Note
Go to the end to download the full example code.
RP24 analysis and 2D graphics¶
The objective of this example is to present problem 24 of the BBRC. We also present graphic elements for the visualization of the limit state surface in 2 dimensions.
import openturns as ot
import openturns.viewer as otv
import otbenchmark as otb
problem = otb.ReliabilityProblem24()
print(problem)
name = RP24
event = class=ThresholdEventImplementation antecedent=class=CompositeRandomVector function=class=Function name=Unnamed implementation=class=FunctionImplementation name=Unnamed description=[x1,x2,y0] evaluationImplementation=class=SymbolicEvaluation name=Unnamed inputVariablesNames=[x1,x2] outputVariablesNames=[y0] formulas=[2.5 - 0.2357 * (x1 - x2) + 0.00463 * (x1 + x2 - 20)^4] gradientImplementation=class=SymbolicGradient name=Unnamed evaluation=class=SymbolicEvaluation name=Unnamed inputVariablesNames=[x1,x2] outputVariablesNames=[y0] formulas=[2.5 - 0.2357 * (x1 - x2) + 0.00463 * (x1 + x2 - 20)^4] hessianImplementation=class=SymbolicHessian name=Unnamed evaluation=class=SymbolicEvaluation name=Unnamed inputVariablesNames=[x1,x2] outputVariablesNames=[y0] formulas=[2.5 - 0.2357 * (x1 - x2) + 0.00463 * (x1 + x2 - 20)^4] antecedent=class=UsualRandomVector distribution=class=JointDistribution name=JointDistribution dimension=2 copula=class=IndependentCopula name=IndependentCopula dimension=2 marginal[0]=class=Normal name=Normal dimension=1 mean=class=Point name=Unnamed dimension=1 values=[10] sigma=class=Point name=Unnamed dimension=1 values=[3] correlationMatrix=class=CorrelationMatrix dimension=1 implementation=class=MatrixImplementation name=Unnamed rows=1 columns=1 values=[1] marginal[1]=class=Normal name=Normal dimension=1 mean=class=Point name=Unnamed dimension=1 values=[10] sigma=class=Point name=Unnamed dimension=1 values=[3] correlationMatrix=class=CorrelationMatrix dimension=1 implementation=class=MatrixImplementation name=Unnamed rows=1 columns=1 values=[1] operator=class=Less name=Unnamed threshold=0
probability = 0.00286
event = problem.getEvent()
