Note
Go to the end to download the full example code.
Application example¶
This example illustrates the way we can compute the exact intersection of cylinders defining constraints
in low dimension to get the exact representation of the global admissible set.
Let’s assume that the global parameter space is of dimension  , typically
, typically  .
Assume that this set is contained inside of a known bounding box
.
Assume that this set is contained inside of a known bounding box
![[\mathbf{a}, \mathbf{b}]](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuNiAtLT4KPHN2ZyB2ZXJzaW9uPScxLjEnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnIHdpZHRoPScyNS43NTc0NDRwdCcgaGVpZ2h0PScxMS45NTUxNjhwdCcgdmlld0JveD0nMCAtOC45NjYzNzYgMjUuNzU3NDQ0IDExLjk1NTE2OCc+CjxkZWZzPgo8cGF0aCBpZD0nZzAtOTcnIGQ9J001LjQ5OTM3Ny0zLjU3NDU5NUM1LjQ5OTM3Ny00LjY3NDQ3MSA0LjYyNjY1LTUuNDE1NjkxIDIuOTQwOTcxLTUuNDE1NjkxQzIuMjcxNDgyLTUuNDE1NjkxIC44NjA3NzItNS4zNTU5MTUgLjg2MDc3Mi00LjM1MTY4MUMuODYwNzcyLTMuODQ5NTY0IDEuMjQzMzM3LTMuNjM0MzcxIDEuNTY2MTI3LTMuNjM0MzcxQzEuOTI0NzgyLTMuNjM0MzcxIDIuMjcxNDgyLTMuODg1NDMgMi4yNzE0ODItNC4zMzk3MjZDMi4yNzE0ODItNC41NjY4NzQgMi4xODc3OTYtNC43ODIwNjcgMS45ODQ1NTgtNC45MTM1NzRDMi4zNzkwNzgtNS4wMjExNzEgMi42NjYwMDItNS4wMjExNzEgMi44OTMxNTEtNS4wMjExNzFDMy43MDYxMDItNS4wMjExNzEgNC4xOTYyNjQtNC41NjY4NzQgNC4xOTYyNjQtMy41ODY1NVYtMy4xMDgzNDRDMi4zMDczNDctMy4xMDgzNDQgLjQwNjQ3Ni0yLjU4MjMxNiAuNDA2NDc2LTEuMjU1MjkzQy40MDY0NzYtLjE2NzM3MiAxLjc5MzI3NSAuMDcxNzMxIDIuNjE4MTgyIC4wNzE3MzFDMy41Mzg3MyAuMDcxNzMxIDQuMTI0NTMzLS40MzAzODYgNC4zNjM2MzYtLjk1NjQxM0M0LjM2MzYzNi0uNTE0MDcyIDQuMzYzNjM2IDAgNS41NzExMDggMEg2LjE4MDgyMkM2LjQzMTg4IDAgNi41Mjc1MjIgMCA2LjUyNzUyMi0uMjYzMDE0QzYuNTI3NTIyLS41MTQwNzIgNi40MTk5MjUtLjUxNDA3MiA2LjI1MjU1My0uNTE0MDcyQzUuNDk5Mzc3LS41MjYwMjcgNS40OTkzNzctLjcxNzMxIDUuNDk5Mzc3LS45OTIyNzlWLTMuNTc0NTk1Wk00LjE5NjI2NC0xLjY2MTc2OEM0LjE5NjI2NC0uNTM3OTgzIDMuMTkyMDMtLjMyMjc5IDIuODA5NDY1LS4zMjI3OUMyLjIyMzY2MS0uMzIyNzkgMS43MzM0OTktLjcxNzMxIDEuNzMzNDk5LTEuMjY3MjQ4QzEuNzMzNDk5LTIuMzU1MTY4IDMuMDI0NjU4LTIuNzI1Nzc4IDQuMTk2MjY0LTIuNzg1NTU0Vi0xLjY2MTc2OFonLz4KPHBhdGggaWQ9J2cwLTk4JyBkPSdNMi40ODY2NzUtOC4yOTY4ODdMLjQxODQzMS04LjIwMTI0NVYtNy42ODcxNzNDMS4xNTk2NTEtNy42ODcxNzMgMS4yNDMzMzctNy42ODcxNzMgMS4yNDMzMzctNy4yMjA5MjJWMEgxLjc0NTQ1NUMxLjk0ODY5Mi0uMjI3MTQ4IDIuMTUxOTMtLjQ1NDI5NiAyLjM0MzIxMy0uNjkzNEMyLjk1MjkyNy0uMDU5Nzc2IDMuNjEwNDYxIC4wNzE3MzEgNC4wODg2NjcgLjA