A two degree-of-fredom primary/secondary damped oscillator¶
We consider a two degree-of-fredom primary-secondary damped oscillator. This system is composed of a two-stage oscillator characterized by a mass, a stiffness and a damping ratio for each of the two oscillators. This system is submitted to a white-noise excitation. The limit-state function is highly nonlinear, mainly due to the interactions between the two stages of the system, and presents one failure zone.
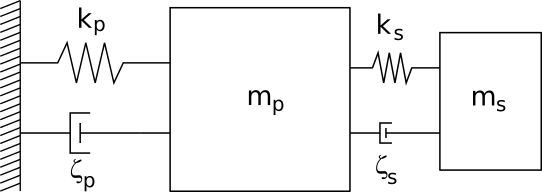
Two stage oscillator¶
The limit state function is defined as follows:
![G = F_s - 3 k_s \sqrt{\frac{\pi S_0}{4 \zeta_s \omega_s^3} \left[\frac{\zeta_a \zeta_s}{\zeta_p \zeta_s (4 \zeta_a^2 + \theta^2)+\gamma \zeta_a^2}\frac{(\zeta_p \omega_p^3 + \zeta_s \omega_s^3)\omega_p}{4 \zeta_a \omega_a^4}\right]}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuNC4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzMxMS4zMDgyMjZwdCcgaGVpZ2h0PSczNS44NjU4NjlwdCcgdmlld0JveD0nMzguNjE3Mzc3IC0zNS44NjU4NjIgMzExLjMwODIyNiAzNS44NjU4NjknPgo8ZGVmcz4KPHBhdGggaWQ9J2c0LTQ4JyBkPSdNMy44OTczODUtMi41NDI0NjZDMy44OTczODUtMy4zOTUyNjggMy44MDk3MTQtMy45MTMzMjUgMy41NDY3LTQuNDIzNDEyQzMuMTk2MDE1LTUuMTI0NzgyIDIuNTUwNDM2LTUuMzAwMTI1IDIuMTEyMDgtNS4zMDAxMjVDMS4xMDc4NDYtNS4zMDAxMjUgLjc0MTIyLTQuNTUwOTM0IC42Mjk2MzktNC4zMjc3NzFDLjM0MjcxNS0zLjc0NTk1MyAuMzI2Nzc1LTIuOTU2OTEyIC4zMjY3NzUtMi41NDI0NjZDLjMyNjc3NS0yLjAxNjQzOCAuMzUwNjg1LTEuMjExNDU3IC43MzMyNS0uNTczODQ4QzEuMDk5ODc1IC4wMTU5NCAxLjY4OTY2NCAuMTY3MzcyIDIuMTEyMDggLjE2NzM3MkMyLjQ5NDY0NSAuMTY3MzcyIDMuMTgwMDc1IC4wNDc4MjEgMy41Nzg1OC0uNzQxMjJDMy44NzM0NzQtMS4zMTUwNjggMy44OTczODUtMi4wMjQ0MDggMy44OTczODUtMi41NDI0NjZaTTIuMTEyMDgtLjA1NTc5MUMxLjg0MTA5Ni0uMDU1NzkxIDEuMjkxMTU4LS4xODMzMTMgMS4xMjM3ODYtMS4wMjAxNzRDMS4wMzYxMTUtMS40NzQ0NzEgMS4wMzYxMTUtMi4yMjM2NjEgMS4wMzYxMTUtMi42MzgxMDdDMS4wMzYxMTUtMy4xODgwNDUgMS4wMzYxMTUtMy43NDU5NTMgMS4xMjM3ODYtNC4xODQzMDlDMS4yOTExNTgtNC45OTcyNiAxLjkxMjgyNy01LjA3Njk2MSAyLjExMjA4LTUuMDc2OTYxQzIuMzgzMDY0LTUuMDc2OTYxIDIuOTMzMDAxLTQuOTQxNDY5IDMuMDkyNDAzLTQuMjE2MTg5QzMuMTg4MDQ1LTMuNzc3ODMzIDMuMTg4MDQ1LTMuMTgwMDc1IDMuMTg4MDQ1LTIuNjM4MTA3QzMuMTg4MDQ1LTIuMTY3ODcgMy4xODgwNDUtMS40NTA1NiAzLjA5MjQwMy0xLjAwNDIzNEMyLjkyNTAzMS0uMTY3MzcyIDIuMzc1MDkzLS4wNTU3OTEgMi4xMTIwOC0uMDU1NzkxWicvPgo8cGF0aCBpZD0nZzQtNTAnIGQ9J00yLjI0NzU3Mi0xLjYyNTkwM0MyLjM3NTA5My0xLjc0NTQ1NSAyLjcwOTgzOC0yLjAwODQ2OCAyLjgzNzM2LTIuMTIwMDVDMy4zMzE1MDctMi41NzQzNDYgMy44MDE3NDMtMy4wMTI3MDIgMy44MDE3NDMtMy43Mzc5ODNDMy44MDE3NDMtNC42ODY0MjYgMy4wMDQ3MzItNS4zMDAxMjUgMi4wMDg0NjgtNS4zMDAxMjVDMS4wNTIwNTUtNS4zMDAxMjUgLjQyMjQxNi00LjU3NDg0NCAuNDIyNDE2LTMuODY1NTA0Qy40MjI0MTYtMy40NzQ5NjkgLjczMzI1LTMuNDE5MTc4IC44NDQ4MzItMy40MTkxNzhDMS4wMTIyMDQtMy40MTkxNzggMS4yNTkyNzgtMy41Mzg3MyAxLjI1OTI3OC0zLjg0MTU5NEMxLjI1OTI3OC00LjI1NjA0IC44NjA3NzItNC4yNTYwNCAuNzY1MTMxLTQuMjU2MDRDLjk5NjI2NC00LjgzNzg1OCAxLjUzMDI2Mi01LjAzNzExMSAxLjkyMDc5Ny01LjAzNzExMUMyLjY2MjAxNy01LjAzNzExMSAzLjA0NDU4My00LjQwNzQ3MiAzLjA0NDU4My0zLjczNzk4M0MzLjA0NDU4My0yLjkwOTA5MSAyLjQ2Mjc2NS0yLjMwMzM2MiAxLjUyMjI5MS0xLjMzODk3OUwuNTE4MDU3LS4zMDI4NjRDLjQyMjQxNi0uMjE1MTkzIC40MjI0MTYtLjE5OTI1MyAuNDIyNDE2IDBIMy41NzA2MUwzLjgwMTc0My0xLjQyNjY1SDMuNTU0NjdDMy41MzA3Ni0xLjI2NzI0OCAzLjQ2Njk5OS0uODY4NzQyIDMuMzcxMzU3LS43MTczMUMzLjMyMzUzNy0uNjUzNTQ5IDIuNzE3ODA4LS42NTM1NDkgMi41OTAyODYtLjY1MzU0OUgxLjE3MTYwNkwyLjI0NzU3Mi0xLjYyNTkwM1onLz4KPHBhdGggaWQ9J2c0LTUxJyBkPSdNMi4wMTY0MzgtMi42NjIwMTdDMi42NDYwNzctMi42NjIwMTcgMy4wNDQ1ODMtMi4xOTk3NTEgMy4wNDQ1ODMtMS4zNjI4ODlDMy4wNDQ1ODMtLjM2NjYyNSAyLjQ3ODcwNS0uMDcxNzMxIDIuMDU2Mjg5LS4wNzE3MzFDMS42MTc5MzMtLjA3MTczMSAxLjAyMDE3NC0uMjMxMTMzIC43NDEyMi0uNjUzNTQ5QzEuMDI4MTQ0LS42NTM1NDkgMS4yMjczOTctLjgzNjg2MiAxLjIyNzM5Ny0xLjA5OTg3NUMxLjIyNzM5Ny0xLjM1NDkxOSAxLjA0NDA4NS0xLjUzODIzMiAuNzg5MDQxLTEuNTM4MjMyQy41NzM4NDgtMS41MzgyMzIgLjM1MDY4NS0xLjQwMjc0IC4zNTA2ODUtMS4wODM5MzVDLjM1MDY4NS0uMzI2Nzc1IDEuMTYzNjM2IC4xNjczNzIgMi4wNzIyMjkgLjE2NzM3MkMzLjEzMjI1NCAuMTY3MzcyIDMuODczNDc0LS41NjU4NzggMy44NzM0NzQtMS4zNjI4ODlDMy44NzM0NzQtMi4wMjQ0MDggMy4zNDc0NDctMi42MzAxMzcgMi41MzQ0OTYtMi44MDU0NzlDMy4xNjQxMzQtMy4wMjg2NDMgMy42MzQzNzEtMy41NzA2MSAzLjYzNDM3MS00LjIwODIxOVMyLjkxNzA2MS01LjMwMDEyNSAyLjA4ODE2OS01LjMwMDEyNUMxLjIzNTM2Ny01LjMwMDEyNSAuNTg5Nzg4LTQuODM3ODU4IC41ODk3ODgtNC4yMzIxM0MuNTg5Nzg4LTMuOTM3MjM1IC43ODkwNDEtMy44MDk3MTQgLjk5NjI2NC0zLjgwOTcxNEMxLjI0MzMzNy0zLjgwOTcxNCAxLjQwMjc0LTMuOTg1MDU2IDEuNDAyNzQtNC4yMTYxODlDMS40MDI3NC00LjUxMTA4MyAxLjE0NzY5Ni00LjYyMjY2NSAuOTcyMzU0LTQuNjMwNjM1QzEuMzA3MDk4LTUuMDY4OTkxIDEuOTIwNzk3LTUuMDkyOTAyIDIuMDY0MjU5LTUuMDkyOTAyQzIuMjcxNDgyLTUuMDkyOTAyIDIuODc3MjEtNS4wMjkxNDEgMi44NzcyMS00LjIwODIxOUMyLjg3NzIxLTMuNjUwMzExIDIuNjQ2MDc3LTMuMzE1NTY3IDIuNTM0NDk2LTMuMTg4MDQ1QzIuMjk1MzkyLTIuOTQwOTcxIDIuMTEyMDgtMi45MjUwMzEgMS42MjU5MDMtMi44OTMxNTFDMS40NzQ0NzEtMi44ODUxODEgMS40MTA3MS0yLjg3NzIxIDEuNDEwNzEtMi43NzM1OTlDMS40MTA3MS0yLjY2MjAxNyAxLjQ4MjQ0MS0yLjY2MjAxNyAxLjYxNzkzMy0yLjY2MjAxN0gyLjAxNjQzOFonLz4KPHBhdGggaWQ9J2c0LTUyJyBkPSdNMy4xNDAyMjQtNS4xNTY2NjNDMy4xNDAyMjQtNS4zMTYwNjUgMy4xNDAyMjQtNS4zNzk4MjYgMi45NzI4NTItNS4zNzk4MjZDMi44NjkyNC01LjM3OTgyNiAyLjg2MTI3LTUuMzcxODU2IDIuNzgxNTY5LTUuMjYwMjc0TC4yMzkxMDMtMS41NzAxMTJWLTEuMzA3MDk4SDIuNDg2Njc1Vi0uNjQ1NTc5QzIuNDg2Njc1LS4zNTA2ODUgMi40NjI3NjUtLjI2MzAxNCAxLjg0OTA2Ni0uMjYzMDE0SDEuNjY1NzUzVjBDMi4zNDMyMTMtLjAyMzkxIDIuMzU5MTUzLS4wMjM5MSAyLjgxMzQ1LS4wMjM5MVMzLjI4MzY4Ni0uMDIzOTEgMy45NjExNDYgMFYtLjI2MzAxNEgzLjc3NzgzM0MzLjE2NDEzNC0uMjYzMDE0IDMuMTQwMjI0LS4zNTA2ODUgMy4xNDAyMjQtLjY0NTU3OVYtMS4zMDcwOThIMy45ODUwNTZWLTEuNTcwMTEySDMuMTQwMjI0Vi01LjE1NjY2M1pNMi41NDI0NjYtNC41MTEwODNWLTEuNTcwMTEySC41MTgwNTdMMi41NDI0NjYtNC41MTEwODNaJy8+CjxwYXRoIGlkPSdnMC0yMCcgZD0nTTIuOTg4NzkyIDI4LjIwMjI0Mkg2LjEzMzAwMVYyNy41NDQ3MDdIMy42NDYzMjZWLjE3OTMyOEg2LjEzMzAwMVYtLjQ3ODIwN0gyLjk4ODc5MlYyOC4yMDIyNDJaJy8+CjxwYXRoIGlkPSdnMC0yMScgZD0nTTIuNjU0MDQ3IDI3LjU0NDcwN0guMTY3MzcyVjI4LjIwMjI0MkgzLjMxMTU4MlYtLjQ3ODIwN0guMTY3MzcyVi4xNzkzMjhIMi42NTQwNDdWMjcuNTQ0NzA3WicvPgo8cGF0aCBpZD0nZzAtMTE1JyBkPSdNMi45NzY4MzcgMTcuNDU0NTQ1TDEuMzk4NzU1IDIwLjU2Mjg4OUMxLjMzODk3OSAyMC42ODI0NDEgMS4zMjcwMjQgMjAuNzA2MzUxIDEuMzI3MDI0IDIwLjcxODMwNkMxLjMyNzAyNCAyMC43NjYxMjcgMS40ODI0NDEgMjAuODk3NjM0IDEuNDk0Mzk2IDIwLjkwOTU4OUwyLjMwNzM0NyAxOS4zMzE1MDdMNS4wNjg5OTEgMzUuMzg3Mjk4QzUuNDM5NjAxIDM1LjM4NzI5OCA1LjUxMTMzMyAzNS4zODcyOTggNS41NzExMDggMzUuMDc2NDYzTDEyLjE5NDI3MS0uMjM5MTAzQzEyLjE5NDI3MS0uMzcwNjEgMTIuMDk4NjMtLjQ3ODIwNyAxMS45NTUxNjgtLjQ3ODIwN0MxMS43NjM4ODUtLjQ3ODIwNyAxMS43MjgwMi0uMzIyNzkgMTEuNjkyMTU0LS4xMTk1NTJMNS41NzExMDggMzIuNDU4MjgxSDUuNTU5MTUzTDIuOTc2ODM3IDE3LjQ1NDU0NVonLz4KPHBhdGggaWQ9J2cyLTk3JyBkPSdNMy4xMjQyODQtMy4wMzY2MTNDMy4wNTI1NTMtMy4xNzIxMDUgMi44MjE0Mi0zLjUxNDgxOSAyLjMzNTI0My0zLjUxNDgxOUMxLjM4NjgtMy41MTQ4MTkgLjM0MjcxNS0yLjQwNjk3NCAuMzQyNzE1LTEuMjI3Mzk3Qy4zNDI3MTUtLjM5ODUwNiAuODc2NzEyIC4wNzk3MDEgMS40OTA0MTEgLjA3OTcwMUMyLjAwMDQ5OCAuMDc5NzAxIDIuNDM4ODU0LS4zMjY3NzUgMi41ODIzMTYtLjQ4NjE3N0MyLjcyNTc3OCAuMDYzNzYxIDMuMjY3NzQ2IC4wNzk3MDEgMy4zNjMzODcgLjA3OTcwMUMzLjczMDAxMiAuMDc5NzAxIDMuOTEzMzI1LS4yMjMxNjMgMy45NzcwODYtLjM1ODY1NUM0LjEzNjQ4OC0uNjQ1NTc5IDQuMjQ4MDctMS4xMDc4NDYgNC4yNDgwNy0xLjEzOTcyNkM0LjI0ODA3LTEuMTg3NTQ3IDQuMjE2MTg5LTEuMjQzMzM3IDQuMTIwNTQ4LTEuMjQzMzM3UzQuMDA4OTY2LTEuMTk1NTE3IDMuOTYxMTQ2LS45OTYyNjRDMy44NDk1NjQtLjU1NzkwOCAzLjY5ODEzMi0uMTQzNDYyIDMuMzg3Mjk4LS4xNDM0NjJDMy4yMDM5ODUtLjE0MzQ2MiAzLjEzMjI1NC0uMjk0ODk0IDMuMTMyMjU0LS41MTgwNTdDMy4xMzIyNTQtLjY1MzU0OSAzLjIwMzk4NS0uOTI0NTMzIDMuMjUxODA2LTEuMTIzNzg2UzMuNDE5MTc4LTEuODAxMjQ1IDMuNDUxMDU5LTEuOTQ0NzA3TDMuNjEwNDYxLTIuNTUwNDM2QzMuNjUwMzExLTIuNzQxNzE5IDMuNzM3OTgzLTMuMDc2NDYzIDMuNzM3OTgzLTMuMTE2MzE0QzMuNzM3OTgzLTMuMjk5NjI2IDMuNTg2NTUtMy4zNjMzODcgMy40ODI5MzktMy4zNjMzODdDMy4zNjMzODctMy4zNjMzODcgMy4xNjQxMzQtMy4yODM2ODYgMy4xMjQyODQtMy4wMzY2MTNaTTIuNTgyMzE2LS44NjA3NzJDMi4xODM4MTEtLjMxMDgzNCAxLjc2OTM2NS0uMTQzNDYyIDEuNTE0MzIxLS4xNDM0NjJDMS4xNDc2OTYtLjE0MzQ2MiAuOTY0Mzg0LS40NzgyMDcgLjk2NDM4NC0uODkyNjUzQy45NjQzODQtMS4yNjcyNDggMS4xNzk1NzctMi4xMjAwNSAxLjM1NDkxOS0yLjQ3MDczNUMxLjU4NjA1Mi0yLjk1NjkxMiAxLjk3NjU4OC0zLjI5MTY1NiAyLjM0MzIxMy0zLjI5MTY1NkMyLjg2MTI3LTMuMjkxNjU2IDMuMDEyNzAyLTIuNzA5ODM4IDMuMDEyNzAyLTIuNjE0MTk3QzMuMDEyNzAyLTIuNTgyMzE2IDIuODEzNDUtMS44MDEyNDUgMi43NjU2MjktMS41OTQwMjJDMi42NjIwMTctMS4yMTk0MjcgMi42NjIwMTctMS4yMDM0ODcgMi41ODIzMTYtLjg2MDc3MlonLz4KPHBhdGggaWQ9J2cyLTExMicgZD0nTS40MTQ0NDYgLjk2NDM4NEMuMzUwNjg1IDEuMjE5NDI3IC4zMzQ3NDUgMS4yODMxODggLjAxNTk0IDEuMjgzMTg4Qy0uMDk1NjQxIDEuMjgzMTg4LS4xOTEyODMgMS4yODMxODgtLjE5MTI4MyAxLjQzNDYyQy0uMTkxMjgzIDEuNTA2MzUxLS4xMTk1NTIgMS41NDYyMDItLjA3OTcwMSAxLjU0NjIwMkMwIDEuNTQ2MjAyIC4wMzE4OCAxLjUyMjI5MSAuNjIxNjY5IDEuNTIyMjkxQzEuMTk1NTE3IDEuNTIyMjkxIDEuMzYyODg5IDEuNTQ2MjAyIDEuNDE4NjggMS41NDYyMDJDMS40NTA1NiAxLjU0NjIwMiAxLjU3MDExMiAxLjU0NjIwMiAxLjU3MDExMiAxLjM5NDc3QzEuNTcwMTEyIDEuMjgzMTg4IDEuNDU4NTMxIDEuMjgzMTg4IDEuMzYyODg5IDEuMjgzMTg4Qy45ODAzMjQgMS4yODMxODggLjk4MDMyNCAxLjIzNTM2NyAuOTgwMzI0IDEuMTYzNjM2Qy45ODAzMjQgMS4xMDc4NDYgMS4xMjM3ODYgLjU0MTk2OCAxLjM2Mjg4OS0uMzkwNTM1QzEuNDY2NTAxLS4yMDcyMjMgMS43MTM1NzQgLjA3OTcwMSAyLjE0Mzk2IC4wNzk3MDFDMy4xMjQyODQgLjA3OTcwMSA0LjE0NDQ1OC0xLjA1MjA1NSA0LjE0NDQ1OC0yLjIwNzcyMUM0LjE0NDQ1OC0yLjk5Njc2MiAzLjYzNDM3MS0zLjUxNDgxOSAyLjk5Njc2Mi0zLjUxNDgxOUMyLjUxODU1NS0zLjUxNDgxOSAyLjEzNTk5LTMuMTg4MDQ1IDEuOTA0ODU3LTIuOTQ4OTQxQzEuNzM3NDg0LTMuNTE0ODE5IDEuMjAzNDg3LTMuNTE0ODE5IDEuMTIzNzg2LTMuNTE0ODE5Qy44MzY4NjItMy41MTQ4MTkgLjYzNzYwOS0zLjMzMTUwNyAuNTEwMDg3LTMuMDg0NDMzQy4zMjY3NzUtMi43MjU3NzggLjIzOTEwMy0yLjMxOTMwMyAuMjM5MTAzLTIuMjk1MzkyQy4yMzkxMDMtMi4yMjM2NjEgLjI5NDg5NC0yLjE5MTc4MSAuMzU4NjU1LTIuMTkxNzgxQy40NjIyNjctMi4xOTE3ODEgLjQ3MDIzNy0yLjIyMzY2MSAuNTI2MDI3LTIuNDMwODg0Qy42Mjk2MzktMi44MzczNiAuNzczMTAxLTMuMjkxNjU2IDEuMDk5ODc1LTMuMjkxNjU2QzEuMjk5MTI4LTMuMjkxNjU2IDEuMzU0OTE5LTMuMTA4MzQ0IDEuMzU0OTE5LTIuOTE3MDYxQzEuMzU0OTE5LTIuODM3MzYgMS4zMjMwMzktMi42NDYwNzcgMS4zMDcwOTgtMi41ODIzMTZMLjQxNDQ0NiAuOTY0Mzg0Wk0xLjg4MDk0Ni0yLjQ1NDc5NUMxLjkyMDc5Ny0yLjU5MDI4NiAxLjkyMDc5Ny0yLjYwNjIyNyAyLjA0MDM0OS0yLjc0OTY4OUMyLjM0MzIxMy0zLjEwODM0NCAyLjY4NTkyOC0zLjI5MTY1NiAyLjk3Mjg1Mi0zLjI5MTY1NkMzLjM3MTM1Ny0zLjI5MTY1NiAzLjUyMjc5LTIuOTAxMTIxIDMuNTIyNzktMi41NDI0NjZDMy41MjI3OS0yLjI0NzU3MiAzLjM0NzQ0Ny0xLjM5NDc3IDMuMTA4MzQ0LS45MjQ1MzNDMi45MDExMjEtLjQ5NDE0NyAyLjUxODU1NS0uMTQzNDYyIDIuMTQzOTYtLjE0MzQ2MkMxLjYwMTk5My0uMTQzNDYyIDEuNDc0NDcxLS43NjUxMzEgMS40NzQ0NzEtLjgyMDkyMkMxLjQ3NDQ3MS0uODM2ODYyIDEuNDkwNDExLS45MjQ1MzMgMS40OTgzODEtLjk0ODQ0M0wxLjg4MDk0Ni0yLjQ1NDc5NVonLz4KPHBhdGggaWQ9J2cyLTExNScgZD0nTTMuMjExOTU1LTIuOTk2NzYyQzMuMDI4NjQzLTIuOTY0ODgyIDIuODYxMjctMi44MjE0MiAyLjg2MTI3LTIuNjIyMTY3QzIuODYxMjctMi40Nzg3MDUgMi45NTY5MTItMi4zNzUwOTMgMy4xMzIyNTQtMi4zNzUwOTNDMy4yNTE4MDYtMi4zNzUwOTMgMy40OTg4NzktMi40NjI3NjUgMy40OTg4NzktMi44MjE0MkMzLjQ5ODg3OS0zLjMxNTU2NyAyLjk4MDgyMi0zLjUxNDgxOSAyLjQ4NjY3NS0zLjUxNDgxOUMxLjQxODY4LTMuNTE0ODE5IDEuMDgzOTM1LTIuNzU3NjU5IDEuMDgzOTM1LTIuMzUxMTgzQzEuMDgzOTM1LTIuMjcxNDgyIDEuMDgzOTM1LTEuOTg0NTU4IDEuMzc4ODI5LTEuNzYxMzk1QzEuNTYyMTQyLTEuNjE3OTMzIDEuNjk3NjM0LTEuNTk0MDIyIDIuMTEyMDgtMS41MTQzMjFDMi4zOTEwMzQtMS40NTg1MzEgMi44NDUzMy0xLjM3ODgyOSAyLjg0NTMzLS45NjQzODRDMi44NDUzMy0uNzU3MTYxIDIuNjkzODk4LS40OTQxNDcgMi40NzA3MzUtLjM0MjcxNUMyLjE3NTg0MS0uMTUxNDMyIDEuNzg1MzA1LS4xNDM0NjIgMS42NTc3ODMtLjE0MzQ2MkMxLjQ2NjUwMS0uMTQzNDYyIC45MjQ1MzMtLjE3NTM0MiAuNzI1MjgtLjQ5NDE0N0MxLjEzMTc1Ni0uNTEwMDg3IDEuMTg3NTQ3LS44MzY4NjIgMS4xODc1NDctLjkzMjUwM0MxLjE4NzU0Ny0xLjE3MTYwNiAuOTcyMzU0LTEuMjI3Mzk3IC44NzY3MTItMS4yMjczOTdDLjc0OTE5MS0xLjIyNzM5NyAuNDIyNDE2LTEuMTMxNzU2IC40MjI0MTYtLjY5MzRDLjQyMjQxNi0uMjIzMTYzIC45MTY1NjMgLjA3OTcwMSAxLjY1Nzc4MyAuMDc5NzAxQzMuMDQ0NTgzIC4wNzk3MDEgMy4zMzk0NzctLjkwMDYyMyAzLjMzOTQ3Ny0xLjIzNTM2N0MzLjMzOTQ3Ny0xLjk1MjY3NyAyLjU1ODQwNi0yLjEwNDExIDIuMjYzNTEyLTIuMTU5OUMxLjg4MDk0Ni0yLjIzMTYzMSAxLjU3MDExMi0yLjI4NzQyMiAxLjU3MDExMi0yLjYyMjE2N0MxLjU3MDExMi0yLjc2NTYyOSAxLjcwNTYwNC0zLjI5MTY1NiAyLjQ3ODcwNS0zLjI5MTY1NkMyLjc4MTU2OS0zLjI5MTY1NiAzLjA5MjQwMy0zLjIwMzk4NSAzLjIxMTk1NS0yLjk5Njc2MlonLz4KPHBhdGggaWQ9J2c1LTQwJyBkPSdNMy44ODU0MyAyLjkwNTEwNkMzLjg4NTQzIDIuODY5MjQgMy44ODU0MyAyLjg0NTMzIDMuNjgyMTkyIDIuNjQyMDkyQzIuNDg2Njc1IDEuNDM0NjIgMS44MTcxODYtLjUzNzk4MyAxLjgxNzE4Ni0yLjk3NjgzN0MxLjgxNzE4Ni01LjI5NjEzOSAyLjM3OTA3OC03LjI5MjY1MyAzLjc2NTg3OC04LjcwMzM2MkMzLjg4NTQzLTguODEwOTU5IDMuODg1NDMtOC44MzQ4NjkgMy44ODU0My04Ljg3MDczNUMzLjg4NTQzLTguOTQyNDY2IDMuODI1NjU0LTguOTY2Mzc2IDMuNzc3ODMzLTguOTY2Mzc2QzMuNjIyNDE2LTguOTY2Mzc2IDIuNjQyMDkyLTguMTA1NjA0IDIuMDU2Mjg5LTYuOTMzOTk4QzEuNDQ2NTc1LTUuNzI2NTI2IDEuMTcxNjA2LTQuNDQ3MzIzIDEuMTcxNjA2LTIuOTc2ODM3QzEuMTcxNjA2LTEuOTEyODI3IDEuMzM4OTc5LS40OTAxNjIgMS45NjA2NDggLjc4OTA0MUMyLjY2NjAwMiAyLjIyMzY2MSAzLjY0NjMyNiAzLjAwMDc0NyAzLjc3NzgzMyAzLjAwMDc0N0MzLjgyNTY1NCAzLjAwMDc0NyAzLjg4NTQzIDIuOTc2ODM3IDMuODg1NDMgMi45MDUxMDZaJy8+CjxwYXRoIGlkPSdnNS00MScgZD0nTTMuMzcxMzU3LTIuOTc2ODM3QzMuMzcxMzU3LTMuODg1NDMgMy4yNTE4MDYtNS4zNjc4NyAyLjU4MjMxNi02Ljc1NDY3QzEuODc2OTYxLTguMTg5MjkgLjg5NjYzOC04Ljk2NjM3NiAuNzY1MTMxLTguOTY2Mzc2Qy43MTczMS04Ljk2NjM3NiAuNjU3NTM0LTguOTQyNDY2IC42NTc1MzQtOC44NzA3MzVDLjY1NzUzNC04LjgzNDg2OSAuNjU3NTM0LTguODEwOTU5IC44NjA3NzItOC42MDc3MjFDMi4wNTYyODktNy40MDAyNDkgMi43MjU3NzgtNS40Mjc2NDYgMi43MjU3NzgtMi45ODg3OTJDMi43MjU3NzgtLjY2OTQ4OSAyLjE2Mzg4NSAxLjMyNzAyNCAuNzc3MDg2IDIuNzM3NzMzQy42NTc1MzQgMi44NDUzMyAuNjU3NTM0IDIuODY5MjQgLjY1NzUzNCAyLjkwNTEwNkMuNjU3NTM0IDIuOTc2ODM3IC43MTczMSAzLjAwMDc0NyAuNzY1MTMxIDMuMDAwNzQ3Qy45MjA1NDggMy4wMDA3NDcgMS45MDA4NzIgMi4xMzk5NzUgMi40ODY2NzUgLjk2ODM2OUMzLjA5NjM4OS0uMjUxMDU5IDMuMzcxMzU3LTEuNTQyMjE3IDMuMzcxMzU3LTIuOTc2ODM3WicvPgo8cGF0aCBpZD0nZzUtNDMnIGQ9J000Ljc3MDExMi0yLjc2MTY0NEg4LjA2OTczOEM4LjIzNzExMS0yLjc2MTY0NCA4LjQ1MjMwNC0yLjc2MTY0NCA4LjQ1MjMwNC0yLjk3NjgzN0M4LjQ1MjMwNC0zLjIwMzk4NSA4LjI0OTA2Ni0zLjIwMzk4NSA4LjA2OTczOC0zLjIwMzk4NUg0Ljc3MDExMlYtNi41MDM2MTFDNC43NzAxMTItNi42NzA5ODQgNC43NzAxMTItNi44ODYxNzcgNC41NTQ5MTktNi44ODYxNzdDNC4zMjc3NzEtNi44ODYxNzcgNC4zMjc3NzEtNi42ODI5MzkgNC4zMjc3NzEtNi41MDM2MTFWLTMuMjAzOTg1SDEuMDI4MTQ0Qy44NjA3NzItMy4yMDM5ODUgLjY0NTU3OS0zLjIwMzk4NSAuNjQ1NTc5LTIuOTg4NzkyQy42NDU1NzktMi43NjE2NDQgLjg0ODgxNy0yLjc2MTY0NCAxLjAyODE0NC0yLjc2MTY0NEg0LjMyNzc3MVYuNTM3OTgzQzQuMzI3NzcxIC43MDUzNTUgNC4zMjc3NzEgLjkyMDU0OCA0LjU0Mjk2NCAuOTIwNTQ4QzQuNzcwMTEyIC45MjA1NDggNC43NzAxMTIgLjcxNzMxIDQuNzcwMTEyIC41Mzc5ODNWLTIuNzYxNjQ0WicvPgo8cGF0aCBpZD0nZzUtNTEnIGQ9J00yLjE5OTc1MS00LjI5MTkwNUMxLjk5NjUxMy00LjI3OTk1IDEuOTQ4NjkyLTQuMjY3OTk1IDEuOTQ4NjkyLTQuMTYwMzk5QzEuOTQ4NjkyLTQuMDQwODQ3IDIuMDA4NDY4LTQuMDQwODQ3IDIuMjIzNjYxLTQuMDQwODQ3SDIuNzczNTk5QzMuNzg5Nzg4LTQuMDQwODQ3IDQuMjQ0MDg1LTMuMjAzOTg1IDQuMjQ0MDg1LTIuMDU2Mjg5QzQuMjQ0MDg1LS40OTAxNjIgMy40MzExMzMtLjA3MTczMSAyLjg0NTMzLS4wNzE3MzFDMi4yNzE0ODItLjA3MTczMSAxLjI5MTE1OC0uMzQ2NyAuOTQ0NDU4LTEuMTM1NzQxQzEuMzI3MDI0LTEuMDc1OTY1IDEuNjczNzI0LTEuMjkxMTU4IDEuNjczNzI0LTEuNzIxNTQ0QzEuNjczNzI0LTIuMDY4MjQ0IDEuNDIyNjY1LTIuMzA3MzQ3IDEuMDg3OTItMi4zMDczNDdDLjgwMDk5Ni0yLjMwNzM0NyAuNDkwMTYyLTIuMTM5OTc1IC40OTAxNjItMS42ODU2NzlDLjQ5MDE2Mi0uNjIxNjY5IDEuNTU0MTcyIC4yNTEwNTkgMi44ODExOTYgLjI1MTA1OUM0LjMwMzg2MSAuMjUxMDU5IDUuMzU1OTE1LS44MzY4NjIgNS4zNTU5MTUtMi4wNDQzMzRDNS4zNTU5MTUtMy4xNDQyMDkgNC40NzEyMzMtNC4wMDQ5ODEgMy4zMjM1MzctNC4yMDgyMTlDNC4zNjM2MzYtNC41MDcwOTggNS4wMzMxMjYtNS4zNzk4MjYgNS4wMzMxMjYtNi4zMTIzMjlDNS4wMzMxMjYtNy4yNTY3ODcgNC4wNTI4MDItNy45NTAxODcgMi44OTMxNTEtNy45NTAxODdDMS42OTc2MzQtNy45NTAxODcgLjgxMjk1MS03LjIyMDkyMiAuODEyOTUxLTYuMzQ4MTk0Qy44MTI5NTEtNS44Njk5ODggMS4xODM1NjItNS43NzQzNDYgMS4zNjI4ODktNS43NzQzNDZDMS42MTM5NDgtNS43NzQzNDYgMS45MDA4NzItNS45NTM2NzQgMS45MDA4NzItNi4zMTIzMjlDMS45MDA4NzItNi42OTQ4OTQgMS42MTM5NDgtNi44NjIyNjcgMS4zNTA5MzQtNi44NjIyNjdDMS4yNzkyMDMtNi44NjIyNjcgMS4yNTUyOTMtNi44NjIyNjcgMS4yMTk0MjctNi44NTAzMTFDMS42NzM3MjQtNy42NjMyNjMgMi43OTc1MDktNy42NjMyNjMgMi44NTcyODUtNy42NjMyNjNDMy4yNTE4MDYtNy42NjMyNjMgNC4wMjg4OTItNy40ODM5MzUgNC4wMjg4OTItNi4zMTIzMjlDNC4wMjg4OTItNi4wODUxODEgMy45OTMwMjYtNS40MTU2OTEgMy42NDYzMjYtNC45MDE2MTlDMy4yODc2NzEtNC4zNzU1OTIgMi44ODExOTYtNC4zMzk3MjYgMi41NTg0MDYtNC4zMjc3NzFMMi4xOTk3NTEtNC4yOTE5MDVaJy8+CjxwYXRoIGlkPSdnNS01MicgZD0nTTQuMzE1ODE2LTcuNzgyODE0QzQuMzE1ODE2LTguMDA5OTYzIDQuMzE1ODE2LTguMDY5NzM4IDQuMTQ4NDQzLTguMDY5NzM4QzQuMDUyODAyLTguMDY5NzM4IDQuMDE2OTM2LTguMDY5NzM4IDMuOTIxMjk1LTcuOTI2Mjc2TC4zMjI3OS0yLjM0MzIxM1YtMS45OTY1MTNIMy40NjY5OTlWLS45MDg1OTNDMy40NjY5OTktLjQ2NjI1MiAzLjQ0MzA4OC0uMzQ2NyAyLjU3MDM2MS0uMzQ2N0gyLjMzMTI1OFYwQzIuNjA2MjI3LS4wMjM5MSAzLjU1MDY4NS0uMDIzOTEgMy44ODU0My0uMDIzOTFTNS4xNzY1ODgtLjAyMzkxIDUuNDUxNTU3IDBWLS4zNDY3SDUuMjEyNDUzQzQuMzUxNjgxLS4zNDY3IDQuMzE1ODE2LS40NjYyNTIgNC4zMTU4MTYtLjkwODU5M1YtMS45OTY1MTNINS41MjMyODhWLTIuMzQzMjEzSDQuMzE1ODE2Vi03Ljc4MjgxNFpNMy41MjY3NzUtNi44NTAzMTFWLTIuMzQzMjEzSC42MjE2NjlMMy41MjY3NzUtNi44NTAzMTFaJy8+CjxwYXRoIGlkPSdnNS02MScgZD0nTTguMDY5NzM4LTMuODczNDc0QzguMjM3MTExLTMuODczNDc0IDguNDUyMzA0LTMuODczNDc0IDguNDUyMzA