A two degree-of-fredom primary/secondary damped oscillator¶
We consider a two degree-of-fredom primary-secondary damped oscillator. This system is composed of a two-stage oscillator characterized by a mass, a stiffness and a damping ratio for each of the two oscillators. This system is submitted to a white-noise excitation. The limit-state function is highly nonlinear, mainly due to the interactions between the two stages of the system, and presents one failure zone.
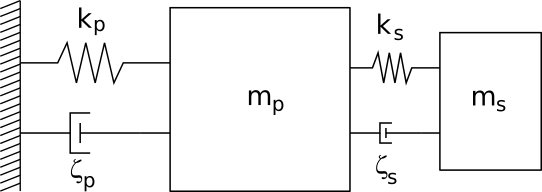
Two stage oscillator¶
The limit state function is defined as follows:
![G = F_s - 3 k_s \sqrt{\frac{\pi S_0}{4 \zeta_s \omega_s^3} \left[\frac{\zeta_a \zeta_s}{\zeta_p \zeta_s (4 \zeta_a^2 + \theta^2)+\gamma \zeta_a^2}\frac{(\zeta_p \omega_p^3 + \zeta_s \omega_s^3)\omega_p}{4 \zeta_a \omega_a^4}\right]}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMyAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPSczMTEuMzA4MjI2cHQnIGhlaWdodD0nMzUuODY1ODY5cHQnIHZpZXdCb3g9JzM4LjYxNzM3NyAtMzUuODY1ODYyIDMxMS4zMDgyMjYgMzUuODY1ODY5Jz4KPGRlZnM+CjxwYXRoIGlkPSdnNC00OCcgZD0nTTMuODk3Mzg1LTIuNTQyNDY2QzMuODk3Mzg1LTMuMzk1MjY4IDMuODA5NzE0LTMuOTEzMzI1IDMuNTQ2Ny00LjQyMzQxMkMzLjE5NjAxNS01LjEyNDc4MiAyLjU1MDQzNi01LjMwMDEyNSAyLjExMjA4LTUuMzAwMTI1QzEuMTA3ODQ2LTUuMzAwMTI1IC43NDEyMi00LjU1MDkzNCAuNjI5NjM5LTQuMzI3NzcxQy4zNDI3MTUtMy43NDU5NTMgLjMyNjc3NS0yLjk1NjkxMiAuMzI2Nzc1LTIuNTQyNDY2Qy4zMjY3NzUtMi4wMTY0MzggLjM1MDY4NS0xLjIxMTQ1NyAuNzMzMjUtLjU3Mzg0OEMxLjA5OTg3NSAuMDE1OTQgMS42ODk2NjQgLjE2NzM3MiAyLjExMjA4IC4xNjczNzJDMi40OTQ2NDUgLjE2NzM3MiAzLjE4MDA3NSAuMDQ3ODIxIDMuNTc4NTgtLjc0MTIyQzMuODczNDc0LTEuMzE1MDY4IDMuODk3Mzg1LTIuMDI0NDA4IDMuODk3Mzg1LTIuNTQyNDY2Wk0yLjExMjA4LS4wNTU3OTFDMS44NDEwOTYtLjA1NTc5MSAxLjI5MTE1OC0uMTgzMzEzIDEuMTIzNzg2LTEuMDIwMTc0QzEuMDM2MTE1LTEuNDc0NDcxIDEuMDM2MTE1LTIuMjIzNjYxIDEuMDM2MTE1LTIuNjM4MTA3QzEuMDM2MTE1LTMuMTg4MDQ1IDEuMDM2MTE1LTMuNzQ1OTUzIDEuMTIzNzg2LTQuMTg0MzA5QzEuMjkxMTU4LTQuOTk3MjYgMS45MTI4MjctNS4wNzY5NjEgMi4xMTIwOC01LjA3Njk2MUMyLjM4MzA2NC01LjA3Njk2MSAyLjkzMzAwMS00Ljk0MTQ2OSAzLjA5MjQwMy00LjIxNjE4OUMzLjE4ODA0NS0zLjc3NzgzMyAzLjE4ODA0NS0zLjE4MDA3NSAzLjE4ODA0NS0yLjYzODEwN0MzLjE4ODA0NS0yLjE2Nzg3IDMuMTg4MDQ1LTEuNDUwNTYgMy4wOTI0MDMtMS4wMDQyMzRDMi45MjUwMzEtLjE2NzM3MiAyLjM3NTA5My0uMDU1NzkxIDIuMTEyMDgtLjA1NTc5MVonLz4KPHBhdGggaWQ9J2c0LTUwJyBkPSdNMi4yNDc1NzItMS42MjU5MDNDMi4zNzUwOTMtMS43NDU0NTUgMi43MDk4MzgtMi4wMDg0NjggMi44MzczNi0yLjEyMDA1QzMuMzMxNTA3LTIuNTc0MzQ2IDMuODAxNzQzLTMuMDEyNzAyIDMuODAxNzQzLTMuNzM3OTgzQzMuODAxNzQzLTQuNjg2NDI2IDMuMDA0NzMyLTUuMzAwMTI1IDIuMDA4NDY4LTUuMzAwMTI1QzEuMDUyMDU1LTUuMzAwMTI1IC40MjI0MTYtNC41NzQ4NDQgLjQyMjQxNi0zLjg2NTUwNEMuNDIyNDE2LTMuNDc0OTY5IC43MzMyNS0zLjQxOTE3OCAuODQ0ODMyLTMuNDE5MTc4QzEuMDEyMjA0LTMuNDE5MTc4IDEuMjU5Mjc4LTMuNTM4NzMgMS4yNTkyNzgtMy44NDE1OTRDMS4yNTkyNzgtNC4yNTYwNCAuODYwNzcyLTQuMjU2MDQgLjc2NTEzMS00LjI1NjA0Qy45OTYyNjQtNC44Mzc4NTggMS41MzAyNjItNS4wMzcxMTEgMS45MjA3OTctNS4wMzcxMTFDMi42NjIwMTctNS4wMzcxMTEgMy4wNDQ1ODMtNC40MDc0NzIgMy4wNDQ1ODMtMy43Mzc5ODNDMy4wNDQ1ODMtMi45MDkwOTEgMi40NjI3NjUtMi4zMDMzNjIgMS41MjIyOTEtMS4zMzg5NzlMLjUxODA1Ny0uMzAyODY0Qy40MjI0MTYtLjIxNTE5MyAuNDIyNDE2LS4xOTkyNTMgLjQyMjQxNiAwSDMuNTcwNjFMMy44MDE3NDMtMS40MjY2NUgzLjU1NDY3QzMuNTMwNzYtMS4yNjcyNDggMy40NjY5OTktLjg2ODc0MiAzLjM3MTM1Ny0uNzE3MzFDMy4zMjM1MzctLjY1MzU0OSAyLjcxNzgwOC0uNjUzNTQ5IDIuNTkwMjg2LS42NTM1NDlIMS4xNzE2MDZMMi4yNDc1NzItMS42MjU5MDNaJy8+CjxwYXRoIGlkPSdnNC01MScgZD0nTTIuMDE2NDM4LTIuNjYyMDE3QzIuNjQ2MDc3LTIuNjYyMDE3IDMuMDQ0NTgzLTIuMTk5NzUxIDMuMDQ0NTgzLTEuMzYyODg5QzMuMDQ0NTgzLS4zNjY2MjUgMi40Nzg3MDUtLjA3MTczMSAyLjA1NjI4OS0uMDcxNzMxQzEuNjE3OTMzLS4wNzE3MzEgMS4wMjAxNzQtLjIzMTEzMyAuNzQxMjItLjY1MzU0OUMxLjAyODE0NC0uNjUzNTQ5IDEuMjI3Mzk3LS44MzY4NjIgMS4yMjczOTctMS4wOTk4NzVDMS4yMjczOTctMS4zNTQ5MTkgMS4wNDQwODUtMS41MzgyMzIgLjc4OTA0MS0xLjUzODIzMkMuNTczODQ4LTEuNTM4MjMyIC4zNTA2ODUtMS40MDI3NCAuMzUwNjg1LTEuMDgzOTM1Qy4zNTA2ODUtLjMyNjc3NSAxLjE2MzYzNiAuMTY3MzcyIDIuMDcyMjI5IC4xNjczNzJDMy4xMzIyNTQgLjE2NzM3MiAzLjg3MzQ3NC0uNTY1ODc4IDMuODczNDc0LTEuMzYyODg5QzMuODczNDc0LTIuMDI0NDA4IDMuMzQ3NDQ3LTIuNjMwMTM3IDIuNTM0NDk2LTIuODA1NDc5QzMuMTY0MTM0LTMuMDI4NjQzIDMuNjM0MzcxLTMuNTcwNjEgMy42MzQzNzEtNC4yMDgyMTlTMi45MTcwNjEtNS4zMDAxMjUgMi4wODgxNjktNS4zMDAxMjVDMS4yMzUzNjctNS4zMDAxMjUgLjU4OTc4OC00LjgzNzg1OCAuNTg5Nzg4LTQuMjMyMTNDLjU4OTc4OC0zLjkzNzIzNSAuNzg5MDQxLTMuODA5NzE0IC45OTYyNjQtMy44MDk3MTRDMS4yNDMzMzctMy44MDk3MTQgMS40MDI3NC0zLjk4NTA1NiAxLjQwMjc0LTQuMjE2MTg5QzEuNDAyNzQtNC41MTEwODMgMS4xNDc2OTYtNC42MjI2NjUgLjk3MjM1NC00LjYzMDYzNUMxLjMwNzA5OC01LjA2ODk5MSAxLjkyMDc5Ny01LjA5MjkwMiAyLjA2NDI1OS01LjA5MjkwMkMyLjI3MTQ4Mi01LjA5MjkwMiAyLjg3NzIxLTUuMDI5MTQxIDIuODc3MjEtNC4yMDgyMTlDMi44NzcyMS0zLjY1MDMxMSAyLjY0NjA3Ny0zLjMxNTU2NyAyLjUzNDQ5Ni0zLjE4ODA0NUMyLjI5NTM5Mi0yLjk0MDk3MSAyLjExMjA4LTIuOTI1MDMxIDEuNjI1OTAzLTIuODkzMTUxQzEuNDc0NDcxLTIuODg1MTgxIDEuNDEwNzEtMi44NzcyMSAxLjQxMDcxLTIuNzczNTk5QzEuNDEwNzEtMi42NjIwMTcgMS40ODI0NDEtMi42NjIwMTcgMS42MTc5MzMtMi42NjIwMTdIMi4wMTY0MzhaJy8+CjxwYXRoIGlkPSdnNC01MicgZD0nTTMuMTQwMjI0LTUuMTU2NjYzQzMuMTQwMjI0LTUuMzE2MDY1IDMuMTQwMjI0LTUuMzc5ODI2IDIuOTcyODUyLTUuMzc5ODI2QzIuODY5MjQtNS4zNzk4MjYgMi44NjEyNy01LjM3MTg1NiAyLjc4MTU2OS01LjI2MDI3NEwuMjM5MTAzLTEuNTcwMTEyVi0xLjMwNzA5OEgyLjQ4NjY3NVYtLjY0NTU3OUMyLjQ4NjY3NS0uMzUwNjg1IDIuNDYyNzY1LS4yNjMwMTQgMS44NDkwNjYtLjI2MzAxNEgxLjY2NTc1M1YwQzIuMzQzMjEzLS4wMjM5MSAyLjM1OTE1My0uMDIzOTEgMi44MTM0NS0uMDIzOTFTMy4yODM2ODYtLjAyMzkxIDMuOTYxMTQ2IDBWLS4yNjMwMTRIMy43Nzc4MzNDMy4xNjQxMzQtLjI2MzAxNCAzLjE0MDIyNC0uMzUwNjg1IDMuMTQwMjI0LS42NDU1NzlWLTEuMzA3MDk4SDMuOTg1MDU2Vi0xLjU3MDExMkgzLjE0MDIyNFYtNS4xNTY2NjNaTTIuNTQyNDY2LTQuNTExMDgzVi0xLjU3MDExMkguNTE4MDU3TDIuNTQyNDY2LTQuNTExMDgzWicvPgo8cGF0aCBpZD0nZzAtMjAnIGQ9J00yLjk4ODc5MiAyOC4yMDIyNDJINi4xMzMwMDFWMjcuNTQ0NzA3SDMuNjQ2MzI2Vi4xNzkzMjhINi4xMzMwMDFWLS40NzgyMDdIMi45ODg3OTJWMjguMjAyMjQyWicvPgo8cGF0aCBpZD0nZzAtMjEnIGQ9J00yLjY1NDA0NyAyNy41NDQ3MDdILjE2NzM3MlYyOC4yMDIyNDJIMy4zMTE1ODJWLS40NzgyMDdILjE2NzM3MlYuMTc5MzI4SDIuNjU0MDQ3VjI3LjU0NDcwN1onLz4KPHBhdGggaWQ9J2cwLTExNScgZD0nTTIuOTc2ODM3IDE3LjQ1NDU0NUwxLjM5ODc1NSAyMC41NjI4ODlDMS4zMzg5NzkgMjAuNjgyNDQxIDEuMzI3MDI0IDIwLjcwNjM1MSAxLjMyNzAyNCAyMC43MTgzMDZDMS4zMjcwMjQgMjAuNzY2MTI3IDEuNDgyNDQxIDIwLjg5NzYzNCAxLjQ5NDM5NiAyMC45MDk1ODlMMi4zMDczNDcgMTkuMzMxNTA3TDUuMDY4OTkxIDM1LjM4NzI5OEM1LjQzOTYwMSAzNS4zODcyOTggNS41MTEzMzMgMzUuMzg3Mjk4IDUuNTcxMTA4IDM1LjA3NjQ2M0wxMi4xOTQyNzEtLjIzOTEwM0MxMi4xOTQyNzEtLjM3MDYxIDEyLjA5ODYzLS40NzgyMDcgMTEuOTU1MTY4LS40NzgyMDdDMTEuNzYzODg1LS40NzgyMDcgMTEuNzI4MDItLjMyMjc5IDExLjY5MjE1NC0uMTE5NTUyTDUuNTcxMTA4IDMyLjQ1ODI4MUg1LjU1OTE1M0wyLjk3NjgzNyAxNy40NTQ1NDVaJy8+CjxwYXRoIGlkPSdnMS0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2c1LTQwJyBkPSdNMy44ODU0MyAyLjkwNTEwNkMzLjg4NTQzIDIuODY5MjQgMy44ODU0MyAyLjg0NTMzIDMuNjgyMTkyIDIuNjQyMDkyQzIuNDg2Njc1IDEuNDM0NjIgMS44MTcxODYtLjUzNzk4MyAxLjgxNzE4Ni0yLjk3NjgzN0MxLjgxNzE4Ni01LjI5NjEzOSAyLjM3OTA3OC03LjI5MjY1MyAzLjc2NTg3OC04LjcwMzM2MkMzLjg4NTQzLTguODEwOTU5IDMuODg1NDMtOC44MzQ4NjkgMy44ODU0My04Ljg3MDczNUMzLjg4NTQzLTguOTQyNDY2IDMuODI1NjU0LTguOTY2Mzc2IDMuNzc3ODMzLTguOTY2Mzc2QzMuNjIyNDE2LTguOTY2Mzc2IDIuNjQyMDkyLTguMTA1NjA0IDIuMDU2Mjg5LTYuOTMzOTk4QzEuNDQ2NTc1LTUuNzI2NTI2IDEuMTcxNjA2LTQuNDQ3MzIzIDEuMTcxNjA2LTIuOTc2ODM3QzEuMTcxNjA2LTEuOTEyODI3IDEuMzM4OTc5LS40OTAxNjIgMS45NjA2NDggLjc4OTA0MUMyLjY2NjAwMiAyLjIyMzY2MSAzLjY0NjMyNiAzLjAwMDc0NyAzLjc3NzgzMyAzLjAwMDc0N0MzLjgyNTY1NCAzLjAwMDc0NyAzLjg4NTQzIDIuOTc2ODM3IDMuODg1NDMgMi45MDUxMDZaJy8+CjxwYXRoIGlkPSdnNS00MScgZD0nTTMuMzcxMzU3LTIuOTc2ODM3QzMuMzcxMzU3LTMuODg1NDMgMy4yNTE4MDYtNS4zNjc4NyAyLjU4MjMxNi02Ljc1NDY3QzEuODc2OTYxLTguMTg5MjkgLjg5NjYzOC04Ljk2NjM3NiAuNzY1MTMxLTguOTY2Mzc2Qy43MTczMS04Ljk2NjM3NiAuNjU3NTM0LTguOTQyNDY2IC42NTc1MzQtOC44NzA3MzVDLjY1NzUzNC04LjgzNDg2OSAuNjU3NTM0LTguODEwOTU5IC44NjA3NzItOC42MDc3MjFDMi4wNTYyODktNy40MDAyNDkgMi43MjU3NzgtNS40Mjc2NDYgMi43MjU3NzgtMi45ODg3OTJDMi43MjU3NzgtLjY2OTQ4OSAyLjE2Mzg4NSAxLjMyNzAyNCAuNzc3MDg2IDIuNzM3NzMzQy42NTc1MzQgMi44NDUzMyAuNjU3NTM0IDIuODY5MjQgLjY1NzUzNCAyLjkwNTEwNkMuNjU3NTM0IDIuOTc2ODM3IC43MTczMSAzLjAwMDc0NyAuNzY1MTMxIDMuMDAwNzQ3Qy45MjA1NDggMy4wMDA3NDcgMS45MDA4NzIgMi4xMzk5NzUgMi40ODY2NzUgLjk2ODM2OUMzLjA5NjM4OS0uMjUxMDU5IDMuMzcxMzU3LTEuNTQyMjE3IDMuMzcxMzU3LTIuOTc2ODM3WicvPgo8cGF0aCBpZD0nZzUtNDMnIGQ9J000Ljc3MDExMi0yLjc2MTY0NEg4LjA2OTczOEM4LjIzNzExMS0yLjc2MTY0NCA4LjQ1MjMwNC0yLjc2MTY0NCA4LjQ1MjMwNC0yLjk3NjgzN0M4LjQ1MjMwNC0zLjIwMzk4NSA4LjI0OTA2Ni0zLjIwMzk4NSA4LjA2OTczOC0zLjIwMzk4NUg0Ljc3MDExMlYtNi41MDM2MTFDNC43NzAxMTItNi42NzA5ODQgNC43NzAxMTItNi44ODYxNzcgNC41NTQ5MTktNi44ODYxNzdDNC4zMjc3NzEtNi44ODYxNzcgNC4zMjc3NzEtNi42ODI5MzkgNC4zMjc3NzEtNi41MDM2MTFWLTMuMjAzOTg1SDEuMDI4MTQ0Qy44NjA3NzItMy4yMDM5ODUgLjY0NTU3OS0zLjIwMzk4NSAuNjQ1NTc5LTIuOTg4NzkyQy42NDU1NzktMi43NjE2NDQgLjg0ODgxNy0yLjc2MTY0NCAxLjAyODE0NC0yLjc2MTY0NEg0LjMyNzc3MVYuNTM3OTgzQzQuMzI3NzcxIC43MDUzNTUgNC4zMjc3NzEgLjkyMDU0OCA0LjU0Mjk2NCAuOTIwNTQ4QzQuNzcwMTEyIC45MjA1NDggNC43NzAxMTIgLjcxNzMxIDQuNzcwMTEyIC41Mzc5ODNWLTIuNzYxNjQ0WicvPgo8cGF0aCBpZD0nZzUtNTEnIGQ9J00yLjE5OTc1MS00LjI5MTkwNUMxLjk5NjUxMy00LjI3OTk1IDEuOTQ4NjkyLTQuMjY3OTk1IDEuOTQ4NjkyLTQuMTYwMzk5QzEuOTQ4NjkyLTQuMDQwODQ3IDIuMDA4NDY4LTQuMDQwODQ3IDIuMjIzNjYxLTQuMDQwODQ3SDIuNzczNTk5QzMuNzg5Nzg4LTQuMDQwODQ3IDQuMjQ0MDg1LTMuMjAzOTg1IDQuMjQ0MDg1LTIuMDU2Mjg5QzQuMjQ0MDg1LS40OTAxNjIgMy40MzExMzMtLjA3MTczMSAyLjg0NTMzLS4wNzE3MzFDMi4yNzE0ODItLjA3MTczMSAxLjI5MTE1OC0uMzQ2NyAuOTQ0NDU4LTEuMTM1NzQxQzEuMzI3MDI0LTEuMDc1OTY1IDEuNjczNzI0LTEuMjkxMTU4IDEuNjczNzI0LTEuNzIxNTQ0QzEuNjczNzI0LTIuMDY4MjQ0IDEuNDIyNjY1LTIuMzA3MzQ3IDEuMDg3OTItMi4zMDczNDdDLjgwMDk5Ni0yLjMwNzM0NyAuNDkwMTYyLTIuMTM5OTc1IC40OTAxNjItMS42ODU2NzlDLjQ5MDE2Mi0uNjIxNjY5IDEuNTU0MTcyIC4yNTEwNTkgMi44ODExOTYgLjI1MTA1OUM0LjMwMzg2MSAuMjUxMDU5IDUuMzU1OTE1LS44MzY4NjIgNS4zNTU5MTUtMi4wNDQzMzRDNS4zNTU5MTUtMy4xNDQyMDkgNC40NzEyMzMtNC4wMDQ5ODEgMy4zMjM1MzctNC4yMDgyMTlDNC4zNjM2MzYtNC41MDcwOTggNS4wMzMxMjYtNS4zNzk4MjYgNS4wMzMxMjYtNi4zMTIzMjlDNS4wMzMxMjYtNy4yNTY3ODcgNC4wNTI4MDItNy45NTAxODcgMi44OTMxNTEtNy45NTAxODdDMS42OTc2MzQtNy45NTAxODcgLjgxMjk1MS03LjIyMDkyMiAuODEyOTUxLTYuMzQ4MTk0Qy44MTI5NTEtNS44Njk5ODggMS4xODM1NjItNS43NzQzNDYgMS4zNjI4ODktNS43NzQzNDZDMS42MTM5NDgtNS43NzQzNDYgMS45MDA4NzItNS45NTM2NzQgMS45MDA4NzItNi4zMTIzMjlDMS45MDA4NzItNi42OTQ4OTQgMS42MTM5NDgtNi44NjIyNjcgMS4zNTA5MzQtNi44NjIyNjdDMS4yNzkyMDMtNi44NjIyNjcgMS4yNTUyOTMtNi44NjIyNjcgMS4yMTk0MjctNi44NTAzMTFDMS42NzM3MjQtNy42NjMyNjMgMi43OTc1MDktNy42NjMyNjMgMi44NTcyODUtNy42NjMyNjNDMy4yNTE4MDYtNy42NjMyNjMgNC4wMjg4OTItNy40ODM5MzUgNC4wMjg4OTItNi4zMTIzMjlDNC4wMjg4OTItNi4wODUxODEgMy45OTMwMjYtNS40MTU2OTEgMy42NDYzMjYtNC45MDE2MTlDMy4yODc2NzEtNC4zNzU1OTIgMi44ODExOTYtNC4zMzk3MjYgMi41NTg0MDYtNC4zMjc3NzFMMi4xOTk3NTEtNC4yOTE5MDVaJy8+CjxwYXRoIGlkPSdnNS01MicgZD0nTTQuMzE1ODE2LTcuNzgyODE0QzQuMzE1ODE2LTguMDA5OTYzIDQuMzE1ODE2LTguMDY5NzM4IDQuMTQ4NDQzLTguMDY5NzM4QzQuMDUyODAyLTguMDY5NzM4IDQuMDE2OTM2LTguMDY5NzM4IDMuOTIxMjk1LTcuOTI2Mjc2TC4zMjI3OS0yLjM0MzIxM1YtMS45OTY1MTNIMy40NjY5OTlWLS45MDg1OTNDMy40NjY5OTktLjQ2NjI1MiAzLjQ0MzA4OC0uMzQ2NyAyLjU3MDM2MS0uMzQ2N0gyLjMzMTI1OFYwQzIuNjA2MjI3LS4wMjM5MSAzLjU1MDY4NS0uMDIzOTEgMy44ODU0My0uMDIzOTFTNS4xNzY1ODgtLjAyMzkxIDUuNDUxNTU3IDBWLS4zNDY3SDUuMjEyNDUzQzQuMzUxNjgxLS4zNDY3IDQuMzE1ODE2LS40NjYyNTIgNC4zMTU4MTYtLjkwODU5M1YtMS45OTY1MTNINS41MjMyODhWLTIuMzQzMjEzSDQuMzE1ODE2Vi03Ljc4MjgxNFpNMy41MjY3NzUtNi44NTAzMTFWLTIuMzQzMjEzSC42MjE2NjlMMy41MjY3NzUtNi44NTAzMTFaJy8+CjxwYXRoIGlkPSdnNS02MScgZD0nTTguMDY5NzM4LTMuODczNDc0QzguMjM3MTExLTMuODczNDc0IDguNDUyMzA0LTMuODczNDc0IDguNDUyMzA0LTQuMDg4NjY3QzguNDUyMzA0LTQuMzE1ODE2IDguMjQ5MDY2LTQuMzE1ODE2IDguMDY5NzM4LTQuMzE1ODE2SDEuMDI4MTQ0Qy44NjA3NzItNC4zMTU4MTYgLjY0NTU3OS00LjMxNTgxNiAuNjQ1NTc5LTQuMTAwNjIzQy42NDU1NzktMy44NzM0NzQgLjg0ODgxNy0zLjg3MzQ3NCAxLjAyODE0NC0zLjg3MzQ3NEg4LjA2OTczOFpNOC4wNjk3MzgtMS42NDk4MTNDOC4yMzcxMTEtMS42NDk4MTMgOC40NTIzMDQtMS42NDk4MTMgOC40NTIzMDQtMS44NjUwMDZDOC40NTIzMDQtMi4wOTIxNTQgOC4yNDkwNjYtMi4wOTIxNTQgOC4wNjk3MzgtMi4wOTIxNTRIMS4wMjgxNDRDLjg2MDc3Mi0yLjA5MjE1NCAuNjQ1NTc5LTIuMDkyMTU0IC42NDU1NzktMS44NzY5NjFDLjY0NTU3OS0xLjY0OTgxMyAuODQ4ODE3LTEuNjQ5ODEzIDEuMDI4MTQ0LTEuNjQ5ODEzSDguMDY5NzM4WicvPgo8cGF0aCBpZD0nZzItOTcnIGQ9J00zLjEyNDI4NC0zLjAzNjYxM0MzLjA1MjU1My0zLjE3MjEwNSAyLjgyMTQyLTMuNTE0ODE5IDIuMzM1MjQzLTMuNTE0ODE5QzEuMzg2OC0zLjUxNDgxOSAuMzQyNzE1LTIuNDA2OTc0IC4zNDI3MTUtMS4yMjczOTdDLjM0MjcxNS0uMzk4NTA2IC44NzY3MTIgLjA3OTcwMSAxLjQ5MDQxMSAuMDc5NzAxQzIuMDAwNDk4IC4wNzk3MDEgMi40Mzg4NTQtLjMyNjc3NSAyLjU4MjMxNi0uNDg2MTc3QzIuNzI1Nzc4IC4wNjM3NjEgMy4yNjc3NDYgLjA3OTcwMSAzLjM2MzM4NyAuMDc5NzAxQzMuNzMwMDEyIC4wNzk3MDEgMy45MTMzMjUtLjIyMzE2MyAzLjk3NzA4Ni0uMzU4NjU1QzQuMTM2NDg4LS42NDU1NzkgNC4yNDgwNy0xLjEwNzg0NiA0LjI0ODA3LTEuMTM5NzI2QzQuMjQ4MDctMS4xODc1NDcgNC4yMTYxODktMS4yNDMzMzcgNC4xMjA1NDgtMS4yNDMzMzdTNC4wMDg5NjYtMS4xOTU1MTcgMy45NjExNDYtLjk5NjI2NEMzLjg0OTU2NC0uNTU3OTA4IDMuNjk4MTMyLS4xNDM0NjIgMy4zODcyOTgtLjE0MzQ2MkMzLjIwMzk4NS0uMTQzNDYyIDMuMTMyMjU0LS4yOTQ4OTQgMy4xMzIyNTQtLjUxODA1N0MzLjEzMjI1NC0uNjUzNTQ5IDMuMjAzOTg1LS45MjQ1MzMgMy4yNTE4MDYtMS4xMjM3ODZTMy40MTkxNzgtMS44MDEyNDUgMy40NTEwNTktMS45NDQ3MDdMMy42MTA0NjEtMi41NTA0MzZDMy42NTAzMTEtMi43NDE3MTkgMy43Mzc5ODMtMy4wNzY0NjMgMy43Mzc5ODMtMy4xMTYzMTRDMy43Mzc5ODMtMy4yOTk2MjYgMy41ODY1NS0zLjM2MzM4NyAzLjQ4MjkzOS0zLjM2MzM4N0MzLjM2MzM4Ny0zLjM2MzM4NyAzLjE2NDEzNC0zLjI4MzY4NiAzLjEyNDI4NC0zLjAzNjYxM1pNMi41ODIzMTYtLjg2MDc3MkMyLjE4MzgxMS0uMzEwODM0IDEuNzY5MzY1LS4xNDM0NjIgMS41MTQzMjEtLjE0MzQ2MkMxLjE0NzY5Ni0uMTQzNDYyIC45NjQzODQtLjQ3ODIwNyAuOTY0Mzg0LS44OTI2NTNDLjk2NDM4NC0xLjI2NzI0OCAxLjE3OTU3Ny0yLjEyMDA1IDEuMzU0OTE5LTIuNDcwNzM1QzEuNTg2MDUyLTIuOTU2OTEyIDEuOTc2NTg4LTMuMjkxNjU2IDIuMzQzMjEzLTMuMjkxNjU2QzIuODYxMjctMy4yOTE2NTYgMy4wMTI3MDItMi43MDk4MzggMy4wMTI3MDItMi42MTQxOTdDMy4wMTI3MDItMi41ODIzMTYgMi44MTM0NS0xLjgwMTI0NSAyLjc2NTYyOS0xLjU5NDAyMkMyLjY2MjAxNy0xLjIxOTQyNyAyLjY2MjAxNy0xLjIwMzQ4NyAyLjU4MjMxNi0uODYwNzcyWicvPgo8cGF0aCBpZD0nZzItMTEyJyBkPSdNLjQxNDQ0NiAuOTY0Mzg0Qy4zNTA2ODUgMS4yMTk0MjcgLjMzNDc0NSAxLjI4MzE4OCAuMDE1OTQgMS4yODMxODhDLS4wOTU2NDEgMS4yODMxODgtLjE5MTI4MyAxLjI4MzE4OC0uMTkxMjgzIDEuNDM0NjJDLS4xOTEyODMgMS41MDYzNTEtLjExOTU1MiAxLjU0NjIwMi0uMDc5NzAxIDEuNTQ2MjAyQzAgMS41NDYyMDIgLjAzMTg4IDEuNTIyMjkxIC42MjE2NjkgMS41MjIyOTFDMS4xOTU1MTcgMS41MjIyOTEgMS4zNjI4ODkgMS41NDYyMDIgMS40MTg2OCAxLjU0NjIwMkMxLjQ1MDU2IDEuNTQ2MjAyIDEuNTcwMTEyIDEuNTQ2MjAyIDEuNTcwMTEyIDEuMzk0NzdDMS41NzAxMTIgMS4yODMxODggMS40NTg1MzEgMS4yODMxODggMS4zNjI4ODkgMS4yODMxODhDLjk4MDMyNCAxLjI4MzE4OCAuOTgwMzI0IDEuMjM1MzY3IC45ODAzMjQgMS4xNjM2MzZDLjk4MDMyNCAxLjEwNzg0NiAxLjEyMzc4NiAuNTQxOTY4IDEuMzYyODg5LS4zOTA1MzVDMS40NjY1MDEtLjIwNzIyMyAxLjcxMzU3NCAuMDc5NzAxIDIuMTQzOTYgLjA3OTcwMUMzLjEyNDI4NCAuMDc5NzAxIDQuMTQ0NDU4LTEuMDUyMDU1IDQuMTQ0NDU4LTIuMjA3NzIxQzQuMTQ0NDU4LTIuOTk2NzYyIDMuNjM0MzcxLTMuNTE0ODE5IDIuOTk2NzYyLTMuNTE0ODE5QzIuNTE4NTU1LTMuNTE0ODE5IDIuMTM1OTktMy4xODgwNDUgMS45MDQ4NTctMi45NDg5NDFDMS43Mzc0ODQtMy41MTQ4MTkgMS4yMDM0ODctMy41MTQ4MTkgMS4xMjM3ODYtMy41MTQ4MTlDLjgzNjg2Mi0zLjUxNDgxOSAuNjM3NjA5LTMuMzMxNTA3IC41MTAwODctMy4wODQ0MzNDLjMyNjc3NS0yLjcyNTc3OCAuMjM5MTAzLTIuMzE5MzAzIC4yMzkxMDMtMi4yOTUzOTJDLjIzOTEwMy0yLjIyMzY2MSAuMjk0ODk0LTIuMTkxNzgxIC4zNTg2NTUtMi4xOTE3ODFDLjQ2MjI2Ny0yLjE5MTc4MSAuNDcwMjM3LTIuMjIzNjYxIC41MjYwMjctMi40MzA4ODRDLjYyOTYzOS0yLjgzNzM2IC43NzMxMDEtMy4yOTE2NTYgMS4wOTk4NzUtMy4yOTE2NTZDMS4yOTkxMjgtMy4yOTE2NTYgMS4zNTQ5MTktMy4xMDgzNDQgMS4zNTQ5MTktMi45MTcwNjFDMS4zNTQ5MTktMi44MzczNiAxLjMyMzAzOS0yLjY0NjA3NyAxLjMwNzA5OC0yLjU4MjMxNkwuNDE0NDQ2IC45NjQzODRaTTEuODgwOTQ2LTIuNDU0Nzk1QzEuOTIwNzk3LTIuNTkwMjg2IDEuOTIwNzk3LTIuNjA2MjI3IDIuMDQwMzQ5LTIuNzQ5Njg5QzIuMzQzMjEzLTMuMTA4MzQ0IDIuNjg1OTI4LTMuMjkxNjU2IDIuOTcyODUyLTMuMjkxNjU2QzMuMzcxMzU3LTMuMjkxNjU2IDMuNTIyNzktMi45MDExMjEgMy41MjI3OS0yLjU0MjQ2NkMzLjUyMjc5LTIuMjQ3NTcyIDMuMzQ3NDQ3LTEuMzk0NzcgMy4xMDgzNDQtLjkyNDUzM0MyLjkwMTEyMS0uNDk0MTQ3IDIuNTE4NTU1LS4xNDM0NjIgMi4xNDM5Ni0uMTQzNDYyQzEuNjAxOTkzLS4xNDM0NjIgMS40NzQ0NzEtLjc2NTEzMSAxLjQ3NDQ3MS0uODIwOTIyQzEuNDc0NDcxLS44MzY4NjIgMS40OTA0MTEtLjkyNDUzMyAxLjQ5ODM4MS0uOTQ4NDQzTDEuODgwOTQ2LTIuNDU0Nzk1WicvPgo8cGF0aCBpZD0nZzItMTE1JyBkPSdNMy4yMTE5NTUtMi45OTY3NjJDMy4wMjg2NDMtMi45NjQ4ODIgMi44NjEyNy0yLjgyMTQyIDIuODYxMjctMi42MjIxNjdDMi44NjEyNy0yLjQ3ODcwNSAyLjk1NjkxMi0yLjM3NTA5MyAzLjEzMjI1NC0yLjM3NTA5M0MzLjI1MTgwNi0yLjM3NTA5MyAzLjQ5ODg3OS0yLjQ2Mjc2NSAzLjQ5ODg3OS0yLjgyMTQyQzMuNDk4ODc5LTMuMzE1NTY3IDIuOTgwODIyLTMuNTE0ODE5IDIuNDg2Njc1LTMuNTE0ODE5QzEuNDE4NjgtMy41MTQ4MTkgMS4wODM5MzUtMi43NTc2NTkgMS4wODM5MzUtMi4zNTExODNDMS4wODM5MzUtMi4yNzE0ODIgMS4wODM5MzUtMS45ODQ1NTggMS4zNzg4MjktMS43NjEzOTVDMS41NjIxNDItMS42MTc5MzMgMS42OTc2MzQtMS41OTQwMjIgMi4xMTIwOC0xLjUxNDMyMUMyLjM5MTAzNC0xLjQ1ODUzMSAyLjg0NTMzLTEuMzc4ODI5IDIuODQ1MzMtLjk2NDM4NEMyLjg0NTMzLS43NTcxNjEgMi42OTM4OTgtLjQ5NDE0NyAyLjQ3MDczNS0uMzQyNzE1QzIuMTc1ODQxLS4xNTE0MzIgMS43ODUzMDUtLjE0MzQ2MiAxLjY1Nzc4My0uMTQzNDYyQzEuNDY2NTAxLS4xNDM0NjIgLjkyNDUzMy0uMTc1MzQyIC43MjUyOC0uNDk0MTQ3QzEuMTMxNzU2LS41MTAwODcgMS4xODc1NDctLjgzNjg2MiAxLjE4NzU0Ny0uOTMyNTAzQzEuMTg3NTQ3LTEuMTcxNjA2IC45NzIzNTQtMS4yMjczOTcgLjg3NjcxMi0xLjIyNzM5N0MuNzQ5MTkxLTEuMjI3Mzk3IC40MjI0MTYtMS4xMzE3NTYgLjQyMjQxNi0uNjkzNEMuNDIyNDE2LS4yMjMxNjMgLjkxNjU2MyAuMDc5NzAxIDEuNjU3NzgzIC4wNzk3MDFDMy4wNDQ1ODMgLjA3OTcwMSAzLjMzOTQ3Ny0uOTAwNjIzIDMuMzM5NDc3LTEuMjM1MzY3QzMuMzM5NDc3LTEuOTUyNjc3IDIuNTU4NDA2LTIuMTA0MTEgMi4yNjM1MTItMi4xNTk5QzEuODgwOTQ2LTIuMjMxNjMxIDEuNTcwMTEyLTIuMjg3NDIyIDEuNTcwMTEyLTIuNjIyMTY3QzEuNTcwMTEyLTIuNzY1NjI5IDEuNzA1NjA0LTMuMjkxNjU2IDIuNDc4NzA1LTMuMjkxNjU2QzIuNzgxNTY5LTMuMjkxNjU2IDMuMDkyNDAzLTMuMjAzOTg1IDMuMjExOTU1LTIuOTk2NzYyWicvPgo8cGF0aCBpZD0nZzMtMTMnIGQ9J000LjUxOTA1NC0xLjQ1ODUzMUM0LjQ5NTE0My0yLjA0NDMzNCA0LjQ3MTIzMy0yLjk2NDg4MiA0LjAxNjkzNi00LjA0MDg0N0MzLjc3NzgzMy00LjYzODYwNSAzLjM3MTM1Ny01LjI3MjIyOSAyLjQ5ODYzLTUuMjcyMjI5QzEuMDI4MTQ0LTUuMjcyMjI5IC4yMjcxNDgtMy4zOTUyNjggLjIyNzE0OC0zLjA4NDQzM0MuMjI3MTQ4LTIuOTc2ODM3IC4zMTA4MzQtMi45NzY4MzcgLjM0NjctMi45NzY4MzdDLjQ1NDI5Ni0yLjk3NjgzNyAuNDU0Mjk2LTMuMDAwNzQ3IC41MTQwNzItMy4xNTYxNjRDLjc2NTEzMS0zLjg5NzM4NSAxLjUzMDI2Mi00LjQ4MzE4OCAyLjM1NTE2OC00LjQ4MzE4OEM0LjAxNjkzNi00LjQ4MzE4OCA0LjI1NjA0LTIuNjMwMTM3IDQuMjU2MDQtMS40NDY1NzVDNC4yNTYwNC0uNjkzNCA0LjE3MjM1NC0uNDQyMzQxIDQuMTAwNjIzLS4yMDMyMzhDMy44NzM0NzQgLjUzNzk4MyAzLjQ3ODk1NCAyLjAyMDQyMyAzLjQ3ODk1NCAyLjM1NTE2OEMzLjQ3ODk1NCAyLjQ1MDgwOSAzLjUxNDgxOSAyLjU1ODQwNiAzLjYxMDQ2MSAyLjU1ODQwNkMzLjc4OTc4OCAyLjU1ODQwNiAzLjg5NzM4NSAyLjE2Mzg4NSA0LjAyODg5MiAxLjY4NTY3OUM0LjMxNTgxNiAuNjMzNjI0IDQuMzg3NTQ3IC4xMDc1OTcgNC40NDczMjMtLjM3MDYxQzQuNDgzMTg4LS42NTc1MzQgNS4xNjQ2MzMtMi42MzAxMzcgNi4xMDkwOTEtNC41MDcwOThDNi4xOTI3NzctNC42OTgzODEgNi4zNjAxNDktNS4wMjExNzEgNi4zNjAxNDktNS4wNTcwMzZDNi4zNjAxNDktNS4wNjg5OTEgNi4zNDgxOTQtNS4xNTI2NzcgNi4yNDA1OTgtNS4xNTI2NzdDNi4yMTY2ODctNS4xNTI2NzcgNi4xNTY5MTItNS4xNTI2NzcgNi4xMzMwMDEtNS4xMDQ4NTdDNi4xMDkwOTEtNS4wODA5NDYgNS42OTA2Ni00LjI2Nzk5NSA1LjMzMjAwNS0zLjQ1NTA0NEM1LjE1MjY3Ny0zLjA0ODU2OCA0LjkxMzU3NC0yLjUxMDU4NSA0LjUxOTA1NC0xLjQ1ODUzMVonLz4KPHBhdGggaWQ9J2czLTE2JyBkPSdNMi4yNTk1MjctLjU4NTgwM0MxLjU1NDE3Mi0uODYwNzcyIDEuMTQ3Njk2LTEuMzk4NzU1IDEuMTQ3Njk2LTIuMjk1MzkyQzEuMTQ3Njk2LTMuOTMzMjUgMi4zNTUxNjgtNi4xMjEwNDYgMy44MjU2NTQtNi45Njk4NjNDNC4wNDA4NDctNi43NjY2MjUgNC4zMTU4MTYtNi43NjY2MjUgNC41NDI5NjQtNi43NjY2MjVDNC44NDE4NDMtNi43NjY2MjUgNS41NzExMDgtNi43NjY2MjUgNS41NzExMDgtNy4xMTMzMjVDNS41NzExMDgtNy40MDAyNDkgNS4wMzMxMjYtNy40MTIyMDQgNC42NTA1Ni03LjQxMjIwNEM0LjQxMTQ1Ny03LjQxMjIwNCA0LjIwODIxOS03LjQxMjIwNCAzLjg5NzM4NS03LjI4MDY5N0MzLjgyNTY1NC03LjQzNjExNSAzLjc4OTc4OC03LjYwMzQ4NyAzLjc4OTc4OC03Ljc4MjgxNEMzLjc4OTc4OC03Ljk5ODAwNyAzLjgzNzYwOS04LjE2NTM4IDMuODM3NjA5LTguMjAxMjQ1QzMuODM3NjA5LTguMjcyOTc2IDMuNzc3ODMzLTguMzIwNzk3IDMuNzE4MDU3LTguMzIwNzk3QzMuNTI2Nzc1LTguMzIwNzk3IDMuNTI2Nzc1LTcuODc4NDU2IDMuNTI2Nzc1LTcuNzgyODE0QzMuNTI2Nzc1LTcuNjc1MjE4IDMuNTI2Nzc1LTcuNDI0MTU5IDMuNjcwMjM3LTcuMTczMTAxQzIuMjgzNDM3LTYuNDU1NzkxIC41Mzc5ODMtNC4yMjAxNzQgLjUzNzk4My0xLjk4NDU1OEMuNTM3OTgzLS4zNDY3IDEuNjI1OTAzIC4wMzU4NjYgMi4yNDc1NzIgLjI1MTA1OUMyLjQwMjk4OSAuMjk4ODc5IDIuNzg1NTU0IC40MzAzODYgMi45NDA5NzEgLjQ5MDE2MkMzLjQzMTEzMyAuNjU3NTM0IDMuODk3Mzg1IC44MTI5NTEgMy44OTczODUgMS4zODY4QzMuODk3Mzg1IDEuNzMzNDk5IDMuNjQ2MzI2IDIuMTk5NzUxIDMuMjAzOTg1IDIuMTk5NzUxQzIuOTY0ODgyIDIuMTk5NzUxIDIuNjQyMDkyIDIuMTE2MDY1IDIuMzQzMjEzIDEuODE3MTg2QzIuMjk1MzkyIDEuNzY5MzY1IDIuMjcxNDgyIDEuNzQ1NDU1IDIuMjExNzA2IDEuNzQ1NDU1QzIuMTE2MDY1IDEuNzQ1NDU1IDIuMDkyMTU0IDEuODQxMDk2IDIuMDkyMTU0IDEuODY1MDA2QzIuMDkyMTU0IDEuOTg0NTU4IDIuNjA2MjI3IDIuNDM4ODU0IDMuMjAzOTg1IDIuNDM4ODU0QzMuOTY5MTE2IDIuNDM4ODU0IDQuNDk1MTQzIDEuNjM3ODU4IDQuNDk1MTQzIDEuMDE2MTg5QzQuNDk1MTQzIC4xNzkzMjggMy44MDE3NDMtLjA1OTc3NiAzLjM1OTQwMi0uMjAzMjM4TDIuMjU5NTI3LS41ODU4MDNaTTQuMDg4NjY3LTcuMDg5NDE1QzQuMjY3OTk1LTcuMTczMTAxIDQuNDM1MzY3LTcuMTczMTAxIDQuNjM4NjA1LTcuMTczMTAxQzUuMDIxMTcxLTcuMTczMTAxIDUuMDU3MDM2LTcuMTYxMTQ2IDUuMjk2MTM5LTcuMTAxMzdDNS4xNTI2NzctNy4wNDE1OTQgNS4wNTcwMzYtNy4wMDU3MjkgNC41NTQ5MTktNy4wMDU3MjlDNC4zMDM4NjEtNy4wMDU3MjkgNC4yMjAxNzQtNy4wMDU3MjkgNC4wODg2NjctNy4wODk0MTVaJy8+CjxwYXRoIGlkPSdnMy0xOCcgZD0nTTUuMjk2MTM5LTYuMDEzNDVDNS4yOTYxMzktNy4yMzI4NzcgNC45MTM1NzQtOC40MTY0MzggMy45MzMyNS04LjQxNjQzOEMyLjI1OTUyNy04LjQxNjQzOCAuNDc4MjA3LTQuOTEzNTc0IC40NzgyMDctMi4yODM0MzdDLjQ3ODIwNy0xLjczMzQ5OSAuNTk3NzU4IC4xMTk1NTIgMS44NTMwNTEgLjExOTU1MkMzLjQ3ODk1NCAuMTE5NTUyIDUuMjk2MTM5LTMuMjk5NjI2IDUuMjk2MTM5LTYuMDEzNDVaTTEuNjczNzI0LTQuMzI3NzcxQzEuODUzMDUxLTUuMDMzMTI2IDIuMTA0MTEtNi4wMzczNiAyLjU4MjMxNi02Ljg4NjE3N0MyLjk3NjgzNy03LjYwMzQ4NyAzLjM5NTI2OC04LjE3NzMzNSAzLjkyMTI5NS04LjE3NzMzNUM0LjMxNTgxNi04LjE3NzMzNSA0LjU3ODgyOS03Ljg0MjU5IDQuNTc4ODI5LTYuNjk0ODk0QzQuNTc4ODI5LTYuMjY0NTA4IDQuNTQyOTY0LTUuNjY2NzUgNC4xOTYyNjQtNC4zMjc3NzFIMS42NzM3MjRaTTQuMTEyNTc4LTMuOTY5MTE2QzMuODEzNjk5LTIuNzk3NTA5IDMuNTYyNjQtMi4wNDQzMzQgMy4xMzIyNTQtMS4yOTExNThDMi43ODU1NTQtLjY4MTQ0NSAyLjM2NzEyMy0uMTE5NTUyIDEuODY1MDA2LS4xMTk1NTJDMS40OTQzOTYtLjExOTU1MiAxLjE5NTUxNy0uNDA2NDc2IDEuMTk1NTE3LTEuNTkwMDM3QzEuMTk1NTE3LTIuMzY3MTIzIDEuMzg2OC0zLjE4MDA3NSAxLjU3ODA4Mi0zLjk2OTExNkg0LjExMjU3OFonLz4KPHBhdGggaWQ9J2czLTI1JyBkPSdNMy4wOTYzODktNC41MDcwOThINC40NDczMjNDNC4xMjQ1MzMtMy4xNjgxMiAzLjkyMTI5NS0yLjI5NTM5MiAzLjkyMTI5NS0xLjMzODk3OUMzLjkyMTI5NS0xLjE3MTYwNiAzLjkyMTI5NSAuMTE5NTUyIDQuNDExNDU3IC4xMTk1NTJDNC42NjI1MTYgLjExOTU1MiA0Ljg3NzcwOS0uMTA3NTk3IDQuODc3NzA5LS4zMTA4MzRDNC44Nzc3MDktLjM3MDYxIDQuODc3NzA5LS4zOTQ1MjEgNC43OTQwMjItLjU3Mzg0OEM0LjQ3MTIzMy0xLjM5ODc1NSA0LjQ3MTIzMy0yLjQyNjg5OSA0LjQ3MTIzMy0yLjUxMDU4NUM0LjQ3MTIzMy0yLjU4MjMxNiA0LjQ3MTIzMy0zLjQzMTEzMyA0LjcyMjI5MS00LjUwNzA5OEg2LjA2MTI3QzYuMjE2Njg3LTQuNTA3MDk4IDYuNjExMjA4LTQuNTA3MDk4IDYuNjExMjA4LTQuODg5NjY0QzYuNjExMjA4LTUuMTUyNjc3IDYuMzg0MDYtNS4xNTI2NzcgNi4xNjg4NjctNS4xNTI2NzdIMi4yMzU2MTZDMS45NjA2NDgtNS4xNTI2NzcgMS41NTQxNzItNS4xNTI2NzcgMS4wMDQyMzQtNC41NjY4NzRDLjY5MzQtNC4yMjAxNzQgLjMxMDgzNC0zLjU4NjU1IC4zMTA4MzQtMy41MTQ4MTlTLjM3MDYxLTMuNDE5MTc4IC40NDIzNDEtMy40MTkxNzhDLjUyNjAyNy0zLjQxOTE3OCAuNTM3OTgzLTMuNDU1MDQ0IC41OTc3NTgtMy41MjY3NzVDMS4yMTk0MjctNC41MDcwOTggMS44NDEwOTYtNC41MDcwOTggMi4xMzk5NzUtNC41MDcwOThIMi44MjE0MkMyLjU1ODQwNi0zLjYxMDQ2MSAyLjI1OTUyNy0yLjU3MDM2MSAxLjI3OTIwMy0uNDc4MjA3QzEuMTgzNTYyLS4yODY5MjQgMS4xODM1NjItLjI2MzAxNCAxLjE4MzU2Mi0uMTkxMjgzQzEuMTgzNTYyIC4wNTk3NzYgMS4zOTg3NTUgLjExOTU1MiAxLjUwNjM1MSAuMTE5NTUyQzEuODUzMDUxIC4xMTk1NTIgMS45NDg2OTItLjE5MTI4MyAyLjA5MjE1NC0uNjkzNEMyLjI4MzQzNy0xLjMwMzExMyAyLjI4MzQzNy0xLjMyNzAyNCAyLjQwMjk4OS0xLjgwNTIzTDMuMDk2Mzg5LTQuNTA3MDk4WicvPgo8cGF0aCBpZD0nZzMtMzMnIGQ9J003LjEwMTM3LTQuNDk1MTQzQzcuMTAxMzctNC44NDE4NDMgNy4wMDU3MjktNS4yODQxODQgNi41ODcyOTgtNS4yODQxODRDNi4zNDgxOTQtNS4yODQxODQgNi4wNzMyMjUtNC45ODUzMDUgNi4wNzMyMjUtNC43NDYyMDJDNi4wNzMyMjUtNC42Mzg2MDUgNi4xMjEwNDYtNC41NjY4NzQgNi4yMTY2ODctNC40NTkyNzhDNi4zOTYwMTUtNC4yNTYwNCA2LjYyMzE2My0zLjkzMzI1IDYuNjIzMTYzLTMuMzcxMzU3QzYuNjIzMTYzLTIuOTQwOTcxIDYuMzYwMTQ5LTIuMjU5NTI3IDYuMTY4ODY3LTEuODg4OTE3QzUuODM0MTIyLTEuMjMxMzgyIDUuMjg0MTg0LS42Njk0ODkgNC42NjI1MTYtLjY2OTQ4OUMzLjkwOTM0LS42Njk0ODkgMy42MjI0MTYtMS4xNDc2OTYgMy40OTA5MDktMS44MTcxODZDMy42MjI0MTYtMi4xMjgwMiAzLjg5NzM4NS0yLjkwNTEwNiAzLjg5NzM4NS0zLjIxNTk0QzMuODk3Mzg1LTMuMzQ3NDQ3IDMuODQ5NTY0LTMuNDU1MDQ0IDMuNjk0MTQ3LTMuNDU1MDQ0QzMuNjEwNDYxLTMuNDU1MDQ0IDMuNTE0ODE5LTMuNDA3MjIzIDMuNDU1MDQ0LTMuMzExNTgyQzMuMjg3NjcxLTMuMDQ4NTY4IDMuMTMyMjU0LTIuMTA0MTEgMy4xNDQyMDktMS44NTMwNTFDMi45MTcwNjEtMS40MTA3MSAyLjI3MTQ4Mi0uNjY5NDg5IDEuNTA2MzUxLS42Njk0ODlDLjcwNTM1NS0uNjY5NDg5IC40OTAxNjItMS4zNzQ4NDQgLjQ5MDE2Mi0yLjA1NjI4OUMuNDkwMTYyLTMuMjk5NjI2IDEuMjY3MjQ4LTQuMzg3NTQ3IDEuNDgyNDQxLTQuNjg2NDI2QzEuNjAxOTkzLTQuODY1NzUzIDEuNjg1Njc5LTQuOTg1MzA1IDEuNjg1Njc5LTUuMDA5MjE1QzEuNjg1Njc5LTUuMDkyOTAyIDEuNjM3ODU4LTUuMjI0NDA4IDEuNTMwMjYyLTUuMjI0NDA4QzEuMzM4OTc5LTUuMjI0NDA4IDEuMjc5MjAzLTUuMDY4OTkxIDEuMTgzNTYyLTQuOTI1NTI5Qy41NzM4NDgtMy45ODEwNzEgLjE0MzQ2Mi0yLjY1NDA0NyAuMTQzNDYyLTEuNTA2MzUxQy4xNDM0NjItLjc2NTEzMSAuNDE4NDMxIC4xMTk1NTIgMS4zMTUwNjggLjExOTU1MkMyLjMwNzM0NyAuMTE5NTUyIDIuOTI5MDE2LS43MjkyNjUgMy4xODAwNzUtMS4xODM1NjJDMy4yNzU3MTYtLjUxNDA3MiAzLjYzNDM3MSAuMTE5NTUyIDQuNTA3MDk4IC4xMTk1NTJDNS40MTU2OTEgLjExOTU1MiA1Ljk4OTUzOS0uNjgxNDQ1IDYuNDE5OTI1LTEuNjQ5ODEzQzYuNzMwNzYtMi4zNDMyMTMgNy4xMDEzNy0zLjgzNzYwOSA3LjEwMTM3LTQuNDk1MTQzWicvPgo8cGF0aCBpZD0nZzMtNzAnIGQ9J00zLjU1MDY4NS0zLjg5NzM4NUg0LjY5ODM4MUM1LjYwNjk3NC0zLjg5NzM4NSA1LjY3ODcwNS0zLjY5NDE0NyA1LjY3ODcwNS0zLjM0NzQ0N0M1LjY3ODcwNS0zLjE5MjAzIDUuNjU0Nzk1LTMuMDI0NjU4IDUuNTk1MDE5LTIuNzYxNjQ0QzUuNTcxMTA4LTIuNzEzODIzIDUuNTU5MTUzLTIuNjU0MDQ3IDUuNTU5MTUzLTIuNjMwMTM3QzUuNTU5MTUzLTIuNTQ2NDUxIDUuNjA2OTc0LTIuNDk4NjMgNS42OTA2Ni0yLjQ5ODYzQzUuNzg2MzAxLTIuNDk4NjMgNS43OTgyNTctMi41NDY0NTEgNS44NDYwNzctMi43Mzc3MzNMNi41Mzk0NzctNS41MjMyODhDNi41Mzk0NzctNS41NzExMDggNi41MDM2MTEtNS42NDI4MzkgNi40MTk5MjUtNS42NDI4MzlDNi4zMTIzMjktNS42NDI4MzkgNi4zMDAzNzQtNS41OTUwMTkgNi4yNTI1NTMtNS4zOTE3ODFDNi4wMDE0OTQtNC40OTUxNDMgNS43NjIzOTEtNC4yNDQwODUgNC43MjIyOTEtNC4yNDQwODVIMy42MzQzNzFMNC40MTE0NTctNy4zNDA0NzNDNC41MTkwNTQtNy43NTg5MDQgNC41NDI5NjQtNy43OTQ3NyA1LjAzMzEyNi03Ljc5NDc3SDYuNjM1MTE4QzguMTI5NTE0LTcuNzk0NzcgOC4zNDQ3MDctNy4zNTI0MjggOC4zNDQ3MDctNi41MDM2MTFDOC4zNDQ3MDctNi40MzE4OCA4LjM0NDcwNy02LjE2ODg2NyA4LjMwODg0Mi01Ljg1ODAzMkM4LjI5Njg4Ny01LjgxMDIxMiA4LjI3Mjk3Ni01LjY1NDc5NSA4LjI3Mjk3Ni01LjYwNjk3NEM4LjI3Mjk3Ni01LjUxMTMzMyA4LjMzMjc1Mi01LjQ3NTQ2NyA4LjQwNDQ4My01LjQ3NTQ2N0M4LjQ4ODE2OS01LjQ3NTQ2NyA4LjUzNTk5LTUuNTIzMjg4IDguNTU5OS01LjczODQ4MUw4LjgxMDk1OS03LjgzMDYzNUM4LjgxMDk1OS03Ljg2NjUwMSA4LjgzNDg2OS03Ljk4NjA1MiA4LjgzNDg2OS04LjAwOTk2M0M4LjgzNDg2OS04LjE0MTQ2OSA4LjcyNzI3My04LjE0MTQ2OSA4LjUxMjA4LTguMTQxNDY5SDIuODQ1MzNDMi42MTgxODItOC4xNDE0NjkgMi40OTg2My04LjE0MTQ2OSAyLjQ5ODYzLTcuOTI2Mjc2QzIuNDk4NjMtNy43OTQ3NyAyLjU4MjMxNi03Ljc5NDc3IDIuNzg1NTU0LTcuNzk0NzdDMy41MjY3NzUtNy43OTQ3NyAzLjUyNjc3NS03LjcxMTA4MyAzLjUyNjc3NS03LjU3OTU3N0MzLjUyNjc3NS03LjUxOTgwMSAzLjUxNDgxOS03LjQ3MTk4IDMuNDc4OTU0LTcuMzQwNDczTDEuODY1MDA2LS44ODQ2ODJDMS43NTc0MS0uNDY2MjUyIDEuNzMzNDk5LS4zNDY3IC44OTY2MzgtLjM0NjdDLjY2OTQ4OS0uMzQ2NyAuNTQ5OTM4LS4zNDY3IC41NDk5MzgtLjEzMTUwN0MuNTQ5OTM4IDAgLjY1NzUzNCAwIC43MjkyNjUgMEMuOTU2NDEzIDAgMS4xOTU1MTctLjAyMzkxIDEuNDIyNjY1LS4wMjM5MUgyLjk3NjgzN0MzLjIzOTg1MS0uMDIzOTEgMy41MjY3NzUgMCAzLjc4OTc4OCAwQzMuODk3Mzg1IDAgNC4wNDA4NDcgMCA0LjA0MDg0Ny0uMjE1MTkzQzQuMDQwODQ3LS4zNDY3IDMuOTY5MTE2LS4zNDY3IDMuNzA2MTAyLS4zNDY3QzIuNzYxNjQ0LS4zNDY3IDIuNzM3NzMzLS40MzAzODYgMi43Mzc3MzMtLjYwOTcxNEMyLjczNzczMy0uNjY5NDg5IDIuNzYxNjQ0LS43NjUxMzEgMi43ODU1NTQtLjg0ODgxN0wzLjU1MDY4NS0zLjg5NzM4NVonLz4KPHBhdGggaWQ9J2czLTcxJyBkPSdNOC45MTg1NTUtOC4zMDg4NDJDOC45MTg1NTUtOC40MTY0MzggOC44MzQ4NjktOC40MTY0MzggOC44MTA5NTktOC40MTY0MzhTOC43MzkyMjgtOC40MTY0MzggOC42NDM1ODctOC4yOTY4ODdMNy44MTg2OC03LjMwNDYwOEM3Ljc1ODkwNC03LjQwMDI0OSA3LjUxOTgwMS03LjgxODY4IDcuMDUzNTQ5LTguMDkzNjQ5QzYuNTM5NDc3LTguNDE2NDM4IDYuMDI1NDA1LTguNDE2NDM4IDUuODQ2MDc3LTguNDE2NDM4QzMuMjg3NjcxLTguNDE2NDM4IC41OTc3NTgtNS44MTAyMTIgLjU5Nzc1OC0yLjk4ODc5MkMuNTk3NzU4LTEuMDE2MTg5IDEuOTYwNjQ4IC4yNTEwNTkgMy43NTM5MjMgLjI1MTA1OUM0LjYxNDY5NSAuMjUxMDU5IDUuNzAyNjE1LS4wMzU4NjYgNi4zMDAzNzQtLjc4OTA0MUM2LjQzMTg4LS4zMzQ3NDUgNi42OTQ4OTQtLjAxMTk1NSA2Ljc3ODU4LS4wMTE5NTVDNi44MzgzNTYtLjAxMTk1NSA2Ljg1MDMxMS0uMDQ3ODIxIDYuODYyMjY3LS4wNDc4MjFDNi44NzQyMjItLjA3MTczMSA2Ljk2OTg2My0uNDkwMTYyIDcuMDI5NjM5LS43MDUzNTVMNy4yMjA5MjItMS40NzA0ODZDNy4zMTY1NjMtMS44NjUwMDYgNy4zNjQzODQtMi4wMzIzNzkgNy40NDgwNy0yLjM5MTAzNEM3LjU2NzYyMS0yLjg0NTMzIDcuNTkxNTMyLTIuODgxMTk2IDguMjQ5MDY2LTIuODkzMTUxQzguMjk2ODg3LTIuODkzMTUxIDguNDQwMzQ5LTIuODkzMTUxIDguNDQwMzQ5LTMuMTIwMjk5QzguNDQwMzQ5LTMuMjM5ODUxIDguMzIwNzk3LTMuMjM5ODUxIDguMjg0OTMyLTMuMjM5ODUxQzguMDgxNjk0LTMuMjM5ODUxIDcuODU0NTQ1LTMuMjE1OTQgNy42MzkzNTItMy4yMTU5NEg2Ljk5Mzc3M0M2LjQ5MTY1Ni0zLjIxNTk0IDUuOTY1NjI5LTMuMjM5ODUxIDUuNDc1NDY3LTMuMjM5ODUxQzUuMzY3ODctMy4yMzk4NTEgNS4yMjQ0MDgtMy4yMzk4NTEgNS4yMjQ0MDgtMy4wMjQ2NThDNS4yMjQ0MDgtMi45MDUxMDYgNS4zMjAwNS0yLjkwNTEwNiA1LjMyMDA1LTIuODkzMTUxSDUuNjE4OTI5QzYuNTYzMzg3LTIuODkzMTUxIDYuNTYzMzg3LTIuNzk3NTA5IDYuNTYzMzg3LTIuNjE4MTgyQzYuNTYzMzg3LTIuNjA2MjI3IDYuMzM2MjM5LTEuMzk4NzU1IDYuMTA5MDkxLTEuMDQwMUM1LjY1NDc5NS0uMzcwNjEgNC43MTAzMzYtLjA5NTY0MSA0LjAwNDk4MS0uMDk1NjQxQzMuMDg0NDMzLS4wOTU2NDEgMS41OTAwMzctLjU3Mzg0OCAxLjU5MDAzNy0yLjY0MjA5MkMxLjU5MDAzNy0zLjQ0MzA4OCAxLjg3Njk2MS01LjI3MjIyOSAzLjAzNjYxMy02LjYyMzE2M0MzLjc4OTc4OC03LjQ4MzkzNSA0LjkwMTYxOS04LjA2OTczOCA1Ljk1MzY3NC04LjA2OTczOEM3LjM2NDM4NC04LjA2OTczOCA3Ljg2NjUwMS02Ljg2MjI2NyA3Ljg2NjUwMS01Ljc2MjM5MUM3Ljg2NjUwMS01LjU3MTEwOCA3LjgxODY4LTUuMzA4MDk1IDcuODE4NjgtNS4xNDA3MjJDNy44MTg2OC01LjAzMzEyNiA3LjkzODIzMi01LjAzMzEyNiA3Ljk3NDA5Ny01LjAzMzEyNkM4LjEwNTYwNC01LjAzMzEyNiA4LjExNzU1OS01LjA0NTA4MSA4LjE2NTM4LTUuMjYwMjc0TDguOTE4NTU1LTguMzA4ODQyWicvPgo8cGF0aCBpZD0nZzMtODMnIGQ9J003LjU5MTUzMi04LjMwODg0MkM3LjU5MTUzMi04LjQxNjQzOCA3LjUwNzg0Ni04LjQxNjQzOCA3LjQ4MzkzNS04LjQxNjQzOEM3LjQzNjExNS04LjQxNjQzOCA3LjQyNDE1OS04LjQwNDQ4MyA3LjI4MDY5Ny04LjIyNTE1NkM3LjIwODk2Ni04LjE0MTQ2OSA2LjcxODgwNC03LjUxOTgwMSA2LjcwNjg0OS03LjUwNzg0NkM2LjMxMjMyOS04LjI4NDkzMiA1LjUyMzI4OC04LjQxNjQzOCA1LjAyMTE3MS04LjQxNjQzOEMzLjUwMjg2NC04LjQxNjQzOCAyLjEyODAyLTcuMDI5NjM5IDIuMTI4MDItNS42Nzg3MDVDMi4xMjgwMi00Ljc4MjA2NyAyLjY2NjAwMi00LjI1NjA0IDMuMjUxODA2LTQuMDUyODAyQzMuMzgzMzEzLTQuMDA0OTgxIDQuMDg4NjY3LTMuODEzNjk5IDQuNDQ3MzIzLTMuNzMwMDEyQzUuMDU3MDM2LTMuNTYyNjQgNS4yMTI0NTMtMy41MTQ4MTkgNS40NjM1MTItMy4yNTE4MDZDNS41MTEzMzMtMy4xOTIwMyA1Ljc1MDQzNi0yLjkxNzA2MSA1Ljc1MDQzNi0yLjM1NTE2OEM1Ljc1MDQzNi0xLjI0MzMzNyA0LjcyMjI5MS0uMDk1NjQxIDMuNTI2Nzc1LS4wOTU2NDFDMi41NDY0NTEtLjA5NTY0MSAxLjQ1ODUzMS0uNTE0MDcyIDEuNDU4NTMxLTEuODUzMDUxQzEuNDU4NTMxLTIuMDgwMTk5IDEuNTA2MzUxLTIuMzY3MTIzIDEuNTQyMjE3LTIuNDg2Njc1QzEuNTQyMjE3LTIuNTIyNTQgMS41NTQxNzItMi41ODIzMTYgMS41NTQxNzItMi42MDYyMjdDMS41NTQxNzItMi42NTQwNDcgMS41MzAyNjItMi43MTM4MjMgMS40MzQ2Mi0yLjcxMzgyM0MxLjMyNzAyNC0yLjcxMzgyMyAxLjMxNTA2OC0yLjY4OTkxMyAxLjI2NzI0OC0yLjQ4NjY3NUwuNjU3NTM0LS4wMzU4NjZDLjY1NzUzNC0uMDIzOTEgLjYwOTcxNCAuMTMxNTA3IC42MDk3MTQgLjE0MzQ2MkMuNjA5NzE0IC4yNTEwNTkgLjcwNTM1NSAuMjUxMDU5IC43MjkyNjUgLjI1MTA1OUMuNzc3MDg2IC4yNTEwNTkgLjc4OTA0MSAuMjM5MTAzIC45MzI1MDMgLjA1OTc3NkwxLjQ4MjQ0MS0uNjU3NTM0QzEuNzY5MzY1LS4yMjcxNDggMi4zOTEwMzQgLjI1MTA1OSAzLjUwMjg2NCAuMjUxMDU5QzUuMDQ1MDgxIC4yNTEwNTkgNi40NTU3OTEtMS4yNDMzMzcgNi40NTU3OTEtMi43Mzc3MzNDNi40NTU3OTEtMy4yMzk4NTEgNi4zMzYyMzktMy42ODIxOTIgNS44ODE5NDMtNC4xMjQ1MzNDNS42MzA4ODQtNC4zNzU1OTIgNS40MTU2OTEtNC40MzUzNjcgNC4zMTU4MTYtNC43MjIyOTFDMy41MTQ4MTktNC45Mzc0ODQgMy40MDcyMjMtNC45NzMzNSAzLjE5MjAzLTUuMTY0NjMzQzIuOTg4NzkyLTUuMzY3ODcgMi44MzMzNzUtNS42NTQ3OTUgMi44MzMzNzUtNi4wNjEyN0MyLjgzMzM3NS03LjA2NTUwNCAzLjg0OTU2NC04LjA5MzY0OSA0Ljk4NTMwNS04LjA5MzY0OUM2LjE1NjkxMi04LjA5MzY0OSA2LjcwNjg0OS03LjM3NjMzOSA2LjcwNjg0OS02LjI0MDU5OEM2LjcwNjg0OS01LjkyOTc2MyA2LjY0NzA3My01LjYwNjk3NCA2LjY0NzA3My01LjU1OTE1M0M2LjY0NzA3My01LjQ1MTU1NyA2Ljc0MjcxNS01LjQ1MTU1NyA2Ljc3ODU4LTUuNDUxNTU3QzYuODg2MTc3LTUuNDUxNTU3IDYuODk4MTMyLTUuNDg3NDIyIDYuOTQ1OTUzLTUuNjc4NzA1TDcuNTkxNTMyLTguMzA4ODQyWicvPgo8cGF0aCBpZD0nZzMtMTA3JyBkPSdNMy4zNTk0MDItNy45OTgwMDdDMy4zNzEzNTctOC4wNDU4MjggMy4zOTUyNjgtOC4xMTc1NTkgMy4zOTUyNjgtOC4xNzczMzVDMy4zOTUyNjgtOC4yOTY4ODcgMy4yNzU3MTYtOC4yOTY4ODcgMy4yNTE4MDYtOC4yOTY4ODdDMy4yMzk4NTEtOC4yOTY4ODcgMi44MDk0NjUtOC4yNjEwMjEgMi41OTQyNzEtOC4yMzcxMTFDMi4zOTEwMzQtOC4yMjUxNTYgMi4yMTE3MDYtOC4yMDEyNDUgMS45OTY1MTMtOC4xODkyOUMxLjcwOTU4OS04LjE2NTM4IDEuNjI1OTAzLTguMTUzNDI1IDEuNjI1OTAzLTcuOTM4MjMyQzEuNjI1OTAzLTcuODE4NjggMS43NDU0NTUtNy44MTg2OCAxLjg2NTAwNi03LjgxODY4QzIuNDc0NzItNy44MTg2OCAyLjQ3NDcyLTcuNzExMDgzIDIuNDc0NzItNy41OTE1MzJDMi40NzQ3Mi03LjU0MzcxMSAyLjQ3NDcyLTcuNTE5ODAxIDIuNDE0OTQ0LTcuMzA0NjA4TC43MDUzNTUtLjQ2NjI1MkMuNjU3NTM0LS4yODY5MjQgLjY1NzUzNC0uMjYzMDE0IC42NTc1MzQtLjE5MTI4M0MuNjU3NTM0IC4wNzE3MzEgLjg2MDc3MiAuMTE5NTUyIC45ODAzMjQgLjExOTU1MkMxLjMxNTA2OCAuMTE5NTUyIDEuMzg2OC0uMTQzNDYyIDEuNDgyNDQxLS41MTQwNzJMMi4wNDQzMzQtMi43NDk2ODlDMi45MDUxMDYtMi42NTQwNDcgMy40MTkxNzgtMi4yOTUzOTIgMy40MTkxNzgtMS43MjE1NDRDMy40MTkxNzgtMS42NDk4MTMgMy40MTkxNzgtMS42MDE5OTMgMy4zODMzMTMtMS40MjI2NjVDMy4zMzU0OTItMS4yNDMzMzcgMy4zMzU0OTItMS4wOTk4NzUgMy4zMzU0OTItMS4wNDAxQzMuMzM1NDkyLS4zNDY3IDMuNzg5Nzg4IC4xMTk1NTIgNC4zOTk1MDIgLjExOTU1MkM0Ljk0OTQ0IC4xMTk1NTIgNS4yMzYzNjQtLjM4MjU2NSA1LjMzMjAwNS0uNTQ5OTM4QzUuNTgzMDY0LS45OTIyNzkgNS43Mzg0ODEtMS42NjE3NjggNS43Mzg0ODEtMS43MDk1ODlDNS43Mzg0ODEtMS43NjkzNjUgNS42OTA2Ni0xLjgxNzE4NiA1LjYxODkyOS0xLjgxNzE4NkM1LjUxMTMzMy0xLjgxNzE4NiA1LjQ5OTM3Ny0xLjc2OTM2NSA1LjQ1MTU1Ny0xLjU3ODA4MkM1LjI4NDE4NC0uOTU2NDEzIDUuMDMzMTI2LS4xMTk1NTIgNC40MjM0MTItLjExOTU1MkM0LjE4NDMwOS0uMTE5NTUyIDQuMDI4ODkyLS4yMzkxMDMgNC4wMjg4OTItLjY5MzRDNC4wMjg4OTItLjkyMDU0OCA0LjA3NjcxMi0xLjE4MzU2MiA0LjEyNDUzMy0xLjM2Mjg4OUM0LjE3MjM1NC0xLjU3ODA4MiA0LjE3MjM1NC0xLjU5MDAzNyA0LjE3MjM1NC0xLjczMzQ5OUM0LjE3MjM1NC0yLjQzODg1NCAzLjUzODczLTIuODMzMzc1IDIuNDM4ODU0LTIuOTc2ODM3QzIuODY5MjQtMy4yMzk4NTEgMy4yOTk2MjYtMy43MDYxMDIgMy40NjY5OTktMy44ODU0M0M0LjE0ODQ0My00LjY1MDU2IDQuNjE0Njk1LTUuMDMzMTI2IDUuMTY0NjMzLTUuMDMzMTI2QzUuNDM5NjAxLTUuMDMzMTI2IDUuNTExMzMzLTQuOTYxMzk1IDUuNTk1MDE5LTQuODg5NjY0QzUuMTUyNjc3LTQuODQxODQzIDQuOTg1MzA1LTQuNTMxMDA5IDQuOTg1MzA1LTQuMjkxOTA1QzQuOTg1MzA1LTQuMDA0OTgxIDUuMjEyNDUzLTMuOTA5MzQgNS4zNzk4MjYtMy45MDkzNEM1LjcwMjYxNS0zLjkwOTM0IDUuOTg5NTM5LTQuMTg0MzA5IDUuOTg5NTM5LTQuNTY2ODc0QzUuOTg5NTM5LTQuOTEzNTc0IDUuNzE0NTctNS4yNzIyMjkgNS4xNzY1ODgtNS4yNzIyMjlDNC41MTkwNTQtNS4yNzIyMjkgMy45ODEwNzEtNC44MDU5NzggMy4xMzIyNTQtMy44NDk1NjRDMy4wMTI3MDItMy43MDYxMDIgMi41NzAzNjEtMy4yNTE4MDYgMi4xMjgwMi0zLjA4NDQzM0wzLjM1OTQwMi03Ljk5ODAwN1onLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzM4LjYxNzM3NycgeT0nLTEzLjUxNjExOCcgeGxpbms6aHJlZj0nI2czLTcxJy8+Cjx1c2UgeD0nNTEuMTcxODI5JyB5PSctMTMuNTE2MTE4JyB4bGluazpocmVmPScjZzUtNjEnLz4KPHVzZSB4PSc2My41OTczMScgeT0nLTEzLjUxNjExOCcgeGxpbms6aHJlZj0nI2czLTcwJy8+Cjx1c2UgeD0nNzEuMTc1MDk1JyB5PSctMTEuNzIyODU0JyB4bGluazpocmVmPScjZzItMTE1Jy8+Cjx1c2UgeD0nNzguMjQ1ODA5JyB5PSctMTMuNTE2MTE4JyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzkwLjIwMDk2OScgeT0nLTEzLjUxNjExOCcgeGxpbms6aHJlZj0nI2c1LTUxJy8+Cjx1c2UgeD0nOTYuMDUzOTU5JyB5PSctMTMuNTE2MTE4JyB4bGluazpocmVmPScjZzMtMTA3Jy8+Cjx1c2UgeD0nMTAyLjE0MjE4MicgeT0nLTExLjcyMjg1NCcgeGxpbms6aHJlZj0nI2cyLTExNScvPgo8dXNlIHg9JzEwNi41NTYyMzInIHk9Jy0zNS4zODc2NjcnIHhsaW5rOmhyZWY9JyNnMC0xMTUnLz4KPHJlY3QgeD0nMTE4LjUxMTQzMScgeT0nLTM1Ljg2NTg1NCcgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nMjMxLjQxNDE2NCcvPgo8dXNlIHg9JzEyNC4xMjE2MTgnIHk9Jy0yMS42MDM4NzYnIHhsaW5rOmhyZWY9JyNnMy0yNScvPgo8dXNlIHg9JzEzMS4xOTA4ODgnIHk9Jy0yMS42MDM4NzYnIHhsaW5rOmhyZWY9JyNnMy04MycvPgo8dXNlIHg9JzEzOC4zOTAyMjgnIHk9Jy0xOS44MTA2MTMnIHhsaW5rOmhyZWY9JyNnNC00OCcvPgo8cmVjdCB4PScxMTkuNzA2OTQ1JyB5PSctMTYuNzQ0MDAzJyBoZWlnaHQ9Jy40NzgxODcnIHdpZHRoPScyNy44MzAyNjgnLz4KPHVzZSB4PScxMTkuNzA2OTQ1JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnNS01MicvPgo8dXNlIHg9JzEyNS41NTk5MzUnIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2czLTE2Jy8+Cjx1c2UgeD0nMTMwLjY3MjY1OScgeT0nLTMuNTIyMTkyJyB4bGluazpocmVmPScjZzItMTE1Jy8+Cjx1c2UgeD0nMTM1LjA4NjcwOScgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzMtMzMnLz4KPHVzZSB4PScxNDIuODA0OTA5JyB5PSctOC43NjkxNjMnIHhsaW5rOmhyZWY9JyNnNC01MScvPgo8dXNlIHg9JzE0Mi4zNzU5NicgeT0nLTIuMzU5OTQnIHhsaW5rOmhyZWY9JyNnMi0xMTUnLz4KPHVzZSB4PScxNTAuNzI1MjI0JyB5PSctMzAuMzczMDU1JyB4bGluazpocmVmPScjZzAtMjAnLz4KPHVzZSB4PScxOTkuMzc0OTg2JyB5PSctMjEuNjAzODc2JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PScyMDQuNDg3NzExJyB5PSctMTkuODEwNjEzJyB4bGluazpocmVmPScjZzItOTcnLz4KPHVzZSB4PScyMDkuNDgzODUyJyB5PSctMjEuNjAzODc2JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PScyMTQuNTk2NTc3JyB5PSctMTkuODEwNjEzJyB4bGluazpocmVmPScjZzItMTE1Jy8+CjxyZWN0IHg9JzE1OC4yMzA0MzUnIHk9Jy0xNi43NDQwMDMnIGhlaWdodD0nLjQ3ODE4Nycgd2lkdGg9JzEwMS45MjQ3MjgnLz4KPHVzZSB4PScxNTguMjMwNDM1JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnMy0xNicvPgo8dXNlIHg9JzE2My4zNDMxNTknIHk9Jy0zLjUyMjE5MicgeGxpbms6aHJlZj0nI2cyLTExMicvPgo8dXNlIHg9JzE2OC4xMDQwNjknIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2czLTE2Jy8+Cjx1c2UgeD0nMTczLjIxNjc5MycgeT0nLTMuNTIyMTkyJyB4bGluazpocmVmPScjZzItMTE1Jy8+Cjx1c2UgeD0nMTc3LjYzMDg0MycgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzUtNDAnLz4KPHVzZSB4PScxODIuMTgzMTY5JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnNS01MicvPgo8dXNlIHg9JzE4OC4wMzYxNTknIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2czLTE2Jy8+Cjx1c2UgeD0nMTk0LjA1MTc2MycgeT0nLTguNzY5MTYzJyB4bGluazpocmVmPScjZzQtNTAnLz4KPHVzZSB4PScxOTMuMTQ4ODg0JyB5PSctMi4zNTk5NCcgeGxpbms6aHJlZj0nI2cyLTk3Jy8+Cjx1c2UgeD0nMjAxLjQ0MDc0MScgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzUtNDMnLz4KPHVzZSB4PScyMTMuMjAyMDU2JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnMy0xOCcvPgo8dXNlIHg9JzIxOC45ODIzOTcnIHk9Jy04Ljc2OTE2MycgeGxpbms6aHJlZj0nI2c0LTUwJy8+Cjx1c2UgeD0nMjIzLjcxNDcxMicgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzUtNDEnLz4KPHVzZSB4PScyMzAuOTIzNzAxJyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnNS00MycvPgo8dXNlIHg9JzI0Mi42ODUwMTYnIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2czLTEzJy8+Cjx1c2UgeD0nMjQ5LjQwNzI0NScgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PScyNTUuNDIyODQ4JyB5PSctOC43NjkxNjMnIHhsaW5rOmhyZWY9JyNnNC01MCcvPgo8dXNlIHg9JzI1NC41MTk5NjknIHk9Jy0yLjM1OTk0JyB4bGluazpocmVmPScjZzItOTcnLz4KPHVzZSB4PScyNjIuNTQ2MTkxJyB5PSctMjIuNjgzODI2JyB4bGluazpocmVmPScjZzUtNDAnLz4KPHVzZSB4PScyNjcuMDk4NTE2JyB5PSctMjIuNjgzODI2JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PScyNzIuMjExMjQxJyB5PSctMjAuODkwNTYzJyB4bGluazpocmVmPScjZzItMTEyJy8+Cjx1c2UgeD0nMjc2Ljk3MjE1JyB5PSctMjIuNjgzODI2JyB4bGluazpocmVmPScjZzMtMzMnLz4KPHVzZSB4PScyODQuNjkwMzUnIHk9Jy0yNi4xMzc1MzQnIHhsaW5rOmhyZWY9JyNnNC01MScvPgo8dXNlIHg9JzI4NC4yNjE0MDEnIHk9Jy0xOS43MjgzMTEnIHhsaW5rOmhyZWY9JyNnMi0xMTInLz4KPHVzZSB4PScyOTIuMDc5MzI4JyB5PSctMjIuNjgzODI2JyB4bGluazpocmVmPScjZzUtNDMnLz4KPHVzZSB4PSczMDMuODQwNjQzJyB5PSctMjIuNjgzODI2JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PSczMDguOTUzMzY3JyB5PSctMjAuODkwNTYzJyB4bGluazpocmVmPScjZzItMTE1Jy8+Cjx1c2UgeD0nMzEzLjM2NzQxOCcgeT0nLTIyLjY4MzgyNicgeGxpbms6aHJlZj0nI2czLTMzJy8+Cjx1c2UgeD0nMzIxLjA4NTYxNycgeT0nLTI2LjEzNzUzNCcgeGxpbms6aHJlZj0nI2c0LTUxJy8+Cjx1c2UgeD0nMzIwLjY1NjY2OCcgeT0nLTE5LjcyODMxMScgeGxpbms6aHJlZj0nI2cyLTExNScvPgo8dXNlIHg9JzMyNS44MTc5MzInIHk9Jy0yMi42ODM4MjYnIHhsaW5rOmhyZWY