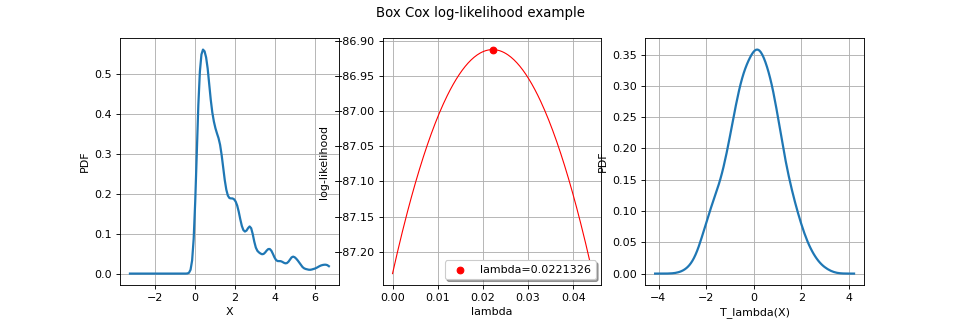
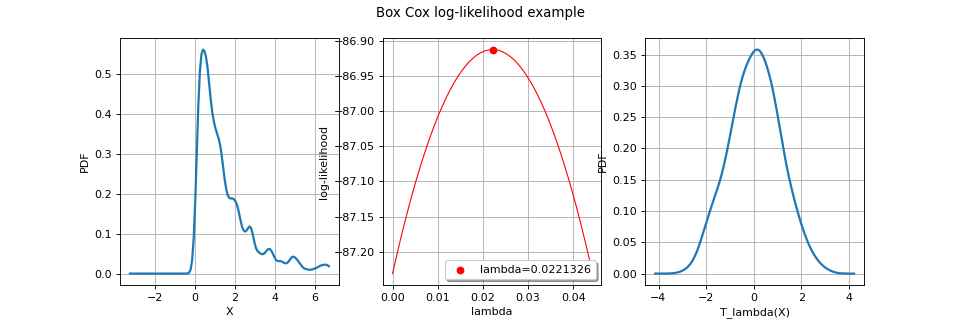
BoxCoxFactory¶
(Source code, png)
{kind=link}
- class BoxCoxFactory(*args)¶
BoxCox transformation estimator.
Methods
build(*args)Estimate the Box Cox transformation.
buildWithGLM(*args)Estimate the Box Cox transformation with general linear model.
buildWithGraph(*args)Estimate the Box Cox transformation with graph output.
buildWithLM(*args)Estimate the Box Cox transformation with linear model.
Accessor to the object's name.
getName()Accessor to the object's name.
Accessor to the solver.
hasName()Test if the object is named.
setName(name)Accessor to the object's name.
setOptimizationAlgorithm(solver)Accessor to the solver.
Notes
The class
BoxCoxFactoryenables to build a Box Cox transformation from data.The Box Cox transformation
 maps a sample into a new sample following a normal distribution with independent components. That sample may be the realization of a process as well as the realization of a distribution.
maps a sample into a new sample following a normal distribution with independent components. That sample may be the realization of a process as well as the realization of a distribution.In the multivariate case, we proceed component by component:
 which writes:
which writes:
for all
 .
.BoxCox transformation could also be performed in the case of the estimation of a general linear model through
GeneralLinearModelAlgorithm. The objective is to estimate the most likely surrogate model (general linear model) which links input data and
and  .
.  are to be calibrated such as maximizing the general linear model’s likelihood function. In that context, a
are to be calibrated such as maximizing the general linear model’s likelihood function. In that context, a CovarianceModeland aBasishave to be fixed- __init__(*args)¶
- build(*args)¶
Estimate the Box Cox transformation.
- Parameters:
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- transform
Notes
We describe the estimation in the univariate case, in the case of no surrogate model estimate. Only the parameter
 is estimated. To clarify the notations, we omit the mention of
is estimated. To clarify the notations, we omit the mention of  in
in  .
.We note
 a sample of
a sample of  . We suppose that
. We suppose that  .
.The parameters
 are estimated by the maximum likelihood estimators. We note
are estimated by the maximum likelihood estimators. We note  and
and  respectively the cumulative distribution function and the density probability function of the
respectively the cumulative distribution function and the density probability function of the  distribution.
distribution.We have :

from which we derive the density probability function p of
:
which enables to write the likelihood of the values
:![\begin{array}{lcl}
L(\beta,\sigma,\lambda)
& = &
\underbrace{ \frac{1}{(2\pi)^{N/2}}
\times
\frac{1}{(\sigma^2)^{N/2}}
\times
\exp\left[
-\frac{1}{2\sigma^2}
\sum_{k=0}^{N-1}
\left(
h_\lambda(x_k)-\beta
\right)^2
\right]
}_{\Psi(\beta, \sigma)}
\times
\prod_{k=0}^{N-1} x_k^{\lambda - 1}
\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuNC4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzQwNy45MzI5NTFwdCcgaGVpZ2h0PSc1My41OTQ4MDNwdCcgdmlld0JveD0nNC45ODEzMzUgLTU0Ljc5MDMxNyA0MDcuOTMyOTUxIDUzLjU5NDgwMyc+CjxkZWZzPgo8cGF0aCBpZD0nZzAtMzQnIGQ9J00zLjI4NzY3MSAzNS4zNzUzNDJINi44MjY0MDFWMzQuNjM0MTIySDQuMDI4ODkyVi4yNjMwMTRINi44MjY0MDFWLS40NzgyMDdIMy4yODc2NzFWMzUuMzc1MzQyWicvPgo8cGF0aCBpZD0nZzAtMzUnIGQ9J00yLjkyOTAxNiAzNC42MzQxMjJILjEzMTUwN1YzNS4zNzUzNDJIMy42NzAyMzdWLS40NzgyMDdILjEzMTUwN1YuMjYzMDE0SDIuOTI5MDE2VjM0LjYzNDEyMlonLz4KPHBhdGggaWQ9J2cwLTgxJyBkPSdNNC4yOTE5MDUgMTEuOTU1MTY4VjExLjQ3Njk2MUMzLjA2MDUyMyAxMS40NzY5NjEgMy4wNjA1MjMgMTAuODkxMTU4IDMuMDYwNTIzIDEwLjUzMjUwM1YuNDc4MjA3SDguMjEzMlYxMC41MzI1MDNDOC4yMTMyIDEwLjg5MTE1OCA4LjIxMzIgMTEuNDc2OTYxIDYuOTgxODE4IDExLjQ3Njk2MVYxMS45NTUxNjhIMTAuNjA0MjM0VjExLjQ3Njk2MUM5LjM3Mjg1MiAxMS40NzY5NjEgOS4zNzI4NTIgMTAuODkxMTU4IDkuMzcyODUyIDEwLjUzMjUwM1YxLjQyMjY2NUM5LjM3Mjg1MiAxLjA2NDAxIDkuMzcyODUyIC40NzgyMDcgMTAuNjA0MjM0IC40NzgyMDdWMEguNjY5NDg5Vi40NzgyMDdDMS45MDA4NzIgLjQ3ODIwNyAxLjkwMDg3MiAxLjA2NDAxIDEuOTAwODcyIDEuNDIyNjY1VjEwLjUzMjUwM0MxLjkwMDg3MiAxMC44OTExNTggMS45MDA4NzIgMTEuNDc2OTYxIC42Njk0ODkgMTEuNDc2OTYxVjExLjk1NTE2OEg0LjI5MTkwNVonLz4KPHBhdGggaWQ9J2cwLTg4JyBkPSdNMTUuMTM1MjQzIDE2LjczNzIzNUwxNi41ODE4MTggMTIuOTExNTgySDE2LjI4MjkzOUMxNS44MTY2ODcgMTQuMTU0OTE5IDE0LjU0OTQ0IDE0Ljk2Nzg3IDEzLjE3NDU5NSAxNS4zMjY1MjZDMTIuOTIzNTM3IDE1LjM4NjMwMSAxMS43NTE5MyAxNS42OTcxMzYgOS40NTY1MzggMTUuNjk3MTM2SDIuMjQ3NTcyTDguMzMyNzUyIDguNTU5OUM4LjQxNjQzOCA4LjQ2NDI1OSA4LjQ0MDM0OSA4LjQyODM5NCA4LjQ0MDM0OSA4LjM2ODYxOEM4LjQ0MDM0OSA4LjM0NDcwNyA4LjQ0MDM0OSA4LjMwODg0MiA4LjM1NjY2MyA4LjE4OTI5TDIuNzg1NTU0IC41NzM4NDhIOS4zMzY5ODZDMTAuOTM4OTc5IC41NzM4NDggMTIuMDI2ODk5IC43NDEyMiAxMi4xMzQ0OTYgLjc2NTEzMUMxMi43ODAwNzUgLjg2MDc3MiAxMy44MjAxNzQgMS4wNjQwMSAxNC43NjQ2MzMgMS42NjE3NjhDMTUuMDYzNTEyIDEuODUzMDUxIDE1Ljg3NjQ2MyAyLjM5MTAzNCAxNi4yODI5MzkgMy4zNTk0MDJIMTYuNTgxODE4TDE1LjEzNTI0MyAwSDEuMDA0MjM0Qy43MjkyNjUgMCAuNzE3MzEgLjAxMTk1NSAuNjgxNDQ1IC4wODM2ODZDLjY2OTQ4OSAuMTE5NTUyIC42Njk0ODkgLjM0NjcgLjY2OTQ4OSAuNDc4MjA3TDYuOTkzNzczIDkuMTMzNzQ4TC44MDA5OTYgMTYuMzkwNTM1Qy42ODE0NDUgMTYuNTMzOTk4IC42ODE0NDUgMTYuNTkzNzczIC42ODE0NDUgMTYuNjA1NzI5Qy42ODE0NDUgMTYuNzM3MjM1IC43ODkwNDEgMTYuNzM3MjM1IDEuMDA0MjM0IDE2LjczNzIzNUgxNS4xMzUyNDNaJy8+CjxwYXRoIGlkPSdnMC0xMjInIGQ9J001LjQ5OTM3Ny0xLjA5OTg3NUM1LjQ5OTM3Ny0xLjQyMjY2NSA1LjQ5OTM3Ny0xLjQzNDYyIDUuMjQ4MzE5LTEuNDM0NjJDNC4wMjg4OTItMS40MzQ2MiAxLjMzODk3OS0uODYwNzcyLS4yODY5MjQgMi4wNTYyODlWMi4yNDc1NzJDLS4yODY5MjQgMi41NDY0NTEtLjI3NDk2OSAyLjU1ODQwNiAwIDIuNTU4NDA2Qy4yMjcxNDggMi41NTg0MDYgLjIzOTEwMyAyLjU0NjQ1MSAuMjk4ODc5IDIuNDYyNzY1QzEuMjc5MjAzIC44OTY2MzggMi45MjkwMTYgLjA0NzgyMSA1LjM1NTkxNSAwQzUuNDk5Mzc3IDAgNS40OTkzNzctLjA4MzY4NiA1LjQ5OTM3Ny0uMzM0NzQ1Vi0xLjA5OTg3NVonLz4KPHBhdGggaWQ9J2cwLTEyMycgZD0nTTUuNjY2NzUgMi4wNTYyODlDNC4wNDA4NDctLjg3MjcyNyAxLjM1MDkzNC0xLjQzNDYyIC4xMzE1MDctMS40MzQ2MkMtLjExOTU1Mi0xLjQzNDYyLS4xMTk1NTItMS40MjI2NjUtLjExOTU1Mi0xLjA5OTg3NVYtLjMzNDc0NUMtLjExOTU1Mi0uMDU5Nzc2LS4xMTk1NTIgMCAuMDQ3ODIxIDBDLjc3NzA4NiAuMDExOTU1IDEuOTYwNjQ4IC4xMDc1OTcgMy4wMzY2MTMgLjYzMzYyNEM0LjMyNzc3MSAxLjI3OTIwMyA0LjgxNzkzMyAyLjAzMjM3OSA1LjExNjgxMiAyLjQ5ODYzQzUuMTUyNjc3IDIuNTU4NDA2IDUuMjI0NDA4IDIuNTU4NDA2IDUuMzc5ODI2IDIuNTU4NDA2QzUuNjU0Nzk1IDIuNTU4NDA2IDUuNjY2NzUgMi41NDY0NTEgNS42NjY3NSAyLjI0NzU3MlYyLjA1NjI4OVonLz4KPHBhdGggaWQ9J2cwLTEyNCcgZD0nTTUuNDk5Mzc3LTEuMDk5ODc1QzUuNDk5Mzc3LTEuMzc0ODQ0IDUuNDk5Mzc3LTEuNDM0NjIgNS4zMzIwMDUtMS40MzQ2MkM0LjYwMjc0LTEuNDQ2NTc1IDMuNDE5MTc4LTEuNTQyMjE3IDIuMzQzMjEzLTIuMDY4MjQ0QzEuMDUyMDU1LTIuNzEzODIzIC41NjE4OTMtMy40NjY5OTkgLjI2MzAxNC0zLjkzMzI1Qy4yMjcxNDgtMy45OTMwMjYgLjE1NTQxNy0zLjk5MzAyNiAwLTMuOTkzMDI2Qy0uMjc0OTY5LTMuOTkzMDI2LS4yODY5MjQtMy45ODEwNzEtLjI4NjkyNC0zLjY4MjE5MlYtMy40OTA5MDlDMS4zMzg5NzktLjU2MTg5MyA0LjAyODg5MiAwIDUuMjQ4MzE5IDBDNS40OTkzNzcgMCA1LjQ5OTM3Ny0uMDExOTU1IDUuNDk5Mzc3LS4zMzQ3NDVWLTEuMDk5ODc1WicvPgo8cGF0aCBpZD0nZzAtMTI1JyBkPSdNNS42NjY3NS0zLjY4MjE5MkM1LjY2Njc1LTMuOTgxMDcxIDUuNjU0Nzk1LTMuOTkzMDI2IDUuMzc5ODI2LTMuOTkzMDI2QzUuMTUyNjc3LTMuOTkzMDI2IDUuMTQwNzIyLTMuOTgxMDcxIDUuMDgwOTQ2LTMuODk3Mzg1QzQuMTAwNjIzLTIuMzMxMjU4IDIuNDUwODA5LTEuNDgyNDQxIC4wMjM5MS0xLjQzNDYyQy0uMTE5NTUyLTEuNDM0NjItLjExOTU1Mi0xLjM1MDkzNC0uMTE5NTUyLTEuMDk5ODc1Vi0uMzM0NzQ1Qy0uMTE5NTUyLS4wMTE5NTUtLjExOTU1MiAwIC4xMzE1MDcgMEMxLjM1MDkzNCAwIDQuMDQwODQ3LS41NzM4NDggNS42NjY3NS0zLjQ5MDkwOVYtMy42ODIxOTJaJy8+CjxwYXRoIGlkPSdnMi0wJyBkPSdNNy44Nzg0NTYtMi43NDk2ODlDOC4wODE2OTQtMi43NDk2ODkgOC4yOTY4ODctMi43NDk2ODkgOC4yOTY4ODctMi45ODg3OTJTOC4wODE2OTQtMy4yMjc4OTUgNy44Nzg0NTYtMy4yMjc4OTVIMS40MTA3MUMxLjIwNzQ3Mi0zLjIyNzg5NSAuOTkyMjc5LTMuMjI3ODk1IC45OTIyNzktMi45ODg3OTJTMS4yMDc0NzItMi43NDk2ODkgMS40MTA3MS0yLjc0OTY4OUg3Ljg3ODQ1NlonLz4KPHBhdGggaWQ9J2cyLTInIGQ9J000LjY1MDU2LTMuMzIzNTM3TDIuMjU5NTI3LTUuNzAyNjE1QzIuMTE2MDY1LTUuODQ2MDc3IDIuMDkyMTU0LTUuODY5OTg4IDEuOTk2NTEzLTUuODY5OTg4QzEuODc2OTYxLTUuODY5OTg4IDEuNzU3NDEtNS43NjIzOTEgMS43NTc0MS01LjYzMDg4NEMxLjc1NzQxLTUuNTQ3MTk4IDEuNzgxMzItNS41MjMyODggMS45MTI4MjctNS4zOTE3ODFMNC4zMDM4NjEtMi45ODg3OTJMMS45MTI4MjctLjU4NTgwM0MxLjc4MTMyLS40NTQyOTYgMS43NTc0MS0uNDMwMzg2IDEuNzU3NDEtLjM0NjdDMS43NTc0MS0uMjE1MTkzIDEuODc2OTYxLS4xMDc1OTcgMS45OTY1MTMtLjEwNzU5N0MyLjA5MjE1NC0uMTA3NTk3IDIuMTE2MDY1LS4xMzE1MDcgMi4yNTk1MjctLjI3NDk2OUw0LjYzODYwNS0yLjY1NDA0N0w3LjExMzMyNS0uMTc5MzI4QzcuMTM3MjM1LS4xNjczNzIgNy4yMjA5MjItLjEwNzU5NyA3LjI5MjY1My0uMTA3NTk3QzcuNDM2MTE1LS4xMDc1OTcgNy41MzE3NTYtLjIxNTE5MyA3LjUzMTc1Ni0uMzQ2N0M3LjUzMTc1Ni0uMzcwNjEgNy41MzE3NTYtLjQxODQzMSA3LjQ5NTg5LS40NzgyMDdDNy40ODM5MzUtLjUwMjExNyA1LjU4MzA2NC0yLjM3OTA3OCA0Ljk4NTMwNS0yLjk4ODc5Mkw3LjE3MzEwMS01LjE3NjU4OEM3LjIzMjg3Ny01LjI0ODMxOSA3LjQxMjIwNC01LjQwMzczNiA3LjQ3MTk4LTUuNDc1NDY3QzcuNDgzOTM1LTUuNDk5Mzc3IDcuNTMxNzU2LTUuNTQ3MTk4IDcuNTMxNzU2LTUuNjMwODg0QzcuNTMxNzU2LTUuNzYyMzkxIDcuNDM2MTE1LTUuODY5OTg4IDcuMjkyNjUzLTUuODY5OTg4QzcuMTk3MDExLTUuODY5OTg4IDcuMTQ5MTkxLTUuODIyMTY3IDcuMDE3Njg0LTUuNjkwNjZMNC42NTA1Ni0zLjMyMzUzN1onLz4KPHBhdGggaWQ9J2c1LTknIGQ9J00zLjYwMjQ5MS00Ljc5MDAzN0MzLjYwMjQ5MS01LjA2ODk5MSAzLjYwMjQ5MS01LjE4MDU3MyA0LjM1MTY4MS01LjE4MDU3M0g0LjYwNjcyNVYtNS40NDM1ODdDNC4yNDgwNy01LjQxOTY3NiAzLjY1MDMxMS01LjQxOTY3NiAzLjI2Nzc0Ni01LjQxOTY3NlMyLjI3OTQ1Mi01LjQxOTY3NiAxLjkyMDc5Ny01LjQ0MzU4N1YtNS4xODA1NzNIMi4xNzU4NDFDMi45MjUwMzEtNS4xODA1NzMgMi45MjUwMzEtNS4wNjg5OTEgMi45MjUwMzEtNC43OTAwMzdWLTEuMzM4OTc5QzEuNzkzMjc1LTEuNTk0MDIyIDEuNzUzNDI1LTIuNzgxNTY5IDEuNzUzNDI1LTMuMzIzNTM3QzEuNzUzNDI1LTMuOTEzMzI1IDEuNTM4MjMyLTQuNDIzNDEyIC45NzIzNTQtNC40MjM0MTJILjcwMTM3Qy41ODE4MTgtNC40MjM0MTIgLjQ3MDIzNy00LjQyMzQxMiAuNDcwMjM3LTQuMzExODMxQy40NzAyMzctNC4yMTYxODkgLjU2NTg3OC00LjIwMDI0OSAuNTg5Nzg4LTQuMjAwMjQ5QzEuMDY3OTk1LTQuMTQ0NDU4IDEuMDc1OTY1LTMuNDE5MTc4IDEuMDc1OTY1LTMuMzU1NDE3QzEuMDc1OTY1LTIuODg1MTgxIDEuMDkxOTA1LTEuMzA3MDk4IDIuOTI1MDMxLTEuMDkxOTA1Vi0uNjUzNTQ5QzIuOTI1MDMxLS4zNzQ1OTUgMi45MjUwMzEtLjI2MzAxNCAyLjE3NTg0MS0uMjYzMDE0SDEuOTIwNzk3VjBDMi4yNzk0NTItLjAyMzkxIDIuODc3MjEtLjAyMzkxIDMuMjU5Nzc2LS4wMjM5MVM0LjI0ODA3LS4wMjM5MSA0LjYwNjcyNSAwVi0uMjYzMDE0SDQuMzUxNjgxQzMuNjAyNDkxLS4yNjMwMTQgMy42MDI0OTEtLjM3NDU5NSAzLjYwMjQ5MS0uNjUzNTQ5Vi0xLjA5MTkwNUM1LjI0NDMzNC0xLjI1OTI3OCA1LjQ5MTQwNy0yLjU3NDM0NiA1LjQ5OTM3Ny0zLjE0MDIyNEM1LjQ5OTM3Ny0zLjQ2Njk5OSA1LjUwNzM0Ny00LjEzNjQ4OCA1Ljk2MTY0NC00LjIwMDI0OUM2LjAyNTQwNS00LjIwODIxOSA2LjEwNTEwNi00LjIxNjE4OSA2LjEwNTEwNi00LjMxMTgzMUM2LjEwNTEwNi00LjQyMzQxMiA2LjAwMTQ5NC00LjQyMzQxMiA1Ljg4MTk0My00LjQyMzQxMkg1LjYwMjk4OUM1LjAyMTE3MS00LjQyMzQxMiA0LjgyOTg4OC0zLjkzNzIzNSA0LjgyMTkxOC0zLjE4MDA3NUM0LjgxMzk0OC0yLjQzODg1NCA0LjU2Njg3NC0xLjUzMDI2MiAzLjYwMjQ5MS0xLjMzMTAwOVYtNC43OTAwMzdaJy8+CjxwYXRoIGlkPSdnNS00MCcgZD0nTTIuNjU0MDQ3IDEuOTkyNTI4QzIuNzE3ODA4IDEuOTkyNTI4IDIuODEzNDUgMS45OTI1MjggMi44MTM0NSAxLjg5Njg4N0MyLjgxMzQ1IDEuODY1MDA2IDIuODA1NDc5IDEuODU3MDM2IDIuNzAxODY4IDEuNzUzNDI1QzEuNjA5OTYzIC43MjUyOCAxLjMzODk3OS0uNzU3MTYxIDEuMzM4OTc5LTEuOTkyNTI4QzEuMzM4OTc5LTQuMjg3OTIgMi4yODc0MjItNS4zNjM4ODUgMi42OTM4OTgtNS43MzA1MTFDMi44MDU0NzktNS44MzQxMjIgMi44MTM0NS01Ljg0MjA5MiAyLjgxMzQ1LTUuODgxOTQzUzIuNzgxNTY5LTUuOTc3NTg0IDIuNzAxODY4LTUuOTc3NTg0QzIuNTc0MzQ2LTUuOTc3NTg0IDIuMTc1ODQxLTUuNTcxMTA4IDIuMTEyMDgtNS40OTkzNzdDMS4wNDQwODUtNC4zODM1NjIgLjgyMDkyMi0yLjk0ODk0MSAuODIwOTIyLTEuOTkyNTI4Qy44MjA5MjItLjIwNzIyMyAxLjU3MDExMiAxLjIyNzM5NyAyLjY1NDA0NyAxLjk5MjUyOFonLz4KPHBhdGggaWQ9J2c1LTQxJyBkPSdNMi40NjI3NjUtMS45OTI1MjhDMi40NjI3NjUtMi43NDk2ODkgMi4zMzUyNDMtMy42NTgyODEgMS44NDEwOTYtNC41OTg3NTVDMS40NTA1Ni01LjMzMjAwNSAuNzI1MjgtNS45Nzc1ODQgLjU4MTgxOC01Ljk3NzU4NEMuNTAyMTE3LTUuOTc3NTg0IC40NzgyMDctNS45MjE3OTMgLjQ3ODIwNy01Ljg4MTk0M0MuNDc4MjA3LTUuODUwMDYyIC40NzgyMDctNS44MzQxMjIgLjU3Mzg0OC01LjczODQ4MUMxLjY4OTY2NC00LjY3ODQ1NiAxLjk0NDcwNy0zLjIxOTkyNSAxLjk0NDcwNy0xLjk5MjUyOEMxLjk0NDcwNyAuMjk0ODk0IC45OTYyNjQgMS4zNzg4MjkgLjU4OTc4OCAxLjc0NTQ1NUMuNDg2MTc3IDEuODQ5MDY2IC40NzgyMDcgMS44NTcwMzYgLjQ3ODIwNyAxLjg5Njg4N1MuNTAyMTE3IDEuOTkyNTI4IC41ODE4MTggMS45OTI1MjhDLjcwOTM0IDEuOTkyNTI4IDEuMTA3ODQ2IDEuNTg2MDUyIDEuMTcxNjA2IDEuNTE0MzIxQzIuMjM5NjAxIC4zOTg1MDYgMi40NjI3NjUtMS4wMzYxMTUgMi40NjI3NjUtMS45OTI1MjhaJy8+CjxwYXRoIGlkPSdnNS00OCcgZD0nTTMuODk3Mzg1LTIuNTQyNDY2QzMuODk3Mzg1LTMuMzk1MjY4IDMuODA5NzE0LTMuOTEzMzI1IDMuNTQ2Ny00LjQyMzQxMkMzLjE5NjAxNS01LjEyNDc4MiAyLjU1MDQzNi01LjMwMDEyNSAyLjExMjA4LTUuMzAwMTI1QzEuMTA3ODQ2LTUuMzAwMTI1IC43NDEyMi00LjU1MDkzNCAuNjI5NjM5LTQuMzI3NzcxQy4zNDI3MTUtMy43NDU5NTMgLjMyNjc3NS0yLjk1NjkxMiAuMzI2Nzc1LTIuNTQyNDY2Qy4zMjY3NzUtMi4wMTY0MzggLjM1MDY4NS0xLjIxMTQ1NyAuNzMzMjUtLjU3Mzg0OEMxLjA5OTg3NSAuMDE1OTQgMS42ODk2NjQgLjE2NzM3MiAyLjExMjA4IC4xNjczNzJDMi40OTQ2NDUgLjE2NzM3MiAzLjE4MDA3NSAuMDQ3ODIxIDMuNTc4NTgtLjc0MTIyQzMuODczNDc0LTEuMzE1MDY4IDMuODk3Mzg1LTIuMDI0NDA4IDMuODk3Mzg1LTIuNTQyNDY2Wk0yLjExMjA4LS4wNTU3OTFDMS44NDEwOTYtLjA1NTc5MSAxLjI5MTE1OC0uMTgzMzEzIDEuMTIzNzg2LTEuMDIwMTc0QzEuMDM2MTE1LTEuNDc0NDcxIDEuMDM2MTE1LTIuMjIzNjYxIDEuMDM2MTE1LTIuNjM4MTA3QzEuMDM2MTE1LTMuMTg4MDQ1IDEuMDM2MTE1LTMuNzQ1OTUzIDEuMTIzNzg2LTQuMTg0MzA5QzEuMjkxMTU4LTQuOTk3MjYgMS45MTI4MjctNS4wNzY5NjEgMi4xMTIwOC01LjA3Njk2MUMyLjM4MzA2NC01LjA3Njk2MSAyLjkzMzAwMS00Ljk0MTQ2OSAzLjA5MjQwMy00LjIxNjE4OUMzLjE4ODA0NS0zLjc3NzgzMyAzLjE4ODA0NS0zLjE4MDA3NSAzLjE4ODA0NS0yLjYzODEwN0MzLjE4ODA0NS0yLjE2Nzg3IDMuMTg4MDQ1LTEuNDUwNTYgMy4wOTI0MDMtMS4wMDQyMzRDMi45MjUwMzEtLjE2NzM3MiAyLjM3NTA5My0uMDU1NzkxIDIuMTEyMDgtLjA1NTc5MVonLz4KPHBhdGggaWQ9J2c1LTQ5JyBkPSdNMi41MDI2MTUtNS4wNzY5NjFDMi41MDI2MTUtNS4yOTIxNTQgMi40ODY2NzUtNS4zMDAxMjUgMi4yNzE0ODItNS4zMDAxMjVDMS45NDQ3MDctNC45ODEzMiAxLjUyMjI5MS00Ljc5MDAzNyAuNzY1MTMxLTQuNzkwMDM3Vi00LjUyNzAyNEMuOTgwMzI0LTQuNTI3MDI0IDEuNDEwNzEtNC41MjcwMjQgMS44NzI5NzYtNC43NDIyMTdWLS42NTM1NDlDMS44NzI5NzYtLjM1ODY1NSAxLjg0OTA2Ni0uMjYzMDE0IDEuMDkxOTA1LS4yNjMwMTRILjgxMjk1MVYwQzEuMTM5NzI2LS4wMjM5MSAxLjgyNTE1Ni0uMDIzOTEgMi4xODM4MTEtLjAyMzkxUzMuMjM1ODY2LS4wMjM5MSAzLjU2MjY0IDBWLS4yNjMwMTRIMy4yODM2ODZDMi41MjY1MjYtLjI2MzAxNCAyLjUwMjYxNS0uMzU4NjU1IDIuNTAyNjE1LS42NTM1NDlWLTUuMDc2OTYxWicvPgo8cGF0aCBpZD0nZzUtNTAnIGQ9J00yLjI0NzU3Mi0xLjYyNTkwM0MyLjM3NTA5My0xLjc0NTQ1NSAyLjcwOTgzOC0yLjAwODQ2OCAyLjgzNzM2LTIuMTIwMDVDMy4zMzE1MDctMi41NzQzNDYgMy44MDE3NDMtMy4wMTI3MDIgMy44MDE3NDMtMy43Mzc5ODNDMy44MDE3NDMtNC42ODY0MjYgMy4wMDQ3MzItNS4zMDAxMjUgMi4wMDg0NjgtNS4zMDAxMjVDMS4wNTIwNTUtNS4zMDAxMjUgLjQyMjQxNi00LjU3NDg0NCAuNDIyNDE2LTMuODY1NTA0Qy40MjI0MTYtMy40NzQ5NjkgLjczMzI1LTMuNDE5MTc4IC44NDQ4MzItMy40MTkxNzhDMS4wMTIyMDQtMy40MTkxNzggMS4yNTkyNzgtMy41Mzg3MyAxLjI1OTI3OC0zLjg0MTU5NEMxLjI1OTI3OC00LjI1NjA0IC44NjA3NzItNC4yNTYwNCAuNzY1MTMxLTQuMjU2MDRDLjk5NjI2NC00LjgzNzg1OCAxLjUzMDI2Mi01LjAzNzExMSAxLjkyMDc5Ny01LjAzNzExMUMyLjY2MjAxNy01LjAzNzExMSAzLjA0NDU4My00LjQwNzQ3MiAzLjA0NDU4My0zLjczNzk4M0MzLjA0NDU4My0yLjkwOTA5MSAyLjQ2Mjc2NS0yLjMwMzM2MiAxLjUyMjI5MS0xLjMzODk3OUwuNTE4MDU3LS4zMDI4NjRDLjQyMjQxNi0uMjE1MTkzIC40MjI0MTYtLjE5OTI1MyAuNDIyNDE2IDBIMy41NzA2MUwzLjgwMTc0My0xLjQyNjY1SDMuNTU0NjdDMy41MzA3Ni0xLjI2NzI0OCAzLjQ2Njk5OS0uODY4NzQyIDMuMzcxMzU3LS43MTczMUMzLjMyMzUzNy0uNjUzNTQ5IDIuNzE3ODA4LS42NTM1NDkgMi41OTAyODYtLjY1MzU0OUgxLjE3MTYwNkwyLjI0NzU3Mi0xLjYyNTkwM1onLz4KPHBhdGggaWQ9J2c1LTYxJyBkPSdNNS44MjYxNTItMi42NTQwNDdDNS45NDU3MDQtMi42NTQwNDcgNi4xMDUxMDYtMi42NTQwNDcgNi4xMDUxMDYtMi44MzczNlM1LjkxMzgyMy0zLjAyMDY3MiA1Ljc5NDI3MS0zLjAyMDY3MkguNzgxMDcxQy42NjE1MTktMy4wMjA2NzIgLjQ3MDIzNy0zLjAyMDY3MiAuNDcwMjM3LTIuODM3MzZTLjYyOTYzOS0yLjY1NDA0NyAuNzQ5MTkxLTIuNjU0MDQ3SDUuODI2MTUyWk01Ljc5NDI3MS0uOTY0Mzg0QzUuOTEzODIzLS45NjQzODQgNi4xMDUxMDYtLjk2NDM4NCA2LjEwNTEwNi0xLjE0NzY5NlM1Ljk0NTcwNC0xLjMzMTAwOSA1LjgyNjE1Mi0xLjMzMTAwOUguNzQ5MTkxQy42Mjk2MzktMS4zMzEwMDkgLjQ3MDIzNy0xLjMzMTAwOSAuNDcwMjM3LTEuMTQ3Njk2Uy42NjE1MTktLjk2NDM4NCAuNzgxMDcxLS45NjQzODRINS43OTQyNzFaJy8+CjxwYXRoIGlkPSdnMy0xMicgZD0nTTQuNzgyMDY3LTQuNTM0OTk0QzQuNzgyMDY3LTUuMjYwMjc0IDQuMTkyMjc5LTUuNjE4OTI5IDMuNTMwNzYtNS42MTg5MjlDMi41MDI2MTUtNS42MTg5MjkgMS43Mzc0ODQtNC40NTUyOTMgMS41MTQzMjEtMy41Nzg1OEwuMjU1MDQ0IDEuNDUwNTZDLjIzOTEwMyAxLjUwNjM1MSAuMzAyODY0IDEuNTQ2MjAyIC4zNTA2ODUgMS41NDYyMDJDLjQxNDQ0NiAxLjU0NjIwMiAuNDc4MjA3IDEuNTQ2MjAyIC40OTQxNDcgMS40OTA0MTFMMS4wMzYxMTUtLjY0NTU3OUMxLjIxOTQyNy0uMjE1MTkzIDEuNTk0MDIyIC4wNzE3MzEgMi4xNjc4NyAuMDcxNzMxQzMuMjY3NzQ2IC4wNzE3MzEgNC40NzEyMzMtLjcwOTM0IDQuNDcxMjMzLTEuOTc2NTg4QzQuNDcxMjMzLTIuNTAyNjE1IDQuMjcxOTgtMi44NTMzIDMuODczNDc0LTMuMTgwMDc1QzMuOTIxMjk1LTMuMTg4MDQ1IDQuMDY0NzU3LTMuMjkxNjU2IDQuMTA0NjA4LTMuMzIzNTM3QzQuNTAzMTEzLTMuNTk0NTIxIDQuNzgyMDY3LTQuMDQ4ODE3IDQuNzgyMDY3LTQuNTM0OTk0Wk0zLjIxMTk1NS0zLjE4MDA3NUMzLjA2ODQ5My0zLjE1NjE2NCAyLjkyNTAzMS0zLjE0MDIyNCAyLjc3MzU5OS0zLjE0MDIyNEMyLjY4NTkyOC0zLjE0MDIyNCAyLjU5ODI1Ny0zLjE0MDIyNCAyLjUxMDU4NS0zLjE3MjEwNUMyLjY2MjAxNy0zLjIxMTk1NSAyLjgyMTQyLTMuMjExOTU1IDIuOTcyODUyLTMuMjExOTU1QzMuMDUyNTUzLTMuMjExOTU1IDMuMTMyMjU0LTMuMjAzOTg1IDMuMjExOTU1LTMuMTgwMDc1Wk00LjI3OTk1LTQuNjg2NDI2QzQuMjc5OTUtNC4yODc5MiA0LjEwNDYwOC0zLjgxNzY4NCAzLjgyNTY1NC0zLjUzODczQzMuNzg1ODAzLTMuNDk4ODc5IDMuNjE4NDMxLTMuMzQ3NDQ3IDMuNTcwNjEtMy4zMzk0NzdDMy4zNDc0NDctMy4zNzkzMjggMy4xNzIxMDUtMy40MzUxMTggMi45NDA5NzEtMy40MzUxMThDMi43MzM3NDgtMy40MzUxMTggMi4yMzE2MzEtMy40NTEwNTkgMi4yMzE2MzEtMy4xNDAyMjRDMi4yMzE2MzEtMi45MDExMjEgMi42ODU5MjgtMi45MTcwNjEgMi44NDUzMy0yLjkxNzA2MUMzLjA5MjQwMy0yLjkxNzA2MSAzLjMyMzUzNy0yLjk0MDk3MSAzLjU1NDY3LTMuMDI4NjQzQzMuNzkzNzczLTIuODM3MzYgMy45MTMzMjUtMi41ODIzMTYgMy45MTMzMjUtMi4xODM4MTFDMy45MTMzMjUtMS43MTM1NzQgMy43NTM5MjMtMS4xODc1NDcgMy41MjI3OS0uODY4NzQyQzMuMjI3ODk1LS40NDYzMjYgMi43MzM3NDgtLjE1MTQzMiAyLjEzNTk5LS4xNTE0MzJDMS42MDk5NjMtLjE1MTQzMiAxLjE5NTUxNy0uNTU3OTA4IDEuMTk1NTE3LTEuMTE1ODE2QzEuMTk1NTE3LTEuMjE5NDI3IDEuMjAzNDg3LTEuMzIzMDM5IDEuMjI3Mzk3LTEuNDAyNzRMMS43NTM0MjUtMy41MjI3OUMxLjkyODc2Ny00LjIyNDE1OSAyLjYwNjIyNy01LjM5NTc2NiAzLjQ5ODg3OS01LjM5NTc2NkMzLjkwNTM1NS01LjM5NTc2NiA0LjI3OTk1LTUuMTk2NTEzIDQuMjc5OTUtNC42ODY0MjZaJy8+CjxwYXRoIGlkPSdnMy0yMScgZD0nTTIuOTk2NzYyLTIuMjg3NDIyQzMuMjkxNjU2LTEuNTYyMTQyIDMuNzc3ODMzLS4yNjMwMTQgMy44NjU1MDQtLjExOTU1MkM0LjAwMDk5NiAuMDc5NzAxIDQuMTYwMzk5IC4wNzk3MDEgNC4zNTE2ODEgLjA3OTcwMUM0LjU4MjgxNCAuMDc5NzAxIDQuNjQ2NTc1IC4wNzk3MDEgNC42NDY1NzUtLjAxNTk0QzQuNjQ2NTc1LS4wNTU3OTEgNC42MzA2MzUtLjA3OTcwMSA0LjU5ODc1NS0uMTAzNjExQzQuNTAzMTEzLS4yMTUxOTMgNC40NjMyNjMtLjI5NDg5NCA0LjQwNzQ3Mi0uNDQ2MzI2TDIuNjE0MTk3LTQuOTk3MjZDMi41NTg0MDYtNS4xNDg2OTIgMi40MDY5NzQtNS41MzEyNTggMS41ODYwNTItNS41MzEyNThDMS41MDYzNTEtNS41MzEyNTggMS4zODY4LTUuNTMxMjU4IDEuMzg2OC01LjQxOTY3NkMxLjM4NjgtNS4zMjQwMzUgMS40NjY1MDEtNS4zMTYwNjUgMS41MDYzNTEtNS4zMDgwOTVDMS42NjU3NTMtNS4yODQxODQgMS44MTcxODYtNS4yNjgyNDQgMi4wMDA0OTgtNC44MDU5NzhMMi41NzQzNDYtMy4zNzEzNTdMMi44ODUxODEtMi41NjYzNzZMLjYwNTcyOS0uNDU0Mjk2Qy41MTgwNTctLjM3NDU5NSAuNDM4MzU2LS4yNzg5NTQgLjQzODM1Ni0uMTY3MzcyQy40MzgzNTYtLjAwNzk3IC41NzM4NDggLjA5NTY0MSAuNzA5MzQgLjA5NTY0MUMuODIwOTIyIC4wOTU2NDEgLjkzMjUwMyAuMDA3OTcgMS4wMDQyMzQtLjA3MTczMUwyLjk5Njc2Mi0yLjI4NzQyMlonLz4KPHBhdGggaWQ9J2czLTI3JyBkPSdNNC4zNzU1OTItMi45MDkwOTFDNC41MTkwNTQtMi45MDkwOTEgNC41NzQ4NDQtMi45MDkwOTEgNC42NzA0ODYtMi45NzI4NTJDNC43NTgxNTctMy4wNDQ1ODMgNC43OTAwMzctMy4xNTYxNjQgNC43OTAwMzctMy4yMTE5NTVDNC43OTAwMzctMy40MzUxMTggNC41OTA3ODUtMy40MzUxMTggNC40NTUyOTMtMy40MzUxMThIMi40OTQ2NDVDMS4yNjcyNDgtMy40MzUxMTggLjMyNjc3NS0yLjE3NTg0MSAuMzI2Nzc1LTEuMjExNDU3Qy4zMjY3NzUtLjQzMDM4NiAuODg0NjgyIC4wNzk3MDEgMS42MjU5MDMgLjA3OTcwMUMyLjYzMDEzNyAuMDc5NzAxIDMuNzIyMDQyLS44ODQ2ODIgMy43MjIwNDItMi4wNzIyMjlDMy43MjIwNDItMi41MDI2MTUgMy41NzA2MS0yLjc1NzY1OSAzLjQ4MjkzOS0yLjkwOTA5MUg0LjM3NTU5MlpNMS42MzM4NzMtLjE0MzQ2MkMxLjIzNTM2Ny0uMTQzNDYyIC44ODQ2ODItLjQwNjQ3NiAuODg0NjgyLS45ODgyOTRDLjg4NDY4Mi0xLjMyMzAzOSAxLjA4MzkzNS0yLjkwOTA5MSAyLjM2NzEyMy0yLjkwOTA5MUMzLjE0MDIyNC0yLjkwOTA5MSAzLjE0MDIyNC0yLjMxOTMwMyAzLjE0MDIyNC0yLjE1MTkzQzMuMTQwMjI0LTEuMzMxMDA5IDIuNTc0MzQ2LS4xNDM0NjIgMS42MzM4NzMtLjE0MzQ2MlonLz4KPHBhdGggaWQ9J2czLTU5JyBkPSdNMS40OTA0MTEtLjExOTU1MkMxLjQ5MDQxMSAuMzk4NTA2IDEuMzc4ODI5IC44NTI4MDIgLjg4NDY4MiAxLjM0Njk0OUMuODUyODAyIDEuMzcwODU5IC44MzY4NjIgMS4zODY4IC44MzY4NjIgMS40MjY2NUMuODM2ODYyIDEuNDkwNDExIC45MDA2MjMgMS41MzgyMzIgLjk1NjQxMyAxLjUzODIzMkMxLjA1MjA1NSAxLjUzODIzMiAxLjcxMzU3NCAuOTA4NTkzIDEuNzEzNTc0LS4wMjM5MUMxLjcxMzU3NC0uNTMzOTk4IDEuNTIyMjkxLS44ODQ2ODIgMS4xNzE2MDYtLjg4NDY4MkMuODkyNjUzLS44ODQ2ODIgLjczMzI1LS42NjE1MTkgLjczMzI1LS40NDYzMjZDLjczMzI1LS4yMjMxNjMgLjg4NDY4MiAwIDEuMTc5NTc3IDBDMS4zNzA4NTkgMCAxLjQ5MDQxMS0uMTExNTgyIDEuNDkwNDExLS4xMTk1NTJaJy8+CjxwYXRoIGlkPSdnMy02MScgZD0nTTMuNzA2MTAyLTUuNjQyODM5QzMuNzUzOTIzLTUuNzU0NDIxIDMuNzUzOTIzLTUuNzcwMzYxIDMuNzUzOTIzLTUuNzk0MjcxQzMuNzUzOTIzLTUuODk3ODgzIDMuNjc0MjIyLTUuOTc3NTg0IDMuNTcwNjEtNS45Nzc1ODRDMy40NDMwODgtNS45Nzc1ODQgMy40MTEyMDgtNS44ODE5NDMgMy4zNzkzMjgtNS44MDIyNDJMLjUxODA1NyAxLjY1Nzc4M0MuNDcwMjM3IDEuNzY5MzY1IC40NzAyMzcgMS43ODUzMDUgLjQ3MDIzNyAxLjgwOTIxNUMuNDcwMjM3IDEuOTEyODI3IC41NDk5MzggMS45OTI1MjggLjY1MzU0OSAxLjk5MjUyOEMuNzgxMDcxIDEuOTkyNTI4IC44MTI5NTEgMS44OTY4ODcgLjg0NDgzMiAxLjgxNzE4NkwzLjcwNjEwMi01LjY0MjgzOVonLz4KPHBhdGggaWQ9J2czLTc4JyBkPSdNNi4zMTIzMjktNC41NzQ4NDRDNi40MDc5Ny00Ljk2NTM4IDYuNTgzMzEzLTUuMTU2NjYzIDcuMTU3MTYxLTUuMTgwNTczQzcuMjM2ODYyLTUuMTgwNTczIDcuMzAwNjIzLTUuMjI4Mzk0IDcuMzAwNjIzLTUuMzMyMDA1QzcuMzAwNjIzLTUuMzc5ODI2IDcuMjYwNzcyLTUuNDQzNTg3IDcuMTgxMDcxLTUuNDQzNTg3QzcuMTI1MjgtNS40NDM1ODcgNi45NzM4NDgtNS40MTk2NzYgNi4zODQwNi01LjQxOTY3NkM1Ljc0NjQ1MS01LjQxOTY3NiA1LjY0MjgzOS01LjQ0MzU4NyA1LjU3MTEwOC01LjQ0MzU4N0M1LjQ0MzU4Ny01LjQ0MzU4NyA1LjQxOTY3Ni01LjM1NTkxNSA1LjQxOTY3Ni01LjI5MjE1NEM1LjQxOTY3Ni01LjE4ODU0MyA1LjUyMzI4OC01LjE4MDU3MyA1LjU5NTAxOS01LjE4MDU3M0M2LjA4MTE5Ni01LjE2NDYzMyA2LjA4MTE5Ni00Ljk0OTQ0IDYuMDgxMTk2LTQuODM3ODU4QzYuMDgxMTk2LTQuNzk4MDA3IDYuMDgxMTk2LTQuNzU4MTU3IDYuMDQ5MzE1LTQuNjMwNjM1TDUuMTcyNjAzLTEuMTM5NzI2TDMuMjUxODA2LTUuMzAwMTI1QzMuMTg4MDQ1LTUuNDQzNTg3IDMuMTcyMTA1LTUuNDQzNTg3IDIuOTgwODIyLTUuNDQzNTg3SDEuOTQ0NzA3QzEuODAxMjQ1LTUuNDQzNTg3IDEuNjk3NjM0LTUuNDQzNTg3IDEuNjk3NjM0LTUuMjkyMTU0QzEuNjk3NjM0LTUuMTgwNTczIDEuNzkzMjc1LTUuMTgwNTczIDEuOTYwNjQ4LTUuMTgwNTczQzIuMDI0NDA4LTUuMTgwNTczIDIuMjYzNTEyLTUuMTgwNTczIDIuNDQ2ODI0LTUuMTMyNzUyTDEuMzc4ODI5LS44NTI4MDJDMS4yODMxODgtLjQ1NDI5NiAxLjA3NTk2NS0uMjc4OTU0IC41NDE5NjgtLjI2MzAxNEMuNDk0MTQ3LS4yNjMwMTQgLjM5ODUwNi0uMjU1MDQ0IC4zOTg1MDYtLjExMTU4MkMuMzk4NTA2LS4wNjM3NjEgLjQzODM1NiAwIC41MTgwNTcgMEMuNTQ5OTM4IDAgLjczMzI1LS4wMjM5MSAxLjMwNzA5OC0uMDIzOTFDMS45MzY3MzctLjAyMzkxIDIuMDU2Mjg5IDAgMi4xMjgwMiAwQzIuMTU5OSAwIDIuMjc5NDUyIDAgMi4yNzk0NTItLjE1MTQzMkMyLjI3OTQ1Mi0uMjQ3MDczIDIuMTkxNzgxLS4yNjMwMTQgMi4xMzU5OS0uMjYzMDE0QzEuODQ5MDY2LS4yNzA5ODQgMS42MDk5NjMtLjMxODgwNCAxLjYwOTk2My0uNTk3NzU4QzEuNjA5OTYzLS42Mzc2MDkgMS42MzM4NzMtLjc0OTE5MSAxLjYzMzg3My0uNzU3MTYxTDIuNjc3OTU4LTQuOTE3NTU5SDIuNjg1OTI4TDQuOTAxNjE5LS4xNDM0NjJDNC45NTc0MS0uMDE1OTQgNC45NjUzOCAwIDUuMDUzMDUxIDBDNS4xNjQ2MzMgMCA1LjE3MjYwMy0uMDMxODggNS4yMDQ0ODMtLjE2NzM3Mkw2LjMxMjMyOS00LjU3NDg0NFonLz4KPHBhdGggaWQ9J2czLTEwNycgZD0nTTIuMzI3MjczLTUuMjkyMTU0QzIuMzM1MjQzLTUuMzA4MDk1IDIuMzU5MTUzLTUuNDExNzA2IDIuMzU5MTUzLTUuNDE5Njc2QzIuMzU5MTUzLTUuNDU5NTI3IDIuMzI3MjczLTUuNTMxMjU4IDIuMjMxNjMxLTUuNTMxMjU4QzIuMTk5NzUxLTUuNTMxMjU4IDEuOTUyNjc3LTUuNTA3MzQ3IDEuNzY5MzY1LTUuNDkxNDA3TDEuMzIzMDM5LTUuNDU5NTI3QzEuMTQ3Njk2LTUuNDQzNTg3IDEuMDY3OTk1LTUuNDM1NjE2IDEuMDY3OTk1LTUuMjkyMTU0QzEuMDY3OTk1LTUuMTgwNTczIDEuMTc5NTc3LTUuMTgwNTczIDEuMjc1MjE4LTUuMTgwNTczQzEuNjU3NzgzLTUuMTgwNTczIDEuNjU3NzgzLTUuMTMyNzUyIDEuNjU3NzgzLTUuMDYxMDIxQzEuNjU3NzgzLTUuMDM3MTExIDEuNjU3NzgzLTUuMDIxMTcxIDEuNjE3OTMzLTQuODc3NzA5TC40ODYxNzctLjM0MjcxNUMuNDU0Mjk2LS4yMjMxNjMgLjQ1NDI5Ni0uMTc1MzQyIC40NTQyOTYtLjE2NzM3MkMuNDU0Mjk2LS4wMzE4OCAuNTY1ODc4IC4wNzk3MDEgLjcxNzMxIC4wNzk3MDFDLjk4ODI5NCAuMDc5NzAxIDEuMDUyMDU1LS4xNzUzNDIgMS4wODM5MzUtLjI4NjkyNEMxLjE2MzYzNi0uNjIxNjY5IDEuMzcwODU5LTEuNDY2NTAxIDEuNDU4NTMxLTEuODAxMjQ1QzEuODk2ODg3LTEuNzUzNDI1IDIuNDMwODg0LTEuNjAxOTkzIDIuNDMwODg0LTEuMTQ3Njk2QzIuNDMwODg0LTEuMTA3ODQ2IDIuNDMwODg0LTEuMDY3OTk1IDIuNDE0OTQ0LS45ODgyOTRDMi4zOTEwMzQtLjg4NDY4MiAyLjM3NTA5My0uNzczMTAxIDIuMzc1MDkzLS43MzMyNUMyLjM3NTA5My0uMjYzMDE0IDIuNzI1Nzc4IC4wNzk3MDEgMy4xODgwNDUgLjA3OTcwMUMzLjUyMjc5IC4wNzk3MDEgMy43MzAwMTItLjE2NzM3MiAzLjgzMzYyNC0uMzE4ODA0QzQuMDI0OTA3LS42MTM2OTkgNC4xNTI0MjgtMS4wOTE5MDUgNC4xNTI0MjgtMS4xMzk3MjZDNC4xNTI0MjgtMS4yMTk0MjcgNC4wODg2NjctMS4yNDMzMzcgNC4wMzI4NzctMS4yNDMzMzdDMy45MzcyMzUtMS4yNDMzMzcgMy45MjEyOTUtMS4xOTU1MTcgMy44ODk0MTUtMS4wNTIwNTVDMy43ODU4MDMtLjY3NzQ2IDMuNTc4NTgtLjE0MzQ2MiAzLjIwMzk4NS0uMTQzNDYyQzIuOTk2NzYyLS4xNDM0NjIgMi45NDg5NDEtLjMxODgwNCAyLjk0ODk0MS0uNTMzOTk4QzIuOTQ4OTQxLS42Mzc2MDkgMi45NTY5MTItLjczMzI1IDIuOTk2NzYyLS45MTY1NjNDMy4wMDQ3MzItLjk0ODQ0MyAzLjAzNjYxMy0xLjA3NTk2NSAzLjAzNjYxMy0xLjE2MzYzNkMzLjAzNjYxMy0xLjgxNzE4NiAyLjIxNTY5MS0xLjk2MDY0OCAxLjgwOTIxNS0yLjAxNjQzOEMyLjEwNDExLTIuMTkxNzgxIDIuMzc1MDkzLTIuNDYyNzY1IDIuNDcwNzM1LTIuNTY2Mzc2QzIuOTA5MDkxLTIuOTk2NzYyIDMuMjY3NzQ2LTMuMjkxNjU2IDMuNjUwMzExLTMuMjkxNjU2QzMuNzUzOTIzLTMuMjkxNjU2IDMuODQ5NTY0LTMuMjY3NzQ2IDMuOTEzMzI1LTMuMTg4MDQ1QzMuNDgyOTM5LTMuMTMyMjU0IDMuNDgyOTM5LTIuNzU3NjU5IDMuNDgyOTM5LTIuNzQ5Njg5QzMuNDgyOTM5LTIuNTc0MzQ2IDMuNjE4NDMxLTIuNDU0Nzk1IDMuNzkzNzczLTIuNDU0Nzk1QzQuMDA4OTY2LTIuNDU0Nzk1IDQuMjQ4MDctMi42MzAxMzcgNC4yNDgwNy0yLjk1NjkxMkM0LjI0ODA3LTMuMjI3ODk1IDQuMDU2Nzg3LTMuNTE0ODE5IDMuNjU4MjgxLTMuNTE0ODE5QzMuMTk2MDE1LTMuNTE0ODE5IDIuNzgxNTY5LTMuMTY0MTM0IDIuMzI3MjczLTIuNzA5ODM4QzEuODY1MDA2LTIuMjU1NTQyIDEuNjY1NzUzLTIuMTY3ODcgMS41MzgyMzItMi4xMTIwOEwyLjMyNzI3My01LjI5MjE1NFonLz4KPHBhdGggaWQ9J2c2LTQwJyBkPSdNMy44ODU0MyAyLjkwNTEwNkMzLjg4NTQzIDIuODY5MjQgMy44ODU0MyAyLjg0NTMzIDMuNjgyMTkyIDIuNjQyMDkyQzIuNDg2Njc1IDEuNDM0NjIgMS44MTcxODYtLjUzNzk4MyAxLjgxNzE4Ni0yLjk3NjgzN0MxLjgxNzE4Ni01LjI5NjEzOSAyLjM3OTA3OC03LjI5MjY1MyAzLjc2NTg3OC04LjcwMzM2MkMzLjg4NTQzLTguODEwOTU5IDMuODg1NDMtOC44MzQ4NjkgMy44ODU0My04Ljg3MDczNUMzLjg4NTQzLTguOTQyNDY2IDMuODI1NjU0LTguOTY2Mzc2IDMuNzc3ODMzLTguOTY2Mzc2QzMuNjIyNDE2LTguOTY2Mzc2IDIuNjQyMDkyLTguMTA1NjA0IDIuMDU2Mjg5LTYuOTMzOTk4QzEuNDQ2NTc1LTUuNzI2NTI2IDEuMTcxNjA2LTQuNDQ3MzIzIDEuMTcxNjA2LTIuOTc2ODM3QzEuMTcxNjA2LTEuOTEyODI3IDEuMzM4OTc5LS40OTAxNjIgMS45NjA2NDggLjc4OTA0MUMyLjY2NjAwMiAyLjIyMzY2MSAzLjY0NjMyNiAzLjAwMDc0NyAzLjc3NzgzMyAzLjAwMDc0N0MzLjgyNTY1NCAzLjAwMDc0NyAzLjg4NTQzIDIuOTc2ODM3IDMuODg1NDMgMi45MDUxMDZaJy8+CjxwYXRoIGlkPSdnNi00MScgZD0nTTMuMzcxMzU3LTIuOTc2ODM3QzMuMzcxMzU3LTMuODg1NDMgMy4yNTE4MDYtNS4zNjc4NyAyLjU4MjMxNi02Ljc1NDY3QzEuODc2OTYxLTguMTg5MjkgLjg5NjYzOC04Ljk2NjM3NiAuNzY1MTMxLTguOTY2Mzc2Qy43MTczMS04Ljk2NjM3NiAuNjU3NTM0LTguOTQyNDY2IC42NTc1MzQtOC44NzA3MzVDLjY1NzUzNC04LjgzNDg2OSAuNjU3NTM0LTguODEwOTU5IC44NjA3NzItOC42MDc3MjFDMi4wNTYyODktNy40MDAyNDkgMi43MjU3NzgtNS40Mjc2NDYgMi43MjU3NzgtMi45ODg3OTJDMi43MjU3NzgtLjY2OTQ4OSAyLjE2Mzg4NSAxLjMyNzAyNCAuNzc3MDg2IDIuNzM3NzMzQy42NTc1MzQgMi44NDUzMyAuNjU3NTM0IDIuODY5MjQgLjY1NzUzNCAyLjkwNTEwNkMuNjU3NTM0IDIuOTc2ODM3IC43MTczMSAzLjAwMDc0NyAuNzY1MTMxIDMuMDAwNzQ3Qy45MjA1NDggMy4wMDA3NDcgMS45MDA4NzIgMi4xMzk5NzUgMi40ODY2NzUgLjk2ODM2OUMzLjA5NjM4OS0uMjUxMDU5IDMuMzcxMzU3LTEuNTQyMjE3IDMuMzcxMzU3LTIuOTc2ODM3WicvPgo8cGF0aCBpZD0nZzYtNDknIGQ9J00zLjQ0MzA4OC03LjY2MzI2M0MzLjQ0MzA4OC03LjkzODIzMiAzLjQ0MzA4OC03Ljk1MDE4NyAzLjIwMzk4NS03Ljk1MDE4N0MyLjkxNzA2MS03LjYyNzM5NyAyLjMxOTMwMy03LjE4NTA1NiAxLjA4NzkyLTcuMTg1MDU2Vi02LjgzODM1NkMxLjM2Mjg4OS02LjgzODM1NiAxLjk2MDY0OC02LjgzODM1NiAyLjYxODE4Mi03LjE0OTE5MVYtLjkyMDU0OEMyLjYxODE4Mi0uNDkwMTYyIDIuNTgyMzE2LS4zNDY3IDEuNTMwMjYyLS4zNDY3SDEuMTU5NjUxVjBDMS40ODI0NDEtLjAyMzkxIDIuNjQyMDkyLS4wMjM5MSAzLjAzNjYxMy0uMDIzOTFTNC41Nzg4MjktLjAyMzkxIDQuOTAxNjE5IDBWLS4zNDY3SDQuNTMxMDA5QzMuNDc4OTU0LS4zNDY3IDMuNDQzMDg4LS40OTAxNjIgMy40NDMwODgtLjkyMDU0OFYtNy42NjMyNjNaJy8+CjxwYXRoIGlkPSdnNi01MCcgZD0nTTUuMjYwMjc0LTIuMDA4NDY4SDQuOTk3MjZDNC45NjEzOTUtMS44MDUyMyA0Ljg2NTc1My0xLjE0NzY5NiA0Ljc0NjIwMi0uOTU2NDEzQzQuNjYyNTE2LS44NDg4MTcgMy45ODEwNzEtLjg0ODgxNyAzLjYyMjQxNi0uODQ4ODE3SDEuNDEwNzFDMS43MzM0OTktMS4xMjM3ODYgMi40NjI3NjUtMS44ODg5MTcgMi43NzM1OTktMi4xNzU4NDFDNC41OTA3ODUtMy44NDk1NjQgNS4yNjAyNzQtNC40NzEyMzMgNS4yNjAyNzQtNS42NTQ3OTVDNS4yNjAyNzQtNy4wMjk2MzkgNC4xNzIzNTQtNy45NTAxODcgMi43ODU1NTQtNy45NTAxODdTLjU4NTgwMy02Ljc2NjYyNSAuNTg1ODAzLTUuNzM4NDgxQy41ODU4MDMtNS4xMjg3NjcgMS4xMTE4MzEtNS4xMjg3NjcgMS4xNDc2OTYtNS4xMjg3NjdDMS4zOTg3NTUtNS4xMjg3NjcgMS43MDk1ODktNS4zMDgwOTUgMS43MDk1ODktNS42OTA2NkMxLjcwOTU4OS02LjAyNTQwNSAxLjQ4MjQ0MS02LjI1MjU1MyAxLjE0NzY5Ni02LjI1MjU1M0MxLjA0MDEtNi4yNTI1NTMgMS4wMTYxODktNi4yNTI1NTMgLjk4MDMyNC02LjI0MDU5OEMxLjIwNzQ3Mi03LjA1MzU0OSAxLjg1MzA1MS03LjYwMzQ4NyAyLjYzMDEzNy03LjYwMzQ4N0MzLjY0NjMyNi03LjYwMzQ4NyA0LjI2Nzk5NS02Ljc1NDY3IDQuMjY3OTk1LTUuNjU0Nzk1QzQuMjY3OTk1LTQuNjM4NjA1IDMuNjgyMTkyLTMuNzUzOTIzIDMuMDAwNzQ3LTIuOTg4NzkyTC41ODU4MDMtLjI4NjkyNFYwSDQuOTQ5NDRMNS4yNjAyNzQtMi4wMDg0NjhaJy8+CjxwYXRoIGlkPSdnNi02MScgZD0nTTguMDY5NzM4LTMuODczNDc0QzguMjM3MTExLTMuODczNDc0IDguNDUyMzA0LTMuODczNDc0IDguNDUyMzA0LTQuMDg4NjY3QzguNDUyMzA0LTQuMzE1ODE2IDguMjQ5MDY2LTQuMzE1ODE2IDguMDY5NzM4LTQuMzE1ODE2SDEuMDI4MTQ0Qy44NjA3NzItNC4zMTU4MTYgLjY0NTU3OS00LjMxNTgxNiAuNjQ1NTc5LTQuMTAwNjIzQy42NDU1NzktMy44NzM0NzQgLjg0ODgxNy0zLjg3MzQ3NCAxLjAyODE0NC0zLjg3MzQ3NEg4LjA2OTczOFpNOC4wNjk3MzgtMS42NDk4MTNDOC4yMzcxMTEtMS42NDk4MTMgOC40NTIzMDQtMS42NDk4MTMgOC40NTIzMDQtMS44NjUwMDZDOC40NTIzMDQtMi4wOTIxNTQgOC4yNDkwNjYtMi4wOTIxNTQgOC4wNjk3MzgtMi4wOTIxNTRIMS4wMjgxNDRDLjg2MDc3Mi0yLjA5MjE1NCAuNjQ1NTc5LTIuMDkyMTU0IC42NDU1NzktMS44NzY5NjFDLjY0NTU3OS0xLjY0OTgxMyAuODQ4ODE3LTEuNjQ5ODEzIDEuMDI4MTQ0LTEuNjQ5ODEzSDguMDY5NzM4WicvPgo8cGF0aCBpZD0nZzYtMTAxJyBkPSdNNC41Nzg4MjktMi43NzM1OTlDNC44NDE4NDMtMi43NzM1OTkgNC44NjU3NTMtMi43NzM1OTkgNC44NjU3NTMtMy4wMDA3NDdDNC44NjU3NTMtNC4yMDgyMTkgNC4yMjAxNzQtNS4zMzIwMDUgMi43NzM1OTktNS4zMzIwMDVDMS40MTA3MS01LjMzMjAwNSAuMzU4NjU1LTQuMTAwNjIzIC4zNTg2NTUtMi42MTgxODJDLjM1ODY1NS0xLjA0MDEgMS41NzgwODIgLjExOTU1MiAyLjkwNTEwNiAuMTE5NTUyQzQuMzI3NzcxIC4xMTk1NTIgNC44NjU3NTMtMS4xNzE2MDYgNC44NjU3NTMtMS40MjI2NjVDNC44NjU3NTMtMS40OTQzOTYgNC44MDU5NzgtMS41NDIyMTcgNC43MzQyNDctMS41NDIyMTdDNC42Mzg2MDUtMS41NDIyMTcgNC42MTQ2OTUtMS40ODI0NDEgNC41OTA3ODUtMS40MjI2NjVDNC4yNzk5NS0uNDE4NDMxIDMuNDc4OTU0LS4xNDM0NjIgMi45NzY4MzctLjE0MzQ2MlMxLjI2NzI0OC0uNDc4MjA3IDEuMjY3MjQ4LTIuNTQ2NDUxVi0yLjc3MzU5OUg0LjU3ODgyOVpNMS4yNzkyMDMtMy4wMDA3NDdDMS4zNzQ4NDQtNC44Nzc3MDkgMi40MjY4OTktNS4wOTI5MDIgMi43NjE2NDQtNS4wOTI5MDJDNC4wNDA4NDctNS4wOTI5MDIgNC4xMTI1NzgtMy40MDcyMjMgNC4xMjQ1MzMtMy4wMDA3NDdIMS4yNzkyMDNaJy8+CjxwYXRoIGlkPSdnNi0xMTInIGQ9J00yLjkyOTAxNiAxLjk3MjYwM0MyLjE2Mzg4NSAxLjk3MjYwMyAyLjAyMDQyMyAxLjk3MjYwMyAyLjAyMDQyMyAxLjQzNDYyVi0uNjQ1NTc5QzIuMjM1NjE2LS4zNDY3IDIuNzI1Nzc4IC4xMTk1NTIgMy40OTA5MDkgLjExOTU1MkM0Ljg2NTc1MyAuMTE5NTUyIDYuMDczMjI1LTEuMDQwMSA2LjA3MzIyNS0yLjU4MjMxNkM2LjA3MzIyNS00LjEwMDYyMyA0Ljk0OTQ0LTUuMjcyMjI5IDMuNjQ2MzI2LTUuMjcyMjI5QzIuNTk0MjcxLTUuMjcyMjI5IDIuMDMyMzc5LTQuNTE5MDU0IDEuOTk2NTEzLTQuNDcxMjMzVi01LjI3MjIyOUwuMzM0NzQ1LTUuMTQwNzIyVi00Ljc5NDAyMkMxLjE3MTYwNi00Ljc5NDAyMiAxLjI0MzMzNy00LjcxMDMzNiAxLjI0MzMzNy00LjE4NDMwOVYxLjQzNDYyQzEuMjQzMzM3IDEuOTcyNjAzIDEuMTExODMxIDEuOTcyNjAzIC4zMzQ3NDUgMS45NzI2MDNWMi4zMTkzMDNDLjY0NTU3OSAyLjI5NTM5MiAxLjI5MTE1OCAyLjI5NTM5MiAxLjYyNTkwMyAyLjI5NTM5MkMxLjk3MjYwMyAyLjI5NTM5MiAyLjYxODE4MiAyLjI5NTM5MiAyLjkyOTAxNiAyLjMxOTMwM1YxLjk3MjYwM1pNMi4wMjA0MjMtMy44MTM2OTlDMi4wMjA0MjMtNC4wNDA4NDcgMi4wMjA0MjMtNC4wNTI4MDIgMi4xNTE5My00LjI0NDA4NUMyLjUxMDU4NS00Ljc4MjA2NyAzLjA5NjM4OS01LjAwOTIxNSAzLjU1MDY4NS01LjAwOTIxNUM0LjQ0NzMyMy01LjAwOTIxNSA1LjE2NDYzMy0zLjkyMTI5NSA1LjE2NDYzMy0yLjU4MjMxNkM1LjE2NDYzMy0xLjE1OTY1MSA0LjM1MTY4MS0uMTE5NTUyIDMuNDMxMTMzLS4xMTk1NTJDMy4wNjA1MjMtLjExOTU1MiAyLjcxMzgyMy0uMjc0OTY5IDIuNDc0NzItLjUwMjExN0MyLjE5OTc1MS0uNzc3MDg2IDIuMDIwNDIzLTEuMDE2MTg5IDIuMDIwNDIzLTEuMzUwOTM0Vi0zLjgxMzY5OVonLz4KPHBhdGggaWQ9J2c2LTEyMCcgZD0nTTMuMzQ3NDQ3LTIuODIxNDJDMy42OTQxNDctMy4yNzU3MTYgNC4xOTYyNjQtMy45MjEyOTUgNC40MjM0MTItNC4xNzIzNTRDNC45MTM1NzQtNC43MjIyOTEgNS40NzU0NjctNC44MDU5NzggNS44NTgwMzItNC44MDU5NzhWLTUuMTUyNjc3QzUuMzQzOTYtNS4xMjg3NjcgNS4zMjAwNS01LjEyODc2NyA0Ljg1Mzc5OC01LjEyODc2N0M0LjM5OTUwMi01LjEyODc2NyA0LjM3NTU5Mi01LjEyODc2NyAzLjc3NzgzMy01LjE1MjY3N1YtNC44MDU5NzhDMy45MzMyNS00Ljc4MjA2NyA0LjEyNDUzMy00LjcxMDMzNiA0LjEyNDUzMy00LjQzNTM2N0M0LjEyNDUzMy00LjIzMjEzIDQuMDE2OTM2LTQuMTAwNjIzIDMuOTQ1MjA1LTQuMDA0OTgxTDMuMTgwMDc1LTMuMDM2NjEzTDIuMjQ3NTcyLTQuMjY3OTk1QzIuMjExNzA2LTQuMzE1ODE2IDIuMTM5OTc1LTQuNDIzNDEyIDIuMTM5OTc1LTQuNTA3MDk4QzIuMTM5OTc1LTQuNTc4ODI5IDIuMTk5NzUxLTQuNzk0MDIyIDIuNTU4NDA2LTQuODA1OTc4Vi01LjE1MjY3N0MyLjI1OTUyNy01LjEyODc2NyAxLjY0OTgxMy01LjEyODc2NyAxLjMyNzAyNC01LjEyODc2N0MuOTMyNTAzLTUuMTI4NzY3IC45MDg1OTMtNS4xMjg3NjcgLjE3OTMyOC01LjE1MjY3N1YtNC44MDU5NzhDLjc4OTA0MS00LjgwNTk3OCAxLjAxNjE4OS00Ljc4MjA2NyAxLjI2NzI0OC00LjQ1OTI3OEwyLjY2NjAwMi0yLjYzMDEzN0MyLjY4OTkxMy0yLjYwNjIyNyAyLjczNzczMy0yLjUzNDQ5NiAyLjczNzczMy0yLjQ5ODYzUzEuODA1MjMtMS4yOTExNTggMS42ODU2NzktMS4xMzU3NDFDMS4xNTk2NTEtLjQ5MDE2MiAuNjMzNjI0LS4zNTg2NTUgLjExOTU1Mi0uMzQ2N1YwQy41NzM4NDgtLjAyMzkxIC41OTc3NTgtLjAyMzkxIDEuMTExODMxLS4wMjM5MUMxLjU2NjEyNy0uMDIzOTEgMS41OTAwMzctLjAyMzkxIDIuMTg3Nzk2IDBWLS4zNDY3QzEuOTAwODcyLS4zODI1NjUgMS44NTMwNTEtLjU2MTg5MyAxLjg1MzA1MS0uNzI5MjY1QzEuODUzMDUxLS45MjA1NDggMS45MzY3MzctMS4wMTYxODkgMi4wNTYyODktMS4xNzE2MDZDMi4yMzU2MTYtMS40MjI2NjUgMi42MzAxMzctMS45MTI4MjcgMi45MTcwNjEtMi4yODM0MzdMMy44OTczODUtMS4wMDQyMzRDNC4xMDA2MjMtLjc0MTIyIDQuMTAwNjIzLS43MTczMSA0LjEwMDYyMy0uNjQ1NTc5QzQuMTAwNjIzLS41NDk5MzggNC4wMDQ5ODEtLjM1ODY1NSAzLjY4MjE5Mi0uMzQ2N1YwQzMuOTkzMDI2LS4wMjM5MSA0LjU3ODgyOS0uMDIzOTEgNC45MTM1NzQtLjAyMzkxQzUuMzA4MDk1LS4wMjM5MSA1LjMzMjAwNS0uMDIzOTEgNi4wNDkzMTUgMFYtLjM0NjdDNS40MTU2OTEtLjM0NjcgNS4yMDA0OTgtLjM3MDYxIDQuOTEzNTc0LS43NTMxNzZMMy4zNDc0NDctMi44MjE0MlonLz4KPHBhdGggaWQ9J2cxLTAnIGQ9J001LjU3MTEwOC0xLjgwOTIxNUM1LjY5ODYzLTEuODA5MjE1IDUuODczOTczLTEuODA5MjE1IDUuODczOTczLTEuOTkyNTI4UzUuNjk4NjMtMi4xNzU4NDEgNS41NzExMDgtMi4xNzU4NDFIMS4wMDQyMzRDLjg3NjcxMi0yLjE3NTg0MSAuNzAxMzctMi4xNzU4NDEgLjcwMTM3LTEuOTkyNTI4Uy44NzY3MTItMS44MDkyMTUgMS4wMDQyMzQtMS44MDkyMTVINS41NzExMDhaJy8+CjxwYXRoIGlkPSdnNC0xMicgZD0nTTYuNzY2NjI1LTYuOTU3OTA4QzYuNzY2NjI1LTcuNjc1MjE4IDYuMTU2OTEyLTguNDI4Mzk0IDUuMDY4OTkxLTguNDI4Mzk0QzMuNTI2Nzc1LTguNDI4Mzk0IDIuNTQ2NDUxLTYuNTM5NDc3IDIuMjM1NjE2LTUuMjk2MTM5TC4zNDY3IDIuMTk5NzUxQy4zMjI3OSAyLjI5NTM5MiAuMzk0NTIxIDIuMzE5MzAzIC40NTQyOTYgMi4zMTkzMDNDLjUzNzk4MyAyLjMxOTMwMyAuNTk3NzU4IDIuMzA3MzQ3IC42MDk3MTQgMi4yNDc1NzJMMS40NDY1NzUtMS4wOTk4NzVDMS41NjYxMjctLjQzMDM4NiAyLjIyMzY2MSAuMTE5NTUyIDIuOTI5MDE2IC4xMTk1NTJDNC42Mzg2MDUgLjExOTU1MiA2LjI1MjU1My0xLjIxOTQyNyA2LjI1MjU1My0zLjAwMDc0N0M2LjI1MjU1My0zLjQ1NTA0NCA2LjE0NDk1Ni0zLjkwOTM0IDUuODkzODk4LTQuMjkxOTA1QzUuNzUwNDM2LTQuNTE5MDU0IDUuNTcxMTA4LTQuNjg2NDI2IDUuMzc5ODI2LTQuODI5ODg4QzYuMjQwNTk4LTUuMjg0MTg0IDYuNzY2NjI1LTYuMDEzNDUgNi43NjY2MjUtNi45NTc5MDhaTTQuNjg2NDI2LTQuODQxODQzQzQuNDk1MTQzLTQuNzcwMTEyIDQuMzAzODYxLTQuNzQ2MjAyIDQuMDc2NzEyLTQuNzQ2MjAyQzMuOTA5MzQtNC43NDYyMDIgMy43NTM5MjMtNC43MzQyNDcgMy41Mzg3My00LjgwNTk3OEMzLjY1ODI4MS00Ljg4OTY2NCAzLjgzNzYwOS00LjkxMzU3NCA0LjA4ODY2Ny00LjkxMzU3NEM0LjMwMzg2MS00LjkxMzU3NCA0LjUxOTA1NC00Ljg4OTY2NCA0LjY4NjQyNi00Ljg0MTg0M1pNNi4xNDQ5NTYtNy4wNjU1MDRDNi4xNDQ5NTYtNi40MDc5NyA1LjgyMjE2Ny01LjQ1MTU1NyA1LjA0NTA4MS01LjAwOTIxNUM0LjgxNzkzMy01LjA5MjkwMiA0LjUwNzA5OC01LjE1MjY3NyA0LjI0NDA4NS01LjE1MjY3N0MzLjk5MzAyNi01LjE1MjY3NyAzLjI3NTcxNi01LjE3NjU4OCAzLjI3NTcxNi00Ljc5NDAyMkMzLjI3NTcxNi00LjQ3MTIzMyAzLjkzMzI1LTQuNTA3MDk4IDQuMTM2NDg4LTQuNTA3MDk4QzQuNDQ3MzIzLTQuNTA3MDk4IDQuNzIyMjkxLTQuNTc4ODI5IDUuMDA5MjE1LTQuNjYyNTE2QzUuMzkxNzgxLTQuMzUxNjgxIDUuNTU5MTUzLTMuOTQ1MjA1IDUuNTU5MTUzLTMuMzQ3NDQ3QzUuNTU5MTUzLTIuNjU0MDQ3IDUuMzY3ODctMi4wOTIxNTQgNS4xNDA3MjItMS41NzgwODJDNC43NDYyMDItLjY5MzQgMy44MTM2OTktLjExOTU1MiAyLjk4ODc5Mi0uMTE5NTUyQzIuMTE2MDY1LS4xMTk1NTIgMS42NjE3NjgtLjgxMjk1MSAxLjY2MTc2OC0xLjYyNTkwM0MxLjY2MTc2OC0xLjczMzQ5OSAxLjY2MTc2OC0xLjg4ODkxNyAxLjcwOTU4OS0yLjA2ODI0NEwyLjQ4NjY3NS01LjIxMjQ1M0MyLjg4MTE5Ni02Ljc3ODU4IDMuODg1NDMtOC4xODkyOSA1LjA0NTA4MS04LjE4OTI5QzUuOTA1ODUzLTguMTg5MjkgNi4xNDQ5NTYtNy41OTE1MzIgNi4xNDQ5NTYtNy4wNjU1MDRaJy8+CjxwYXRoIGlkPSdnNC0yMScgZD0nTTMuNjk0MTQ3LTcuNDQ4MDdDMy4zOTUyNjgtOC4yOTY4ODcgMi40NTA4MDktOC4yOTY4ODcgMi4yOTUzOTItOC4yOTY4ODdDMi4yMjM2NjEtOC4yOTY4ODcgMi4wOTIxNTQtOC4yOTY4ODcgMi4wOTIxNTQtOC4xNzczMzVDMi4wOTIxNTQtOC4wODE2OTQgMi4xNjM4ODUtOC4wNjk3MzggMi4yMjM2NjEtOC4wNTc3ODNDMi40MDI5ODktOC4wMzM4NzMgMi41NDY0NTEtOC4wMDk5NjMgMi43Mzc3MzMtNy42NjMyNjNDMi44NTcyODUtNy40MzYxMTUgNC4wODg2NjctMy44NjE1MTkgNC4wODg2NjctMy44Mzc2MDlDNC4wODg2NjctMy44MjU2NTQgNC4wNzY3MTItMy44MTM2OTkgMy45ODEwNzEtMy43MTgwNTdMLjg3MjcyNy0uNTczODQ4Qy43MjkyNjUtLjQzMDM4NiAuNjMzNjI0LS4zMzQ3NDUgLjYzMzYyNC0uMTc5MzI4Qy42MzM2MjQtLjAxMTk1NSAuNzc3MDg2IC4xMzE1MDcgLjk2ODM2OSAuMTMxNTA3QzEuMDE2MTg5IC4xMzE1MDcgMS4xNDc2OTYgLjEwNzU5NyAxLjIxOTQyNyAuMDM1ODY2QzEuNDEwNzEtLjE0MzQ2MiAzLjEyMDI5OS0yLjIzNTYxNiA0LjIwODIxOS0zLjUyNjc3NUM0LjUxOTA1NC0yLjU5NDI3MSA0LjkwMTYxOS0xLjQ5NDM5NiA1LjI3MjIyOS0uNDkwMTYyQzUuMzMyMDA1LS4zMTA4MzQgNS4zOTE3ODEtLjE0MzQ2MiA1LjU1OTE1MyAuMDExOTU1QzUuNjc4NzA1IC4xMTk1NTIgNS43MDI2MTUgLjExOTU1MiA2LjAzNzM2IC4xMTk1NTJINi4yNjQ1MDhDNi4zMTIzMjkgLjExOTU1MiA2LjM5NjAxNSAuMTE5NTUyIDYuMzk2MDE1IC4wMjM5MUM2LjM5NjAxNS0uMDIzOTEgNi4zODQwNi0uMDM1ODY2IDYuMzM2MjM5LS4wODM2ODZDNi4yMjg2NDMtLjIxNTE5MyA2LjE0NDk1Ni0uNDMwMzg2IDYuMDk3MTM2LS41NzM4NDhMMy42OTQxNDctNy40NDgwN1onLz4KPHBhdGggaWQ9J2c0LTI1JyBkPSdNMy4wOTYzODktNC41MDcwOThINC40NDczMjNDNC4xMjQ1MzMtMy4xNjgxMiAzLjkyMTI5NS0yLjI5NTM5MiAzLjkyMTI5NS0xLjMzODk3OUMzLjkyMTI5NS0xLjE3MTYwNiAzLjkyMTI5NSAuMTE5NTUyIDQuNDExNDU3IC4xMTk1NTJDNC42NjI1MTYgLjExOTU1MiA0Ljg3NzcwOS0uMTA3NTk3IDQuODc3NzA5LS4zMTA4MzRDNC44Nzc3MDktLjM3MDYxIDQuODc3NzA5LS4zOTQ1MjEgNC43OTQwMjItLjU3Mzg0OEM0LjQ3MTIzMy0xLjM5ODc1NSA0LjQ3MTIzMy0yLjQyNjg5OSA0LjQ3MTIzMy0yLjUxMDU4NUM0LjQ3MTIzMy0yLjU4MjMxNiA0LjQ3MTIzMy0zLjQzMTEzMyA0LjcyMjI5MS00LjUwNzA5OEg2LjA2MTI3QzYuMjE2Njg3LTQuNTA3MDk4IDYuNjExMjA4LTQuNTA3MDk4IDYuNjExMjA4LTQuODg5NjY0QzYuNjExMjA4LTUuMTUyNjc3IDYuMzg0MDYtNS4xNTI2NzcgNi4xNjg4NjctNS4xNTI2NzdIMi4yMzU2MTZDMS45NjA2NDgtNS4xNTI2NzcgMS41NTQxNzItNS4xNTI2NzcgMS4wMDQyMzQtNC41NjY4NzRDLjY5MzQtNC4yMjAxNzQgLjMxMDgzNC0zLjU4NjU1IC4zMTA4MzQtMy41MTQ4MTlTLjM3MDYxLTMuNDE5MTc4IC40NDIzNDEtMy40MTkxNzhDLjUyNjAyNy0zLjQxOTE3OCAuNTM3OTgzLTMuNDU1MDQ0IC41OTc3NTgtMy41MjY3NzVDMS4yMTk0MjctNC41MDcwOTggMS44NDEwOTYtNC41MDcwOTggMi4xMzk5NzUtNC41MDcwOThIMi44MjE0MkMyLjU1ODQwNi0zLjYxMDQ2MSAyLjI1OTUyNy0yLjU3MDM2MSAxLjI3OTIwMy0uNDc4MjA3QzEuMTgzNTYyLS4yODY5MjQgMS4xODM1NjItLjI2MzAxNCAxLjE4MzU2Mi0uMTkxMjgzQzEuMTgzNTYyIC4wNTk3NzYgMS4zOTg3NTUgLjExOTU1MiAxLjUwNjM1MSAuMTE5NTUyQzEuODUzMDUxIC4xMTk1NTIgMS45NDg2OTItLjE5MTI4MyAyLjA5MjE1NC0uNjkzNEMyLjI4MzQzNy0xLjMwMzExMyAyLjI4MzQzNy0xLjMyNzAyNCAyLjQwMjk4OS0xLjgwNTIzTDMuMDk2Mzg5LTQuNTA3MDk4WicvPgo8cGF0aCBpZD0nZzQtMjcnIGQ9J002LjA3MzIyNS00LjUwNzA5OEM2LjIyODY0My00LjUwNzA5OCA2LjYyMzE2My00LjUwNzA5OCA2LjYyMzE2My00Ljg4OTY2NEM2LjYyMzE2My01LjE1MjY3NyA2LjM5NjAxNS01LjE1MjY3NyA2LjE4MDgyMi01LjE1MjY3N0gzLjUzODczQzEuNzQ1NDU1LTUuMTUyNjc3IC40NTQyOTYtMy4xNTYxNjQgLjQ1NDI5Ni0xLjc0NTQ1NUMuNDU0Mjk2LS43MjkyNjUgMS4xMTE4MzEgLjExOTU1MiAyLjE4Nzc5NiAuMTE5NTUyQzMuNTk4NTA2IC4xMTk1NTIgNS4xNDA3MjItMS4zOTg3NTUgNS4xNDA3MjItMy4xOTIwM0M1LjE0MDcyMi0zLjY1ODI4MSA1LjAzMzEyNi00LjExMjU3OCA0Ljc0NjIwMi00LjUwNzA5OEg2LjA3MzIyNVpNMi4xOTk3NTEtLjExOTU1MkMxLjU5MDAzNy0uMTE5NTUyIDEuMTQ3Njk2LS41ODU4MDMgMS4xNDc2OTYtMS40MTA3MUMxLjE0NzY5Ni0yLjEyODAyIDEuNTc4MDgyLTQuNTA3MDk4IDMuMzM1NDkyLTQuNTA3MDk4QzMuODQ5NTY0LTQuNTA3MDk4IDQuNDIzNDEyLTQuMjU2MDQgNC40MjM0MTItMy4zMzU0OTJDNC40MjM0MTItMi45MTcwNjEgNC4yMzIxMy0xLjkxMjgyNyAzLjgxMzY5OS0xLjIxOTQyN0MzLjM4MzMxMy0uNTE0MDcyIDIuNzM3NzMzLS4xMTk1NTIgMi4xOTk3NTEtLjExOTU1MlonLz4KPHBhdGggaWQ9J2c0LTU5JyBkPSdNMi4zMzEyNTggLjA0NzgyMUMyLjMzMTI1OC0uNjQ1NTc5IDIuMTA0MTEtMS4xNTk2NTEgMS42MTM5NDgtMS4xNTk2NTFDMS4yMzEzODItMS4xNTk2NTEgMS4wNDAxLS44NDg4MTcgMS4wNDAxLS41ODU4MDNTMS4yMTk0MjcgMCAxLjYyNTkwMyAwQzEuNzgxMzIgMCAxLjkxMjgyNy0uMDQ3ODIxIDIuMDIwNDIzLS4xNTU0MTdDMi4wNDQzMzQtLjE3OTMyOCAyLjA1NjI4OS0uMTc5MzI4IDIuMDY4MjQ0LS4xNzkzMjhDMi4wOTIxNTQtLjE3OTMyOCAyLjA5MjE1NC0uMDExOTU1IDIuMDkyMTU0IC4wNDc4MjFDMi4wOTIxNTQgLjQ0MjM0MSAyLjAyMDQyMyAxLjIxOTQyNyAxLjMyNzAyNCAxLjk5NjUxM0MxLjE5NTUxNyAyLjEzOTk3NSAxLjE5NTUxNyAyLjE2Mzg4NSAxLjE5NTUxNyAyLjE4Nzc5NkMxLjE5NTUxNyAyLjI0NzU3MiAxLjI1NTI5MyAyLjMwNzM0NyAxLjMxNTA2OCAyLjMwNzM0N0MxLjQxMDcxIDIuMzA3MzQ3IDIuMzMxMjU4IDEuNDIyNjY1IDIuMzMxMjU4IC4wNDc4MjFaJy8+CjxwYXRoIGlkPSdnNC03NicgZD0nTTQuMzg3NTQ3LTcuMjQ0ODMyQzQuNDk1MTQzLTcuNjk5MTI4IDQuNTMxMDA5LTcuODE4NjggNS41ODMwNjQtNy44MTg2OEM1LjkwNTg1My03LjgxODY4IDUuOTg5NTM5LTcuODE4NjggNS45ODk1MzktOC4wNDU4MjhDNS45ODk1MzktOC4xNjUzOCA1Ljg1ODAzMi04LjE2NTM4IDUuODEwMjEyLTguMTY1MzhDNS41NzExMDgtOC4xNjUzOCA1LjI5NjEzOS04LjE0MTQ2OSA1LjA1NzAzNi04LjE0MTQ2OUgzLjQ1NTA0NEMzLjIyNzg5NS04LjE0MTQ2OSAyLjk2NDg4Mi04LjE2NTM4IDIuNzM3NzMzLTguMTY1MzhDMi42NDIwOTItOC4xNjUzOCAyLjUxMDU4NS04LjE2NTM4IDIuNTEwNTg1LTcuOTM4MjMyQzIuNTEwNTg1LTcuODE4NjggMi42MTgxODItNy44MTg2OCAyLjc5NzUwOS03LjgxODY4QzMuNTI2Nzc1LTcuODE4NjggMy41MjY3NzUtNy43MjMwMzkgMy41MjY3NzUtNy41OTE1MzJDMy41MjY3NzUtNy41Njc2MjEgMy41MjY3NzUtNy40OTU4OSAzLjQ3ODk1NC03LjMxNjU2M0wxLjg2NTAwNi0uODg0NjgyQzEuNzU3NDEtLjQ2NjI1MiAxLjczMzQ5OS0uMzQ2NyAuODk2NjM4LS4zNDY3Qy42Njk0ODktLjM0NjcgLjU0OTkzOC0uMzQ2NyAuNTQ5OTM4LS4xMzE1MDdDLjU0OTkzOCAwIC42MjE2NjkgMCAuODYwNzcyIDBINi4yMTY2ODdDNi40Nzk3MDEgMCA2LjQ5MTY1Ni0uMDExOTU1IDYuNTc1MzQyLS4yMjcxNDhMNy40OTU4OS0yLjc3MzU5OUM3LjUxOTgwMS0yLjgzMzM3NSA3LjU0MzcxMS0yLjkwNTEwNiA3LjU0MzcxMS0yLjk0MDk3MUM3LjU0MzcxMS0zLjAxMjcwMiA3LjQ4MzkzNS0zLjA2MDUyMyA3LjQyNDE1OS0zLjA2MDUyM0M3LjQxMjIwNC0zLjA2MDUyMyA3LjM1MjQyOC0zLjA2MDUyMyA3LjMyODUxOC0zLjAxMjcwMkM3LjMwNDYwOC0zLjAwMDc0NyA3LjMwNDYwOC0yLjk3NjgzNyA3LjIwODk2Ni0yLjc0OTY4OUM2LjgyNjQwMS0xLjY5NzYzNCA2LjI4ODQxOC0uMzQ2NyA0LjI2Nzk5NS0uMzQ2N0gzLjEyMDI5OUMyLjk1MjkyNy0uMzQ2NyAyLjkyOTAxNi0uMzQ2NyAyLjg1NzI4NS0uMzU4NjU1QzIuNzI1Nzc4LS4zNzA2MSAyLjcxMzgyMy0uMzk0NTIxIDIuNzEzODIzLS40OTAxNjJDMi43MTM4MjMtLjU3Mzg0OCAyLjczNzczMy0uNjQ1NTc5IDIuNzYxNjQ0LS43NTMxNzZMNC4zODc1NDctNy4yNDQ4MzJaJy8+CjxwYXRoIGlkPSdnNC0xMDQnIGQ9J00zLjM1OTQwMi03Ljk5ODAwN0MzLjM3MTM1Ny04LjA0NTgyOCAzLjM5NTI2OC04LjExNzU1OSAzLjM5NTI2OC04LjE3NzMzNUMzLjM5NTI2OC04LjI5Njg4NyAzLjI3NTcxNi04LjI5Njg4NyAzLjI1MTgwNi04LjI5Njg4N0MzLjIzOTg1MS04LjI5Njg4NyAyLjY1NDA0Ny04LjI0OTA2NiAyLjU5NDI3MS04LjIzNzExMUMyLjM5MTAzNC04LjIyNTE1NiAyLjIxMTcwNi04LjIwMTI0NSAxLjk5NjUxMy04LjE4OTI5QzEuNjk3NjM0LTguMTY1MzggMS42MTM5NDgtOC4xNTM0MjUgMS42MTM5NDgtNy45MzgyMzJDMS42MTM5NDgtNy44MTg2OCAxLjcwOTU4OS03LjgxODY4IDEuODc2OTYxLTcuODE4NjhDMi40NjI3NjUtNy44MTg2OCAyLjQ3NDcyLTcuNzExMDgzIDIuNDc0NzItNy41OTE1MzJDMi40NzQ3Mi03LjUxOTgwMSAyLjQ1MDgwOS03LjQyNDE1OSAyLjQzODg1NC03LjM4ODI5NEwuNzA1MzU1LS40NjYyNTJDLjY1NzUzNC0uMjg2OTI0IC42NTc1MzQtLjI2MzAxNCAuNjU3NTM0LS4xOTEyODNDLjY1NzUzNCAuMDcxNzMxIC44NjA3NzIgLjExOTU1MiAuOTgwMzI0IC4xMTk1NTJDMS4xODM1NjIgLjExOTU1MiAxLjMzODk3OS0uMDM1ODY2IDEuMzk4NzU1LS4xNjczNzJMMS45MzY3MzctMi4zMzEyNThDMS45OTY1MTMtMi41OTQyNzEgMi4wNjgyNDQtMi44NDUzMyAyLjEyODAyLTMuMTA4MzQ0QzIuMjU5NTI3LTMuNjEwNDYxIDIuMjU5NTI3LTMuNjIyNDE2IDIuNDg2Njc1LTMuOTY5MTE2UzMuMjUxODA2LTUuMDMzMTI2IDQuMTcyMzU0LTUuMDMzMTI2QzQuNjUwNTYtNS4wMzMxMjYgNC44MTc5MzMtNC42NzQ0NzEgNC44MTc5MzMtNC4xOTYyNjRDNC44MTc5MzMtMy41MjY3NzUgNC4zNTE2ODEtMi4yMjM2NjEgNC4wODg2NjctMS41MDYzNTFDMy45ODEwNzEtMS4yMTk0MjcgMy45MjEyOTUtMS4wNjQwMSAzLjkyMTI5NS0uODQ4ODE3QzMuOTIxMjk1LS4zMTA4MzQgNC4yOTE5MDUgLjExOTU1MiA0Ljg2NTc1MyAuMTE5NTUyQzUuOTc3NTg0IC4xMTk1NTIgNi4zOTYwMTUtMS42Mzc4NTggNi4zOTYwMTUtMS43MDk1ODlDNi4zOTYwMTUtMS43NjkzNjUgNi4zNDgxOTQtMS44MTcxODYgNi4yNzY0NjMtMS44MTcxODZDNi4xNjg4NjctMS44MTcxODYgNi4xNTY5MTItMS43ODEzMiA2LjA5NzEzNi0xLjU3ODA4MkM1LjgyMjE2Ny0uNjIxNjY5IDUuMzc5ODI2LS4xMTk1NTIgNC45MDE2MTktLjExOTU1MkM0Ljc4MjA2Ny0uMTE5NTUyIDQuNTkwNzg1LS4xMzE1MDcgNC41OTA3ODUtLjUxNDA3MkM0LjU5MDc4NS0uODI0OTA3IDQuNzM0MjQ3LTEuMjA3NDcyIDQuNzgyMDY3LTEuMzM4OTc5QzQuOTk3MjYtMS45MTI4MjcgNS41MzUyNDMtMy4zMjM1MzcgNS41MzUyNDMtNC4wMTY5MzZDNS41MzUyNDMtNC43MzQyNDcgNS4xMTY4MTItNS4yNzIyMjkgNC4yMDgyMTktNS4yNzIyMjlDMy41MjY3NzUtNS4yNzIyMjkgMi45MjkwMTYtNC45NDk0NCAyLjQzODg1NC00LjMyNzc3MUwzLjM1OTQwMi03Ljk5ODAwN1onLz4KPHBhdGggaWQ9J2c0LTEyMCcgZD0nTTUuNjY2NzUtNC44Nzc3MDlDNS4yODQxODQtNC44MDU5NzggNS4xNDA3MjItNC41MTkwNTQgNS4xNDA3MjItNC4yOTE5MDVDNS4xNDA3MjItNC4wMDQ5ODEgNS4zNjc4Ny0zLjkwOTM0IDUuNTM1MjQzLTMuOTA5MzRDNS44OTM4OTgtMy45MDkzNCA2LjE0NDk1Ni00LjIyMDE3NCA2LjE0NDk1Ni00LjU0Mjk2NEM2LjE0NDk1Ni01LjA0NTA4MSA1LjU3MTEwOC01LjI3MjIyOSA1LjA2ODk5MS01LjI3MjIyOUM0LjMzOTcyNi01LjI3MjIyOSAzLjkzMzI1LTQuNTU0OTE5IDMuODI1NjU0LTQuMzI3NzcxQzMuNTUwNjg1LTUuMjI0NDA4IDIuODA5NDY1LTUuMjcyMjI5IDIuNTk0MjcxLTUuMjcyMjI5QzEuMzc0ODQ0LTUuMjcyMjI5IC43MjkyNjUtMy43MDYxMDIgLjcyOTI2NS0zLjQ0MzA4OEMuNzI5MjY1LTMuMzk1MjY4IC43NzcwODYtMy4zMzU0OTIgLjg2MDc3Mi0zLjMzNTQ5MkMuOTU2NDEzLTMuMzM1NDkyIC45ODAzMjQtMy40MDcyMjMgMS4wMDQyMzQtMy40NTUwNDRDMS40MTA3MS00Ljc4MjA2NyAyLjIxMTcwNi01LjAzMzEyNiAyLjU1ODQwNi01LjAzMzEyNkMzLjA5NjM4OS01LjAzMzEyNiAzLjIwMzk4NS00LjUzMTAwOSAzLjIwMzk4NS00LjI0NDA4NUMzLjIwMzk4NS0zLjk4MTA3MSAzLjEzMjI1NC0zLjcwNjEwMiAyLjk4ODc5Mi0zLjEzMjI1NEwyLjU4MjMxNi0xLjQ5NDM5NkMyLjQwMjk4OS0uNzc3MDg2IDIuMDU2Mjg5LS4xMTk1NTIgMS40MjI2NjUtLjExOTU1MkMxLjM2Mjg4OS0uMTE5NTUyIDEuMDY0MDEtLjExOTU1MiAuODEyOTUxLS4yNzQ5NjlDMS4yNDMzMzctLjM1ODY1NSAxLjMzODk3OS0uNzE3MzEgMS4zMzg5NzktLjg2MDc3MkMxLjMzODk3OS0xLjA5OTg3NSAxLjE1OTY1MS0xLjI0MzMzNyAuOTMyNTAzLTEuMjQzMzM3Qy42NDU1NzktMS4yNDMzMzcgLjMzNDc0NS0uOTkyMjc5IC4zMzQ3NDUtLjYwOTcxNEMuMzM0NzQ1LS4xMDc1OTcgLjg5NjYzOCAuMTE5NTUyIDEuNDEwNzEgLjExOTU1MkMxLjk4NDU1OCAuMTE5NTUyIDIuMzkxMDM0LS4zMzQ3NDUgMi42NDIwOTItLjgyNDkwN0MyLjgzMzM3NS0uMTE5NTUyIDMuNDMxMTMzIC4xMTk1NTIgMy44NzM0NzQgLjExOTU1MkM1LjA5MjkwMiAuMTE5NTUyIDUuNzM4NDgxLTEuNDQ2NTc1IDUuNzM4NDgxLTEuNzA5NTg5QzUuNzM4NDgxLTEuNzY5MzY1IDUuNjkwNjYtMS44MTcxODYgNS42MTg5MjktMS44MTcxODZDNS41MTEzMzMtMS44MTcxODYgNS40OTkzNzctMS43NTc0MSA1LjQ2MzUxMi0xLjY2MTc2OEM1LjE0MDcyMi0uNjA5NzE0IDQuNDQ3MzIzLS4xMTk1NTIgMy45MDkzNC0uMTE5NTUyQzMuNDkwOTA5LS4xMTk1NTIgMy4yNjM3NjEtLjQzMDM4NiAzLjI2Mzc2MS0uOTIwNTQ4QzMuMjYzNzYxLTEuMTgzNTYyIDMuMzExNTgyLTEuMzc0ODQ0IDMuNTAyODY0LTIuMTYzODg1TDMuOTIxMjk1LTMuNzg5Nzg4QzQuMTAwNjIzLTQuNTA3MDk4IDQuNTA3MDk4LTUuMDMzMTI2IDUuMDU3MDM2LTUuMDMzMTI2QzUuMDgwOTQ2LTUuMDMzMTI2IDUuNDE1NjkxLTUuMDMzMTI2IDUuNjY2NzUtNC44Nzc3MDlaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PSc0Ljk4MTMzNScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTc2Jy8+Cjx1c2UgeD0nMTIuOTQ1ODQyJyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxNy40OTgxNjcnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0xMicvPgo8dXNlIHg9JzI0Ljc2OTQzOCcgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTU5Jy8+Cjx1c2UgeD0nMzAuMDEzNTk3JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtMjcnLz4KPHVzZSB4PSczNi40NDU2NjknIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC01OScvPgo8dXNlIHg9JzQxLjY4OTgyOCcgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTIxJy8+Cjx1c2UgeD0nNDguNTE4MzE2JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PSc2My4wMzMyOTQnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi02MScvPgo8dXNlIHg9Jzk5LjI5ODYzNScgeT0nLTQxLjk1NjM1NycgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+CjxyZWN0IHg9JzgzLjI5NjExNCcgeT0nLTM3LjA5NjQ4NCcgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nMzcuODU4MDE3Jy8+Cjx1c2UgeD0nODMuMjk2MTE0JyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PSc4Ny44NDg0NCcgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c2LTUwJy8+Cjx1c2UgeD0nOTMuNzAxNDMnIHk9Jy0yNS42Njc5MzYnIHhsaW5rOmhyZWY9JyNnNC0yNScvPgo8dXNlIHg9JzEwMC43NzA3JyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PScxMDUuMzIzMDI2JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNzgnLz4KPHVzZSB4PScxMTIuMTg3NjM0JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNjEnLz4KPHVzZSB4PScxMTYuNDIxODE3JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzUtNTAnLz4KPHVzZSB4PScxMjUuMDA2MzA5JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzItMicvPgo8dXNlIHg9JzE1My42MDU3MzQnIHk9Jy00MS45NTYzNTcnIHhsaW5rOmhyZWY9JyNnNi00OScvPgo8cmVjdCB4PScxMzguMTU2OTgzJyB5PSctMzcuMDk2NDg0JyBoZWlnaHQ9Jy40NzgxODcnIHdpZHRoPSczNi43NTA0NzYnLz4KPHVzZSB4PScxMzguMTU2OTgzJyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxNDIuNzA5MzA5JyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzQtMjcnLz4KPHVzZSB4PScxNDkuNzkxNzEzJyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzUtNTAnLz4KPHVzZSB4PScxNTQuNTI0MDI4JyB5PSctMjUuNjY3OTM2JyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PScxNTkuMDc2MzUzJyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNzgnLz4KPHVzZSB4PScxNjUuOTQwOTYxJyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzMtNjEnLz4KPHVzZSB4PScxNzAuMTc1MTQ0JyB5PSctMjkuMTIxNjQ0JyB4bGluazpocmVmPScjZzUtNTAnLz4KPHVzZSB4PScxNzguNzU5NjM2JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzItMicvPgo8dXNlIHg9JzE5MC43MTQ3OTcnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi0xMDEnLz4KPHVzZSB4PScxOTUuOTE3NDU1JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtMTIwJy8+Cjx1c2UgeD0nMjAyLjA5NTYxMScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTExMicvPgo8dXNlIHg9JzIxMC41OTE0MzEnIHk9Jy01NC4zMTIxMjInIHhsaW5rOmhyZWY9JyNnMC0zNCcvPgo8dXNlIHg9JzIxNy41NjUzMScgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2cyLTAnLz4KPHVzZSB4PScyMzMuOTY2Njg4JyB5PSctNDEuOTU2MzU3JyB4bGluazpocmVmPScjZzYtNDknLz4KPHJlY3QgeD0nMjI4LjA1OTMyMScgeT0nLTM3LjA5NjQ4NCcgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nMTcuNjY3NzA5Jy8+Cjx1c2UgeD0nMjI4LjA1OTMyMScgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c2LTUwJy8+Cjx1c2UgeD0nMjMzLjkxMjMxMScgeT0nLTI1LjY2NzkzNicgeGxpbms6aHJlZj0nI2c0LTI3Jy8+Cjx1c2UgeD0nMjQwLjk5NDcxNScgeT0nLTI5LjEyMTY0NCcgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMjQ4LjkxNTA0MScgeT0nLTQ4LjgxMjYxOScgeGxpbms6aHJlZj0nI2czLTc4Jy8+Cjx1c2UgeD0nMjU2LjQ4NTM0NicgeT0nLTQ4LjgxMjYxOScgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PScyNjMuMDcxODUzJyB5PSctNDguODEyNjE5JyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PScyNDkuNDc2MjMnIHk9Jy00NS4yMjYwNjMnIHhsaW5rOmhyZWY9JyNnMC04OCcvPgo8dXNlIHg9JzI1MC4zODkzODYnIHk9Jy0xOS43NjU4NDQnIHhsaW5rOmhyZWY9JyNnMy0xMDcnLz4KPHVzZSB4PScyNTUuMDExMDAyJyB5PSctMTkuNzY1ODQ0JyB4bGluazpocmVmPScjZzUtNjEnLz4KPHVzZSB4PScyNjEuNTk3NTA4JyB5PSctMTkuNzY1ODQ0JyB4bGluazpocmVmPScjZzUtNDgnLz4KPHVzZSB4PScyNjkuMjk4NTM0JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScyNzMuODUwODU5JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzQtMTA0Jy8+Cjx1c2UgeD0nMjgwLjU4OTQxNCcgeT0nLTMyLjA3NTMzNScgeGxpbms6aHJlZj0nI2czLTIxJy8+Cjx1c2UgeD0nMjg2LjAyNzQyNicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMjkwLjU3OTc1MicgeT0nLTMzLjg2ODU5OCcgeGxpbms6aHJlZj0nI2c0LTEyMCcvPgo8dXNlIHg9JzI5Ny4yMzE4MzknIHk9Jy0zMi4wNzUzMzUnIHhsaW5rOmhyZWY9JyNnMy0xMDcnLz4KPHVzZSB4PSczMDIuMzUxNTg3JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PSczMDkuNTYwNTc2JyB5PSctMzMuODY4NTk4JyB4bGluazpocmVmPScjZzItMCcvPgo8dXNlIHg9JzMyMS41MTU3MzYnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0xMicvPgo8dXNlIHg9JzMyOC43ODcwMDcnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzMzMy4zMzkzMjUnIHk9Jy0zOS42ODAxMzMnIHhsaW5rOmhyZWY9JyNnNS01MCcvPgo8dXNlIHg9JzMzOC4wNzE2NCcgeT0nLTU0LjMxMjEyMicgeGxpbms6aHJlZj0nI2cwLTM1Jy8+Cjx1c2UgeD0nODIuMTAwNjAxJyB5PSctMTQuMTQ2OTQ2JyB4bGluazpocmVmPScjZzAtMTI0Jy8+CjxyZWN0IHg9Jzg3LjQ4MDQ4MScgeT0nLTE1LjU4MTUzOCcgaGVpZ2h0PScxLjQzNDU5Micgd2lkdGg9JzEyMC43MTI2ODcnLz4KPHVzZSB4PScyMDguMTkzMTY4JyB5PSctMTQuMTQ2OTQ2JyB4bGluazpocmVmPScjZzAtMTIzJy8+Cjx1c2UgeD0nMjEzLjU3MzA0OCcgeT0nLTE0LjE0Njk0NicgeGxpbms6aHJlZj0nI2cwLTEyMicvPgo8cmVjdCB4PScyMTguOTUyOTI5JyB5PSctMTUuNTgxNTM4JyBoZWlnaHQ9JzEuNDM0NTkyJyB3aWR0aD0nMTIwLjcxMjY4NycvPgo8dXNlIHg9JzMzOS42NjU2MTYnIHk9Jy0xNC4xNDY5NDYnIHhsaW5rOmhyZWY9JyNnMC0xMjUnLz4KPHVzZSB4PScyMDAuNjY3MTE1JyB5PSctMy4xODgwNDInIHhsaW5rOmhyZWY9JyNnNS05Jy8+Cjx1c2UgeD0nMjA3LjI1MzYyMicgeT0nLTMuMTg4MDQyJyB4bGluazpocmVmPScjZzUtNDAnLz4KPHVzZSB4PScyMTAuNTQ2ODc1JyB5PSctMy4xODgwNDInIHhsaW5rOmhyZWY9JyNnMy0xMicvPgo8dXNlIHg9JzIxNS43MDgxMjMnIHk9Jy0zLjE4ODA0MicgeGxpbms6aHJlZj0nI2czLTU5Jy8+Cjx1c2UgeD0nMjE4LjA2MDQ0NycgeT0nLTMuMTg4MDQyJyB4bGluazpocmVmPScjZzMtMjcnLz4KPHVzZSB4PScyMjMuMTg1NzQzJyB5PSctMy4xODgwNDInIHhsaW5rOmhyZWY9JyNnNS00MScvPgo8dXNlIHg9JzM0Ny4wMzc5OTQnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnMi0yJy8+Cjx1c2UgeD0nMzU4LjMyODk4OCcgeT0nLTQyLjgzNTA1JyB4bGluazpocmVmPScjZzAtODEnLz4KPHVzZSB4PSczNjkuNjIwMDA2JyB5PSctMzkuNjgwMjA5JyB4bGluazpocmVmPScjZzMtNzgnLz4KPHVzZSB4PSczNzcuMTkwMzExJyB5PSctMzkuNjgwMjA5JyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzM4My43NzY4MTcnIHk9Jy0zOS42ODAyMDknIHhsaW5rOmhyZWY9JyNnNS00OScvPgo8dXNlIHg9JzM2OS42MjAwMDYnIHk9Jy0zMC4zODE1OTgnIHhsaW5rOmhyZWY9JyNnMy0xMDcnLz4KPHVzZSB4PSczNzQuMjQxNjIxJyB5PSctMzAuMzgxNTk4JyB4bGluazpocmVmPScjZzUtNjEnLz4KPHVzZSB4PSczODAuODI4MTI4JyB5PSctMzAuMzgxNTk4JyB4bGluazpocmVmPScjZzUtNDgnLz4KPHVzZSB4PSczOTAuNTAxNjMnIHk9Jy0zMy44Njg1OTgnIHhsaW5rOmhyZWY9JyNnNC0xMjAnLz4KPHVzZSB4PSczOTcuMTUzNzE3JyB5PSctMzguODE2NzMzJyB4bGluazpocmVmPScjZzMtMjEnLz4KPHVzZSB4PSc0MDIuMDkzNTk3JyB5PSctMzguODE2NzMzJyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzQwOC42ODAxMDQnIHk9Jy0zOC44MTY3MzMnIHhsaW5rOmhyZWY9JyNnNS00OScvPgo8dXNlIHg9JzM5Ny4xNTM3MTcnIHk9Jy0zMC41Mzg5MjEnIHhsaW5rOmhyZWY9JyNnMy0xMDcnLz4KPC9nPgo8L3N2Zz4KPCEtLSBERVBUSD0wIC0tPg==)
We notice that for each fixed
, the likelihood equation is proportional to the likelihood equation which estimates  .
.Thus, the maximum likelihood estimators for
 for a given are :
for a given are :
Substituting these expressions in the likelihood equation and taking the
 likelihood leads to:
likelihood leads to:![\begin{array}{lcl}
\ell(\lambda) = \log L( \hat{\beta}(\lambda), \hat{\sigma}(\lambda),\lambda ) & = & C -
\frac{N}{2}
\log\left[\hat{\sigma}^2(\lambda)\right]
\;+\;
\left(\lambda - 1 \right) \sum_{k=0}^{N-1} \log(x_i)\,,%\qquad mbox{where :math:`C` is a constant.}
\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuNC4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzM4Mi45NTY4MDdwdCcgaGVpZ2h0PScxNS41Nzk2MzRwdCcgdmlld0JveD0nNC45ODEzMzUgLTE1LjY0MTM1MyAzODIuOTU2ODA3IDE1LjU3OTYzNCc+CjxkZWZzPgo8cGF0aCBpZD0nZzAtODAnIGQ9J001LjAzMzEyNiA2LjM4NDA2TC43ODkwNDEgMTEuNjMyMzc5Qy42OTM0IDExLjc1MTkzIC42ODE0NDUgMTEuNzc1ODQxIC42ODE0NDUgMTEuODIzNjYxQy42ODE0NDUgMTEuOTU1MTY4IC43ODkwNDEgMTEuOTU1MTY4IDEuMDA0MjM0IDExLjk1NTE2OEgxMC45MTUwNjhMMTEuOTQzMjEzIDguOTc4MzMxSDExLjY0NDMzNEMxMS4zNDU0NTUgOS44NzQ5NjkgMTAuNTQ0NDU4IDEwLjYwNDIzNCA5LjUyODI2OSAxMC45NTA5MzRDOS4zMzY5ODYgMTEuMDEwNzEgOC41MTIwOCAxMS4yOTc2MzQgNi43NTQ2NyAxMS4yOTc2MzRIMS42NzM3MjRMNS44MjIxNjcgNi4xNjg4NjdDNS45MDU4NTMgNi4wNjEyNyA1LjkyOTc2MyA2LjAyNTQwNSA1LjkyOTc2MyA1Ljk3NzU4NFM1LjkxNzgwOCA1LjkxNzgwOCA1Ljg0NjA3NyA1LjgxMDIxMkwxLjk2MDY0OCAuNDc4MjA3SDYuNjk0ODk0QzguMDU3NzgzIC40NzgyMDcgMTAuODA3NDcyIC41NjE4OTMgMTEuNjQ0MzM0IDIuNzk3NTA5SDExLjk0MzIxM0wxMC45MTUwNjggMEgxLjAwNDIzNEMuNjgxNDQ1IDAgLjY2OTQ4OSAuMDExOTU1IC42Njk0ODkgLjM4MjU2NUw1LjAzMzEyNiA2LjM4NDA2WicvPgo8cGF0aCBpZD0nZzUtNDgnIGQ9J00zLjg5NzM4NS0yLjU0MjQ2NkMzLjg5NzM4NS0zLjM5NTI2OCAzLjgwOTcxNC0zLjkxMzMyNSAzLjU0NjctNC40MjM0MTJDMy4xOTYwMTUtNS4xMjQ3ODIgMi41NTA0MzYtNS4zMDAxMjUgMi4xMTIwOC01LjMwMDEyNUMxLjEwNzg0Ni01LjMwMDEyNSAuNzQxMjItNC41NTA5MzQgLjYyOTYzOS00LjMyNzc3MUMuMzQyNzE1LTMuNzQ1OTUzIC4zMjY3NzUtMi45NTY5MTIgLjMyNjc3NS0yLjU0MjQ2NkMuMzI2Nzc1LTIuMDE2NDM4IC4zNTA2ODUtMS4yMTE0NTcgLjczMzI1LS41NzM4NDhDMS4wOTk4NzUgLjAxNTk0IDEuNjg5NjY0IC4xNjczNzIgMi4xMTIwOCAuMTY3MzcyQzIuNDk0NjQ1IC4xNjczNzIgMy4xODAwNzUgLjA0NzgyMSAzLjU3ODU4LS43NDEyMkMzLjg3MzQ3NC0xLjMxNTA2OCAzLjg5NzM4NS0yLjAyNDQwOCAzLjg5NzM4NS0yLjU0MjQ2NlpNMi4xMTIwOC0uMDU1NzkxQzEuODQxMDk2LS4wNTU3OTEgMS4yOTExNTgtLjE4MzMxMyAxLjEyMzc4Ni0xLjAyMDE3NEMxLjAzNjExNS0xLjQ3NDQ3MSAxLjAzNjExNS0yLjIyMzY2MSAxLjAzNjExNS0yLjYzODEwN0MxLjAzNjExNS0zLjE4ODA0NSAxLjAzNjExNS0zLjc0NTk1MyAxLjEyMzc4Ni00LjE4NDMwOUMxLjI5MTE1OC00Ljk5NzI2IDEuOTEyODI3LTUuMDc2OTYxIDIuMTEyMDgtNS4wNzY5NjFDMi4zODMwNjQtNS4wNzY5NjEgMi45MzMwMDEtNC45NDE0NjkgMy4wOTI0MDMtNC4yMTYxODlDMy4xODgwNDUtMy43Nzc4MzMgMy4xODgwNDUtMy4xODAwNzUgMy4xODgwNDUtMi42MzgxMDdDMy4xODgwNDUtMi4xNjc4NyAzLjE4ODA0NS0xLjQ1MDU2IDMuMDkyNDAzLTEuMDA0MjM0QzIuOTI1MDMxLS4xNjczNzIgMi4zNzUwOTMtLjA1NTc5MSAyLjExMjA4LS4wNTU3OTFaJy8+CjxwYXRoIGlkPSdnNS00OScgZD0nTTIuNTAyNjE1LTUuMDc2OTYxQzIuNTAyNjE1LTUuMjkyMTU0IDIuNDg2Njc1LTUuMzAwMTI1IDIuMjcxNDgyLTUuMzAwMTI1QzEuOTQ0NzA3LTQuOTgxMzIgMS41MjIyOTEtNC43OTAwMzcgLjc2NTEzMS00Ljc5MDAzN1YtNC41MjcwMjRDLjk4MDMyNC00LjUyNzAyNCAxLjQxMDcxLTQuNTI3MDI0IDEuODcyOTc2LTQuNzQyMjE3Vi0uNjUzNTQ5QzEuODcyOTc2LS4zNTg2NTUgMS44NDkwNjYtLjI2MzAxNCAxLjA5MTkwNS0uMjYzMDE0SC44MTI5NTFWMEMxLjEzOTcyNi0uMDIzOTEgMS44MjUxNTYtLjAyMzkxIDIuMTgzODExLS4wMjM5MVMzLjIzNTg2Ni0uMDIzOTEgMy41NjI2NCAwVi0uMjYzMDE0SDMuMjgzNjg2QzIuNTI2NTI2LS4yNjMwMTQgMi41MDI2MTUtLjM1ODY1NSAyLjUwMjYxNS0uNjUzNTQ5Vi01LjA3Njk2MVonLz4KPHBhdGggaWQ9J2c1LTUwJyBkPSdNMi4yNDc1NzItMS42MjU5MDNDMi4zNzUwOTMtMS43NDU0NTUgMi43MDk4MzgtMi4wMDg0NjggMi44MzczNi0yLjEyMDA1QzMuMzMxNTA3LTIuNTc0MzQ2IDMuODAxNzQzLTMuMDEyNzAyIDMuODAxNzQzLTMuNzM3OTgzQzMuODAxNzQzLTQuNjg2NDI2IDMuMDA0NzMyLTUuMzAwMTI1IDIuMDA4NDY4LTUuMzAwMTI1QzEuMDUyMDU1LTUuMzAwMTI1IC40MjI0MTYtNC41NzQ4NDQgLjQyMjQxNi0zLjg2NTUwNEMuNDIyNDE2LTMuNDc0OTY5IC43MzMyNS0zLjQxOTE3OCAuODQ0ODMyLTMuNDE5MTc4QzEuMDEyMjA0LTMuNDE5MTc4IDEuMjU5Mjc4LTMuNTM4NzMgMS4yNTkyNzgtMy44NDE1OTRDMS4yNTkyNzgtNC4yNTYwNCAuODYwNzcyLTQuMjU2MDQgLjc2NTEzMS00LjI1NjA0Qy45OTYyNjQtNC44Mzc4NTggMS41MzAyNjItNS4wMzcxMTEgMS45MjA3OTctNS4wMzcxMTFDMi42NjIwMTctNS4wMzcxMTEgMy4wNDQ1ODMtNC40MDc0NzIgMy4wNDQ1ODMtMy43Mzc5ODNDMy4wNDQ1ODMtMi45MDkwOTEgMi40NjI3NjUtMi4zMDMzNjIgMS41MjIyOTEtMS4zMzg5NzlMLjUxODA1Ny0uMzAyODY0Qy40MjI0MTYtLjIxNTE5MyAuNDIyNDE2LS4xOTkyNTMgLjQyMjQxNiAwSDMuNTcwNjFMMy44MDE3NDMtMS40MjY2NUgzLjU1NDY3QzMuNTMwNzYtMS4yNjcyNDggMy40NjY5OTktLjg2ODc0MiAzLjM3MTM1Ny0uNzE3MzFDMy4zMjM1MzctLjY1MzU0OSAyLjcxNzgwOC0uNjUzNTQ5IDIuNTkwMjg2LS42NTM1NDlIMS4xNzE2MDZMMi4yNDc1NzItMS42MjU5MDNaJy8+CjxwYXRoIGlkPSdnNS02MScgZD0nTTUuODI2MTUyLTIuNjU0MDQ3QzUuOTQ1NzA0LTIuNjU0MDQ3IDYuMTA1MTA2LTIuNjU0MDQ3IDYuMTA1MTA2LTIuODM3MzZTNS45MTM4MjMtMy4wMjA2NzIgNS43OTQyNzEtMy4wMjA2NzJILjc4MTA3MUMuNjYxNTE5LTMuMDIwNjcyIC40NzAyMzctMy4wMjA2NzIgLjQ3MDIzNy0yLjgzNzM2Uy42Mjk2MzktMi42NTQwNDcgLjc0OTE5MS0yLjY1NDA0N0g1LjgyNjE1MlpNNS43OTQyNzEtLjk2NDM4NEM1LjkxMzgyMy0uOTY0Mzg0IDYuMTA1MTA2LS45NjQzODQgNi4xMDUxMDYtMS4xNDc2OTZTNS45NDU3MDQtMS4zMzEwMDkgNS44MjYxNTItMS4zMzEwMDlILjc0OTE5MUMuNjI5NjM5LTEuMzMxMDA5IC40NzAyMzctMS4zMzEwMDkgLjQ3MDIzNy0xLjE0NzY5NlMuNjYxNTE5LS45NjQzODQgLjc4MTA3MS0uOTY0Mzg0SDUuNzk0MjcxWicvPgo8cGF0aCBpZD0nZzMtNzgnIGQ9J002LjMxMjMyOS00LjU3NDg0NEM2LjQwNzk3LTQuOTY1MzggNi41ODMzMTMtNS4xNTY2NjMgNy4xNTcxNjEtNS4xODA1NzNDNy4yMzY4NjItNS4xODA1NzMgNy4zMDA2MjMtNS4yMjgzOTQgNy4zMDA2MjMtNS4zMzIwMDVDNy4zMDA2MjMtNS4zNzk4MjYgNy4yNjA3NzItNS40NDM1ODcgNy4xODEwNzEtNS40NDM1ODdDNy4xMjUyOC01LjQ0MzU4NyA2Ljk3Mzg0OC01LjQxOTY3NiA2LjM4NDA2LTUuNDE5Njc2QzUuNzQ2NDUxLTUuNDE5Njc2IDUuNjQyODM5LTUuNDQzNTg3IDUuNTcxMTA4LTUuNDQzNTg3QzUuNDQzNTg3LTUuNDQzNTg3IDUuNDE5Njc2LTUuMzU1OTE1IDUuNDE5Njc2LTUuMjkyMTU0QzUuNDE5Njc2LTUuMTg4NTQzIDUuNTIzMjg4LTUuMTgwNTczIDUuNTk1MDE5LTUuMTgwNTczQzYuMDgxMTk2LTUuMTY0NjMzIDYuMDgxMTk2LTQuOTQ5NDQgNi4wODExOTYtNC44Mzc4NThDNi4wODExOTYtNC43OTgwMDcgNi4wODExOTYtNC43NTgxNTcgNi4wNDkzMTUtNC42MzA2MzVMNS4xNzI2MDMtMS4xMzk3MjZMMy4yNTE4MDYtNS4zMDAxMjVDMy4xODgwNDUtNS40NDM1ODcgMy4xNzIxMDUtNS40NDM1ODcgMi45ODA4MjItNS40NDM1ODdIMS45NDQ3MDdDMS44MDEyNDUtNS40NDM1ODcgMS42OTc2MzQtNS40NDM1ODcgMS42OTc2MzQtNS4yOTIxNTRDMS42OTc2MzQtNS4xODA1NzMgMS43OTMyNzUtNS4xODA1NzMgMS45NjA2NDgtNS4xODA1NzNDMi4wMjQ0MDgtNS4xODA1NzMgMi4yNjM1MTItNS4xODA1NzMgMi40NDY4MjQtNS4xMzI3NTJMMS4zNzg4MjktLjg1MjgwMkMxLjI4MzE4OC0uNDU0Mjk2IDEuMDc1OTY1LS4yNzg5NTQgLjU0MTk2OC0uMjYzMDE0Qy40OTQxNDctLjI2MzAxNCAuMzk4NTA2LS4yNTUwNDQgLjM5ODUwNi0uMTExNTgyQy4zOTg1MDYtLjA2Mzc2MSAuNDM4MzU2IDAgLjUxODA1NyAwQy41NDk5MzggMCAuNzMzMjUtLjAyMzkxIDEuMzA3MDk4LS4wMjM5MUMxLjkzNjczNy0uMDIzOTEgMi4wNTYyODkgMCAyLjEyODAyIDBDMi4xNTk5IDAgMi4yNzk0NTIgMCAyLjI3OTQ1Mi0uMTUxNDMyQzIuMjc5NDUyLS4yNDcwNzMgMi4xOTE3ODEtLjI2MzAxNCAyLjEzNTk5LS4yNjMwMTRDMS44NDkwNjYtLjI3MDk4NCAxLjYwOTk2My0uMzE4ODA0IDEuNjA5OTYzLS41OTc3NThDMS42MDk5NjMtLjYzNzYwOSAxLjYzMzg3My0uNzQ5MTkxIDEuNjMzODczLS43NTcxNjFMMi42Nzc5NTgtNC45MTc1NTlIMi42ODU5MjhMNC45MDE2MTktLjE0MzQ2MkM0Ljk1NzQxLS4wMTU5NCA0Ljk2NTM4IDAgNS4wNTMwNTEgMEM1LjE2NDYzMyAwIDUuMTcyNjAzLS4wMzE4OCA1LjIwNDQ4My0uMTY3MzcyTDYuMzEyMzI5LTQuNTc0ODQ0WicvPgo8cGF0aCBpZD0nZzMtMTA1JyBkPSdNMi4zNzUwOTMtNC45NzMzNUMyLjM3NTA5My01LjE0ODY5MiAyLjI0NzU3Mi01LjI3NjIxNCAyLjA2NDI1OS01LjI3NjIxNEMxLjg1NzAzNi01LjI3NjIxNCAxLjYyNTkwMy01LjA4NDkzMiAxLjYyNTkwMy00Ljg0NTgyOEMxLjYyNTkwMy00LjY3MDQ4NiAxLjc1MzQyNS00LjU0Mjk2NCAxLjkzNjczNy00LjU0Mjk2NEMyLjE0Mzk2LTQuNTQyOTY0IDIuMzc1MDkzLTQuNzM0MjQ3IDIuMzc1MDkzLTQuOTczMzVaTTEuMjExNDU3LTIuMDQ4MzE5TC43ODEwNzEtLjk0ODQ0M0MuNzQxMjItLjgyODg5MiAuNzAxMzctLjczMzI1IC43MDEzNy0uNTk3NzU4Qy43MDEzNy0uMjA3MjIzIDEuMDA0MjM0IC4wNzk3MDEgMS40MjY2NSAuMDc5NzAxQzIuMTk5NzUxIC4wNzk3MDEgMi41MjY1MjYtMS4wMzYxMTUgMi41MjY1MjYtMS4xMzk3MjZDMi41MjY1MjYtMS4yMTk0MjcgMi40NjI3NjUtMS4yNDMzMzcgMi40MDY5NzQtMS4yNDMzMzdDMi4zMTEzMzMtMS4yNDMzMzcgMi4yOTUzOTItMS4xODc1NDcgMi4yNzE0ODItMS4xMDc4NDZDMi4wODgxNjktLjQ3MDIzNyAxLjc2MTM5NS0uMTQzNDYyIDEuNDQyNTktLjE0MzQ2MkMxLjM0Njk0OS0uMTQzNDYyIDEuMjUxMzA4LS4xODMzMTMgMS4yNTEzMDgtLjM5ODUwNkMxLjI1MTMwOC0uNTg5Nzg4IDEuMzA3MDk4LS43MzMyNSAxLjQxMDcxLS45ODAzMjRDMS40OTA0MTEtMS4xOTU1MTcgMS41NzAxMTItMS40MTA3MSAxLjY1Nzc4My0xLjYyNTkwM0wxLjkwNDg1Ny0yLjI3MTQ4MkMxLjk3NjU4OC0yLjQ1NDc5NSAyLjA3MjIyOS0yLjcwMTg2OCAyLjA3MjIyOS0yLjgzNzM2QzIuMDcyMjI5LTMuMjM1ODY2IDEuNzUzNDI1LTMuNTE0ODE5IDEuMzQ2OTQ5LTMuNTE0ODE5Qy41NzM4NDgtMy41MTQ4MTkgLjIzOTEwMy0yLjM5OTAwNCAuMjM5MTAzLTIuMjk1MzkyQy4yMzkxMDMtMi4yMjM2NjEgLjI5NDg5NC0yLjE5MTc4MSAuMzU4NjU1LTIuMTkxNzgxQy40NjIyNjctMi4xOTE3ODEgLjQ3MDIzNy0yLjIzOTYwMSAuNDk0MTQ3LTIuMzE5MzAzQy43MTczMS0zLjA3NjQ2MyAxLjA4MzkzNS0zLjI5MTY1NiAxLjMyMzAzOS0zLjI5MTY1NkMxLjQzNDYyLTMuMjkxNjU2IDEuNTE0MzIxLTMuMjUxODA2IDEuNTE0MzIxLTMuMDI4NjQzQzEuNTE0MzIxLTIuOTQ4OTQxIDEuNTA2MzUxLTIuODM3MzYgMS40MjY2NS0yLjU5ODI1N0wxLjIxMTQ1Ny0yLjA0ODMxOVonLz4KPHBhdGggaWQ9J2czLTEwNycgZD0nTTIuMzI3MjczLTUuMjkyMTU0QzIuMzM1MjQzLTUuMzA4MDk1IDIuMzU5MTUzLTUuNDExNzA2IDIuMzU5MTUzLTUuNDE5Njc2QzIuMzU5MTUzLTUuNDU5NTI3IDIuMzI3MjczLTUuNTMxMjU4IDIuMjMxNjMxLTUuNTMxMjU4QzIuMTk5NzUxLTUuNTMxMjU4IDEuOTUyNjc3LTUuNTA3MzQ3IDEuNzY5MzY1LTUuNDkxNDA3TDEuMzIzMDM5LTUuNDU5NTI3QzEuMTQ3Njk2LTUuNDQzNTg3IDEuMDY3OTk1LTUuNDM1NjE2IDEuMDY3OTk1LTUuMjkyMTU0QzEuMDY3OTk1LTUuMTgwNTczIDEuMTc5NTc3LTUuMTgwNTczIDEuMjc1MjE4LTUuMTgwNTczQzEuNjU3NzgzLTUuMTgwNTczIDEuNjU3NzgzLTUuMTMyNzUyIDEuNjU3NzgzLTUuMDYxMDIxQzEuNjU3NzgzLTUuMDM3MTExIDEuNjU3NzgzLTUuMDIxMTcxIDEuNjE3OTMzLTQuODc3NzA5TC40ODYxNzctLjM0MjcxNUMuNDU0Mjk2LS4yMjMxNjMgLjQ1NDI5Ni0uMTc1MzQyIC40NTQyOTYtLjE2NzM3MkMuNDU0Mjk2LS4wMzE4OCAuNTY1ODc4IC4wNzk3MDEgLjcxNzMxIC4wNzk3MDFDLjk4ODI5NCAuMDc5NzAxIDEuMDUyMDU1LS4xNzUzNDIgMS4wODM5MzUtLjI4NjkyNEMxLjE2MzYzNi0uNjIxNjY5IDEuMzcwODU5LTEuNDY2NTAxIDEuNDU4NTMxLTEuODAxMjQ1QzEuODk2ODg3LTEuNzUzNDI1IDIuNDMwODg0LTEuNjAxOTkzIDIuNDMwODg0LTEuMTQ3Njk2QzIuNDMwODg0LTEuMTA3ODQ2IDIuNDMwODg0LTEuMDY3OTk1IDIuNDE0OTQ0LS45ODgyOTRDMi4zOTEwMzQtLjg4NDY4MiAyLjM3NTA5My0uNzczMTAxIDIuMzc1MDkzLS43MzMyNUMyLjM3NTA5My0uMjYzMDE0IDIuNzI1Nzc4IC4wNzk3MDEgMy4xODgwNDUgLjA3OTcwMUMzLjUyMjc5IC4wNzk3MDEgMy43MzAwMTItLjE2NzM3MiAzLjgzMzYyNC0uMzE4ODA0QzQuMDI0OTA3LS42MTM2OTkgNC4xNTI0MjgtMS4wOTE5MDUgNC4xNTI0MjgtMS4xMzk3MjZDNC4xNTI0MjgtMS4yMTk0MjcgNC4wODg2NjctMS4yNDMzMzcgNC4wMzI4NzctMS4yNDMzMzdDMy45MzcyMzUtMS4yNDMzMzcgMy45MjEyOTUtMS4xOTU1MTcgMy44ODk0MTUtMS4wNTIwNTVDMy43ODU4MDMtLjY3NzQ2IDMuNTc4NTgtLjE0MzQ2MiAzLjIwMzk4NS0uMTQzNDYyQzIuOTk2NzYyLS4xNDM0NjIgMi45NDg5NDEtLjMxODgwNCAyLjk0ODk0MS0uNTMzOTk4QzIuOTQ4OTQxLS42Mzc2MDkgMi45NTY5MTItLjczMzI1IDIuOTk2NzYyLS45MTY1NjNDMy4wMDQ3MzItLjk0ODQ0MyAzLjAzNjYxMy0xLjA3NTk2NSAzLjAzNjYxMy0xLjE2MzYzNkMzLjAzNjYxMy0xLjgxNzE4NiAyLjIxNTY5MS0xLjk2MDY0OCAxLjgwOTIxNS0yLjAxNjQzOEMyLjEwNDExLTIuMTkxNzgxIDIuMzc1MDkzLTIuNDYyNzY1IDIuNDcwNzM1LTIuNTY2Mzc2QzIuOTA5MDkxLTIuOTk2NzYyIDMuMjY3NzQ2LTMuMjkxNjU2IDMuNjUwMzExLTMuMjkxNjU2QzMuNzUzOTIzLTMuMjkxNjU2IDMuODQ5NTY0LTMuMjY3NzQ2IDMuOTEzMzI1LTMuMTg4MDQ1QzMuNDgyOTM5LTMuMTMyMjU0IDMuNDgyOTM5LTIuNzU3NjU5IDMuNDgyOTM5LTIuNzQ5Njg5QzMuNDgyOTM5LTIuNTc0MzQ2IDMuNjE4NDMxLTIuNDU0Nzk1IDMuNzkzNzczLTIuNDU0Nzk1QzQuMDA4OTY2LTIuNDU0Nzk1IDQuMjQ4MDctMi42MzAxMzcgNC4yNDgwNy0yLjk1NjkxMkM0LjI0ODA3LTMuMjI3ODk1IDQuMDU2Nzg3LTMuNTE0ODE5IDMuNjU4MjgxLTMuNTE0ODE5QzMuMTk2MDE1LTMuNTE0ODE5IDIuNzgxNTY5LTMuMTY0MTM0IDIuMzI3MjczLTIuNzA5ODM4QzEuODY1MDA2LTIuMjU1NTQyIDEuNjY1NzUzLTIuMTY3ODcgMS41MzgyMzItMi4xMTIwOEwyLjMyNzI3My01LjI5MjE1NFonLz4KPHBhdGggaWQ9J2cyLTAnIGQ9J003Ljg3ODQ1Ni0yLjc0OTY4OUM4LjA4MTY5NC0yLjc0OTY4OSA4LjI5Njg4Ny0yLjc0OTY4OSA4LjI5Njg4Ny0yLjk4ODc5MlM4LjA4MTY5NC0zLjIyNzg5NSA3Ljg3ODQ1Ni0zLjIyNzg5NUgxLjQxMDcxQzEuMjA3NDcyLTMuMjI3ODk1IC45OTIyNzktMy4yMjc4OTUgLjk5MjI3OS0yLjk4ODc5MlMxLjIwNzQ3Mi0yLjc0OTY4OSAxLjQxMDcxLTIuNzQ5Njg5SDcuODc4NDU2WicvPgo8cGF0aCBpZD0nZzYtNDAnIGQ9J00zLjg4NTQzIDIuOTA1MTA2QzMuODg1NDMgMi44NjkyNCAzLjg4NTQzIDIuODQ1MzMgMy42ODIxOTIgMi42NDIwOTJDMi40ODY2NzUgMS40MzQ2MiAxLjgxNzE4Ni0uNTM3OTgzIDEuODE3MTg2LTIuOTc2ODM3QzEuODE3MTg2LTUuMjk2MTM5IDIuMzc5MDc4LTcuMjkyNjUzIDMuNzY1ODc4LTguNzAzMzYyQzMuODg1NDMtOC44MTA5NTkgMy44ODU0My04LjgzNDg2OSAzLjg4NTQzLTguODcwNzM1QzMuODg1NDMtOC45NDI0NjYgMy44MjU2NTQtOC45NjYzNzYgMy43Nzc4MzMtOC45NjYzNzZDMy42MjI0MTYtOC45NjYzNzYgMi42NDIwOTItOC4xMDU2MDQgMi4wNTYyODktNi45MzM5OThDMS40NDY1NzUtNS43MjY1MjYgMS4xNzE2MDYtNC40NDczMjMgMS4xNzE2MDYtMi45NzY4MzdDMS4xNzE2MDYtMS45MTI4MjcgMS4zMzg5NzktLjQ5MDE2MiAxLjk2MDY0OCAuNzg5MDQxQzIuNjY2MDAyIDIuMjIzNjYxIDMuNjQ2MzI2IDMuMDAwNzQ3IDMuNzc3ODMzIDMuMDAwNzQ3QzMuODI1NjU0IDMuMDAwNzQ3IDMuODg1NDMgMi45NzY4MzcgMy44ODU0MyAyLjkwNTEwNlonLz4KPHBhdGggaWQ9J2c2LTQxJyBkPSdNMy4zNzEzNTctMi45NzY4MzdDMy4zNzEzNTctMy44ODU0MyAzLjI1MTgwNi01LjM2Nzg3IDIuNTgyMzE2LTYuNzU0NjdDMS44NzY5NjEtOC4xODkyOSAuODk2NjM4LTguOTY2Mzc2IC43NjUxMzEtOC45NjYzNzZDLjcxNzMxLTguOTY2Mzc2IC42NTc1MzQtOC45NDI0NjYgLjY1NzUzNC04Ljg3MDczNUMuNjU3NTM0LTguODM0ODY5IC42NTc1MzQtOC44MTA5NTkgLjg2MDc3Mi04LjYwNzcyMUMyLjA1NjI4OS03LjQwMDI0OSAyLjcyNTc3OC01LjQyNzY0NiAyLjcyNTc3OC0yLjk4ODc5MkMyLjcyNTc3OC0uNjY5NDg5IDIuMTYzODg1IDEuMzI3MDI0IC43NzcwODYgMi43Mzc3MzNDLjY1NzUzNCAyLjg0NTMzIC42NTc1MzQgMi44NjkyNCAuNjU3NTM0IDIuOTA1MTA2Qy42NTc1MzQgMi45NzY4MzcgLjcxNzMxIDMuMDAwNzQ3IC43NjUxMzEgMy4wMDA3NDdDLjkyMDU0OCAzLjAwMDc0NyAxLjkwMDg3MiAyLjEzOTk3NSAyLjQ4NjY3NSAuOTY4MzY5QzMuMDk2Mzg5LS4yNTEwNTkgMy4zNzEzNTctMS41NDIyMTcgMy4zNzEzNTctMi45NzY4MzdaJy8+CjxwYXRoIGlkPSdnNi00MycgZD0nTTQuNzcwMTEyLTIuNzYxNjQ0SDguMDY5NzM4QzguMjM3MTExLTIuNzYxNjQ0IDguNDUyMzA0LTIuNzYxNjQ0IDguNDUyMzA0LTIuOTc2ODM3QzguNDUyMzA0LTMuMjAzOTg1IDguMjQ5MDY2LTMuMjAzOTg1IDguMDY5NzM4LTMuMjAzOTg1SDQuNzcwMTEyVi02LjUwMzYxMUM0Ljc3MDExMi02LjY3MDk4NCA0Ljc3MDExMi02Ljg4NjE3NyA0LjU1NDkxOS02Ljg4NjE3N0M0LjMyNzc3MS02Ljg4NjE3NyA0LjMyNzc3MS02LjY4MjkzOSA0LjMyNzc3MS02LjUwMzYxMVYtMy4yMDM5ODVIMS4wMjgxNDRDLjg2MDc3Mi0zLjIwMzk4NSAuNjQ1NTc5LTMuMjAzOTg1IC42NDU1NzktMi45ODg3OTJDLjY0NTU3OS0yLjc2MTY0NCAuODQ4ODE3LTIuNzYxNjQ0IDEuMDI4MTQ0LTIuNzYxNjQ0SDQuMzI3NzcxVi41Mzc5ODNDNC4zMjc3NzEgLjcwNTM1NSA0LjMyNzc3MSAuOTIwNTQ4IDQuNTQyOTY0IC45MjA1NDhDNC43NzAxMTIgLjkyMDU0OCA0Ljc3MDExMiAuNzE3MzEgNC43NzAxMTIgLjUzNzk4M1YtMi43NjE2NDRaJy8+CjxwYXRoIGlkPSdnNi00OScgZD0nTTMuNDQzMDg4LTcuNjYzMjYzQzMuNDQzMDg4LTcuOTM4MjMyIDMuNDQzMDg4LTcuOTUwMTg3IDMuMjAzOTg1LTcuOTUwMTg3QzIuOTE3MDYxLTcuNjI3Mzk3IDIuMzE5MzAzLTcuMTg1MDU2IDEuMDg3OTItNy4xODUwNTZWLTYuODM4MzU2QzEuMzYyODg5LTYuODM4MzU2IDEuOTYwNjQ4LTYuODM4MzU2IDIuNjE4MTgyLTcuMTQ5MTkxVi0uOTIwNTQ4QzIuNjE4MTgyLS40OTAxNjIgMi41ODIzMTYtLjM0NjcgMS41MzAyNjItLjM0NjdIMS4xNTk2NTFWMEMxLjQ4MjQ0MS0uMDIzOTEgMi42NDIwOTItLjAyMzkxIDMuMDM2NjEzLS4wMjM5MVM0LjU3ODgyOS0uMDIzOTEgNC45MDE2MTkgMFYtLjM0NjdINC41MzEwMDlDMy40Nzg5NTQtLjM0NjcgMy40NDMwODgtLjQ5MDE2MiAzLjQ0MzA4OC0uOTIwNTQ4Vi03LjY2MzI2M1onLz4KPHBhdGggaWQ9J2c2LTYxJyBkPSdNOC4wNjk3MzgtMy44NzM0NzRDOC4yMzcxMTEtMy44NzM0NzQgOC40NTIzMDQtMy44NzM0NzQgOC40NTIzMDQtNC4wODg2NjdDOC40NTIzMDQtNC4zMTU4MTYgOC4yNDkwNjYtNC4zMTU4MTYgOC4wNjk3MzgtNC4zMTU4MTZIMS4wMjgxNDRDLjg2MDc3Mi00LjMxNTgxNiAuNjQ1NTc5LTQuMzE1ODE2IC42NDU1NzktNC4xMDA2MjNDLjY0NTU3OS0zLjg3MzQ3NCAuODQ4ODE3LTMuODczNDc0IDEuMDI4MTQ0LTMuODczNDc0SDguMDY5NzM4Wk04LjA2OTczOC0xLjY0OTgxM0M4LjIzNzExMS0xLjY0OTgxMyA4LjQ1MjMwNC0xLjY0OTgxMyA4LjQ1MjMwNC0xLjg2NTAwNkM4LjQ1MjMwNC0yLjA5MjE1NCA4LjI0OTA2Ni0yLjA5MjE1NCA4LjA2OTczOC0yLjA5MjE1NEgxLjAyODE0NEMuODYwNzcyLTIuMDkyMTU0IC42NDU1NzktMi4wOTIxNTQgLjY0NTU3OS0xLjg3Njk2MUMuNjQ1NTc5LTEuNjQ5ODEzIC44NDg4MTctMS42NDk4MTMgMS4wMjgxNDQtMS42NDk4MTNIOC4wNjk3MzhaJy8+CjxwYXRoIGlkPSdnNi05MScgZD0nTTIuOTg4NzkyIDIuOTg4NzkyVjIuNTQ2NDUxSDEuODI5MTQxVi04LjUyNDAzNUgyLjk4ODc5MlYtOC45NjYzNzZIMS4zODY4VjIuOTg4NzkySDIuOTg4NzkyWicvPgo8cGF0aCBpZD0nZzYtOTMnIGQ9J00xLjg1MzA1MS04Ljk2NjM3NkguMjUxMDU5Vi04LjUyNDAzNUgxLjQxMDcxVjIuNTQ2NDUxSC4yNTEwNTlWMi45ODg3OTJIMS44NTMwNTFWLTguOTY2Mzc2WicvPgo8cGF0aCBpZD0nZzYtOTQnIGQ9J00yLjkyOTAxNi04LjI5Njg4N0wxLjM2Mjg4OS02LjY3MDk4NEwxLjU1NDE3Mi02LjQ5MTY1NkwyLjkxNzA2MS03LjcyMzAzOUw0LjI5MTkwNS02LjQ5MTY1Nkw0LjQ4MzE4OC02LjY3MDk4NEwyLjkyOTAxNi04LjI5Njg4N1onLz4KPHBhdGggaWQ9J2c2LTEwMycgZD0nTTEuNDIyNjY1LTIuMTYzODg1QzEuOTg0NTU4LTEuNzkzMjc1IDIuNDYyNzY1LTEuNzkzMjc1IDIuNTk0MjcxLTEuNzkzMjc1QzMuNjcwMjM3LTEuNzkzMjc1IDQuNDcxMjMzLTIuNjA2MjI3IDQuNDcxMjMzLTMuNTI2Nzc1QzQuNDcxMjMzLTMuODQ5NTY0IDQuMzc1NTkyLTQuMzAzODYxIDMuOTkzMDI2LTQuNjg2NDI2QzQuNDU5Mjc4LTUuMTY0NjMzIDUuMDIxMTcxLTUuMTY0NjMzIDUuMDgwOTQ2LTUuMTY0NjMzQzUuMTI4NzY3LTUuMTY0NjMzIDUuMTg4NTQzLTUuMTY0NjMzIDUuMjM2MzY0LTUuMTQwNzIyQzUuMTE2ODEyLTUuMDkyOTAyIDUuMDU3MDM2LTQuOTczMzUgNS4wNTcwMzYtNC44NDE4NDNDNS4wNTcwMzYtNC42NzQ0NzEgNS4xNzY1ODgtNC41MzEwMDkgNS4zNjc4Ny00LjUzMTAwOUM1LjQ2MzUxMi00LjUzMTAwOSA1LjY3ODcwNS00LjU5MDc4NSA1LjY3ODcwNS00Ljg1Mzc5OEM1LjY3ODcwNS01LjA2ODk5MSA1LjUxMTMzMy01LjQwMzczNiA1LjA5MjkwMi01LjQwMzczNkM0LjQ3MTIzMy01LjQwMzczNiA0LjAwNDk4MS01LjAyMTE3MSAzLjgzNzYwOS00Ljg0MTg0M0MzLjQ3ODk1NC01LjExNjgxMiAzLjA2MDUyMy01LjI3MjIyOSAyLjYwNjIyNy01LjI3MjIyOUMxLjUzMDI2Mi01LjI3MjIyOSAuNzI5MjY1LTQuNDU5Mjc4IC43MjkyNjUtMy41Mzg3M0MuNzI5MjY1LTIuODU3Mjg1IDEuMTQ3Njk2LTIuNDE0OTQ0IDEuMjY3MjQ4LTIuMzA3MzQ3QzEuMTIzNzg2LTIuMTI4MDIgLjkwODU5My0xLjc4MTMyIC45MDg1OTMtMS4zMTUwNjhDLjkwODU5My0uNjIxNjY5IDEuMzI3MDI0LS4zMjI3OSAxLjQyMjY2NS0uMjYzMDE0Qy44NzI3MjctLjEwNzU5NyAuMzIyNzkgLjMyMjc5IC4zMjI3OSAuOTQ0NDU4Qy4zMjI3OSAxLjc2OTM2NSAxLjQ0NjU3NSAyLjQ1MDgwOSAyLjkxNzA2MSAyLjQ1MDgwOUM0LjMzOTcyNiAyLjQ1MDgwOSA1LjUyMzI4OCAxLjgxNzE4NiA1LjUyMzI4OCAuOTIwNTQ4QzUuNTIzMjg4IC42MjE2NjkgNS40Mzk2MDEtLjA4MzY4NiA0LjcyMjI5MS0uNDU0Mjk2QzQuMTEyNTc4LS43NjUxMzEgMy41MTQ4MTktLjc2NTEzMSAyLjQ4NjY3NS0uNzY1MTMxQzEuNzU3NDEtLjc2NTEzMSAxLjY3MzcyNC0uNzY1MTMxIDEuNDU4NTMxLS45OTIyNzlDMS4zMzg5NzktMS4xMTE4MzEgMS4yMzEzODItMS4zMzg5NzkgMS4yMzEzODItMS41OTAwMzdDMS4yMzEzODItMS43OTMyNzUgMS4zMDMxMTMtMS45OTY1MTMgMS40MjI2NjUtMi4xNjM4ODVaTTIuNjA2MjI3LTIuMDQ0MzM0QzEuNTU0MTcyLTIuMDQ0MzM0IDEuNTU0MTcyLTMuMjUxODA2IDEuNTU0MTcyLTMuNTI2Nzc1QzEuNTU0MTcyLTMuNzQxOTY4IDEuNTU0MTcyLTQuMjMyMTMgMS43NTc0MS00LjU1NDkxOUMxLjk4NDU1OC00LjkwMTYxOSAyLjM0MzIxMy01LjAyMTE3MSAyLjU5NDI3MS01LjAyMTE3MUMzLjY0NjMyNi01LjAyMTE3MSAzLjY0NjMyNi0zLjgxMzY5OSAzLjY0NjMyNi0zLjUzODczQzMuNjQ2MzI2LTMuMzIzNTM3IDMuNjQ2MzI2LTIuODMzMzc1IDMuNDQzMDg4LTIuNTEwNTg1QzMuMjE1OTQtMi4xNjM4ODUgMi44NTcyODUtMi4wNDQzMzQgMi42MDYyMjctMi4wNDQzMzRaTTIuOTI5MDE2IDIuMTk5NzUxQzEuNzgxMzIgMi4xOTk3NTEgLjkwODU5MyAxLjYxMzk0OCAuOTA4NTkzIC45MzI1MDNDLjkwODU5MyAuODM2ODYyIC45MzI1MDMgLjM3MDYxIDEuMzg2OCAuMDU5Nzc2QzEuNjQ5ODEzLS4xMDc1OTcgMS43NTc0MS0uMTA3NTk3IDIuNTk0MjcxLS4xMDc1OTdDMy41ODY1NS0uMTA3NTk3IDQuOTM3NDg0LS4xMDc1OTcgNC45Mzc0ODQgLjkzMjUwM0M0LjkzNzQ4NCAxLjYzNzg1OCA0LjAyODg5MiAyLjE5OTc1MSAyLjkyOTAxNiAyLjE5OTc1MVonLz4KPHBhdGggaWQ9J2c2LTEwOCcgZD0nTTIuMDU2Mjg5LTguMjk2ODg3TC4zOTQ1MjEtOC4xNjUzOFYtNy44MTg2OEMxLjIwNzQ3Mi03LjgxODY4IDEuMzAzMTEzLTcuNzM0OTk0IDEuMzAzMTEzLTcuMTQ5MTkxVi0uODg0NjgyQzEuMzAzMTEzLS4zNDY3IDEuMTcxNjA2LS4zNDY3IC4zOTQ1MjEtLjM0NjdWMEMuNzI5MjY1LS4wMjM5MSAxLjMxNTA2OC0uMDIzOTEgMS42NzM3MjQtLjAyMzkxUzIuNjMwMTM3LS4wMjM5MSAyLjk2NDg4MiAwVi0uMzQ2N0MyLjE5OTc1MS0uMzQ2NyAyLjA1NjI4OS0uMzQ2NyAyLjA1NjI4OS0uODg0NjgyVi04LjI5Njg4N1onLz4KPHBhdGggaWQ9J2c2LTExMScgZD0nTTUuNDg3NDIyLTIuNTU4NDA2QzUuNDg3NDIyLTQuMTAwNjIzIDQuMzE1ODE2LTUuMzMyMDA1IDIuOTI5MDE2LTUuMzMyMDA1QzEuNDk0Mzk2LTUuMzMyMDA1IC4zNTg2NTUtNC4wNjQ3NTcgLjM1ODY1NS0yLjU1ODQwNkMuMzU4NjU1LTEuMDI4MTQ0IDEuNTU0MTcyIC4xMTk1NTIgMi45MTcwNjEgLjExOTU1MkM0LjMyNzc3MSAuMTE5NTUyIDUuNDg3NDIyLTEuMDUyMDU1IDUuNDg3NDIyLTIuNTU4NDA2Wk0yLjkyOTAxNi0uMTQzNDYyQzIuNDg2Njc1LS4xNDM0NjIgMS45NDg2OTItLjMzNDc0NSAxLjYwMTk5My0uOTIwNTQ4QzEuMjc5MjAzLTEuNDU4NTMxIDEuMjY3MjQ4LTIuMTYzODg1IDEuMjY3MjQ4LTIuNjY2MDAyQzEuMjY3MjQ4LTMuMTIwMjk5IDEuMjY3MjQ4LTMuODQ5NTY0IDEuNjM3ODU4LTQuMzg3NTQ3QzEuOTcyNjAzLTQuOTAxNjE5IDIuNDk4NjMtNS4wOTI5MDIgMi45MTcwNjEtNS4wOTI5MDJDMy4zODMzMTMtNS4wOTI5MDIgMy44ODU0My00Ljg3NzcwOSA0LjIwODIxOS00LjQxMTQ1N0M0LjU3ODgyOS0zLjg2MTUxOSA0LjU3ODgyOS0zLjEwODM0NCA0LjU3ODgyOS0yLjY2NjAwMkM0LjU3ODgyOS0yLjI0NzU3MiA0LjU3ODgyOS0xLjUwNjM1MSA0LjI2Nzk5NS0uOTQ0NDU4QzMuOTMzMjUtLjM3MDYxIDMuMzgzMzEzLS4xNDM0NjIgMi45MjkwMTYtLjE0MzQ2MlonLz4KPHBhdGggaWQ9J2cxLTAnIGQ9J001LjU3MTEwOC0xLjgwOTIxNUM1LjY5ODYzLTEuODA5MjE1IDUuODczOTczLTEuODA5MjE1IDUuODczOTczLTEuOTkyNTI4UzUuNjk4NjMtMi4xNzU4NDEgNS41NzExMDgtMi4xNzU4NDFIMS4wMDQyMzRDLjg3NjcxMi0yLjE3NTg0MSAuNzAxMzctMi4xNzU4NDEgLjcwMTM3LTEuOTkyNTI4Uy44NzY3MTItMS44MDkyMTUgMS4wMDQyMzQtMS44MDkyMTVINS41NzExMDhaJy8+CjxwYXRoIGlkPSdnNC0xMicgZD0nTTYuNzY2NjI1LTYuOTU3OTA4QzYuNzY2NjI1LTcuNjc1MjE4IDYuMTU2OTEyLTguNDI4Mzk0IDUuMDY4OTkxLTguNDI4Mzk0QzMuNTI2Nzc1LTguNDI4Mzk0IDIuNTQ2NDUxLTYuNTM5NDc3IDIuMjM1NjE2LTUuMjk2MTM5TC4zNDY3IDIuMTk5NzUxQy4zMjI3OSAyLjI5NTM5MiAuMzk0NTIxIDIuMzE5MzAzIC40NTQyOTYgMi4zMTkzMDNDLjUzNzk4MyAyLjMxOTMwMyAuNTk3NzU4IDIuMzA3MzQ3IC42MDk3MTQgMi4yNDc1NzJMMS40NDY1NzUtMS4wOTk4NzVDMS41NjYxMjctLjQzMDM4NiAyLjIyMzY2MSAuMTE5NTUyIDIuOTI5MDE2IC4xMTk1NTJDNC42Mzg2MDUgLjExOTU1MiA2LjI1MjU1My0xLjIxOTQyNyA2LjI1MjU1My0zLjAwMDc0N0M2LjI1MjU1My0zLjQ1NTA0NCA2LjE0NDk1Ni0zLjkwOTM0IDUuODkzODk4LTQuMjkxOTA1QzUuNzUwNDM2LTQuNTE5MDU0IDUuNTcxMTA4LTQuNjg2NDI2IDUuMzc5ODI2LTQuODI5ODg4QzYuMjQwNTk4LTUuMjg0MTg0IDYuNzY2NjI1LTYuMDEzNDUgNi43NjY2MjUtNi45NTc5MDhaTTQuNjg2NDI2LTQuODQxODQzQzQuNDk1MTQzLTQuNzcwMTEyIDQuMzAzODYxLTQuNzQ2MjAyIDQuMDc2NzEyLTQuNzQ2MjAyQzMuOTA5MzQtNC43NDYyMDIgMy43NTM5MjMtNC43MzQyNDcgMy41Mzg3My00LjgwNTk3OEMzLjY1ODI4MS00Ljg4OTY2NCAzLjgzNzYwOS00LjkxMzU3NCA0LjA4ODY2Ny00LjkxMzU3NEM0LjMwMzg2MS00LjkxMzU3NCA0LjUxOTA1NC00Ljg4OTY2NCA0LjY4NjQyNi00Ljg0MTg0M1pNNi4xNDQ5NTYtNy4wNjU1MDRDNi4xNDQ5NTYtNi40MDc5NyA1LjgyMjE2Ny01LjQ1MTU1NyA1LjA0NTA4MS01LjAwOTIxNUM0LjgxNzkzMy01LjA5MjkwMiA0LjUwNzA5OC01LjE1MjY3NyA0LjI0NDA4NS01LjE1MjY3N0MzLjk5MzAyNi01LjE1MjY3NyAzLjI3NTcxNi01LjE3NjU4OCAzLjI3NTcxNi00Ljc5NDAyMkMzLjI3NTcxNi00LjQ3MTIzMyAzLjkzMzI1LTQuNTA3MDk4IDQuMTM2NDg4LTQuNTA3MDk4QzQuNDQ3MzIzLTQuNTA3MDk4IDQuNzIyMjkxLTQuNTc4ODI5IDUuMDA5MjE1LTQuNjYyNTE2QzUuMzkxNzgxLTQuMzUxNjgxIDUuNTU5MTUzLTMuOTQ1MjA1IDUuNTU5MTUzLTMuMzQ3NDQ3QzUuNTU5MTUzLTIuNjU0MDQ3IDUuMzY3ODctMi4wOTIxNTQgNS4xNDA3MjItMS41NzgwODJDNC43NDYyMDItLjY5MzQgMy44MTM2OTktLjExOTU1MiAyLjk4ODc5Mi0uMTE5NTUyQzIuMTE2MDY1LS4xMTk1NTIgMS42NjE3NjgtLjgxMjk1MSAxLjY2MTc2OC0xLjYyNTkwM0MxLjY2MTc2OC0xLjczMzQ5OSAxLjY2MTc2OC0xLjg4ODkxNyAxLjcwOTU4OS0yLjA2ODI0NEwyLjQ4NjY3NS01LjIxMjQ1M0MyLjg4MTE5Ni02Ljc3ODU4IDMuODg1NDMtOC4xODkyOSA1LjA0NTA4MS04LjE4OTI5QzUuOTA1ODUzLTguMTg5MjkgNi4xNDQ5NTYtNy41OTE1MzIgNi4xNDQ5NTYtNy4wNjU1MDRaJy8+CjxwYXRoIGlkPSdnNC0yMScgZD0nTTMuNjk0MTQ3LTcuNDQ4MDdDMy4zOTUyNjgtOC4yOTY4ODcgMi40NTA4MDktOC4yOTY4ODcgMi4yOTUzOTItOC4yOTY4ODdDMi4yMjM2NjEtOC4yOTY4ODcgMi4wOTIxNTQtOC4yOTY4ODcgMi4wOTIxNTQtOC4xNzczMzVDMi4wOTIxNTQtOC4wODE2OTQgMi4xNjM4ODUtOC4wNjk3MzggMi4yMjM2NjEtOC4wNTc3ODNDMi40MDI5ODktOC4wMzM4NzMgMi41NDY0NTEtOC4wMDk5NjMgMi43Mzc3MzMtNy42NjMyNjNDMi44NTcyODUtNy40MzYxMTUgNC4wODg2NjctMy44NjE1MTkgNC4wODg2NjctMy44Mzc2MDlDNC4wODg2NjctMy44MjU2NTQgNC4wNzY3MTItMy44MTM2OTkgMy45ODEwNzEtMy43MTgwNTdMLjg3MjcyNy0uNTczODQ4Qy43MjkyNjUtLjQzMDM4NiAuNjMzNjI0LS4zMzQ3NDUgLjYzMzYyNC0uMTc5MzI4Qy42MzM2MjQtLjAxMTk1NSAuNzc3MDg2IC4xMzE1MDcgLjk2ODM2OSAuMTMxNTA3QzEuMDE2MTg5IC4xMzE1MDcgMS4xNDc2OTYgLjEwNzU5NyAxLjIxOTQyNyAuMDM1ODY2QzEuNDEwNzEtLjE0MzQ2MiAzLjEyMDI5OS0yLjIzNTYxNiA0LjIwODIxOS0zLjUyNjc3NUM0LjUxOTA1NC0yLjU5NDI3MSA0LjkwMTYxOS0xLjQ5NDM5NiA1LjI3MjIyOS0uNDkwMTYyQzUuMzMyMDA1LS4zMTA4MzQgNS4zOTE3ODEtLjE0MzQ2MiA1LjU1OTE1MyAuMDExOTU1QzUuNjc4NzA1IC4xMTk1NTIgNS43MDI2MTUgLjExOTU1MiA2LjAzNzM2IC4xMTk1NTJINi4yNjQ1MDhDNi4zMTIzMjkgLjExOTU1MiA2LjM5NjAxNSAuMTE5NTUyIDYuMzk2MDE1IC4wMjM5MUM2LjM5NjAxNS0uMDIzOTEgNi4zODQwNi0uMDM1ODY2IDYuMzM2MjM5LS4wODM2ODZDNi4yMjg2NDMtLjIxNTE5MyA2LjE0NDk1Ni0uNDMwMzg2IDYuMDk3MTM2LS41NzM4NDhMMy42OTQxNDctNy40NDgwN1onLz4KPHBhdGggaWQ9J2c0LTI3JyBkPSdNNi4wNzMyMjUtNC41MDcwOThDNi4yMjg2NDMtNC41MDcwOTggNi42MjMxNjMtNC41MDcwOTggNi42MjMxNjMtNC44ODk2NjRDNi42MjMxNjMtNS4xNTI2NzcgNi4zOTYwMTUtNS4xNTI2NzcgNi4xODA4MjItNS4xNTI2NzdIMy41Mzg3M0MxLjc0NTQ1NS01LjE1MjY3NyAuNDU0Mjk2LTMuMTU2MTY0IC40NTQyOTYtMS43NDU0NTVDLjQ1NDI5Ni0uNzI5MjY1IDEuMTExODMxIC4xMTk1NTIgMi4xODc3OTYgLjExOTU1MkMzLjU5ODUwNiAuMTE5NTUyIDUuMTQwNzIyLTEuMzk4NzU1IDUuMTQwNzIyLTMuMTkyMDNDNS4xNDA3MjItMy42NTgyODEgNS4wMzMxMjYtNC4xMTI1NzggNC43NDYyMDItNC41MDcwOThINi4wNzMyMjVaTTIuMTk5NzUxLS4xMTk1NTJDMS41OTAwMzctLjExOTU1MiAxLjE0NzY5Ni0uNTg1ODAzIDEuMTQ3Njk2LTEuNDEwNzFDMS4xNDc2OTYtMi4xMjgwMiAxLjU3ODA4Mi00LjUwNzA5OCAzLjMzNTQ5Mi00LjUwNzA5OEMzLjg0OTU2NC00LjUwNzA5OCA0LjQyMzQxMi00LjI1NjA0IDQuNDIzNDEyLTMuMzM1NDkyQzQuNDIzNDEyLTIuOTE3MDYxIDQuMjMyMTMtMS45MTI4MjcgMy44MTM2OTktMS4yMTk0MjdDMy4zODMzMTMtLjUxNDA3MiAyLjczNzczMy0uMTE5NTUyIDIuMTk5NzUxLS4xMTk1NTJaJy8+CjxwYXRoIGlkPSdnNC01OScgZD0nTTIuMzMxMjU4IC4wNDc4MjFDMi4zMzEyNTgtLjY0NTU3OSAyLjEwNDExLTEuMTU5NjUxIDEuNjEzOTQ4LTEuMTU5NjUxQzEuMjMxMzgyLTEuMTU5NjUxIDEuMDQwMS0uODQ4ODE3IDEuMDQwMS0uNTg1ODAzUzEuMjE5NDI3IDAgMS42MjU5MDMgMEMxLjc4MTMyIDAgMS45MTI4MjctLjA0NzgyMSAyLjAyMDQyMy0uMTU1NDE3QzIuMDQ0MzM0LS4xNzkzMjggMi4wNTYyODktLjE3OTMyOCAyLjA2ODI0NC0uMTc5MzI4QzIuMDkyMTU0LS4xNzkzMjggMi4wOTIxNTQtLjAxMTk1NSAyLjA5MjE1NCAuMDQ3ODIxQzIuMDkyMTU0IC40NDIzNDEgMi4wMjA0MjMgMS4yMTk0MjcgMS4zMjcwMjQgMS45OTY1MTNDMS4xOTU1MTcgMi4xMzk5NzUgMS4xOTU1MTcgMi4xNjM4ODUgMS4xOTU1MTcgMi4xODc3OTZDMS4xOTU1MTcgMi4yNDc1NzIgMS4yNTUyOTMgMi4zMDczNDcgMS4zMTUwNjggMi4zMDczNDdDMS40MTA3MSAyLjMwNzM0NyAyLjMzMTI1OCAxLjQyMjY2NSAyLjMzMTI1OCAuMDQ3ODIxWicvPgo8cGF0aCBpZD0nZzQtNjcnIGQ9J004LjkzMDUxMS04LjMwODg0MkM4LjkzMDUxMS04LjQxNjQzOCA4Ljg0NjgyNC04LjQxNjQzOCA4LjgyMjkxNC04LjQxNjQzOFM4Ljc1MTE4My04LjQxNjQzOCA4LjY1NTU0Mi04LjI5Njg4N0w3LjgzMDYzNS03LjI5MjY1M0M3LjQxMjIwNC04LjAwOTk2MyA2Ljc1NDY3LTguNDE2NDM4IDUuODU4MDMyLTguNDE2NDM4QzMuMjc1NzE2LTguNDE2NDM4IC41OTc3NTgtNS43OTgyNTcgLjU5Nzc1OC0yLjk4ODc5MkMuNTk3NzU4LS45OTIyNzkgMS45OTY1MTMgLjI1MTA1OSAzLjc0MTk2OCAuMjUxMDU5QzQuNjk4MzgxIC4yNTEwNTkgNS41MzUyNDMtLjE1NTQxNyA2LjIyODY0My0uNzQxMjJDNy4yNjg3NDItMS42MTM5NDggNy41Nzk1NzctMi43NzM1OTkgNy41Nzk1NzctMi44NjkyNEM3LjU3OTU3Ny0yLjk3NjgzNyA3LjQ4MzkzNS0yLjk3NjgzNyA3LjQ0ODA3LTIuOTc2ODM3QzcuMzQwNDczLTIuOTc2ODM3IDcuMzI4NTE4LTIuOTA1MTA2IDcuMzA0NjA4LTIuODU3Mjg1QzYuNzU0NjctLjk5MjI3OSA1LjE0MDcyMi0uMDk1NjQxIDMuOTQ1MjA1LS4wOTU2NDFDMi42Nzc5NTgtLjA5NTY0MSAxLjU3ODA4Mi0uOTA4NTkzIDEuNTc4MDgyLTIuNjA2MjI3QzEuNTc4MDgyLTIuOTg4NzkyIDEuNjk3NjM0LTUuMDY4OTkxIDMuMDQ4NTY4LTYuNjM1MTE4QzMuNzA2MTAyLTcuNDAwMjQ5IDQuODI5ODg4LTguMDY5NzM4IDUuOTY1NjI5LTguMDY5NzM4QzcuMjgwNjk3LTguMDY5NzM4IDcuODY2NTAxLTYuOTgxODE4IDcuODY2NTAxLTUuNzYyMzkxQzcuODY2NTAxLTUuNDUxNTU3IDcuODMwNjM1LTUuMTg4NTQzIDcuODMwNjM1LTUuMTQwNzIyQzcuODMwNjM1LTUuMDMzMTI2IDcuOTUwMTg3LTUuMDMzMTI2IDcuOTg2MDUyLTUuMDMzMTI2QzguMTE3NTU5LTUuMDMzMTI2IDguMTI5NTE0LTUuMDQ1MDgxIDguMTc3MzM1LTUuMjYwMjc0TDguOTMwNTExLTguMzA4ODQyWicvPgo8cGF0aCBpZD0nZzQtNzYnIGQ9J000LjM4NzU0Ny03LjI0NDgzMkM0LjQ5NTE0My03LjY5OTEyOCA0LjUzMTAwOS03LjgxODY4IDUuNTgzMDY0LTcuODE4NjhDNS45MDU4NTMtNy44MTg2OCA1Ljk4OTUzOS03LjgxODY4IDUuOTg5NTM5LTguMDQ1ODI4QzUuOTg5NTM5LTguMTY1MzggNS44NTgwMzItOC4xNjUzOCA1LjgxMDIxMi04LjE2NTM4QzUuNTcxMTA4LTguMTY1MzggNS4yOTYxMzktOC4xNDE0NjkgNS4wNTcwMzYtOC4xNDE0NjlIMy40NTUwNDRDMy4yMjc4OTUtOC4xNDE0NjkgMi45NjQ4ODItOC4xNjUzOCAyLjczNzczMy04LjE2NTM4QzIuNjQyMDkyLTguMTY1MzggMi41MTA1ODUtOC4xNjUzOCAyLjUxMDU4NS03LjkzODIzMkMyLjUxMDU4NS03LjgxODY4IDIuNjE4MTgyLTcuODE4NjggMi43OTc1MDktNy44MTg2OEMzLjUyNjc3NS03LjgxODY4IDMuNTI2Nzc1LTcuNzIzMDM5IDMuNTI2Nzc1LTcuNTkxNTMyQzMuNTI2Nzc1LTcuNTY3NjIxIDMuNTI2Nzc1LTcuNDk1ODkgMy40Nzg5NTQtNy4zMTY1NjNMMS44NjUwMDYtLjg4NDY4MkMxLjc1NzQxLS40NjYyNTIgMS43MzM0OTktLjM0NjcgLjg5NjYzOC0uMzQ2N0MuNjY5NDg5LS4zNDY3IC41NDk5MzgtLjM0NjcgLjU0OTkzOC0uMTMxNTA3Qy41NDk5MzggMCAuNjIxNjY5IDAgLjg2MDc3MiAwSDYuMjE2Njg3QzYuNDc5NzAxIDAgNi40OTE2NTYtLjAxMTk1NSA2LjU3NTM0Mi0uMjI3MTQ4TDcuNDk1ODktMi43NzM1OTlDNy41MTk4MDEtMi44MzMzNzUgNy41NDM3MTEtMi45MDUxMDYgNy41NDM3MTEtMi45NDA5NzFDNy41NDM3MTEtMy4wMTI3MDIgNy40ODM5MzUtMy4wNjA1MjMgNy40MjQxNTktMy4wNjA1MjNDNy40MTIyMDQtMy4wNjA1MjMgNy4zNTI0MjgtMy4wNjA1MjMgNy4zMjg1MTgtMy4wMTI3MDJDNy4zMDQ2MDgtMy4wMDA3NDcgNy4zMDQ2MDgtMi45NzY4MzcgNy4yMDg5NjYtMi43NDk2ODlDNi44MjY0MDEtMS42OTc2MzQgNi4yODg0MTgtLjM0NjcgNC4yNjc5OTUtLjM0NjdIMy4xMjAyOTlDMi45NTI5MjctLjM0NjcgMi45MjkwMTYtLjM0NjcgMi44NTcyODUtLjM1ODY1NUMyLjcyNTc3OC0uMzcwNjEgMi43MTM4MjMtLjM5NDUyMSAyLjcxMzgyMy0uNDkwMTYyQzIuNzEzODIzLS41NzM4NDggMi43Mzc3MzMtLjY0NTU3OSAyLjc2MTY0NC0uNzUzMTc2TDQuMzg3NTQ3LTcuMjQ0ODMyWicvPgo8cGF0aCBpZD0nZzQtOTYnIGQ9J00xLjA5OTg3NS0yLjAzMjM3OUMuMzQ2Ny0xLjI5MTE1OCAuMTU1NDE3LTEuMTExODMxIC4xNTU0MTctMS4wNjQwMVMuMjAzMjM4LS45MzI1MDMgLjI4NjkyNC0uOTMyNTAzQy4zNDY3LS45MzI1MDMgMS4wMjgxNDQtMS41OTAwMzcgMS4xMjM3ODYtMS42OTc2MzRDMS4xOTU1MTctLjg5NjYzOCAxLjQ5NDM5NiAuMTQzNDYyIDIuNDI2ODk5IC4xNDM0NjJDMi45MDUxMDYgLjE0MzQ2MiAzLjMzNTQ5Mi0uMTU1NDE3IDMuNTI2Nzc1LS4yOTg4NzlDMy42ODIxOTItLjQxODQzMSA0LjI1NjA0LS45MDg1OTMgNC4yNTYwNC0xLjAxNjE4OUM0LjI1NjA0LTEuMDc1OTY1IDQuMTk2MjY0LTEuMTQ3Njk2IDQuMTM2NDg4LTEuMTQ3Njk2QzQuMDg4NjY3LTEuMTQ3Njk2IDMuOTA5MzQtLjk2ODM2OSAzLjg2MTUxOS0uOTIwNTQ4QzMuNDQzMDg4LS41MTQwNzIgMi45MTcwNjEtLjA5NTY0MSAyLjQzODg1NC0uMDk1NjQxQzEuNzkzMjc1LS4wOTU2NDEgMS43MDk1ODktMS4wMjgxNDQgMS43MDk1ODktMS42NzM3MjRDMS43MDk1ODktMS43OTMyNzUgMS43MDk1ODktMi4yOTUzOTIgMS43OTMyNzUtMi4zOTEwMzRDMi40OTg2My0zLjEyMDI5OSA0LjcxMDMzNi01LjQwMzczNiA0LjcxMDMzNi03LjUxOTgwMUM0LjcxMDMzNi03Ljk5ODAwNyA0LjUzMTAwOS04LjQxNjQzOCA0LjAxNjkzNi04LjQxNjQzOEMyLjkwNTEwNi04LjQxNjQzOCAxLjkzNjczNy01Ljk1MzY3NCAxLjc2OTM2NS01LjQ5OTM3N0MxLjcyMTU0NC01LjM3OTgyNiAxLjAyODE0NC0zLjUzODczIDEuMDk5ODc1LTIuMDMyMzc5Wk0xLjgxNzE4Ni0yLjc3MzU5OUMxLjgyOTE0MS0yLjg0NTMzIDIuMzY3MTIzLTUuOTc3NTg0IDMuMzcxMzU3LTcuNjUxMzA4QzMuNTc0NTk1LTcuOTc0MDk3IDMuNzc3ODMzLTguMTc3MzM1IDQuMDE2OTM2LTguMTc3MzM1QzQuNDIzNDEyLTguMTc3MzM1IDQuNDQ3MzIzLTcuNzk0NzcgNC40NDczMjMtNy41MzE3NTZDNC40NDczMjMtNy4xMTMzMjUgNC4zMjc3NzEtNi4wMzczNiAzLjI4NzY3MS00LjUzMTAwOUMyLjk3NjgzNy00LjA4ODY2NyAyLjQ5ODYzLTMuNDkwOTA5IDEuODE3MTg2LTIuNzczNTk5WicvPgo8cGF0aCBpZD0nZzQtMTIwJyBkPSdNNS42NjY3NS00Ljg3NzcwOUM1LjI4NDE4NC00LjgwNTk3OCA1LjE0MDcyMi00LjUxOTA1NCA1LjE0MDcyMi00LjI5MTkwNUM1LjE0MDcyMi00LjAwNDk4MSA1LjM2Nzg3LTMuOTA5MzQgNS41MzUyNDMtMy45MDkzNEM1Ljg5Mzg5OC0zLjkwOTM0IDYuMTQ0OTU2LTQuMjIwMTc0IDYuMTQ0OTU2LTQuNTQyOTY0QzYuMTQ0OTU2LTUuMDQ1MDgxIDUuNTcxMTA4LTUuMjcyMjI5IDUuMDY4OTkxLTUuMjcyMjI5QzQuMzM5NzI2LTUuMjcyMjI5IDMuOTMzMjUtNC41NTQ5MTkgMy44MjU2NTQtNC4zMjc3NzFDMy41NTA2ODUtNS4yMjQ0MDggMi44MDk0NjUtNS4yNzIyMjkgMi41OTQyNzEtNS4yNzIyMjlDMS4zNzQ4NDQtNS4yNzIyMjkgLjcyOTI2NS0zLjcwNjEwMiAuNzI5MjY1LTMuNDQzMDg4Qy43MjkyNjUtMy4zOTUyNjggLjc3NzA4Ni0zLjMzNTQ5MiAuODYwNzcyLTMuMzM1NDkyQy45NTY0MTMtMy4zMzU0OTIgLjk4MDMyNC0zLjQwNzIyMyAxLjAwNDIzNC0zLjQ1NTA0NEMxLjQxMDcxLTQuNzgyMDY3IDIuMjExNzA2LTUuMDMzMTI2IDIuNTU4NDA2LTUuMDMzMTI2QzMuMDk2Mzg5LTUuMDMzMTI2IDMuMjAzOTg1LTQuNTMxMDA5IDMuMjAzOTg1LTQuMjQ0MDg1QzMuMjAzOTg1LTMuOTgxMDcxIDMuMTMyMjU0LTMuNzA2MTAyIDIuOTg4NzkyLTMuMTMyMjU0TDIuNTgyMzE2LTEuNDk0Mzk2QzIuNDAyOTg5LS43NzcwODYgMi4wNTYyODktLjExOTU1MiAxLjQyMjY2NS0uMTE5NTUyQzEuMzYyODg5LS4xMTk1NTIgMS4wNjQwMS0uMTE5NTUyIC44MTI5NTEtLjI3NDk2OUMxLjI0MzMzNy0uMzU4NjU1IDEuMzM4OTc5LS43MTczMSAxLjMzODk3OS0uODYwNzcyQzEuMzM4OTc5LTEuMDk5ODc1IDEuMTU5NjUxLTEuMjQzMzM3IC45MzI1MDMtMS4yNDMzMzdDLjY0NTU3OS0xLjI0MzMzNyAuMzM0NzQ1LS45OTIyNzkgLjMzNDc0NS0uNjA5NzE0Qy4zMzQ3NDUtLjEwNzU5NyAuODk2NjM4IC4xMTk1NTIgMS