0LTQuMDg4NjY3QzguNDUyMzA0LTQuMzE1ODE2IDguMjQ5MDY2LTQuMzE1ODE2IDguMDY5NzM4LTQuMzE1ODE2SDEuMDI4MTQ0Qy44NjA3NzItNC4zMTU4MTYgLjY0NTU3OS00LjMxNTgxNiAuNjQ1NTc5LTQuMTAwNjIzQy42NDU1NzktMy44NzM0NzQgLjg0ODgxNy0zLjg3MzQ3NCAxLjAyODE0NC0zLjg3MzQ3NEg4LjA2OTczOFpNOC4wNjk3MzgtMS42NDk4MTNDOC4yMzcxMTEtMS42NDk4MTMgOC40NTIzMDQtMS42NDk4MTMgOC40NTIzMDQtMS44NjUwMDZDOC40NTIzMDQtMi4wOTIxNTQgOC4yNDkwNjYtMi4wOTIxNTQgOC4wNjk3MzgtMi4wOTIxNTRIMS4wMjgxNDRDLjg2MDc3Mi0yLjA5MjE1NCAuNjQ1NTc5LTIuMDkyMTU0IC42NDU1NzktMS44NzY5NjFDLjY0NTU3OS0xLjY0OTgxMyAuODQ4ODE3LTEuNjQ5ODEzIDEuMDI4MTQ0LTEuNjQ5ODEzSDguMDY5NzM4WicvPgo8cGF0aCBpZD0nZzEtMCcgZD0nTTcuODc4NDU2LTIuNzQ5Njg5QzguMDgxNjk0LTIuNzQ5Njg5IDguMjk2ODg3LTIuNzQ5Njg5IDguMjk2ODg3LTIuOTg4NzkyUzguMDgxNjk0LTMuMjI3ODk1IDcuODc4NDU2LTMuMjI3ODk1SDEuNDEwNzFDMS4yMDc0NzItMy4yMjc4OTUgLjk5MjI3OS0zLjIyNzg5NSAuOTkyMjc5LTIuOTg4NzkyUzEuMjA3NDcyLTIuNzQ5Njg5IDEuNDEwNzEtMi43NDk2ODlINy44Nzg0NTZaJy8+CjxwYXRoIGlkPSdnMy0xMycgZD0nTTQuNTE5MDU0LTEuNDU4NTMxQzQuNDk1MTQzLTIuMDQ0MzM0IDQuNDcxMjMzLTIuOTY0ODgyIDQuMDE2OTM2LTQuMDQwODQ3QzMuNzc3ODMzLTQuNjM4NjA1IDMuMzcxMzU3LTUuMjcyMjI5IDIuNDk4NjMtNS4yNzIyMjlDMS4wMjgxNDQtNS4yNzIyMjkgLjIyNzE0OC0zLjM5NTI2OCAuMjI3MTQ4LTMuMDg0NDMzQy4yMjcxNDgtMi45NzY4MzcgLjMxMDgzNC0yLjk3NjgzNyAuMzQ2Ny0yLjk3NjgzN0MuNDU0Mjk2LTIuOTc2ODM3IC40NTQyOTYtMy4wMDA3NDcgLjUxNDA3Mi0zLjE1NjE2NEMuNzY1MTMxLTMuODk3Mzg1IDEuNTMwMjYyLTQuNDgzMTg4IDIuMzU1MTY4LTQuNDgzMTg4QzQuMDE2OTM2LTQuNDgzMTg4IDQuMjU2MDQtMi42MzAxMzcgNC4yNTYwNC0xLjQ0NjU3NUM0LjI1NjA0LS42OTM0IDQuMTcyMzU0LS40NDIzNDEgNC4xMDA2MjMtLjIwMzIzOEMzLjg3MzQ3NCAuNTM3OTgzIDMuNDc4OTU0IDIuMDIwNDIzIDMuNDc4OTU0IDIuMzU1MTY4QzMuNDc4OTU0IDIuNDUwODA5IDMuNTE0ODE5IDIuNTU4NDA2IDMuNjEwNDYxIDIuNTU4NDA2QzMuNzg5Nzg4IDIuNTU4NDA2IDMuODk3Mzg1IDIuMTYzODg1IDQuMDI4ODkyIDEuNjg1Njc5QzQuMzE1ODE2IC42MzM2MjQgNC4zODc1NDcgLjEwNzU5NyA0LjQ0NzMyMy0uMzcwNjFDNC40ODMxODgtLjY1NzUzNCA1LjE2NDYzMy0yLjYzMDEzNyA2LjEwOTA5MS00LjUwNzA5OEM2LjE5Mjc3Ny00LjY5ODM4MSA2LjM2MDE0OS01LjAyMTE3MSA2LjM2MDE0OS01LjA1NzAzNkM2LjM2MDE0OS01LjA2ODk5MSA2LjM0ODE5NC01LjE1MjY3NyA2LjI0MDU5OC01LjE1MjY3N0M2LjIxNjY4Ny01LjE1MjY3NyA2LjE1NjkxMi01LjE1MjY3NyA2LjEzMzAwMS01LjEwNDg1N0M2LjEwOTA5MS01LjA4MDk0NiA1LjY5MDY2LTQuMjY3OTk1IDUuMzMyMDA1LTMuNDU1MDQ0QzUuMTUyNjc3LTMuMDQ4NTY4IDQuOTEzNTc0LTIuNTEwNTg1IDQuNTE5MDU0LTEuNDU4NTMxWicvPgo8cGF0aCBpZD0nZzMtMTYnIGQ9J00yLjI1OTUyNy0uNTg1ODAzQzEuNTU0MTcyLS44NjA3NzIgMS4xNDc2OTYtMS4zOTg3NTUgMS4xNDc2OTYtMi4yOTUzOTJDMS4xNDc2OTYtMy45MzMyNSAyLjM1NTE2OC02LjEyMTA0NiAzLjgyNTY1NC02Ljk2OTg2M0M0LjA0MDg0Ny02Ljc2NjYyNSA0LjMxNTgxNi02Ljc2NjYyNSA0LjU0Mjk2NC02Ljc2NjYyNUM0Ljg0MTg0My02Ljc2NjYyNSA1LjU3MTEwOC02Ljc2NjYyNSA1LjU3MTEwOC03LjExMzMyNUM1LjU3MTEwOC03LjQwMDI0OSA1LjAzMzEyNi03LjQxMjIwNCA0LjY1MDU2LTcuNDEyMjA0QzQuNDExNDU3LTcuNDEyMjA0IDQuMjA4MjE5LTcuNDEyMjA0IDMuODk3Mzg1LTcuMjgwNjk3QzMuODI1NjU0LTcuNDM2MTE1IDMuNzg5Nzg4LTcuNjAzNDg3IDMuNzg5Nzg4LTcuNzgyODE0QzMuNzg5Nzg4LTcuOTk4MDA3IDMuODM3NjA5LTguMTY1MzggMy44Mzc2MDktOC4yMDEyNDVDMy44Mzc2MDktOC4yNzI5NzYgMy43Nzc4MzMtOC4zMjA3OTcgMy43MTgwNTctOC4zMjA3OTdDMy41MjY3NzUtOC4zMjA3OTcgMy41MjY3NzUtNy44Nzg0NTYgMy41MjY3NzUtNy43ODI4MTRDMy41MjY3NzUtNy42NzUyMTggMy41MjY3NzUtNy40MjQxNTkgMy42NzAyMzctNy4xNzMxMDFDMi4yODM0MzctNi40NTU3OTEgLjUzNzk4My00LjIyMDE3NCAuNTM3OTgzLTEuOTg0NTU4Qy41Mzc5ODMtLjM0NjcgMS42MjU5MDMgLjAzNTg2NiAyLjI0NzU3MiAuMjUxMDU5QzIuNDAyOTg5IC4yOTg4NzkgMi43ODU1NTQgLjQzMDM4NiAyLjk0MDk3MSAuNDkwMTYyQzMuNDMxMTMzIC42NTc1MzQgMy44OTczODUgLjgxMjk1MSAzLjg5NzM4NSAxLjM4NjhDMy44OTczODUgMS43MzM0OTkgMy42NDYzMjYgMi4xOTk3NTEgMy4yMDM5ODUgMi4xOTk3NTFDMi45NjQ4ODIgMi4xOTk3NTEgMi42NDIwOTIgMi4xMTYwNjUgMi4zNDMyMTMgMS44MTcxODZDMi4yOTUzOTIgMS43NjkzNjUgMi4yNzE0ODIgMS43NDU0NTUgMi4yMTE3MDYgMS43NDU0NTVDMi4xMTYwNjUgMS43NDU0NTUgMi4wOTIxNTQgMS44NDEwOTYgMi4wOTIxNTQgMS44NjUwMDZDMi4wOTIxNTQgMS45ODQ1NTggMi42MDYyMjcgMi40Mzg4NTQgMy4yMDM5ODUgMi40Mzg4NTRDMy45NjkxMTYgMi40Mzg4NTQgNC40OTUxNDMgMS42Mzc4NTggNC40OTUxNDMgMS4wMTYxODlDNC40OTUxNDMgLjE3OTMyOCAzLjgwMTc0My0uMDU5Nzc2IDMuMzU5NDAyLS4yMDMyMzhMMi4yNTk1MjctLjU4NTgwM1pNNC4wODg2NjctNy4wODk0MTVDNC4yNjc5OTUtNy4xNzMxMDEgNC40MzUzNjctNy4xNzMxMDEgNC42Mzg2MDUtNy4xNzMxMDFDNS4wMjExNzEtNy4xNzMxMDEgNS4wNTcwMzYtNy4xNjExNDYgNS4yOTYxMzktNy4xMDEzN0M1LjE1MjY3Ny03LjA0MTU5NCA1LjA1NzAzNi03LjAwNTcyOSA0LjU1NDkxOS03LjAwNTcyOUM0LjMwMzg2MS03LjAwNTcyOSA0LjIyMDE3NC03LjAwNTcyOSA0LjA4ODY2Ny03LjA4OTQxNVonLz4KPHBhdGggaWQ9J2czLTE4JyBkPSdNNS4yOTYxMzktNi4wMTM0NUM1LjI5NjEzOS03LjIzMjg3NyA0LjkxMzU3NC04LjQxNjQzOCAzLjkzMzI1LTguNDE2NDM4QzIuMjU5NTI3LTguNDE2NDM4IC40NzgyMDctNC45MTM1NzQgLjQ3ODIwNy0yLjI4MzQzN0MuNDc4MjA3LTEuNzMzNDk5IC41OTc3NTggLjExOTU1MiAxLjg1MzA1MSAuMTE5NTUyQzMuNDc4OTU0IC4xMTk1NTIgNS4yOTYxMzktMy4yOTk2MjYgNS4yOTYxMzktNi4wMTM0NVpNMS42NzM3MjQtNC4zMjc3NzFDMS44NTMwNTEtNS4wMzMxMjYgMi4xMDQxMS02LjAzNzM2IDIuNTgyMzE2LTYuODg2MTc3QzIuOTc2ODM3LTcuNjAzNDg3IDMuMzk1MjY4LTguMTc3MzM1IDMuOTIxMjk1LTguMTc3MzM1QzQuMzE1ODE2LTguMTc3MzM1IDQuNTc4ODI5LTcuODQyNTkgNC41Nzg4MjktNi42OTQ4OTRDNC41Nzg4MjktNi4yNjQ1MDggNC41NDI5NjQtNS42NjY3NSA0LjE5NjI2NC00LjMyNzc3MUgxLjY3MzcyNFpNNC4xMTI1NzgtMy45NjkxMTZDMy44MTM2OTktMi43OTc1MDkgMy41NjI2NC0yLjA0NDMzNCAzLjEzMjI1NC0xLjI5MTE1OEMyLjc4NTU1NC0uNjgxNDQ1IDIuMzY3MTIzLS4xMTk1NTIgMS44NjUwMDYtLjExOTU1MkMxLjQ5NDM5Ni0uMTE5NTUyIDEuMTk1NTE3LS40MDY0NzYgMS4xOTU1MTctMS41OTAwMzdDMS4xOTU1MTctMi4zNjcxMjMgMS4zODY4LTMuMTgwMDc1IDEuNTc4MDgyLTMuOTY5MTE2SDQuMTEyNTc4WicvPgo8cGF0aCBpZD0nZzMtMjUnIGQ9J00zLjA5NjM4OS00LjUwNzA5OEg0LjQ0NzMyM0M0LjEyNDUzMy0zLjE2ODEyIDMuOTIxMjk1LTIuMjk1MzkyIDMuOTIxMjk1LTEuMzM4OTc5QzMuOTIxMjk1LTEuMTcxNjA2IDMuOTIxMjk1IC4xMTk1NTIgNC40MTE0NTcgLjExOTU1MkM0LjY2MjUxNiAuMTE5NTUyIDQuODc3NzA5LS4xMDc1OTcgNC44