Note
Go to the end to download the full example code.
Convex decomposition¶
import openturns as ot
import openturns.viewer as otv
import otmeshing
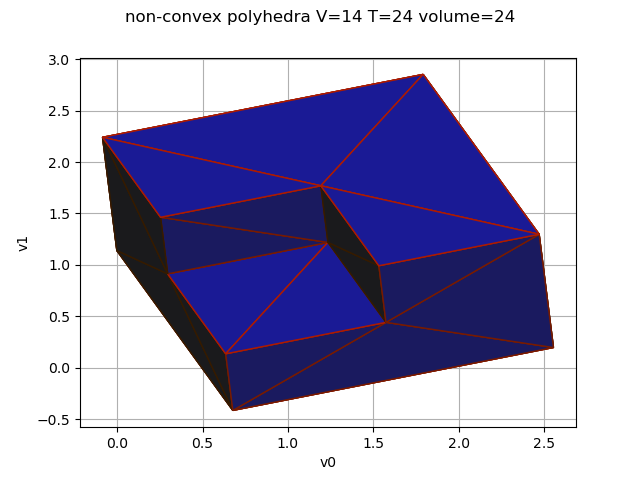
Define a non-convex polyhedra surface mesh: a cube with folded corner
vertices = [
[0, 0, 0], [2, 0, 0], [2, 2, 0], [0, 2, 0], # 0–3 bottom
[0, 0, 2], [2, 0, 2], [0, 2, 2], # 4–7 top
[1, 1, 1], [2, 1, 1], [2, 2, 1], [1, 2, 1], # notch bottom
[1, 1, 2], [2, 1, 2], [1, 2, 2]] # notch top
simplices = [
[0, 1, 5, 5], [0, 5, 4, 4], # y=0
[0, 4, 6, 6], [0, 6, 3, 3], # x=0
[0, 2, 1, 1], [0, 3, 2, 2], # z=0
[10, 9, 2, 2], [10, 2, 3, 3], [10, 3, 6, 6], [10, 6, 13, 13], # y=2 wall
[8, 2, 9, 9], [8, 1, 2, 2], [8, 5, 1, 1], [8, 12, 5, 5], # x=2 wall
[11, 13, 6, 6], [11, 6, 4, 4], [11, 4, 5, 5], [11, 5, 12, 12], # z=2 wall
[8, 7, 12, 12], [7, 11, 12, 12], # y=1 notch
[7, 10, 13, 13], [7, 13, 11, 11], # x=1 notch
[7, 8, 9, 9], [7, 9, 10, 10]] # z=1 notch
polyhedra = ot.Mesh(vertices, simplices)
We can check the mesh is not convex
otmeshing.ConvexDecompositionMesher.IsConvex(polyhedra)
False
Draw the polyhedra
shading = True
thetaX, thetaY, thetaZ = 6.1, 3.7, 4.3
drawEdge = True
graph = polyhedra.draw3D(drawEdge, thetaX, thetaY, thetaZ, shading)
V = polyhedra.getVerticesNumber()
T = polyhedra.getSimplicesNumber()
volume = round(polyhedra.getVolume())
graph.setTitle(f"non-convex polyhedra V={V} T={T} volume={volume}")
view = otv.View(graph)
Build the decomposition
mesher = otmeshing.ConvexDecompositionMesher()
decomposition = mesher.build(polyhedra)
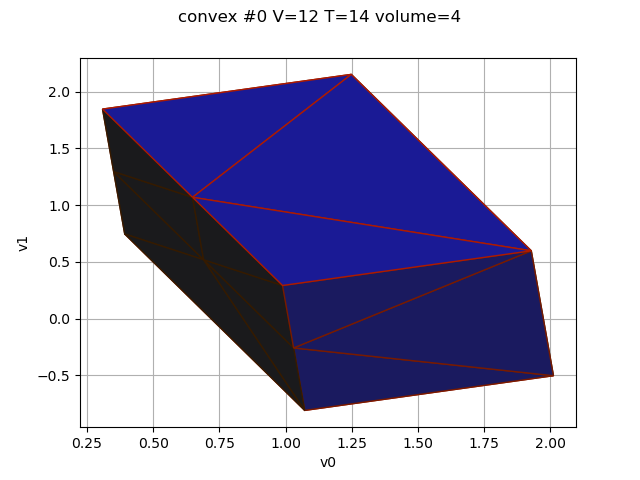
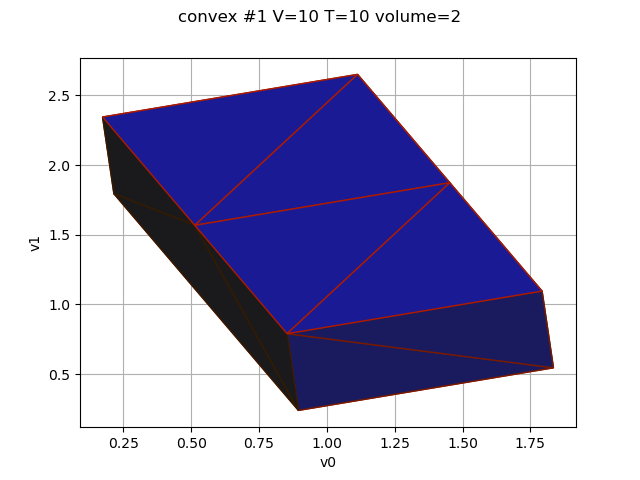
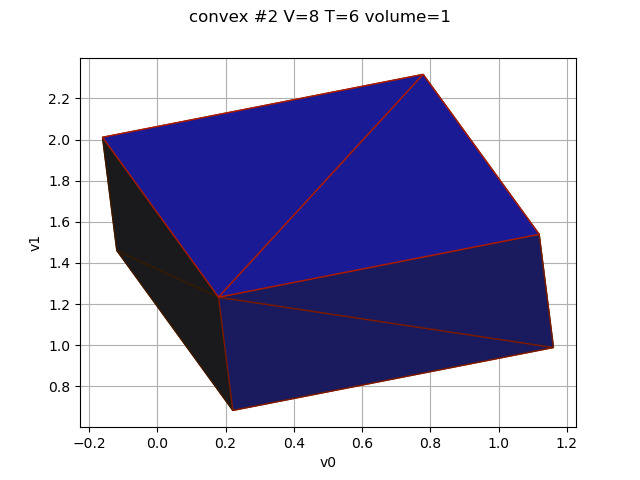
for i, convex in enumerate(decomposition):
V = convex.getVerticesNumber()
T = convex.getSimplicesNumber()
volume = round(convex.getVolume())
graph = convex.draw3D(drawEdge, thetaX, thetaY, thetaZ, shading)
graph.setTitle(f"convex #{i} V={V} T={T} volume={volume}")
view = otv.View(graph)