3MTczMUM1LjczODQ4MSAuMDcxNzMxIDcuMDA1NzI5LS45MzI1MDMgNy4wMDU3MjktMi42NjYwMDJDNy4wMDU3MjktNC4zMDM4NjEgNS44ODE5NDMtNS4zNzk4MjYgNC4yNDQwODUtNS4zNzk4MjZDMy41Mzg3My01LjM3OTgyNiAyLjk3NjgzNy01LjE1MjY3NyAyLjQ4NjY3NS00Ljc3MDExMlYtOC4yOTY4ODdaTTIuNTQ2NDUxLTQuMTk2MjY0QzIuOTY0ODgyLTQuNzcwMTEyIDMuNTg2NTUtNC45ODUzMDUgNC4wODg2NjctNC45ODUzMDVDNS41NzExMDgtNC45ODUzMDUgNS41NzExMDgtMy40NjY5OTkgNS41NzExMDgtMi42Nzc5NThDNS41NzExMDgtMi4xMzk5NzUgNS41NzExMDgtMS40NTg1MzEgNS4yODQxODQtMS4wMTYxODlDNC45MTM1NzQtLjQ0MjM0MSA0LjM1MTY4MS0uMzIyNzkgMy45NjkxMTYtLjMyMjc5QzMuMTU2MTY0LS4zMjI3OSAyLjcxMzgyMy0uODk2NjM4IDIuNTQ2NDUxLTEuMTU5NjUxVi00LjE5NjI2NFonLz4KPHBhdGggaWQ9J2cxLTU5JyBkPSdNMi4zMzEyNTggLjA0NzgyMUMyLjMzMTI1OC0uNjQ1NTc5IDIuMTA0MTEtMS4xNTk2NTEgMS42MTM5NDgtMS4xNTk2NTFDMS4yMzEzODItMS4xNTk2NTEgMS4wNDAxLS44NDg4MTcgMS4wNDAxLS41ODU4MDNTMS4yMTk0MjcgMCAxLjYyNTkwMyAwQzEuNzgxMzIgMCAxLjkxMjgyNy0uMDQ3ODIxIDIuMDIwNDIzLS4xNTU0MTdDMi4wNDQzMzQtLjE3OTMyOCAyLjA1NjI4OS0uMTc5MzI4IDIuMDY4MjQ0LS4xNzkzMjhDMi4wOTIxNTQtLjE3OTMyOCAyLjA5MjE1NC0uMDExOTU1IDIuMDkyMTU0IC4wNDc4MjFDMi4wOTIxNTQgLjQ0MjM0MSAyLjAyMDQyMyAxLjIxOTQyNyAxLjMyNzAyNCAxLjk5NjUxM0MxLjE5NTUxNyAyLjEzOTk3NSAxLjE5NTUxNyAyLjE2Mzg4NSAxLjE5NTUxNyAyLjE4Nzc5NkMxLjE5NTUxNyAyLjI0NzU3MiAxLjI1NTI5MyAyLjMwNzM0NyAxLjMxNTA2OCAyLjMwNzM0N0MxLjQxMDcxIDIuMzA3MzQ3IDIuMzMxMjU4IDEuNDIyNjY1IDIuMzMxMjU4IC4wNDc4MjFaJy8+CjxwYXRoIGlkPSdnMi05MScgZD0nTTIuOTg4NzkyIDIuOTg4NzkyVjIuNTQ2NDUxSDEuODI5MTQxVi04LjUyNDAzNUgyLjk4ODc5MlYtOC45NjYzNzZIMS4zODY4VjIuOTg4NzkySDIuOTg4NzkyWicvPgo8cGF0aCBpZD0nZzItOTMnIGQ9J00xLjg1MzA1MS04Ljk2NjM3NkguMjUxMDU5Vi04LjUyNDAzNUgxLjQxMDcxVjIuNTQ2NDUxSC4yNTEwNTlWMi45ODg3OTJIMS44NTMwNTFWLTguOTY2Mzc2WicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMCcgeT0nMCcgeGxpbms6aHJlZj0nI2cyLTkxJy8+Cjx1c2UgeD0nMy4yNTE2NjEnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC05NycvPgo8dXNlIHg9JzkuNzg5NjQ0JyB5PScwJyB4bGluazpocmVmPScjZzEtNTknLz4KPHVzZSB4PScxNS4wMzM4MDMnIHk9JzAnIHhsaW5rOmhyZWY9JyNnMC05OCcvPgo8dXNlIHg9JzIyLjUwNTc4MycgeT0nMCcgeGxpbms6aHJlZj0nI2cyLTkzJy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9NCAtLT4=) , and that a point
, and that a point  in
in  is admissible
if and only if it satisfies a set of constraints
is admissible
if and only if it satisfies a set of constraints  ,
where each of the
,
where each of the  acts only on a low dimensional part
acts only on a low dimensional part
 of .
