxODYgMi43MDE4NjgtMS44MTcxODZDMi41OTQyNzEtMS44MTcxODYgMi41ODIzMTYtMS43NTc0MSAyLjUzNDQ5Ni0xLjU3ODA4MkMyLjMxOTMwMy0uNzUzMTc2IDIuMTA0MTEtLjExOTU1MiAxLjYyNTkwMy0uMTE5NTUyQzEuMjY3MjQ4LS4xMTk1NTIgMS4yNjcyNDgtLjUwMjExNyAxLjI2NzI0OC0uNjY5NDg5QzEuMjY3MjQ4LS43MTczMSAxLjI2NzI0OC0uOTY4MzY5IDEuMzUwOTM0LTEuMzAzMTEzTDMuMDM2NjEzLTcuOTk4MDA3WicvPgo8cGF0aCBpZD0nZzItMTE1JyBkPSdNMi43MjU3NzgtMi4zOTEwMzRDMi45MjkwMTYtMi4zNTUxNjggMy4yNTE4MDYtMi4yODM0MzcgMy4zMjM1MzctMi4yNzE0ODJDMy40Nzg5NTQtMi4yMjM2NjEgNC4wMTY5MzYtMi4wMzIzNzkgNC4wMTY5MzYtMS40NTg1MzFDNC4wMTY5MzYtMS4wODc5MiAzLjY4MjE5Mi0uMTE5NTUyIDIuMjk1MzkyLS4xMTk1NTJDMi4wNDQzMzQtLjExOTU1MiAxLjE0NzY5Ni0uMTU1NDE3IC45MDg1OTMtLjgxMjk1MUMxLjM4NjgtLjc1MzE3NiAxLjYyNTkwMy0xLjEyMzc4NiAxLjYyNTkwMy0xLjM4NjhDMS42MjU5MDMtMS42Mzc4NTggMS40NTg1MzEtMS43NjkzNjUgMS4yMTk0MjctMS43NjkzNjVDLjk1NjQxMy0xLjc2OTM2NSAuNjA5NzE0LTEuNTY2MTI3IC42MDk3MTQtMS4wMjgxNDRDLjYwOTcxNC0uMzIyNzkgMS4zMjcwMjQgLjExOTU1MiAyLjI4MzQzNyAuMTE5NTUyQzQuMTAwNjIzIC4xMTk1NTIgNC42Mzg2MDUtMS4yMTk0MjcgNC42Mzg2MDUtMS44NDEwOTZDNC42Mzg2MDUtMi4wMjA0MjMgNC42Mzg2MDUtMi4zNTUxNjggNC4yNTYwNC0yLjczNzczM0MzLjk1NzE2MS0zLjAyNDY1OCAzLjY3MDIzNy0zLjA4NDQzMyAzLjAyNDY1OC0zLjIxNTk0QzIuNzAxODY4LTMuMjg3NjcxIDIuMTg3Nzk2LTMuMzk1MjY4IDIuMTg3Nzk2LTMuOTMzMjVDMi4xODc3OTYtNC4xNzIzNTQgMi40MDI5ODktNS4wMzMxMjYgMy41Mzg3My01LjAzMzEyNkM0LjA0MDg0Ny01LjAzMzEyNiA0LjUzMTAwOS00Ljg0MTg0MyA0LjY1MDU2LTQuNDExNDU3QzQuMTI0NTMzLTQuNDExNDU3IDQuMTAwNjIzLTMuOTU3MTYxIDQuMTAwNjIzLTMuOTQ1MjA1QzQuMTAwNjIzLTMuNjk0MTQ3IDQuMzI3NzcxLTMuNjIyNDE2IDQuNDM1MzY3LTMuNjIyNDE2QzQuNjAyNzQtMy42MjI0MTYgNC45Mzc0ODQtMy43NTM5MjMgNC45Mzc0ODQtNC4yNTYwNFM0LjQ4MzE4OC01LjI3MjIyOSAzLjU1MDY4NS01LjI3MjIyOUMxLjk4NDU1OC01LjI3MjIyOSAxLjU2NjEyNy00LjA0MDg0NyAxLjU2NjEyNy0zLjU1MDY4NUMxLjU2NjEyNy0yLjY0MjA5MiAyLjQ1MDgwOS0yLjQ1MDgwOSAyLjcyNTc3OC0yLjM5MTAzNFonLz4KPHBhdGggaWQ9J2cyLTExOCcgZD0nTTUuNDYzNTEyLTQuNDcxMjMzQzUuNDYzNTEyLTUuMjI0NDA4IDUuMDgwOTQ2LTUuMjcyMjI5IDQuOTg1MzA1LTUuMjcyMjI5QzQuNjk4MzgxLTUuMjcyMjI5IDQuNDM1MzY3LTQuOTg1MzA1IDQuNDM1MzY3LTQuNzQ2MjAyQzQuNDM1MzY3LTQuNjAyNzQgNC41MTkwNTQtNC41MTkwNTQgNC41NjY4NzQtNC40NzEyMzNDNC42ODY0MjYtNC4zNjM2MzYgNC45OTcyNi00LjA0MDg0NyA0Ljk5NzI2LTMuNDE5MTc4QzQuOTk3MjYtMi45MTcwNjEgNC4yNzk5NS0uMTE5NTUyIDIuODQ1MzMtLjExOTU1MkMyLjExNjA2NS0uMTE5NTUyIDEuOTcyNjAzLS43MjkyNjUgMS45NzI2MDMtMS4xNzE2MDZDMS45NzI2MDMtMS43NjkzNjUgMi4yNDc1NzItMi42MDYyMjcgMi41NzAzNjEtMy40NjY5OTlDMi43NjE2NDQtMy45NTcxNjEgMi44MDk0NjUtNC4wNzY3MTIgMi44MDk0NjUtNC4zMTU4MTZDMi44MDk0NjUtNC44MTc5MzMgMi40NTA4MDktNS4yNzIyMjkgMS44NjUwMDYtNS4yNzIyMjlDLjc2NTEzMS01LjI3MjIyOSAuMzIyNzktMy41Mzg3MyAuMzIyNzktMy40NDMwODhDLjMyMjc5LTMuMzk1MjY4IC4zNzA2MS0zLjMzNTQ5MiAuNDU0Mjk2LTMuMzM1NDkyQy41NjE4OTMtMy4zMzU0OTIgLjU3Mzg0OC0zLjM4MzMxMyAuNjIxNjY5LTMuNTUwNjg1Qy45MDg1OTMtNC41Nzg4MjkgMS4zNzQ4NDQtNS4wMzMxMjYgMS44MjkxNDEtNS4wMzMxMjZDMS45MzY3MzctNS4wMzMxMjYgMi4xMzk5NzUtNS4wMzMxMjYgMi4xMzk5NzUtNC42Mzg2MDVDMi4xMzk5NzUtNC4zMjc3NzEgMi4wMDg0NjgtMy45ODEwNzEgMS44MjkxNDEtMy41MjY3NzVDMS4yNTUyOTMtMS45OTY1MTMgMS4yNTUyOTMtMS42MjU5MDMgMS4yNTUyOTMtMS4zMzg5NzlDMS4yNTUyOTMtMS4wNzU5NjUgMS4yOTExNTgtLjU4NTgwMyAxLjY2MTc2OC0uMjUxMDU5QzIuMDkyMTU0IC4xMTk1NTIgMi42ODk5MTMgLjExOTU1MiAyLjc5NzUwOSAuMTE5NTUyQzQuNzgyMDY3IC4xMTk1NTIgNS40NjM1MTItMy43ODk3ODggNS40NjM1MTItNC40NzEyMzNaJy8+CjxwYXRoIGlkPSdnNC00MCcgZD0nTTMuODg1NDMgMi45MDUxMDZDMy44ODU0MyAyLjg2OTI0IDMuODg1NDMgMi44NDUzMyAzLjY4MjE5MiAyLjY0MjA5MkMyLjQ4NjY3NSAxLjQzNDYyIDEuODE3MTg2LS41Mzc5ODMgMS44MTcxODYtMi45NzY4MzdDMS44MTcxODYtNS4yOTYxMzkgMi4zNzkwNzgtNy4yOTI2NTMgMy43NjU4NzgtOC43MDMzNjJDMy44ODU0My04LjgxMDk1OSAzLjg4NTQzLTguODM0ODY5IDMuODg1NDMtOC44NzA3MzVDMy44ODU0My04Ljk0MjQ2NiAzLjgyNTY1NC04Ljk2NjM3NiAzLjc3NzgzMy04Ljk2NjM3NkMzLjYyMjQxNi04Ljk2NjM3NiAyLjY0MjA5Mi04LjEwNTYwNCAyLjA1NjI4OS02LjkzMzk5OEMxLjQ0NjU3NS01LjcyNjUyNiAxLjE3MTYwNi00LjQ0NzMyMyAxLjE3MTYwNi0yLjk3NjgzN0MxLjE3MTYwNi0xLjkxMjgyNyAxLjMzODk3OS0uNDkwMTYyIDEuOTYwNjQ4IC43ODkwNDFDMi42NjYwMDIgMi4yMjM2NjEgMy42NDYzMjYgMy4wMDA3NDcgMy43Nzc4MzMgMy4wMDA3NDdDMy44MjU2NTQgMy4wMDA3NDcgMy44