Nzc3MDktLjMxMDgzNEM0Ljg3NzcwOS0uMzcwNjEgNC44Nzc3MDktLjM5NDUyMSA0Ljc5NDAyMi0uNTczODQ4QzQuNDcxMjMzLTEuMzk4NzU1IDQuNDcxMjMzLTIuNDI2ODk5IDQuNDcxMjMzLTIuNTEwNTg1QzQuNDcxMjMzLTIuNTgyMzE2IDQuNDcxMjMzLTMuNDMxMTMzIDQuNzIyMjkxLTQuNTA3MDk4SDYuMDYxMjdDNi4yMTY2ODctNC41MDcwOTggNi42MTEyMDgtNC41MDcwOTggNi42MTEyMDgtNC44ODk2NjRDNi42MTEyMDgtNS4xNTI2NzcgNi4zODQwNi01LjE1MjY3NyA2LjE2ODg2Ny01LjE1MjY3N0gyLjIzNTYxNkMxLjk2MDY0OC01LjE1MjY3NyAxLjU1NDE3Mi01LjE1MjY3NyAxLjAwNDIzNC00LjU2Njg3NEMuNjkzNC00LjIyMDE3NCAuMzEwODM0LTMuNTg2NTUgLjMxMDgzNC0zLjUxNDgxOVMuMzcwNjEtMy40MTkxNzggLjQ0MjM0MS0zLjQxOTE3OEMuNTI2MDI3LTMuNDE5MTc4IC41Mzc5ODMtMy40NTUwNDQgLjU5Nzc1OC0zLjUyNjc3NUMxLjIxOTQyNy00LjUwNzA5OCAxLjg0MTA5Ni00LjUwNzA5OCAyLjEzOTk3NS00LjUwNzA5OEgyLjgyMTQyQzIuNTU4NDA2LTMuNjEwNDYxIDIuMjU5NTI3LTIuNTcwMzYxIDEuMjc5MjAzLS40NzgyMDdDMS4xODM1NjItLjI4NjkyNCAxLjE4MzU2Mi0uMjYzMDE0IDEuMTgzNTYyLS4xOTEyODNDMS4xODM1NjIgLjA1OTc3NiAxLjM5ODc1NSAuMTE5NTUyIDEuNTA2MzUxIC4xMTk1NTJDMS44NTMwNTEgLjExOTU1MiAxLjk0ODY5Mi0uMTkxMjgzIDIuMDkyMTU0LS42OTM0QzIuMjgzNDM3LTEuMzAzMTEzIDIuMjgzNDM3LTEuMzI3MDI0IDIuNDAyOTg5LTEuODA1MjNMMy4wOTYzODktNC41MDcwOThaJy8+CjxwYXRoIGlkPSdnMy0zMycgZD0nTTcuMTAxMzctNC40OTUxNDNDNy4xMDEzNy00Ljg0MTg0MyA3LjAwNTcyOS01LjI4NDE4NCA2LjU4NzI5OC01LjI4NDE4NEM2LjM0ODE5NC01LjI4NDE4NCA2LjA3MzIyNS00Ljk4NTMwNSA2LjA3MzIyNS00Ljc0NjIwMkM2LjA3MzIyNS00LjYzODYwNSA2LjEyMTA0Ni00LjU2Njg3NCA2LjIxNjY4Ny00LjQ1OTI3OEM2LjM5NjAxNS00LjI1NjA0IDYuNjIzMTYzLTMuOTMzMjUgNi42MjMxNjMtMy4zNzEzNTdDNi42MjMxNjMtMi45NDA5NzEgNi4zNjAxNDktMi4yNTk1MjcgNi4xNjg4NjctMS44ODg5MTdDNS44MzQxMjItMS4yMzEzODIgNS4yODQxODQtLjY2OTQ4OSA0LjY2MjUxNi0uNjY5NDg5QzMuOTA5MzQtLjY2OTQ4OSAzLjYyMjQxNi0xLjE0NzY5NiAzLjQ5MDkwOS0xLjgxNzE4NkMzLjYyMjQxNi0yLjEyODAyIDMuODk3Mzg1LTIuOTA1MTA2IDMuODk3Mzg1LTMuMjE1OTRDMy44OTczODUtMy4zNDc0NDcgMy44NDk1NjQtMy40NTUwNDQgMy42OTQxNDctMy40NTUwNDRDMy42MTA0NjEtMy40NTUwNDQgMy41MTQ4MTktMy40MDcyMjMgMy40NTUwNDQtMy4zMTE1ODJDMy4yODc2NzEtMy4wNDg1NjggMy4xMzIyNTQtMi4xMDQxMSAzLjE0NDIwOS0xLjg1MzA1MUMyLjkxNzA2MS0xLjQxMDcxIDIuMjcxNDgyLS42Njk0ODkgMS41MDYzNTEtLjY2OTQ4OUMuNzA1MzU1LS42Njk0ODkgLjQ5MDE2Mi0xLjM3NDg0NCAuNDkwMTYyLTIuMDU2Mjg5Qy40OTAxNjItMy4yOTk2MjYgMS4yNjcyNDgtNC4zODc1NDcgMS40ODI0NDEtNC42ODY0MjZDMS42MDE5OTMtNC44NjU3NTMgMS42ODU2NzktNC45ODUzMDUgMS42ODU2NzktNS4wMDkyMTVDMS42ODU2NzktNS4wOTI5MDIgMS42Mzc4NTgtNS4yMjQ0MDggMS41MzAyNjItNS4yMjQ0MDhDMS4zMzg5NzktNS4yMjQ0MDggMS4yNzkyMDMtNS4wNjg5OTEgMS4xODM1NjItNC45MjU1MjlDLjU3Mzg0OC0zLjk4MTA3MSAuMTQzNDYyLTIuNjU0MDQ3IC4xNDM0NjItMS41MDYzNTFDLjE0MzQ2Mi0uNzY1MTMxIC40MTg0MzEgLjExOTU1MiAxLjMxNTA2OCAuMTE5NTUyQzIuMzA3MzQ3IC4xMTk1NTIgMi45MjkwMTYtLjcyOTI2NSAzLjE4MDA3NS0xLjE4MzU2MkMzLjI3NTcxNi0uNTE0MDcyIDMuNjM0MzcxIC4xMTk1NTIgNC41MDcwOTggLjExOTU1MkM1LjQxNTY5MSAuMTE5NTUyIDUuOTg5NTM5LS42ODE0NDUgNi40MTk5MjUtMS42NDk4MTNDNi43MzA3Ni0yLjM0MzIxMyA3LjEwMTM3LTMuODM3NjA5IDcuMTAxMzctNC40OTUxNDNaJy8+CjxwYXRoIGlkPSdnMy03MCcgZD0nTTMuNTUwNjg1LTMuODk3Mzg1SDQuNjk4MzgxQzUuNjA2OTc0LTMuODk3Mzg1IDUuNjc4NzA1LTMuNjk0MTQ3IDUuNjc4NzA1LTMuMzQ3NDQ3QzUuNjc4NzA1LTMuMTkyMDMgNS42NTQ3OTUtMy4wMjQ2NTggNS41OTUwMTktMi43NjE2NDRDNS41NzExMDgtMi43MTM4MjMgNS41NTkxNTMtMi42NTQwNDcgNS41NTkxNTMtMi42MzAxMzdDNS41NTkxNTMtMi41NDY0NTEgNS42MDY5NzQtMi40OTg2MyA1LjY5MDY2LTIuNDk4NjNDNS43ODYzMDEtMi40OTg2MyA1Ljc5ODI1Ny0yLjU0NjQ1MSA1Ljg0NjA3Ny0yLjczNzczM0w2LjUzOTQ3Ny01LjUyMzI4OEM2LjUzOTQ3Ny01LjU3MTEwOCA2LjUwMzYxMS01LjY0MjgzOSA2LjQxOTkyNS01LjY0MjgzOUM2LjMxMjMyOS01LjY0MjgzOSA2LjMwMDM3NC01LjU5NTAxOSA2LjI1MjU1My01LjM5MTc4MUM2LjAwMTQ5NC00LjQ5NTE0MyA1Ljc2MjM5MS00LjI0NDA4NSA0LjcyMjI5MS00LjI0NDA4NUgzLjYzNDM3MUw0LjQxMTQ1Ny03LjM0MDQ3M0M0LjUxOTA1NC03Ljc1ODkwNCA0LjU0Mjk2NC03Ljc5NDc3IDUuMDMzMTI2LTcuNzk0NzdINi42MzUxMThDOC4xMjk1MTQtNy43OTQ3NyA4LjM0NDcwNy03LjM1MjQyOCA4LjM0NDcwNy02LjUwMzYxMUM4LjM0NDcwNy02LjQzMTg4IDguMzQ0NzA3LTYuMTY4ODY3IDguMzA4ODQyLTUuODU4MDMyQzguMjk2ODg3LTUuODEwMjEyIDguMjcyOTc2LTUuNjU0Nzk1IDguMjcyOTc2LTUuNjA2OTc0QzguMjcyOTc2LTUuNTExMzMzIDguMzMyNzUyLTUuNDc1NDY3IDguNDA0NDgzLTUuNDc1NDY3QzguNDg4MTY5LTUuNDc1NDY3IDguNTM1OTktNS41MjMyODggOC41NTk5LTUuNzM4NDgxTDguODEwOTU5LTcuODMwNjM1QzguODEwOTU5LTcuODY2NTAxIDguODM0ODY5LTcuOTg2MDUyIDguODM0ODY5LTguMDA5OTYzQzguODM0ODY5LTguMTQxNDY5IDguNzI3MjczLTguMTQxNDY5IDguNTEyMDgtOC4xNDE0NjlIMi44NDUzM0MyLjYxODE4Mi04LjE0MTQ2OSAyLjQ5ODYzLTguMTQxNDY5IDIuNDk4NjMtNy45MjYyNzZDMi40OTg2My03Ljc5NDc3IDIuNTgyMzE2LTcuNzk0NzcgMi43ODU1NTQtNy43OTQ3N0MzLjUyNjc3NS03Ljc5NDc3IDMuNTI2Nzc1LTcuNzExMDgzIDMuNTI2Nzc1LTcuNTc5NTc3QzMuNTI2Nzc1LTcuNTE5ODAxIDMuNTE0ODE5LTcuNDcxOTggMy40Nzg5NTQtNy4zNDA0NzNMMS44NjUwMDYtLjg4NDY4MkMxLjc1NzQxLS40NjYyNTIgMS43MzM0OTktLjM0NjcgLjg5NjYzOC0uMzQ2N0MuNjY5NDg5LS4zNDY3IC41NDk5MzgtLjM0NjcgLjU0OTkzOC0uMTMxNTA3Qy41NDk5MzggMCAuNjU3NTM0IDAgLjcyOTI2NSAwQy45NTY0MTMgMCAxLjE5NTUxNy0uMDIzOTEgMS40MjI2NjUtLjAyMzkxSDIuOTc2ODM3QzMuMjM5ODUxLS4wMjM5MSAzLjUyNjc3NSAwIDMuNzg5Nzg4IDBDMy44OTczODUgMCA0LjA0MDg0NyAwIDQuMDQwODQ3LS4yMTUxOTNDNC4wNDA4NDctLjM0NjcgMy45NjkxMTYtLjM0NjcgMy43MDYxMDItLjM0NjdDMi43NjE2NDQtLjM0NjcgMi43Mzc3MzMtLjQzMDM4NiAyLjczNzczMy0uNjA5NzE0QzIuNzM3NzMzLS42Njk0ODkgMi43NjE2NDQtLjc2NTEzMSAyLjc4NTU1NC0uODQ4ODE3TDMuNTUwNjg1LTMuODk3Mzg1WicvPgo8cGF0aCBpZD0nZzMtNzEnIGQ9J004LjkxODU1NS04LjMwODg0MkM4LjkxODU1NS04LjQxNjQzOCA4LjgzNDg2OS04LjQxNjQzOCA4LjgxMDk1OS04LjQxNjQzOFM4LjczOTIyOC04LjQxNjQzOCA4LjY0MzU4Ny04LjI5Njg4N0w3LjgxODY4LTcuMzA0NjA4QzcuNzU4OTA0LTcuNDAwMjQ5IDcuNTE5ODAxLTcuODE4NjggNy4wNTM1NDktOC4wOTM2NDlDNi41Mzk0NzctOC40MTY0MzggNi4wMjU0MDUtOC40MTY0MzggNS44NDYwNzctOC40MTY0MzhDMy4yODc2NzEtOC40MTY0MzggLjU5Nzc1OC01LjgxMDIxMiAuNTk3NzU4LTIuOTg4NzkyQy41OTc3NTgtMS4wMTYxODkgMS45NjA2NDggLjI1MTA1OSAzLjc1MzkyMyAuMjUxMDU5QzQuNjE0Njk1IC4yNTEwNTkgNS43MDI2MTUtLjAzNTg2NiA2LjMwMDM3NC0uNzg5MDQxQzYuNDMxODgtLjMzNDc0NSA2LjY5NDg5NC0uMDExOTU1IDYuNzc4NTgtLjAxMTk1NUM2LjgzODM1Ni0uMDExOTU1IDYuODUwMzExLS4wNDc4MjEgNi44NjIyNjctLjA0NzgyMUM2Ljg3NDIyMi0uMDcxNzMxIDYuOTY5ODYzLS40OTAxNjIgNy4wMjk2MzktLjcwNTM1NUw3LjIyMDkyMi0xLjQ3MDQ4NkM3LjMxNjU2My0xLjg2NTAwNiA3LjM2NDM4NC0yLjAzMjM3OSA3LjQ0ODA3LTIuMzkxMDM0QzcuNTY3NjIxLTIuODQ1MzMgNy41OTE1MzItMi44ODExOTYgOC4yNDkwNjYtMi44OTMxNTFDOC4yOTY4ODctMi44OTMxNTEgOC40NDAzNDktMi44OTMxNTEgOC40NDAzNDktMy4xMjAyOTlDOC40NDAzNDktMy4yMzk4NTEgOC4zMjA3OTctMy4yMzk4NTEgOC4yODQ5MzItMy4yMzk4NTFDOC4wODE2OTQtMy4yMzk4NTEgNy44NTQ1NDUtMy4yMTU5NCA3LjYzOTM1Mi0zLjIxNTk0SDYuOTkzNzczQzYuNDkxNjU2LTMuMjE1OTQgNS45NjU2MjktMy4yMzk4NTEgNS40NzU0NjctMy4yMzk4NTFDNS4zNjc4Ny0zLjIzOTg1MSA1LjIyNDQwOC0zLjIzOTg1MSA1LjIyNDQwOC0zLjAyNDY1OEM1LjIyNDQwOC0yLjkwNTEwNiA1LjMyMDA1LTIuOTA1MTA2IDUuMzIwMDUtMi44OTMxNTFINS42MTg5MjlDNi41NjMzODctMi44OTMxNTEgNi41NjMzODctMi43OTc1MDkgNi41NjMzODctMi42MTgxODJDNi41NjMzODctMi42MDYyMjcgNi4zMzYyMzktMS4zOTg3NTUgNi4xMDkwOTEtMS4wNDAxQzUuNjU0Nzk1LS4zNzA2MSA0LjcxMDMzNi0uMDk1NjQxIDQuMDA0OTgxLS4wOTU2NDFDMy4wODQ0MzMtLjA5NTY0MSAxLjU5MDAzNy0uNTczODQ4IDEuNTkwMDM3LTIuNjQyMDkyQzEuNTkwMDM3LTMuNDQzMDg4IDEuODc2OTYxLTUuMjcyMjI5IDMuMDM2NjEzLTYuNjIzMTYzQzMuNzg5Nzg4LTcuNDgzOTM1IDQuOTAxNjE5LTguMDY5NzM4IDUuOTUzNjc0LTguMDY5NzM4QzcuMzY0Mzg0LTguMDY5NzM4IDcuODY2NTAxLTYuODYyMjY3IDcuODY2NTAxLTUuNzYyMzkxQzcuODY2NTAxLTUuNTcxMTA4IDcuODE4NjgtNS4zMDgwOTUgNy44MTg2OC01LjE0MDcyMkM3LjgxODY4LTUuMDMzMTI2IDcuOTM4MjMyLTUuMDMzMTI2IDcuOTc0MDk3LTUuMDMzMTI2QzguMTA1NjA0LTUuMDMzMTI2IDguMTE3NTU5LTUuMDQ1MDgxIDguMTY1MzgtNS4yNjAyNzRMOC45MTg1NTUtOC4zMDg4NDJaJy8+CjxwYXRoIGlkPSdnMy04MycgZD0nTTcuNTkxNTMyLTguMzA4ODQyQzcuNTkxNTMyLTguNDE2NDM4IDcuNTA3ODQ2LTguNDE2NDM4IDcuNDgzOTM1LTguNDE2NDM4QzcuNDM2MTE1LTguNDE2NDM4IDcuNDI0MTU5LTguNDA0NDgzIDcuMjgwNjk3LTguMjI1MTU2QzcuMjA4OTY2LTguMTQxNDY5IDYuNzE4ODA0LTcuNTE5ODAxIDYuNzA2ODQ5LTcuNTA3ODQ2QzYuMzEyMzI5LTguMjg0OTMyIDUuNTIzMjg4LTguNDE2NDM4IDUuMDIxMTcxLTguNDE2NDM4QzMuNTAyODY0LTguNDE2NDM4IDIuMTI4MDItNy4wMjk2MzkgMi4xMjgwMi01LjY3ODcwNUMyLjEyODAyLTQuNzgyMDY3IDIuNjY2MDAyLTQuMjU2MDQgMy4yNTE4MDYtNC4wNTI4MDJDMy4zODMzMTMtNC4wMDQ5ODEgNC4wODg2NjctMy44MTM2OTkgNC40NDczMjMtMy43MzAwMTJDNS4wNTcwMzYtMy41NjI2NCA1LjIxMjQ1My0zLjUxNDgxOSA1LjQ2MzUxMi0zLjI1MTgwNkM1LjUxMTMzMy0zLjE5MjAzIDUuNzUwNDM2LTIuOTE3MDYxIDUuNzUwNDM2LTIuMzU1MTY4QzUuNzUwNDM2LTEuMjQzMzM3IDQuNzIyMjkxLS4wOTU2NDEgMy41MjY3NzUtLjA5NTY0MUMyLjU0NjQ1MS0uMDk1NjQxIDEuNDU4NTMxLS41MTQwNzIgMS40NTg1MzEtMS44NTMwNTFDMS40NTg1MzEtMi4wODAxOTkgMS41MDYzNTEtMi4zNjcxMjMgMS41NDIyMTctMi40ODY2NzVDMS41NDIyMTctMi41MjI1NCAxLjU1NDE3Mi0yLjU4MjMxNiAxLjU1NDE3Mi0yLjYwNjIyN0MxLjU1NDE3Mi0yLjY1NDA0NyAxLjUzMDI2Mi0yLjcxMzgyMyAxLjQzNDYyLTIuNzEzODIzQzEuMzI3MDI0LTIuNzEzODIzIDEuMzE1MDY4LTIuNjg5OTEzIDEuMjY3MjQ4LTIuNDg2Njc1TC42NTc1MzQtLjAzNTg2NkMuNjU3NTM0LS4wMjM5MSAuNjA5NzE0IC4xMzE1MDcgLjYwOTcxNCAuMTQzNDYyQy42MDk3MTQgLjI1MTA1OSAuNzA1MzU1IC4yNTEwNTkgLjcyOTI2NSAuMjUxMDU5Qy43NzcwODYgLjI1MTA1OSAuNzg5MDQxIC4yMzkxMDMgLjkzMjUwMyAuMDU5Nzc2TDEuNDgyNDQxLS42NTc1MzRDMS43NjkzNjUtLjIyNzE0OCAyLjM5MTAzNCAuMjUxMDU5IDMuNTAyODY0IC4yNTEwNTlDNS4wNDUwODEgLjI1MTA1OSA2LjQ1NTc5MS0xLjI0MzMzNyA2LjQ1NTc5MS0yLjczNzczM0M2LjQ1NTc5MS0zLjIzOTg1MSA2LjMzNjIzOS0zLjY4MjE5MiA1Ljg4MTk0My00LjEyNDUzM0M1LjYzMDg4NC00LjM3NTU5MiA1LjQxNTY5MS00LjQzNTM2NyA0LjMxNTgxNi00LjcyMjI5MUMzLjUxNDgxOS00LjkzNzQ4NCAzLjQwNzIyMy00Ljk3MzM1IDMuMTkyMDMtNS4xNjQ2MzNDMi45ODg3OTItNS4zNjc4NyAyLjgzMzM3NS01LjY1NDc5NSAyLjgzMzM3NS02LjA2MTI3QzIuODMzMzc1LTcuMDY1NTA0IDMuODQ5NTY0LTguMDkzNjQ5IDQuOTg1MzA1LTguMDkzNjQ5QzYuMTU2OTEyLTguMDkzNjQ5IDYuNzA2ODQ5LTcuMzc2MzM5IDYuNzA2ODQ5LTYuMjQwNTk4QzYuNzA2ODQ5LTUuOTI5NzYzIDYuNjQ3MDczLTUuNjA2OTc0IDYuNjQ3MDczLTUuNTU5MTUzQzYuNjQ3MDczLTUuNDUxNTU3IDYuNzQyNzE1LTUuNDUxNTU3IDYuNzc4NTgtNS40NTE1NTdDNi44ODYxNzctNS40NTE1NTcgNi44OTgxMzItNS40ODc0MjIgNi45NDU5NTMtNS42Nzg3MDVMNy41OTE1MzItOC4zMDg4NDJaJy8+CjxwYXRoIGlkPSdnMy0xMDcnIGQ9J00zLjM1OTQwMi03Ljk5ODAwN0MzLjM3MTM1Ny04LjA0NTgyOCAzLjM5NTI2OC04LjExNzU1OSAzLjM5NTI2OC04LjE3NzMzNUMzLjM5NTI2OC04LjI5Njg4NyAzLjI3NTcxNi04LjI5Njg4NyAzLjI1MTgwNi04LjI5Njg4N0MzLjIzOTg1MS04LjI5Njg4NyAyLjgwOTQ2NS04LjI2MTAyMSAyLjU5NDI3MS04LjIzNzExMUMyLjM5MTAzNC04LjIyNTE1NiAyLjIxMTcwNi04LjIwMTI0NSAxLjk5NjUxMy04LjE4OTI5QzEuNzA5NTg5LTguMTY1MzggMS42MjU5MDMtOC4xNTM0MjUgMS42MjU5MDMtNy45MzgyMzJDMS42MjU5MDMtNy44MTg2OCAxLjc0NTQ1NS03LjgxODY4IDEuODY1MDA2LTcuODE4NjhDMi40NzQ3Mi03LjgxODY4IDIuNDc0NzItNy43MTEwODMgMi40NzQ3Mi03LjU5MTUzMkMyLjQ3NDcyLTcuNTQzNzExIDIuNDc0NzItNy41MTk4MDEgMi40MTQ5NDQtNy4zMDQ2MDhMLjcwNTM1NS0uNDY2MjUyQy42NTc1MzQtLjI4NjkyNCAuNjU3NTM0LS4yNjMwMTQgLjY1NzUzNC0uMTkxMjgzQy42NTc1MzQgLjA3MTczMSAuODYwNzcyIC4xMTk1NTIgLjk4MDMyNCAuMTE5NTUyQzEuMzE1MDY4IC4xMTk1NTIgMS4zODY4LS4xNDM0NjIgMS40ODI0NDEtLjUxNDA3MkwyLjA0NDMzNC0yLjc0OTY4OUMyLjkwNTEwNi0yLjY1NDA0NyAzLjQxOTE3OC0yLjI5NTM5MiAzLjQxOTE3OC0xLjcyMTU0NEMzLjQxOTE3OC0xLjY0OTgxMyAzLjQxOTE3OC0xLjYwMTk5MyAzLjM4MzMxMy0xLjQyMjY2NUMzLjMzNTQ5Mi0xLjI0MzMzNyAzLjMzNTQ5Mi0xLjA5OTg3NSAzLjMzNTQ5Mi0xLjA0MDFDMy4zMzU0OTItLjM0NjcgMy43ODk3ODggLjExOTU1MiA0LjM5OTUwMiAuMTE5NTUyQzQuOTQ5NDQgLjExOTU1MiA1LjIzNjM2NC0uMzgyNTY1IDUuMzMyMDA1LS41NDk5MzhDNS41ODMwNjQtLjk5MjI3OSA1LjczODQ4MS0xLjY2MTc2OCA1LjczODQ4MS0xLjcwOTU4OUM1LjczODQ4MS0xLjc2OTM2NSA1LjY5MDY2LTEuODE3MTg2IDUuNjE4OTI5LTEuODE3MTg2QzUuNTExMzMzLTEuODE3MTg2IDUuNDk5Mzc3LTEuNzY5MzY1IDUuNDUxNTU3LTEuNTc4MDgyQzUuMjg0MTg0LS45NTY0MTMgNS4wMzMxMjYtLjExOTU1MiA0LjQyMzQxMi0uMTE5NTUyQzQuMTg0MzA5LS4xMTk1NTIgNC4wMjg4OTItLjIzOTEwMyA0LjAyODg5Mi0uNjkzNEM0LjAyODg5Mi0uOTIwNTQ4IDQuMDc2NzEyLTEuMTgzNTYyIDQuMTI0NTMzLTEuMzYyODg5QzQuMTcyMzU0LTEuNTc4MDgyIDQuMTcyMzU0LTEuNTkwMDM3IDQuMTcyMzU0LTEuNzMzNDk5QzQuMTcyMzU0LTIuNDM4ODU0IDMuNTM4NzMtMi44MzMzNzUgMi40Mzg4NTQtMi45NzY4MzdDMi44NjkyNC0zLjIzOTg1MSAzLjI5OTYyNi0zLjcwNjEwMiAzLjQ2Njk5OS0zLjg4NTQzQzQuMTQ4NDQzLTQuNjUwNTYgNC42MTQ2OTUtNS4wMzMxMjYgNS4xNjQ2MzMtNS4wMzMxMjZDNS40Mzk2MDEtNS4wMzMxMjYgNS41MTEzMzMtNC45NjEzOTUgNS41OTUwMTktNC44ODk2NjRDNS4xNTI2NzctNC44NDE4NDMgNC45ODUzMDUtNC41MzEwMDkgNC45ODUzMDUtNC4yOTE5MDVDNC45ODUzMDUtNC4wMDQ5ODEgNS4yMTI0NTMtMy45MDkzNCA1LjM3OTgyNi0zLjkwOTM0QzUuNzAyNjE1LTMuOTA5MzQgNS45ODk1MzktNC4xODQzMDkgNS45ODk1MzktNC41NjY4NzRDNS45ODk1MzktNC45MTM1NzQgNS43MTQ1Ny01LjI3MjIyOSA1LjE3NjU4OC01LjI3MjIyOUM0LjUxOTA1NC01LjI3MjIyOSAzLjk4MTA3MS00LjgwNTk3OCAzLjEzMjI1NC0zLjg0OTU2NEMzLjAxMjcwMi0zLjcwNjEwMiAyLjU3MDM2MS0zLjI1MTgwNiAyLjEyODAyLTMuMDg0NDMzTDMuMzU5NDAyLTcuOTk4MDA3WicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMzguNjE3Mzc3JyB5PSctMTMuNTE2MTE4JyB4bGluazpocmVmPScjZzMtNzEnLz4KPHVzZSB4PSc1MS4xNzE4MjknIHk9Jy0xMy41MTYxMTgnIHhsaW5rOmhyZWY9JyNnNS02MScvPgo8dXNlIHg9JzYzLjU5NzMxJyB5PSctMTMuNTE2MTE4JyB4bGluazpocmVmPScjZzMtNzAnLz4KPHVzZSB4PSc3MS4xNzUwOTUnIHk9Jy0xMS43MjI4NTQnIHhsaW5rOmhyZWY9JyNnMi0xMTUnLz4KPHVzZSB4PSc3OC4yNDU4MDknIHk9Jy0xMy41MTYxMTgnIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nOTAuMjAwOTY5JyB5PSctMTMuNTE2MTE4JyB4bGluazpocmVmPScjZzUtNTEnLz4KPHVzZSB4PSc5Ni4wNTM5NTknIHk9Jy0xMy41MTYxMTgnIHhsaW5rOmhyZWY9JyNnMy0xMDcnLz4KPHVzZSB4PScxMDIuMTQyMTgyJyB5PSctMTEuNzIyODU0JyB4bGluazpocmVmPScjZzItMTE1Jy8+Cjx1c2UgeD0nMTA2LjU1NjIzMicgeT0nLTM1LjM4NzY2NycgeGxpbms6aHJlZj0nI2cwLTExNScvPgo8cmVjdCB4PScxMTguNTExNDMxJyB5PSctMzUuODY1ODU0JyBoZWlnaHQ9Jy40NzgxODcnIHdpZHRoPScyMzEuNDE0MTY0Jy8+Cjx1c2UgeD0nMTI0LjEyMTYxOCcgeT0nLTIxLjYwMzg3NicgeGxpbms6aHJlZj0nI2czLTI1Jy8+Cjx1c2UgeD0nMTMxLjE5MDg4OCcgeT0nLTIxLjYwMzg3NicgeGxpbms6aHJlZj0nI2czLTgzJy8+Cjx1c2UgeD0nMTM4LjM5MDIyOCcgeT0nLTE5LjgxMDYxMycgeGxpbms6aHJlZj0nI2c0LTQ4Jy8+CjxyZWN0IHg9JzExOS43MDY5NDUnIHk9Jy0xNi43NDQwMDMnIGhlaWdodD0nLjQ3ODE4Nycgd2lkdGg9JzI3LjgzMDI2OCcvPgo8dXNlIHg9JzExOS43MDY5NDUnIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2c1LTUyJy8+Cjx1c2UgeD0nMTI1LjU1OTkzNScgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PScxMzAuNjcyNjU5JyB5PSctMy41MjIxOTInIHhsaW5rOmhyZWY9JyNnMi0xMTUnLz4KPHVzZSB4PScxMzUuMDg2NzA5JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnMy0zMycvPgo8dXNlIHg9JzE0Mi44MDQ5MDknIHk9Jy04Ljc2OTE2MycgeGxpbms6aHJlZj0nI2c0LTUxJy8+Cjx1c2UgeD0nMTQyLjM3NTk2JyB5PSctMi4zNTk5NCcgeGxpbms6aHJlZj0nI2cyLTExNScvPgo8dXNlIHg9JzE1MC43MjUyMjQnIHk9Jy0zMC4zNzMwNTUnIHhsaW5rOmhyZWY9JyNnMC0yMCcvPgo8dXNlIHg9JzE5OS4zNzQ5ODYnIHk9Jy0yMS42MDM4NzYnIHhsaW5rOmhyZWY9JyNnMy0xNicvPgo8dXNlIHg9JzIwNC40ODc3MTEnIHk9Jy0xOS44MTA2MTMnIHhsaW5rOmhyZWY9JyNnMi05NycvPgo8dXNlIHg9JzIwOS40ODM4NTInIHk9Jy0yMS42MDM4NzYnIHhsaW5rOmhyZWY9JyNnMy0xNicvPgo8dXNlIHg9JzIxNC41OTY1NzcnIHk9Jy0xOS44MTA2MTMnIHhsaW5rOmhyZWY9JyNnMi0xMTUnLz4KPHJlY3QgeD0nMTU4LjIzMDQzNScgeT0nLTE2Ljc0NDAwMycgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nMTAxLjkyNDcyOCcvPgo8dXNlIHg9JzE1OC4yMzA0MzUnIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2czLTE2Jy8+Cjx1c2UgeD0nMTYzLjM0MzE1OScgeT0nLTMuNTIyMTkyJyB4bGluazpocmVmPScjZzItMTEyJy8+Cjx1c2UgeD0nMTY4LjEwNDA2OScgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PScxNzMuMjE2NzkzJyB5PSctMy41MjIxOTInIHhsaW5rOmhyZWY9JyNnMi0xMTUnLz4KPHVzZSB4PScxNzcuNjMwODQzJyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnNS00MCcvPgo8dXNlIHg9JzE4Mi4xODMxNjknIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2c1LTUyJy8+Cjx1c2UgeD0nMTg4LjAzNjE1OScgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzMtMTYnLz4KPHVzZSB4PScxOTQuMDUxNzYzJyB5PSctOC43NjkxNjMnIHhsaW5rOmhyZWY9JyNnNC01MCcvPgo8dXNlIHg9JzE5My4xNDg4ODQnIHk9Jy0yLjM1OTk0JyB4bGluazpocmVmPScjZzItOTcnLz4KPHVzZSB4PScyMDEuNDQwNzQxJyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnNS00MycvPgo8dXNlIHg9JzIxMy4yMDIwNTYnIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2czLTE4Jy8+Cjx1c2UgeD0nMjE4Ljk4MjM5NycgeT0nLTguNzY5MTYzJyB4bGluazpocmVmPScjZzQtNTAnLz4KPHVzZSB4PScyMjMuNzE0NzEyJyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnNS00MScvPgo8dXNlIHg9JzIzMC45MjM3MDEnIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2c1LTQzJy8+Cjx1c2UgeD0nMjQyLjY4NTAxNicgeT0nLTUuMzE1NDU1JyB4bGluazpocmVmPScjZzMtMTMnLz4KPHVzZSB4PScyNDkuNDA3MjQ1JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnMy0xNicvPgo8dXNlIHg9JzI1NS40MjI4NDgnIHk9Jy04Ljc2OTE2MycgeGxpbms6aHJlZj0nI2c0LTUwJy8+Cjx1c2UgeD0nMjU0LjUxOTk2OScgeT0nLTIuMzU5OTQnIHhsaW5rOmhyZWY9JyNnMi05NycvPgo8dXNlIHg9JzI2Mi41NDYxOTEnIHk9Jy0yMi42ODM4MjYnIHhsaW5rOmhyZWY9JyNnNS00MCcvPgo8dXNlIHg9JzI2Ny4wOTg1MTYnIHk9Jy0yMi42ODM4MjYnIHhsaW5rOmhyZWY9JyNnMy0xNicvPgo8dXNlIHg9JzI3Mi4yMTEyNDEnIHk9Jy0yMC44OTA1NjMnIHhsaW5rOmhyZWY9JyNnMi0xMTInLz4KPHVzZSB4PScyNzYuOTcyMTUnIHk9Jy0yMi42ODM4MjYnIHhsaW5rOmhyZWY9JyNnMy0zMycvPgo8dXNlIHg9JzI4NC42OTAzNScgeT0nLTI2LjEzNzUzNCcgeGxpbms6aHJlZj0nI2c0LTUxJy8+Cjx1c2UgeD0nMjg0LjI2MTQwMScgeT0nLTE5LjcyODMxMScgeGxpbms6aHJlZj0nI2cyLTExMicvPgo8dXNlIHg9JzI5Mi4wNzkzMjgnIHk9Jy0yMi42ODM4MjYnIHhsaW5rOmhyZWY9JyNnNS00MycvPgo8dXNlIHg9JzMwMy44NDA2NDMnIHk9Jy0yMi42ODM4MjYnIHhsaW5rOmhyZWY9JyNnMy0xNicvPgo8dXNlIHg9JzMwOC45NTMzNjcnIHk9Jy0yMC44OTA1NjMnIHhsaW5rOmhyZWY9JyNnMi0xMTUnLz4KPHVzZSB4PSczMTMuMzY3NDE4JyB5PSctMjIuNjgzODI2JyB4bGluazpocmVmPScjZzMtMzMnLz4KPHVzZSB4PSczMjEuMDg1NjE3JyB5PSctMjYuMTM3NTM0JyB4bGluazpocmVmPScjZzQtNTEnLz4KPHVzZSB4PSczMjAuNjU2NjY4JyB5PSctMTkuNzI4MzExJyB4bGluazpocmVmPScjZzItMTE1Jy8+Cjx1c2UgeD