g = event.getFunction()
problem.getProbability()
0.00286
Create the Monte-Carlo algorithm
algoProb = ot.ProbabilitySimulationAlgorithm(event)
algoProb.setMaximumOuterSampling(1000)
algoProb.setMaximumCoefficientOfVariation(0.01)
algoProb.run()
Get the results
resultAlgo = algoProb.getResult()
neval = g.getEvaluationCallsNumber()
print("Number of function calls = %d" % (neval))
pf = resultAlgo.getProbabilityEstimate()
print("Failure Probability = %.4f" % (pf))
level = 0.95
c95 = resultAlgo.getConfidenceLength(level)
pmin = pf - 0.5 * c95
pmax = pf + 0.5 * c95
print("%.1f %% confidence interval :[%.4f,%.4f] " % (level * 100, pmin, pmax))
Number of function calls = 1000
Failure Probability = 0.0030
95.0 % confidence interval :[-0.0004,0.0064]
Compute the bounds of the domain¶
inputVector = event.getAntecedent()
distribution = inputVector.getDistribution()
X1 = distribution.getMarginal(0)
X2 = distribution.getMarginal(1)
alphaMin = 0.00001
alphaMax = 1 - alphaMin
lowerBound = ot.Point(
[X1.computeQuantile(alphaMin)[0], X2.computeQuantile(alphaMin)[0]]
)
upperBound = ot.Point(
[X1.computeQuantile(alphaMax)[0], X2.computeQuantile(alphaMax)[0]]
)
nbPoints = [100, 100]
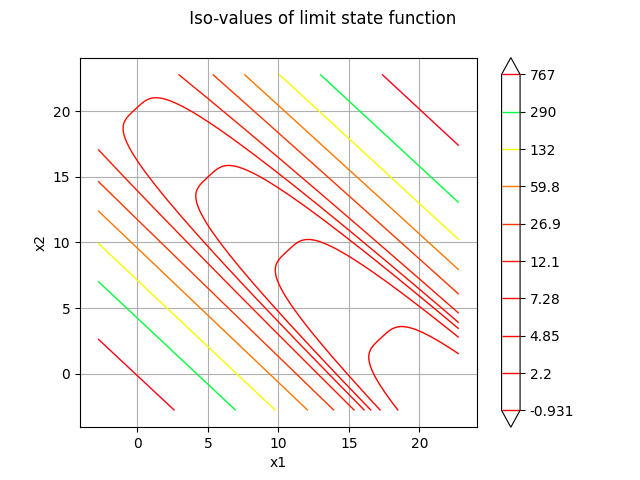
figure = g.draw(lowerBound, upperBound, nbPoints)
figure.setTitle(" Iso-values of limit state function")
_ = otv.View(figure)
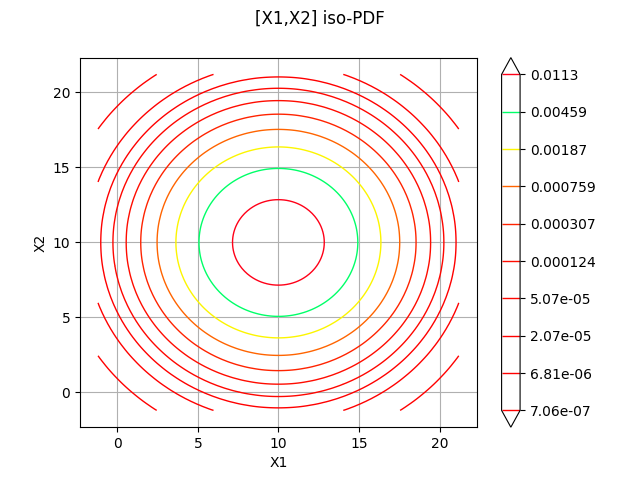
Print the iso-values of the distribution¶
_ = otv.View(distribution.drawPDF())
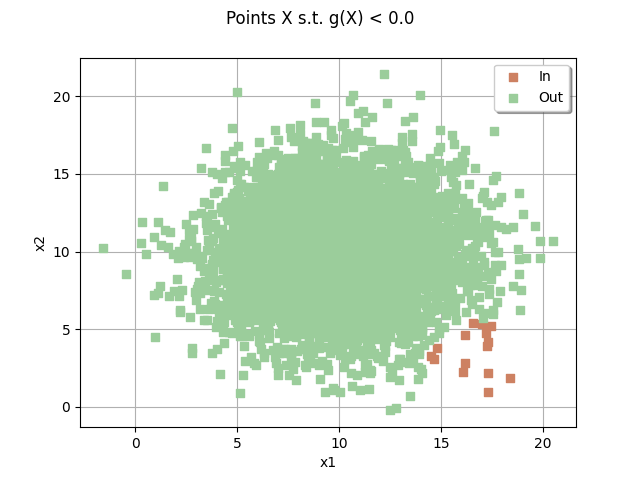
sampleSize = 5000
drawEvent = otb.DrawEvent(event)
cloud = drawEvent.drawSampleCrossCut(sampleSize)
_ = otv.View(cloud)
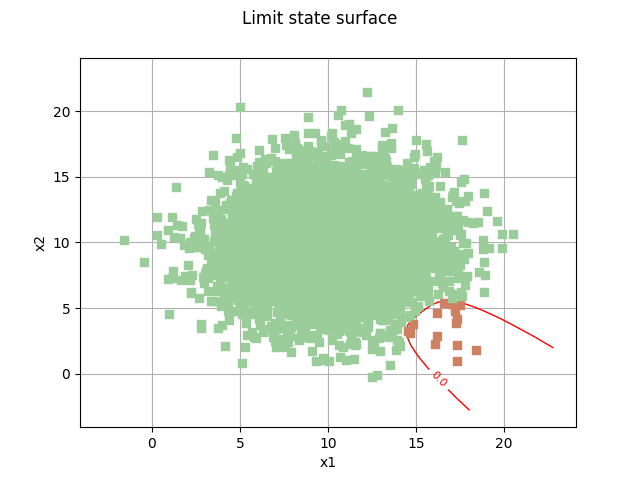
Draw the limit state surface¶
bounds = ot.Interval(lowerBound, upperBound)
graph = drawEvent.drawLimitStateCrossCut(bounds)
graph.add(cloud)
_ = otv.View(graph)
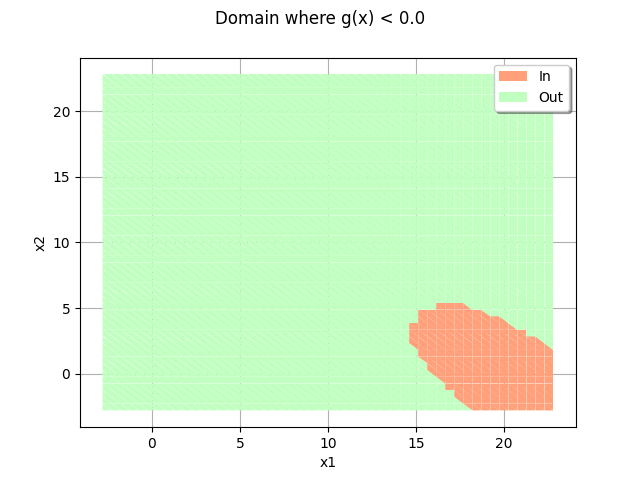
domain = drawEvent.fillEventCrossCut(bounds)
_ = otv.View(domain)
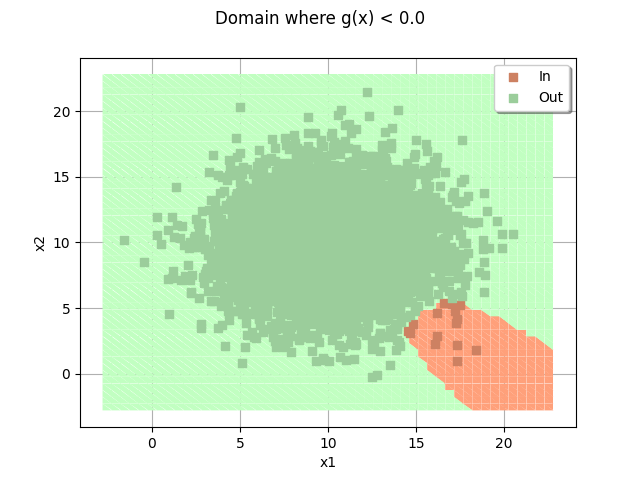
domain.add(cloud)
_ = otv.View(domain)
otv.View.ShowAll()
Total running time of the script: (0 minutes 1.804 seconds)