9JyNnNS00MScvPgo8dXNlIHg9JzMzMC4zNzAyNTgnIHk9Jy0yMi42ODM4MjYnIHhsaW5rOmhyZWY9JyNnMy0zMycvPgo8dXNlIHg9JzMzNy42NTk1MDknIHk9Jy0yMC44OTA1NjMnIHhsaW5rOmhyZWY9JyNnMi0xMTInLz4KPHJlY3QgeD0nMjYyLjU0NjE5MScgeT0nLTE2Ljc0NDAwMycgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nNzkuODc0MTkzJy8+Cjx1c2UgeD0nMjg4LjI3NzEwOCcgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzUtNTInLz4KPHVzZSB4PScyOTQuMTMwMDk4JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnMy0xNicvPgo8dXNlIHg9JzI5OS4yNDI4MjInIHk9Jy0zLjUyMjE5MicgeGxpbms6aHJlZj0nI2cyLTk3Jy8+Cjx1c2UgeD0nMzA0LjIzODk2NCcgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzMtMzMnLz4KPHVzZSB4PSczMTEuOTU3MTYzJyB5PSctOC43NjkxNjMnIHhsaW5rOmhyZWY9JyNnNC01MicvPgo8dXNlIHg9JzMxMS41MjgyMTUnIHk9Jy0yLjM1OTk0JyB4bGluazpocmVmPScjZzItOTcnLz4KPHVzZSB4PSczNDMuNjE1ODk3JyB5PSctMzAuMzczMDU1JyB4bGluazpocmVmPScjZzAtMjEnLz4KPC9nPgo8L3N2Zz4KPCEtLSBERVBUSD0wIC0tPg==)
The natural frequency of the first oscillator is equal to:

The natural frequency of the secondary oscillator is equal to:

The average natural frequency of the system is equal to:

The average damping ratio of the system is equal to:

The mass ratio is equal to:

The tuning parameter of the system is equal to:

Eight uncertainties are considered in the system:
on the masses of the primary and secondary systems (
 and
and  ),
),on the spring stiffeness of the primary and secondary oscillators (
 and
and  ),
),on the damping ratios of the primary and secondary systems (
 and
and  ),
),on the loading capacity of the secondary spring (
 ),
),on the intensity of the white noise excitation (
 ).
).
We consider the following distribution fResponse of Two-Degree-of-Freedom Systems to White-Noise Base Excitation:








The failure probability is:

The value of  is:
is:

References¶
Der Kiureghian, A. and De Stefano, M. (1991). Efficient Algorithm for Second-Order Reliability Analysis, Journal of engineering mechanics, 117(12), 2904-2923
Dubourg, V., Sudret, B., Deheeger, F. (2013). Metamodel-based importance sampling for structural reliability analysis. Probabilistic Engineering Mechanics, 33, pp. 47–57
API documentation¶
- class Oscillator
Data class for the oscillator example.
Examples
>>> from openturns.usecases import oscillator >>> # Load the oscillator >>> osc = oscillator.Oscillator()
- Attributes:
- dimint
dim = 8, dimension of the problem
- model
SymbolicFunction The limit state function
- muMpfloat
muMp = 1.5, mean of the mass of the primary system
- sigmaOverMuMpfloat
sigmaOverMuMp = 0.1, coefficient of variation of the mass of the primary system
- distributionMp
LogNormaldistribution of the mass of the primary system distributionMp = ot.LogNormalMuSigmaOverMu(muMp, sigmaOverMuMp).getDistribution()
- muMsfloat
muMs = 0.01, mean of the mass of the primary system
- sigmaOverMuMsfloat
sigmaOverMuMs = 0.1, coefficient of variation of the mass of the primary system
- distributionMs
LogNormaldistribution of the mass of the secondary system distributionMs = ot.LogNormalMuSigmaOverMu(muMs, sigmaOverMuMs).getDistribution()
- muKpfloat
muKp = 1, mean of the spring stiffness of the primary system
- sigmaOverMuKpfloat
sigmaOverMuKp = 0.2, coefficient of variation of the spring stiffness of the primary system
- distributionKp
LogNormaldistribution of the spring stiffness of the primary system distributionKp = ot.LogNormalMuSigmaOverMu(muKp, sigmaOverMuKp).getDistribution()
- muKsfloat
muKs = 0.01, mean of the spring stiffness of the secondary system
- sigmaOverMuKsfloat
sigmaOverMuKs = 0.2, coefficient of variation of the spring stiffness of the secondary system
- distributionKs
LogNormaldistribution of the spring stiffness of the secondary system distributionKs = ot.LogNormalMuSigmaOverMu(muKs, sigmaOverMuKs).getDistribution()
- muZetapfloat
muZetap = 0.05, mean of the damping ratio of the primary system
- sigmaOverMuZetapfloat
sigmaOverMuZetap = 0.4, coefficient of variation of the damping ratio of the primary system
- distributionZetap
LogNormaldistribution of the damping ratio of the primary system distributionZetap = ot.LogNormalMuSigmaOverMu(muZetap, sigmaOverMuZetap).getDistribution()
- muZetasfloat
muZetas = 0.02, mean of the damping ratio of the secondary system
- sigmaOverMuZetasfloat
sigmaOverMuZetas = 0.5, coefficient of variation of the damping ratio of the secondary system
- distributionZetas
LogNormaldistribution of the damping ratio of the secondary system distributionZetas = ot.LogNormalMuSigmaOverMu(muZetas, sigmaOverMuZetas).getDistribution()
- muFsfloat
muFs = 27.5, mean of the loading capacity of the secondary spring
- sigmaOverFsfloat
sigmaOverFs = 0.1, coefficient of variation of the loading capacity of the secondary spring
- distributionFs
LogNormaldistribution of the loading capacity of the secondary spring distributionFs = ot.LogNormalMuSigmaOverMu(muFs, sigmaOverFs).getDistribution()
- muS0float
muS0 = 100, mean of the intensity of the white noise
- sigmaOverS0float
sigmaOverS0 = 0.1, coefficient of variation of the intensity of the white noise
- distributionS0
LogNormaldistribution of the intensity of the white noise distributionS0 = ot.LogNormalMuSigmaOverMu(muS0, sigmaOverS0).getDistribution()
- distribution
JointDistribution The joint distribution of the input parameters
Examples based on this use case¶
Using the FORM - SORM algorithms on a nonlinear function