ODU0MyAyLjk3NjgzNyAzLjg4NTQzIDIuOTA1MTA2WicvPgo8cGF0aCBpZD0nZzQtNDEnIGQ9J00zLjM3MTM1Ny0yLjk3NjgzN0MzLjM3MTM1Ny0zLjg4NTQzIDMuMjUxODA2LTUuMzY3ODcgMi41ODIzMTYtNi43NTQ2N0MxLjg3Njk2MS04LjE4OTI5IC44OTY2MzgtOC45NjYzNzYgLjc2NTEzMS04Ljk2NjM3NkMuNzE3MzEtOC45NjYzNzYgLjY1NzUzNC04Ljk0MjQ2NiAuNjU3NTM0LTguODcwNzM1Qy42NTc1MzQtOC44MzQ4NjkgLjY1NzUzNC04LjgxMDk1OSAuODYwNzcyLTguNjA3NzIxQzIuMDU2Mjg5LTcuNDAwMjQ5IDIuNzI1Nzc4LTUuNDI3NjQ2IDIuNzI1Nzc4LTIuOTg4NzkyQzIuNzI1Nzc4LS42Njk0ODkgMi4xNjM4ODUgMS4zMjcwMjQgLjc3NzA4NiAyLjczNzczM0MuNjU3NTM0IDIuODQ1MzMgLjY1NzUzNCAyLjg2OTI0IC42NTc1MzQgMi45MDUxMDZDLjY1NzUzNCAyLjk3NjgzNyAuNzE3MzEgMy4wMDA3NDcgLjc2NTEzMSAzLjAwMDc0N0MuOTIwNTQ4IDMuMDAwNzQ3IDEuOTAwODcyIDIuMTM5OTc1IDIuNDg2Njc1IC45NjgzNjlDMy4wOTYzODktLjI1MTA1OSAzLjM3MTM1Ny0xLjU0MjIxNyAzLjM3MTM1Ny0yLjk3NjgzN1onLz4KPHBhdGggaWQ9J2c0LTQzJyBkPSdNNC43NzAxMTItMi43NjE2NDRIOC4wNjk3MzhDOC4yMzcxMTEtMi43NjE2NDQgOC40NTIzMDQtMi43NjE2NDQgOC40NTIzMDQtMi45NzY4MzdDOC40NTIzMDQtMy4yMDM5ODUgOC4yNDkwNjYtMy4yMDM5ODUgOC4wNjk3MzgtMy4yMDM5ODVINC43NzAxMTJWLTYuNTAzNjExQzQuNzcwMTEyLTYuNjcwOTg0IDQuNzcwMTEyLTYuODg2MTc3IDQuNTU0OTE5LTYuODg2MTc3QzQuMzI3NzcxLTYuODg2MTc3IDQuMzI3NzcxLTYuNjgyOTM5IDQuMzI3NzcxLTYuNTAzNjExVi0zLjIwMzk4NUgxLjAyODE0NEMuODYwNzcyLTMuMjAzOTg1IC42NDU1NzktMy4yMDM5ODUgLjY0NTU3OS0yLjk4ODc5MkMuNjQ1NTc5LTIuNzYxNjQ0IC44NDg4MTctMi43NjE2NDQgMS4wMjgxNDQtMi43NjE2NDRINC4zMjc3NzFWLjUzNzk4M0M0LjMyNzc3MSAuNzA1MzU1IDQuMzI3NzcxIC45MjA1NDggNC41NDI5NjQgLjkyMDU0OEM0Ljc3MDExMiAuOTIwNTQ4IDQuNzcwMTEyIC43MTczMSA0Ljc3MDExMiAuNTM3OTgzVi0yLjc2MTY0NFonLz4KPHBhdGggaWQ9J2c0LTUwJyBkPSdNNS4yNjAyNzQtMi4wMDg0NjhINC45OTcyNkM0Ljk2MTM5NS0xLjgwNTIzIDQuODY1NzUzLTEuMTQ3Njk2IDQuNzQ2MjAyLS45NTY0MTNDNC42NjI1MTYtLjg0ODgxNyAzLjk4MTA3MS0uODQ4ODE3IDMuNjIyNDE2LS44NDg4MTdIMS40MTA3MUMxLjczMzQ5OS0xLjEyMzc4NiAyLjQ2Mjc2NS0xLjg4ODkxNyAyLjc3MzU5OS0yLjE3NTg0MUM0LjU5MDc4NS0zLjg0OTU2NCA1LjI2MDI3NC00LjQ3MTIzMyA1LjI2MDI3NC01LjY1NDc5NUM1LjI2MDI3NC03LjAyOTYzOSA0LjE3MjM1NC03Ljk1MDE4NyAyLjc4NTU1NC03Ljk1MDE4N1MuNTg1ODAzLTYuNzY2NjI1IC41ODU4MDMtNS43Mzg0ODFDLjU4NTgwMy01LjEyODc2NyAxLjExMTgzMS01LjEyODc2NyAxLjE0NzY5Ni01LjEyODc2N0MxLjM5ODc1NS01LjEyODc2NyAxLjcwOTU4OS01LjMwODA5NSAxLjcwOTU4OS01LjY5MDY2QzEuNzA5NTg5LTYuMDI1NDA1IDEuNDgyNDQxLTYuMjUyNTUzIDEuMTQ3Njk2LTYuMjUyNTUzQzEuMDQwMS02LjI1MjU1MyAxLjAxNjE4OS02LjI1MjU1MyAuOTgwMzI0LTYuMjQwNTk4QzEuMjA3NDcyLTcuMDUzNTQ5IDEuODUzMDUxLTcuNjAzNDg3IDIuNjMwMTM3LTcuNjAzNDg3QzMuNjQ2MzI2LTcuNjAzNDg3IDQuMjY3OTk1LTYuNzU0NjcgNC4yNjc5OTUtNS42NTQ3OTVDNC4yNjc5OTUtNC42Mzg2MDUgMy42ODIxOTItMy43NTM5MjMgMy4wMDA3NDctMi45ODg3OTJMLjU4NTgwMy0uMjg2OTI0VjBINC45NDk0NEw1LjI2MDI3NC0yLjAwODQ2OFonLz4KPHBhdGggaWQ9J2c0LTkxJyBkPSdNMi45ODg3OTIgMi45ODg3OTJWMi41NDY0NTFIMS44MjkxNDFWLTguNTI0MDM1SDIuOTg4NzkyVi04Ljk2NjM3NkgxLjM4NjhWMi45ODg3OTJIMi45ODg3OTJaJy8+CjxwYXRoIGlkPSdnNC05MycgZD0nTTEuODUzMDUxLTguOTY2Mzc2SC4yNTEwNTlWLTguNTI0MDM1SDEuNDEwNzFWMi41NDY0NTFILjI1MTA1OVYyLjk4ODc5MkgxLjg1MzA1MVYtOC45NjYzNzZaJy8+CjxwYXRoIGlkPSdnMy00OScgZD0nTTIuNTAyNjE1LTUuMDc2OTYxQzIuNTAyNjE1LTUuMjkyMTU0IDIuNDg2Njc1LTUuMzAwMTI1IDIuMjcxNDgyLTUuMzAwMTI1QzEuOTQ0NzA3LTQuOTgxMzIgMS41MjIyOTEtNC43OTAwMzcgLjc2NTEzMS00Ljc5MDAzN1YtNC41MjcwMjRDLjk4MDMyNC00LjUyNzAyNCAxLjQxMDcxLTQuNTI3MDI0IDEuODcyOTc2LTQuNzQyMjE3Vi0uNjUzNTQ5QzEuODcyOTc2LS4zNTg2NTUgMS44NDkwNjYtLjI2MzAxNCAxLjA5MTkwNS0uMjYzMDE0SC44MTI5NTFWMEMxLjEzOTcyNi0uMDIzOTEgMS44MjUxNTYtLjAyMzkxIDIuMTgzODExLS4wMjM5MVMzLjIzNTg2Ni0uMDIzOTEgMy41NjI2NCAwVi0uMjYzMDE0SDMuMjgzNjg2QzIuNTI2NTI2LS4yNjMwMTQgMi41MDI2MTUtLjM1ODY1NSAyLjUwMjYxNS0uNjUzNTQ5Vi01LjA3Njk2MVonLz4KPHBhdGggaWQ9J2czLTYxJyBkPSdNNS44MjYxNTItMi42NTQwNDdDNS45NDU3MDQtMi42NTQwNDcgNi4xMDUxMDYtMi42NTQwNDcgNi4xMDUxMDYtMi44MzczNlM1LjkxMzgyMy0zLjAyMDY3MiA1Ljc5NDI3MS0zLjAyMDY3MkguNzgxMDcxQy42NjE1MTktMy4wMjA2NzIgLjQ3MDIzNy0zLjAyMDY3MiAuNDcwMjM3LTIuODM3MzZTLjYyOTYzOS0yLjY1NDA0NyAuNzQ5MTkxLTIuNjU0MDQ3SDUuODI2MTUyWk01Ljc5NDI3MS0uOTY0Mzg0QzUuOTEzODIzLS45NjQzODQgNi4xMDUxMDYtLjk2NDM4NCA2LjEwNTEwNi0xLjE0NzY5NlM1Ljk0NTcwNC0xLjMzMTAwOSA1LjgyNjE1Mi0xLjMzMTAwOUguNzQ5MTkxQy42Mjk2MzktMS4zMzEwMDkgLjQ3MDIzNy0xLjMzMTAwOSAuNDcwMjM3LTEuMTQ3Njk2Uy42NjE1MTktLjk2NDM4NCAuNzgxMDcxLS45NjQzODRINS43OTQyNzFaJy8+CjxwYXRoIGlkPSdnMS0xMDUnIGQ9J00yLjM3NTA5My00Ljk3MzM1QzIuMzc1MDkzLTUuMTQ4NjkyIDIuMjQ3NTcyLTUuMjc2MjE0IDIuMDY0MjU5LTUuMjc2MjE0QzEuODU3MDM2LTUuMjc2MjE0IDEuNjI1OTAzLTUuMDg0OTMyIDEuNjI1OTAzLTQuODQ1ODI4QzEuNjI1OTAzLTQuNjcwNDg2IDEuNzUzNDI1LTQuNTQyOTY0IDEuOTM2NzM3LTQuNTQyOTY0QzIuMTQzOTYtNC41NDI5NjQgMi4zNzUwOTMtNC43MzQyNDcgMi4zNzUwOTMtNC45NzMzNVpNMS4yMTE0NTctMi4wNDgzMTlMLjc4MTA3MS0uOTQ4NDQzQy43NDEyMi0uODI4ODkyIC43MDEzNy0uNzMzMjUgLjcwMTM3LS41OTc3NThDLjcwMTM3LS4yMDcyMjMgMS4wMDQyMzQgLjA3OTcwMSAxLjQyNjY1IC4wNzk3MDFDMi4xOTk3NTEgLjA3OTcwMSAyLjUyNjUyNi0xLjAzNjExNSAyLjUyNjUyNi0xLjEzOTcyNkMyLjUyNjUyNi0xLjIxOTQyNyAyLjQ2Mjc2NS0xLjI0MzMzNyAyLjQwNjk3NC0xLjI0MzMzN0MyLjMxMTMzMy0xLjI0MzMzNyAyLjI5NTM5Mi0xLjE4NzU0NyAyLjI3MTQ4Mi0xLjEwNzg0NkMyLjA4ODE2OS0uNDcwMjM3IDEuNzYxMzk1LS4xNDM0NjIgMS40NDI1OS0uMTQzNDYyQzEuMzQ2OTQ5LS4xNDM0NjIgMS4yNTEzMDgtLjE4MzMxMyAxLjI1MTMwOC0uMzk4NTA2QzEuMjUxMzA4LS41ODk3ODggMS4zMDcwOTgtLjczMzI1IDEuNDEwNzEtLjk4MDMyNEMxLjQ5MDQxMS0xLjE5NTUxNyAxLjU3MDExMi0xLjQxMDcxIDEuNjU3NzgzLTEuNjI1OTAzTDEuOTA0ODU3LTIuMjcxNDgyQzEuOTc2NTg4LTIuNDU0Nzk1IDIuMDcyMjI5LTIuNzAxODY4IDIuMDcyMjI5LTIuODM3MzZDMi4wNzIyMjktMy4yMzU4NjYgMS43NTM0MjUtMy41MTQ4MTkgMS4zNDY5NDktMy41MTQ4MTlDLjU3Mzg0OC0zLjUxNDgxOSAuMjM5MTAzLTIuMzk5MDA0IC4yMzkxMDMtMi4yOTUzOTJDLjIzOTEwMy0yLjIyMzY2MSAuMjk0ODk0LTIuMTkxNzgxIC4zNTg2NTUtMi4xOTE3ODFDLjQ2MjI2Ny0yLjE5MTc4MSAuNDcwMjM3LTIuMjM5NjAxIC40OTQxNDctMi4zMTkzMDNDLjcxNzMxLTMuMDc2NDYzIDEuMDgzOTM1LTMuMjkxNjU2IDEuMzIzMDM5LTMuMjkxNjU2QzEuNDM0NjItMy4yOTE2NTYgMS41MTQzMjEtMy4yNTE4MDYgMS41MTQzMjEtMy4wMjg2NDNDMS41MTQzMjEtMi45NDg5NDEgMS41MDYzNTEtMi44MzczNiAxLjQyNjY1LTIuNTk4MjU3TDEuMjExNDU3LTIuMDQ4MzE5WicvPgo8cGF0aCBpZD0nZzEtMTEwJyBkPSdNMS41OTQwMjItMS4zMDcwOThDMS42MTc5MzMtMS40MjY2NSAxLjY5NzYzNC0xLjcyOTUxNCAxLjcyMTU0NC0xLjg0OTA2NkMxLjgzMzEyNi0yLjI3OTQ1MiAxLjgzMzEyNi0yLjI4NzQyMiAyLjAxNjQzOC0yLjU1