The constraints are defined using one of the following options:
of .
The constraints are defined using one of the following options:
The point
must be inside of the convex hull of a set of points in arbitrary dimension;
The point
The point
The point
such that for a component
.
In all these cases, the resulting constraint define a cylinder whose base is given
by a mesh in  and whose extention is an interval in
and whose extention is an interval in  :
it is the cartesian product of both objects, with an injection
:
it is the cartesian product of both objects, with an injection  telling where the components
of are positioned into the components of .
telling where the components
of are positioned into the components of .
import math as m
import openturns as ot
import openturns.viewer as otv
import otmeshing as otm
from time import time
ot.RandomGenerator.Reset()
We define a set in  as the intersection of several constraints acting in
as the intersection of several constraints acting in  Here is the global bounding box
Here is the global bounding box
a = [-4.0] * 3
b = [4.0] * 3
Algorithm used for all the intersection computation
algoInter = otm.IntersectionMesher()
Algorithm used for all the convex decomposition computation We force the use of simplices decomposition to avoid a bug in the 3D convex decomposition (which is correct but awfully slow)
algoDecomp = otm.ConvexDecompositionMesher()
algoDecomp.setUseSimplicesDecomposition(True)
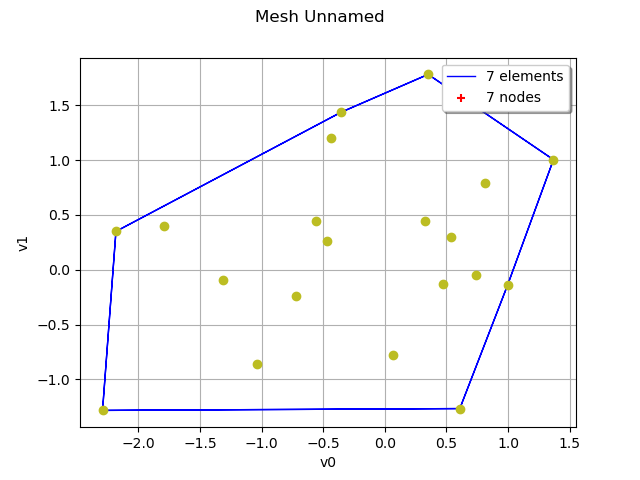
Define the first constraint  as the interior of the convex hull of a set of points in 2D
acts on
as the interior of the convex hull of a set of points in 2D