0nMzI1LjgxNzkzMicgeT0nLTIyLjY4MzgyNicgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMzMwLjM3MDI1OCcgeT0nLTIyLjY4MzgyNicgeGxpbms6aHJlZj0nI2czLTMzJy8+Cjx1c2UgeD0nMzM3LjY1OTUwOScgeT0nLTIwLjg5MDU2MycgeGxpbms6aHJlZj0nI2cyLTExMicvPgo8cmVjdCB4PScyNjIuNTQ2MTkxJyB5PSctMTYuNzQ0MDAzJyBoZWlnaHQ9Jy40NzgxODcnIHdpZHRoPSc3OS44NzQxOTMnLz4KPHVzZSB4PScyODguMjc3MTA4JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnNS01MicvPgo8dXNlIHg9JzI5NC4xMzAwOTgnIHk9Jy01LjMxNTQ1NScgeGxpbms6aHJlZj0nI2czLTE2Jy8+Cjx1c2UgeD0nMjk5LjI0MjgyMicgeT0nLTMuNTIyMTkyJyB4bGluazpocmVmPScjZzItOTcnLz4KPHVzZSB4PSczMDQuMjM4OTY0JyB5PSctNS4zMTU0NTUnIHhsaW5rOmhyZWY9JyNnMy0zMycvPgo8dXNlIHg9JzMxMS45NTcxNjMnIHk9Jy04Ljc2OTE2MycgeGxpbms6aHJlZj0nI2c0LTUyJy8+Cjx1c2UgeD0nMzExLjUyODIxNScgeT0nLTIuMzU5OTQnIHhsaW5rOmhyZWY9JyNnMi05NycvPgo8dXNlIHg9JzM0My42MTU4OTcnIHk9Jy0zMC4zNzMwNTUnIHhsaW5rOmhyZWY9JyNnMC0yMScvPgo8L2c+Cjwvc3ZnPgo8IS0tIERFUFRIPTAgLS0+)
The natural frequency of the first oscillator is equal to:

The natural frequency of the secondary oscillator is equal to:

The average natural frequency of the system is equal to:

The average damping ratio of the system is equal to:

The mass ratio is equal to:

The tuning parameter of the system is equal to:

Eight uncertainties are considered in the system:
on the masses of the primary and secondary systems (
 and
and  ),
),on the spring stiffeness of the primary and secondary oscillators (
 and
and  ),
),on the damping ratios of the primary and secondary systems (
 and
and  ),
),on the loading capacity of the secondary spring (
 ),
),on the intensity of the white noise excitation (
 ).
).
We consider the following distribution fResponse of Two-Degree-of-Freedom Systems to White-Noise Base Excitation:








The failure probability is:

The value of  is:
is:

References¶
Der Kiureghian, A. and De Stefano, M. (1991). Efficient Algorithm for Second-Order Reliability Analysis, Journal of engineering mechanics, 117(12), 2904-2923
Dubourg, V., Sudret, B., Deheeger, F. (2013). Metamodel-based importance sampling for structural reliability analysis. Probabilistic Engineering Mechanics, 33, pp. 47–57
API documentation¶
- class Oscillator
Data class for the oscillator example.
- Attributes:
- dimint
dim = 8, dimension of the problem
- model
SymbolicFunction The limit state function
- muMpfloat
muMp = 1.5, mean of the mass of the primary system
- sigmaOverMuMpfloat
sigmaOverMuMp = 0.1, coefficient of variation of the mass of the primary system
- distributionMp
LogNormal Distribution of the mass of the primary system distributionMp = ot.LogNormalMuSigmaOverMu(muMp, sigmaOverMuMp).getDistribution()
- muMsfloat
muMs = 0.01, mean of the mass of the primary system
- sigmaOverMuMsfloat
sigmaOverMuMs = 0.1, coefficient of variation of the mass of the primary system
- distributionMs
LogNormal Distribution of the mass of the secondary system distributionMs = ot.LogNormalMuSigmaOverMu(muMs, sigmaOverMuMs).getDistribution()
- muKpfloat
muKp = 1, mean of the spring stiffness of the primary system
- sigmaOverMuKpfloat
sigmaOverMuKp = 0.2, coefficient of variation of the spring stiffness of the primary system
- distributionKp
LogNormal Distribution of the spring stiffness of the primary system distributionKp = ot.LogNormalMuSigmaOverMu(muKp, sigmaOverMuKp).getDistribution()
- muKsfloat
muKs = 0.01, mean of the spring stiffness of the secondary system
- sigmaOverMuKsfloat
sigmaOverMuKs = 0.2, coefficient of variation of the spring stiffness of the secondary system
- distributionKs
LogNormal Distribution of the spring stiffness of the secondary system distributionKs = ot.LogNormalMuSigmaOverMu(muKs, sigmaOverMuKs).getDistribution()
- muZetapfloat
muZetap = 0.05, mean of the damping ratio of the primary system
- sigmaOverMuZetapfloat
sigmaOverMuZetap = 0.4, coefficient of variation of the damping ratio of the primary system
- distributionZetap
LogNormal Distribution of the damping ratio of the primary system distributionZetap = ot.LogNormalMuSigmaOverMu(muZetap, sigmaOverMuZetap).getDistribution()
- muZetasfloat
muZetas = 0.02, mean of the damping ratio of the secondary system
- sigmaOverMuZetasfloat
sigmaOverMuZetas = 0.5, coefficient of variation of the damping ratio of the secondary system
- distributionZetas
LogNormal Distribution of the damping ratio of the secondary system distributionZetas = ot.LogNormalMuSigmaOverMu(muZetas, sigmaOverMuZetas).getDistribution()
- muFsfloat
muFs = 27.5, mean of the loading capacity of the secondary spring
- sigmaOverFsfloat
sigmaOverFs = 0.1, coefficient of variation of the loading capacity of the secondary spring
- distributionFs
LogNormal Distribution of the loading capacity of the secondary spring distributionFs = ot.LogNormalMuSigmaOverMu(muFs, sigmaOverFs).getDistribution()
- muS0float
muS0 = 100, mean of the intensity of the white noise
- sigmaOverS0float
sigmaOverS0 = 0.1, coefficient of variation of the intensity of the white noise
- distributionS0
LogNormal Distribution of the intensity of the white noise distributionS0 = ot.LogNormalMuSigmaOverMu(muS0, sigmaOverS0).getDistribution()
- distribution
JointDistribution The joint distribution of the input parameters
Examples
>>> from openturns.usecases import oscillator >>> # Load the oscillator >>> osc = oscillator.Oscillator()
Examples based on this use case¶
Using the FORM - SORM algorithms on a nonlinear function