40MTA3MSAuMTE5NTUyQzEuOTg0NTU4IC4xMTk1NTIgMi4zOTEwMzQtLjMzNDc0NSAyLjY0MjA5Mi0uODI0OTA3QzIuODMzMzc1LS4xMTk1NTIgMy40MzExMzMgLjExOTU1MiAzLjg3MzQ3NCAuMTE5NTUyQzUuMDkyOTAyIC4xMTk1NTIgNS43Mzg0ODEtMS40NDY1NzUgNS43Mzg0ODEtMS43MDk1ODlDNS43Mzg0ODEtMS43NjkzNjUgNS42OTA2Ni0xLjgxNzE4NiA1LjYxODkyOS0xLjgxNzE4NkM1LjUxMTMzMy0xLjgxNzE4NiA1LjQ5OTM3Ny0xLjc1NzQxIDUuNDYzNTEyLTEuNjYxNzY4QzUuMTQwNzIyLS42MDk3MTQgNC40NDczMjMtLjExOTU1MiAzLjkwOTM0LS4xMTk1NTJDMy40OTA5MDktLjExOTU1MiAzLjI2Mzc2MS0uNDMwMzg2IDMuMjYzNzYxLS45MjA1NDhDMy4yNjM3NjEtMS4xODM1NjIgMy4zMTE1ODItMS4zNzQ4NDQgMy41MDI4NjQtMi4xNjM4ODVMMy45MjEyOTUtMy43ODk3ODhDNC4xMDA2MjMtNC41MDcwOTggNC41MDcwOTgtNS4wMzMxMjYgNS4wNTcwMzYtNS4wMzMxMjZDNS4wODA5NDYtNS4wMzMxMjYgNS40MTU2OTEtNS4wMzMxMjYgNS42NjY3NS00Ljg3NzcwOVonLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzQuOTgxMzM1JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC05NicvPgo8dXNlIHg9JzkuODkzNDQyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzE0LjQ0NTc2NycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMjEnLz4KPHVzZSB4PScyMS4yNzQyNTYnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMjkuMTQ3NDExJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi02MScvPgo8dXNlIHg9JzQxLjU3Mjg5MicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTA4Jy8+Cjx1c2UgeD0nNDQuODI0NTUzJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMTEnLz4KPHVzZSB4PSc1MC42Nzc1NDMnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwMycvPgo8dXNlIHg9JzU4LjY4NTYxNCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtNzYnLz4KPHVzZSB4PSc2Ni42NTAxMjEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nNzIuODg3MDkzJyB5PSctNy4zMzkxNjInIHhsaW5rOmhyZWY9JyNnNi05NCcvPgo8dXNlIHg9JzcxLjIwMjQ0NycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtMTInLz4KPHVzZSB4PSc3OC40NzM3MTcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nODMuMDI2MDQzJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9Jzg5Ljg1NDUzMicgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PSc5NC40MDY4NTgnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTU5Jy8+Cjx1c2UgeD0nMTAwLjI2NTczMScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtOTQnLz4KPHVzZSB4PSc5OS42NTEwMTYnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTI3Jy8+Cjx1c2UgeD0nMTA2LjczMzQyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzExMS4yODU3NDYnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTIxJy8+Cjx1c2UgeD0nMTE4LjExNDIzNScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PScxMjIuNjY2NTYxJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC01OScvPgo8dXNlIHg9JzEyNy45MTA3MTknIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTIxJy8+Cjx1c2UgeD0nMTM0LjczOTIwOCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PScxNDkuMjU0MTg1JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi02MScvPgo8dXNlIHg9JzE2OC4zMjE0OTInIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTY3Jy8+Cjx1c2UgeD0nMTgwLjIxMTc2OCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzItMCcvPgo8dXNlIHg9JzE5My4zNjI0NDInIHk9Jy04Ljg5MTQ3NycgeGxpbms6aHJlZj0nI2czLTc4Jy8+CjxyZWN0IHg9JzE5My4zNjI0NDInIHk9Jy03LjQxMjIzNycgaGVpZ2h0PScuNDc4MTg3JyB3aWR0aD0nNy41NzAzMDUnLz4KPHVzZSB4PScxOTUuMDMwNTAzJyB5PSctLjA2MTcxOScgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMjA0LjEyMDc1OScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtMTA4Jy8+Cjx1c2UgeD0nMjA3LjM3MjQyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMTEnLz4KPHVzZSB4PScyMTMuMjI1NDEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTEwMycvPgo8dXNlIHg9JzIyMS4yMzM0ODEnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTkxJy8+Cjx1c2UgeD0nMjI1LjA5OTg1NycgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtOTQnLz4KPHVzZSB4PScyMjQuNDg1MTQyJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yNycvPgo8dXNlIHg9JzIzMS41Njc1NDYnIHk9Jy04LjUyMjc4OCcgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMjM2LjI5OTg2MScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScyNDAuODUyMTg3JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNC0yMScvPgo8dXNlIHg9JzI0Ny42ODA2NzUnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMjUyLjIzMzAwMScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtOTMnLz4KPHVzZSB4PScyNjEuNDYyMTU1JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MycvPgo8dXNlIHg9JzI3Ni41NDQzJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzI4MS4wOTY2MjUnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTIxJy8+Cjx1c2UgeD0nMjkwLjU4MTc3OCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzItMCcvPgo8dXNlIHg9JzMwMi41MzY5MzgnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+Cjx1c2UgeD0nMzA4LjM4OTkyOCcgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PSczMTQuOTM0NzQ0JyB5PSctMTMuMTUwODA0JyB4bGluazpocmVmPScjZzAtODAnLz4KPHVzZSB4PSczMjcuNTU0MTI0JyB5PSctOS45OTU5NjInIHhsaW5rOmhyZWY9JyNnMy03OCcvPgo8dXNlIHg9JzMzNS4xMjQ0MjknIHk9Jy05Ljk5NTk2MicgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PSczNDEuNzEwOTM2JyB5PSctOS45OTU5NjInIHhsaW5rOmhyZWY9JyNnNS00OScvPgo8dXNlIHg9JzMyNy41NTQxMjQnIHk9Jy0uNjk3MzUxJyB4bGluazpocmVmPScjZzMtMTA3Jy8+Cjx1c2UgeD0nMzMyLjE3NTczOScgeT0nLS42OTczNTEnIHhsaW5rOmhyZWY9JyNnNS02MScvPgo8dXNlIHg9JzMzOC43NjIyNDYnIHk9Jy0uNjk3MzUxJyB4bGluazpocmVmPScjZzUtNDgnLz4KPHVzZSB4PSczNDguNDM1NzQ4JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMDgnLz4KPHVzZSB4PSczNTEuNjg3NDA5JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMTEnLz4KPHVzZSB4PSczNTcuNTQwMzk5JyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi0xMDMnLz4KPHVzZSB4PSczNjMuNTU1OTczJyB5PSctNC4xODQzNTEnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzM2OC4xMDgyOTknIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c0LTEyMCcvPgo8dXNlIHg9JzM3NC43NjAzODYnIHk9Jy0yLjM5MTA4OCcgeGxpbms6aHJlZj0nI2czLTEwNScvPgo8dXNlIHg9JzM3OC4xNDE2NTcnIHk9Jy00LjE4NDM1MScgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMzg0LjY4NjQ4MScgeT0nLTQuMTg0MzUxJyB4bGluazpocmVmPScjZzQtNTknLz4KPC9nPgo8L3N2Zz4KPCEtLSBERVBUSD0wIC0tPg==)
The parameter
 is the one maximizing
is the one maximizing  .
.In the case of surrogate model estimate, we note
the input sample of ,  the input sample of
the input sample of  .
We suppose the general linear model link
.
We suppose the general linear model link  with
with  :
:
 is a functional basis with
is a functional basis with  for all i,
for all i,  are the coefficients of the linear combination and
are the coefficients of the linear combination and  is a zero-mean gaussian process with a stationary covariance function
is a zero-mean gaussian process with a stationary covariance function  Thus implies that
Thus implies that  .
.The likelihood function to be maximized writes as follows:

where
 is the matrix resulted from the discretization of the covariance model over .
The parameter is the one maximizing
is the matrix resulted from the discretization of the covariance model over .
The parameter is the one maximizing  .
.Examples
Estimate the Box Cox transformation from a sample:
>>> import openturns as ot >>> sample = ot.Exponential(2).getSample(10) >>> factory = ot.BoxCoxFactory() >>> transform = factory.build(sample) >>> estimatedLambda = transform.getLambda()
Estimate the Box Cox transformation from a field:
>>> indices = [10, 5] >>> mesher = ot.IntervalMesher(indices) >>> interval = ot.Interval([0.0, 0.0], [2.0, 1.0]) >>> mesh = mesher.build(interval) >>> amplitude = [1.0] >>> scale = [0.2, 0.2] >>> covModel = ot.ExponentialModel(scale, amplitude) >>> Xproc = ot.GaussianProcess(covModel, mesh) >>> g = ot.SymbolicFunction(['x1'], ['exp(x1)']) >>> dynTransform = ot.ValueFunction(g, mesh) >>> XtProcess = ot.CompositeProcess(dynTransform, Xproc)
>>> field = XtProcess.getRealization() >>> transform = ot.BoxCoxFactory().build(field)
- buildWithGLM(*args)¶
Estimate the Box Cox transformation with general linear model.
Refer to
build()for details.- Parameters:
- inputSample, outputSample
Sampleor 2d-array The input and output samples of a model evaluated apart.
- covarianceModel
CovarianceModel Covariance model. Should have input dimension equal to input sample’s dimension and dimension equal to output sample’s dimension. See note for some particular applications.
- basis
Basis, optional Functional basis to estimate the trend:
 .
If
.
If  , the same basis is used for each marginal output.
, the same basis is used for each marginal output.- shift
Point It ensures that when shifted, the data are all positive. By default the opposite of the min vector of the data is used if some data are negative.
- inputSample, outputSample
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- generalLinearModelResult
GeneralLinearModelResult The structure that contains results of general linear model algorithm.
- transform
Examples
Estimation of a general linear model:
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> inputSample = ot.Uniform(-1.0, 1.0).getSample(20) >>> outputSample = ot.Sample(inputSample) >>> # Evaluation of y = ax + b (a: scale, b: translate) >>> outputSample = outputSample * [3] + [3.1] >>> # inverse transfo + small noise >>> def f(x): import math; return [math.exp(x[0])] >>> inv_transfo = ot.PythonFunction(1, 1, f) >>> outputSample = inv_transfo(outputSample) + ot.Normal(0, 1.0e-2).getSample(20) >>> # Estimation >>> basis = ot.LinearBasisFactory(1).build() >>> covarianceModel = ot.DiracCovarianceModel() >>> shift = [1.0e-1] >>> boxCox, result = ot.BoxCoxFactory().buildWithGLM(inputSample, outputSample, covarianceModel, basis, shift)
- buildWithGraph(*args)¶
Estimate the Box Cox transformation with graph output.
- Parameters:
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- graph
Graph The graph plots the evolution of the likelihood with respect to the value of
for each component i.
It enables to graphically detect the optimal values.
- transform
- buildWithLM(*args)¶
Estimate the Box Cox transformation with linear model.
Refer to
build()for details.- Parameters:
- inputSample, outputSample
Sampleor 2d-array The input and output samples of a model evaluated apart.
- covarianceModel
CovarianceModel Covariance model. Should have input dimension equal to input sample’s dimension and dimension equal to output sample’s dimension. See note for some particular applications.
- basis
Basis, optional Functional basis to estimate the trend:
.
If , the same basis is used for each marginal output.- shift
Point It ensures that when shifted, the data are all positive. By default the opposite of the min vector of the data is used if some data are negative.
- inputSample, outputSample
- Returns:
- transform
BoxCoxTransform The estimated Box Cox transformation.
- linearModelResult
LinearModelResult The structure that contains results of linear model algorithm.
- transform
Examples
Estimation of a linear model:
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> x = ot.Uniform(-1.0, 1.0).getSample(20) >>> y = ot.Sample(x) >>> # Evaluation of y = ax + b (a: scale, b: translate) >>> y = y * [3] + [3.1] >>> # inverse transformation >>> inv_transformation = ot.SymbolicFunction('x', 'exp(x)') >>> y = inv_transformation(y) + ot.Normal(0, 1.0e-4).getSample(20) >>> # Estimation >>> shift = [1.0e-1] >>> boxCox, result = ot.BoxCoxFactory().buildWithLM(x, y, shift)
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- getOptimizationAlgorithm()¶
Accessor to the solver.
- Returns:
- solver
OptimizationAlgorithm The solver used for numerical optimization.
- solver
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
- setOptimizationAlgorithm(solver)¶
Accessor to the solver.
- Parameters:
- solver
OptimizationAlgorithm The solver used for numerical optimization.
- solver