MDQzNkMyLjI3OTQ1Mi0yLjk0MDk3MSAyLjY1NDA0Ny0zLjI5MTY1NiAzLjE4ODA0NS0zLjI5MTY1NkMzLjQ3NDk2OS0zLjI5MTY1NiAzLjY0MjM0MS0zLjEyNDI4NCAzLjY0MjM0MS0yLjc0OTY4OUMzLjY0MjM0MS0yLjMxMTMzMyAzLjMwNzU5Ny0xLjQwMjc0IDMuMTU2MTY0LTEuMDEyMjA0QzMuMDUyNTUzLS43NDkxOTEgMy4wNTI1NTMtLjcwMTM3IDMuMDUyNTUzLS41OTc3NThDMy4wNTI1NTMtLjE0MzQ2MiAzLjQyNzE0OCAuMDc5NzAxIDMuNzY5ODYzIC4wNzk3MDFDNC41NTA5MzQgLjA3OTcwMSA0Ljg3NzcwOS0xLjAzNjExNSA0Ljg3NzcwOS0xLjEzOTcyNkM0Ljg3NzcwOS0xLjIxOTQyNyA0LjgxMzk0OC0xLjI0MzMzNyA0Ljc1ODE1Ny0xLjI0MzMzN0M0LjY2MjUxNi0xLjI0MzMzNyA0LjY0NjU3NS0xLjE4NzU0NyA0LjYyMjY2NS0xLjEwNzg0NkM0LjQzMTM4Mi0uNDU0Mjk2IDQuMDk2NjM4LS4xNDM0NjIgMy43OTM3NzMtLjE0MzQ2MkMzLjY2NjI1Mi0uMTQzNDYyIDMuNjAyNDkxLS4yMjMxNjMgMy42MDI0OTEtLjQwNjQ3NlMzLjY2NjI1Mi0uNzY1MTMxIDMuNzQ1OTUzLS45NjQzODRDMy44NjU1MDQtMS4yNjcyNDggNC4yMTYxODktMi4xODM4MTEgNC4yMTYxODktMi42MzAxMzdDNC4yMTYxODktMy4yMjc4OTUgMy44MDE3NDMtMy41MTQ4MTkgMy4yMjc4OTUtMy41MTQ4MTlDMi41ODIzMTYtMy41MTQ4MTkgMi4xNjc4Ny0zLjEyNDI4NCAxLjkzNjczNy0yLjgyMTQyQzEuODgwOTQ2LTMuMjU5Nzc2IDEuNTMwMjYyLTMuNTE0ODE5IDEuMTIzNzg2LTMuNTE0ODE5Qy44MzY4NjItMy41MTQ4MTkgLjYzNzYwOS0zLjMzMTUwNyAuNTEwMDg3LTMuMDg0NDMzQy4zMTg4MDQtMi43MDk4MzggLjIzOTEwMy0yLjMxMTMzMyAuMjM5MTAzLTIuMjk1MzkyQy4yMzkxMDMtMi4yMjM2NjEgLjI5NDg5NC0yLjE5MTc4MSAuMzU4NjU1LTIuMTkxNzgxQy40NjIyNjctMi4xOTE3ODEgLjQ3MDIzNy0yLjIyMzY2MSAuNTI2MDI3LTIuNDMwODg0Qy42MjE2NjktMi44MjE0MiAuNzY1MTMxLTMuMjkxNjU2IDEuMDk5ODc1LTMuMjkxNjU2QzEuMzA3MDk4LTMuMjkxNjU2IDEuMzU0OTE5LTMuMDkyNDAzIDEuMzU0OTE5LTIuOTE3MDYxQzEuMzU0OTE5LTIuNzczNTk5IDEuMzE1MDY4LTIuNjIyMTY3IDEuMjUxMzA4LTIuMzU5MTUzQzEuMjM1MzY3LTIuMjk1MzkyIDEuMTE1ODE2LTEuODI1MTU2IDEuMDgzOTM1LTEuNzEzNTc0TC43ODkwNDEtLjUxODA1N0MuNzU3MTYxLS4zOTg1MDYgLjcwOTM0LS4xOTkyNTMgLjcwOTM0LS4xNjczNzJDLjcwOTM0IC4wMTU5NCAuODYwNzcyIC4wNzk3MDEgLjk2NDM4NCAuMDc5NzAxQzEuMTA3ODQ2IC4wNzk3MDEgMS4yMjczOTctLjAxNTk0IDEuMjgzMTg4LS4xMTE1ODJDMS4zMDcwOTgtLjE1OTQwMiAxLjM3MDg1OS0uNDMwMzg2IDEuNDEwNzEtLjU5Nzc1OEwxLjU5NDAyMi0xLjMwNzA5OFonLz4KPHBhdGggaWQ9J2cwLTgxJyBkPSdNNC4yOTE5MDUgMTEuOTU1MTY4VjExLjQ3Njk2MUMzLjA2MDUyMyAxMS40NzY5NjEgMy4wNjA1MjMgMTAuODkxMTU4IDMuMDYwNTIzIDEwLjUzMjUwM1YuNDc4MjA3SDguMjEzMlYxMC41MzI1MDNDOC4yMTMyIDEwLjg5MTE1OCA4LjIxMzIgMTEuNDc2OTYxIDYuOTgxODE4IDExLjQ3Njk2MVYxMS45NTUxNjhIMTAuNjA0MjM0VjExLjQ3Njk2MUM5LjM3Mjg1MiAxMS40NzY5NjEgOS4zNzI4NTIgMTAuODkxMTU4IDkuMzcyODUyIDEwLjUzMjUwM1YxLjQyMjY2NUM5LjM3Mjg1MiAxLjA2NDAxIDkuMzcyODUyIC40NzgyMDcgMTAuNjA0MjM0IC40NzgyMDdWMEguNjY5NDg5Vi40NzgyMDdDMS45MDA4NzIgLjQ3ODIwNyAxLjkwMDg3MiAxLjA2NDAxIDEuOTAwODcyIDEuNDIyNjY1VjEwLjUzMjUwM0MxLjkwMDg3MiAxMC44OTExNTggMS45MDA4NzIgMTEuNDc2OTYxIC42Njk0ODkgMTEuNDc2OTYxVjExLjk1NTE2OEg0LjI5MTkwNVonLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzAnIHk9Jy04Ljk2NjQ1MicgeGxpbms6aHJlZj0nI2cwLTgxJy8+Cjx1c2UgeD0nMTEuMjkxMDE3JyB5PSctNS44MTE2MTEnIHhsaW5rOmhyZWY9JyNnMS0xMTAnLz4KPHVzZSB4PScxMS4yOTEwMTcnIHk9JzMuNDg3JyB4bGluazpocmVmPScjZzEtMTA1Jy8+Cjx1c2UgeD0nMTQuMTc0MTU3JyB5PSczLjQ4NycgeGxpbms6aHJlZj0nI2czLTYxJy8+Cjx1c2UgeD0nMjAuNzYwNjY0JyB5PSczLjQ4NycgeGxpbms6aHJlZj0nI2czLTQ5Jy8+Cjx1c2UgeD0nMjUuNDkyOTc5JyB5PScwJyB4bGluazpocmVmPScjZzQtNDAnLz4KPHVzZSB4PSczMC4wNDUzMDQnIHk9JzAnIHhsaW5rOmhyZWY9JyNnNC01MCcvPgo8dXNlIHg9JzM4LjU1NDk1OCcgeT0nMCcgeGxpbms6aHJlZj0nI2c0LTQzJy8+Cjx1c2UgeD0nNTAuMzE2MjczJyB5PScwJyB4bGluazpocmVmPScjZzItMTA4Jy8+Cjx1c2UgeD0nNTQuMDY2MDgyJyB5PScwJyB4bGluazpocmVmPScjZzItMTAxJy8+Cjx1c2UgeD0nNTkuNDkxNTIyJyB5PScwJyB4bGluazpocmVmPScjZzItMTE4Jy8+Cjx1c2UgeD0nNjUuNTc5NzQnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMi0xMDEnLz4KPHVzZSB4PSc3MS4wMDUxODEnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMi0xMDgnLz4KPHVzZSB4PSc3NC43NTQ5ODknIHk9JzAnIHhsaW5rOmhyZWY9JyNnMi0xMTUnLz4KPHVzZSB4PSc4MC4yNjg5OTUnIHk9JzAnIHhsaW5rOmhyZWY9JyNnNC05MScvPgo8dXNlIHg9JzgzLjUyMDY1NicgeT0nMCcgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9Jzg3LjUxNDA4OCcgeT0nMCcgeGxpbms6aHJlZj0nI2c0LTkzJy8+Cjx1c2UgeD0nOTAuNzY1NzUnIHk9JzAnIHhsaW5rOmhyZWY9JyNnNC00MScvPgo8L2c+Cjwvc3ZnPgo8IS0tIERFUFRIPTUgLS0+) .