acts on 
points1 = ot.Normal(2).getSample(20)
# use ConvexHullMesher to exclude internal points
hull1 = otm.ConvexHullMesher().build(points1).getVertices()
base1 = otm.CloudMesher().build(hull1)
base1.setName(r"$C_1$")
base1.setDescription([r"$x_0$", r"$x_1$"])
extension1 = ot.Interval(a[2], b[2])
injection1 = [2]
N1 = 1
C_1 = otm.Cylinder(base1, extension1, injection1, N1)
ot.BoundaryMesher().build(C_1.computeMesh()).exportToVTKFile("C_1.vtk")
g1 = ot.BoundaryMesher().build(base1).draw()
cloud = ot.Cloud(points1)
cloud.setPointStyle("fcircle")
g11 = ot.Graph(g1)
g11.add(cloud)
g11
view = otv.View(g11)
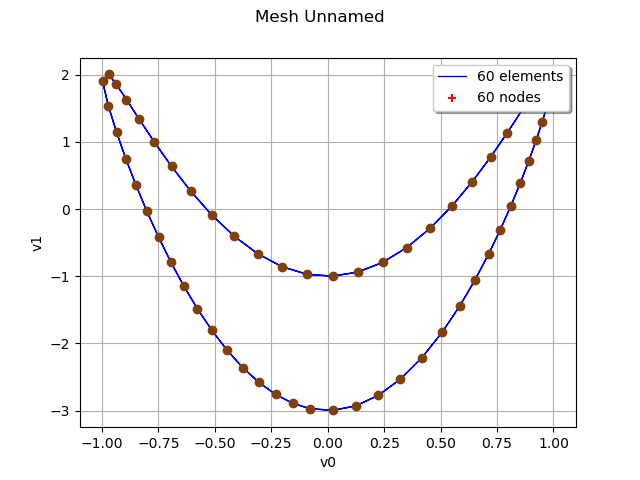
Define  as being inside of a polygon given by the vertices of its boundary
It acts on
as being inside of a polygon given by the vertices of its boundary
It acts on 
t = 0.0
dt = 1e-6
eps = 2e-1
points2 = [ot.Point([1, 2])]
# [cos(t), sin(t)+2cos(2t), t=0..2pi]
while t + dt < 2 * m.pi:
p = ot.Point([m.cos(t + dt), m.sin(t + dt) + 2 * m.cos(2 * (t + dt))])
dp = (p - points2[-1]).norm()
while dp < 0.5 * eps:
dt *= 1.1
p = ot.Point([m.cos(t + dt), m.sin(t + dt) + 2 * m.cos(2 * (t + dt))])
dp = (p - points2[-1]).norm()
while dp > 2.0 * eps:
dt /= 1.1
p = ot.Point([m.cos(t + dt), m.sin(t + dt) + 2 * m.cos(2 * (t + dt))])
dp = (p - points2[-1]).norm()
points2.append(p)
t += dt
base2 = otm.PolygonMesher().build(points2)
base2.setName(r"$C_2$")
base2.setDescription([r"$x_0$", r"$x_2$"])
extension2 = ot.Interval(a[1], b[1])
injection2 = [1]
N2 = 1
C_2 = otm.Cylinder(base2, extension2, injection2, N2)
ot.BoundaryMesher().build(C_2.computeMesh()).exportToVTKFile("C_2.vtk")
