QRMethod¶
- class QRMethod(*args)¶
Least squares solver using the QR decomposition.
- Available constructors:
QRMethod(proxy, weight, indices)
QRMethod(proxy, indices)
QRMethod(design)
- Parameters:
- proxy
DesignProxy Input sample
- weightsequence of float
Output weights
- indicessequence of int
Indices allowed in the basis
- design2-d sequence of float
A priori known design matrix
- proxy
Methods
computeWeightedDesign([whole])Build the design matrix.
getBasis()Accessor to the basis.
Accessor to the object's name.
Current indices accessor.
Get the inverse Gram matrix of input sample.
Get the diagonal of the inverse Gram matrix.
Get the trace of the inverse Gram matrix.
getH()Get the projection matrix H.
getHDiag()Get the diagonal of the projection matrix H.
Initial indices accessor.
Input sample accessor.
getName()Accessor to the object's name.
Accessor to the weights.
hasName()Test if the object is named.
setName(name)Accessor to the object's name.
solve(rhs)Solve the least-squares problem.
solveNormal(rhs)Solve the least-squares problem using normal equation.
Drop the current decomposition.
update(addedIndices, conservedIndices, ...)Update the current decomposition.
See also
Examples
Solves a linear least squares problem with SVD method:
>>> import openturns as ot >>> A = ot.Matrix([[1, 1], [1, 2], [1, 3], [1, 4]]) >>> y = [6, 5, 7, 10] >>> method = ot.QRMethod(A) >>> x = method.solve(y) >>> print(x) [3.5,1.4]
- __init__(*args)¶
- computeWeightedDesign(whole=False)¶
Build the design matrix.
- Parameters:
- wholebool, defaults to False
Whether to use the initial indices instead of the current indices
- Returns:
- psiAk
Matrix The design matrix
- psiAk
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getCurrentIndices()¶
Current indices accessor.
- Returns:
- indices
Indices Indices of the current decomposition in the global basis.
- indices
- getGramInverse()¶
Get the inverse Gram matrix of input sample.

- Returns:
- c
CovarianceMatrix The inverse Gram matrix.
- c
- getGramInverseDiag()¶
Get the diagonal of the inverse Gram matrix.

- Returns:
- d
Point The diagonal of the inverse Gram matrix.
- d
- getGramInverseTrace()¶
Get the trace of the inverse Gram matrix.

- Returns:
- xfloat
The trace of inverse Gram matrix.
- getH()¶
Get the projection matrix H.

- Returns:
- h
SymmetricMatrix The projection matrix H.
- h
- getInitialIndices()¶
Initial indices accessor.
- Returns:
- indices
Indices Initial indices of the terms in the global basis.
- indices
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
- solve(rhs)¶
Solve the least-squares problem.

- Parameters:
- bsequence of float
Second term of the equation
- Returns:
- a
Point The solution.
- a
- solveNormal(rhs)¶
Solve the least-squares problem using normal equation.

- Parameters:
- bsequence of float
Second term of the equation
- Returns:
- x
Point The solution.
- x
- trashDecomposition()¶
Drop the current decomposition.
- update(addedIndices, conservedIndices, removedIndices, row=False)¶
Update the current decomposition.
- Parameters:
- addedIndicessequence of int
Indices of added basis terms.
- conservedIndicessequence of int
Indices of conserved basis terms.
- removedIndicessequence of int
Indices of removed basis terms.
Examples using the class¶
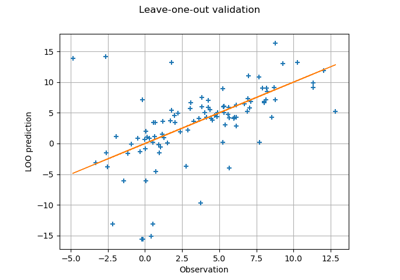
Compute leave-one-out error of a polynomial chaos expansion
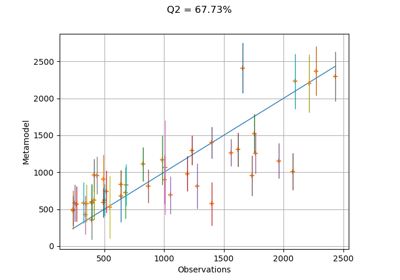
Compute confidence intervals of a regression model from data
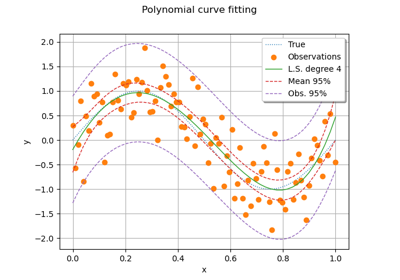
Compute confidence intervals of a univariate noisy function