.Examples
>>> import openturns as ot >>> # direction 1 will be discretized in with 4 intermediate points >>> # and direction 2 with 2 intermediate points >>> levels = [4, 2] >>> # first component in [5,7], second in [6,9] >>> bounds = ot.Interval([5.0, 6.0], [7.0, 9.0]) >>> myGrid = ot.Box(levels, bounds) >>> mySample = myGrid.generate()
Methods
generate()Generate points according to the type of the experiment.
Get the center of the stratified experiment.
Accessor to the object's name.
getId()Accessor to the object's id.
Get the levels of the stratified experiment.
getName()Accessor to the object's name.
Accessor to the object's shadowed id.
Accessor to the object's visibility state.
hasName()Test if the object is named.
Test if the object has a distinguishable name.
setCenter(center)Set the center of the stratified experiment.
setLevels(levels)Set the levels of the stratified experiment.
setName(name)Accessor to the object's name.
setShadowedId(id)Accessor to the object's shadowed id.
setVisibility(visible)Accessor to the object's visibility state.
- __init__(*args)¶
- generate()¶
Generate points according to the type of the experiment.
- Returns:
- sample
Sample The points which constitute the design of experiments. The sampling method is defined by the nature of the experiment.
- sample
Examples
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> myExperiment = ot.Experiment(ot.MonteCarloExperiment(ot.Normal(2),5)) >>> print(myExperiment.generate()) [ X0 X1 ] 0 : [ 0.608202 -1.26617 ] 1 : [ -0.438266 1.20548 ] 2 : [ -2.18139 0.350042 ] 3 : [ -0.355007 1.43725 ] 4 : [ 0.810668 0.793156 ]
- getCenter()¶
Get the center of the stratified experiment.
- Returns:
- center
Point Sequence which has different meanings according to the nature of the stratified experiment: Axial, Composite, Factorial or Box (see corresponding documentation).
- center
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getId()¶
Accessor to the object’s id.
- Returns:
- idint
Internal unique identifier.
- getLevels()¶
Get the levels of the stratified experiment.
- Returns:
- levels
Point Sequence which has different meanings according to the nature of the stratified experiment: Axial, Composite, Factorial or Box (see corresponding documentation).
- levels
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- getShadowedId()¶
Accessor to the object’s shadowed id.
- Returns:
- idint
Internal unique identifier.
- getVisibility()¶
Accessor to the object’s visibility state.
- Returns:
- visiblebool
Visibility flag.
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- hasVisibleName()¶
Test if the object has a distinguishable name.
- Returns:
- hasVisibleNamebool
True if the name is not empty and not the default one.
- setCenter(center)¶
Set the center of the stratified experiment.
- Parameters:
- centersequence of float
Sequence which has different meanings according to the nature of the stratified experiment: Axial, Composite, Factorial or Box (see corresponding documentation).
- setLevels(levels)¶
Set the levels of the stratified experiment.
- Parameters:
- levelssequence of float
Sequence which has different meanings according to the nature of the stratified experiment: Axial, Composite, Factorial or Box (see corresponding documentation).
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
- setShadowedId(id)¶
Accessor to the object’s shadowed id.
- Parameters:
- idint
Internal unique identifier.
- setVisibility(visible)¶
Accessor to the object’s visibility state.
- Parameters:
- visiblebool
Visibility flag.
Examples using the class¶
Use the FORM algorithm in case of several design points
An illustrated example of a FORM probability estimate
Using the FORM - SORM algorithms on a nonlinear function
Example of sensitivity analyses on the wing weight model
{kind=link}