g2 = ot.BoundaryMesher().build(base2).draw()
cloud = ot.Cloud(points2)
cloud.setPointStyle("fcircle")
g22 = ot.Graph(g2)
g22.add(cloud)
g22
view = otv.View(g22)
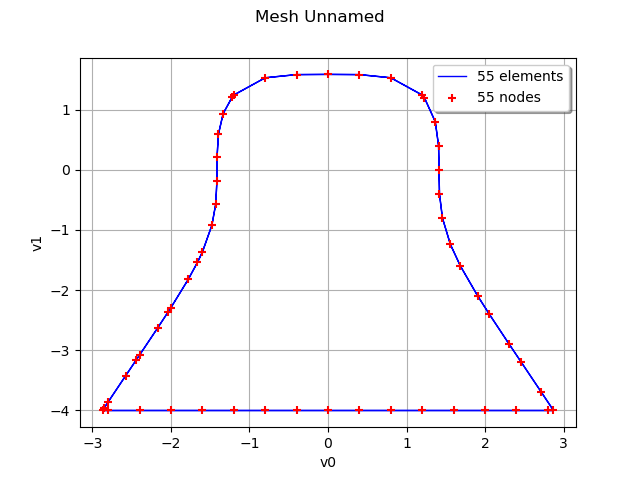
Define  as being inside of a mesh built with LevelSetMesher
It acts on
as being inside of a mesh built with LevelSetMesher
It acts on 
f3 = ot.SymbolicFunction(["x1", "x2"], ["x1^4+x2^3"])
level3 = ot.LevelSet(f3, ot.LessOrEqual(), 4.0)
n3 = 20
base3 = ot.LevelSetMesher([n3] * 2).build(level3, ot.Interval([a[1], a[2]], [b[1], b[2]]))
base3.setName(r"$C_3$")
base3.setDescription([r"$x_1$", r"$x_2$"])
extension3 = ot.Interval(a[0], b[0])
injection3 = [0]
N3 = 1
C_3 = otm.Cylinder(base3, extension3, injection3, N3)
ot.BoundaryMesher().build(C_3.computeMesh()).exportToVTKFile("C_3.vtk")
g3 = ot.BoundaryMesher().build(base3).draw()
g3
view = otv.View(g3)
Now the admissible domain
meshAllCylinders = algoInter.buildCylinder([C_1, C_2, C_3])
ot.BoundaryMesher().build(meshAllCylinders).exportToVTKFile("cylindersIntersection.vtk")
meshAllCylindersConvexParts = algoDecomp.build(meshAllCylinders)
print("Number of convex parts=", len(meshAllCylindersConvexParts))
Number of convex parts= 5051
Create a uniform distribution over mesh and sample it
distribution = ot.UniformOverMesh(meshAllCylinders)
size = 1000
sample = distribution.getSample(size)
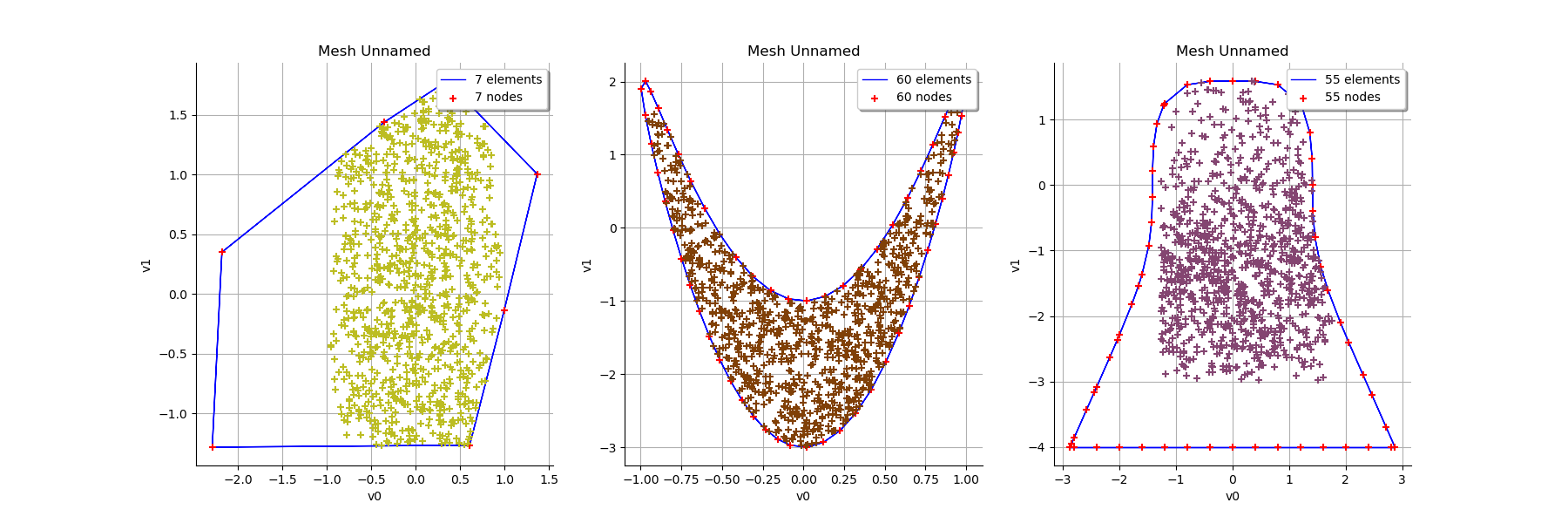
Check if all the constraints are satisfied
grid = ot.GridLayout(1, 3)
g1c = ot.Graph(g1)
g1c.add(ot.Cloud(sample.getMarginal([0, 1])))
grid.setGraph(0, 0, g1c)
g2c = ot.Graph(g2)
g2c.add(ot.Cloud(sample.getMarginal([0, 2])))
grid.setGraph(0, 1, g2c)
g3c = ot.Graph(g3)
g3c.add(ot.Cloud(sample.getMarginal([1, 2])))
grid.setGraph(0, 2, g3c)
grid
view = otv.View(grid)
f = ot.SymbolicFunction(["x0", "x1"], ["1+2*cos(pi_*x0/2)*sin(pi_*x1/2)^2"])
f.setName("Paraboloid")
f.setInputDescription([r"$x_0$", r"$x_1$"])
f.setOutputDescription([r"$x_2$"])
inputInterval = ot.Interval([a[0], a[1]], [b[0], b[1]])
inputDiscretization = [41] * 2
outputDimension = 2
outputDiscretization = 1
mesher = otm.FunctionGraphMesher(inputInterval, inputDiscretization)
mesh = mesher.build(f, outputDimension, a[2], b[2], 1)
ot.BoundaryMesher().build(mesh).exportToVTKFile("func_graph.vtk")
meshConvexParts = algoDecomp.build(mesh)
print("Number of convex parts=", len(meshConvexParts))
Number of convex parts= 10086
t0 = time()
globalMesh = algoInter.build([mesh, meshAllCylinders])
t1 = time()
ot.BoundaryMesher().build(globalMesh).exportToVTKFile("global.vtk")
print("t=", t1 - t0, "s")
t= 39.3065767288208 s
Create a uniform distribution over mesh and sample it
distribution = ot.UniformOverMesh(globalMesh)
size = 100000
sample = distribution.getSample(size)
ot.Mesh(sample).exportToVTKFile("Global_sample.vtk")
# Extract only the 1000 first points to check things in 2D
sample = sample[:1000]
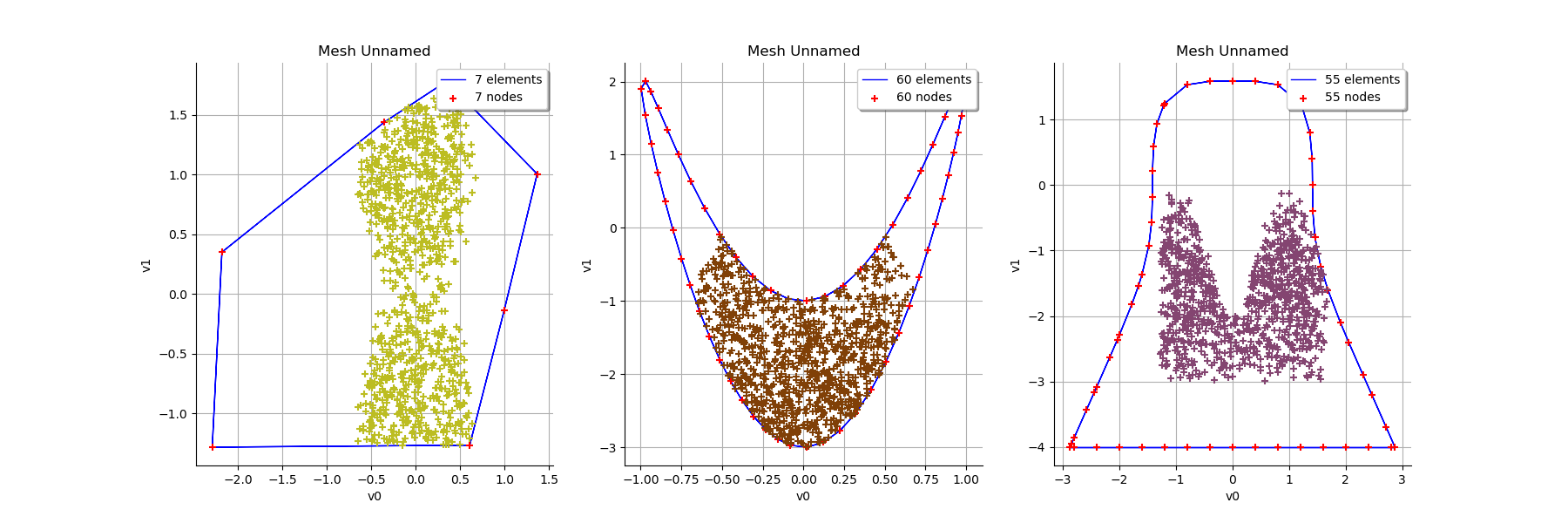
# Check if all the constraints are satisfied
grid = ot.GridLayout(1, 3)
g1g = ot.Graph(g1)
g1g.add(ot.Cloud(sample.getMarginal([0, 1])))
grid.setGraph(0, 0, g1g)
g2g = ot.Graph(g2)
g2g.add(ot.Cloud(sample.getMarginal([0, 2])))
grid.setGraph(0, 1, g2g)
g3g = ot.Graph(g3)
g3g.add(ot.Cloud(sample.getMarginal([1, 2])))
grid.setGraph(0, 2, g3g)
grid
view = otv.View(grid)