DirectionalSampling¶
- class DirectionalSampling(*args)¶
Directional sampling algorithm.
Refer to Directional Simulation.
- Available constructors:
DirectionalSampling(event)
DirectionalSampling(event, rootStrategy, samplingStrategy)
- Parameters:
- event
RandomVector Event we are computing the probability of.
- rootStrategy
RootStrategy Strategy used to evaluate the frontiers of the event along each direction in the standard space.
By default
SafeAndSlow.- samplingStrategy
SamplingStrategy Strategy used to sample directions in the standard space.
By default
RandomDirection.
- event
Methods
drawProbabilityConvergence(*args)Draw the probability convergence at a given level.
Accessor to the block size.
Accessor to the object's name.
Accessor to the convergence strategy.
getEvent()Accessor to the event.
Accessor to the maximum coefficient of variation.
Accessor to the maximum iterations number.
Accessor to the maximum standard deviation.
Accessor to the maximum duration.
getName()Accessor to the object's name.
Accessor to the results.
Get the root strategy.
Get the direction sampling strategy.
hasName()Test if the object is named.
run()Launch simulation.
setBlockSize(blockSize)Accessor to the block size.
setConvergenceStrategy(convergenceStrategy)Accessor to the convergence strategy.
Accessor to the maximum coefficient of variation.
setMaximumOuterSampling(maximumOuterSampling)Accessor to the maximum iterations number.
Accessor to the maximum standard deviation.
setMaximumTimeDuration(maximumTimeDuration)Accessor to the maximum duration.
setName(name)Accessor to the object's name.
setProgressCallback(*args)Set up a progress callback.
setRootStrategy(rootStrategy)Set the root strategy.
setSamplingStrategy(samplingStrategy)Set the direction sampling strategy.
setStopCallback(*args)Set up a stop callback.
Notes
Let
 be a random vector of dimension
be a random vector of dimension  , distributed according to
the measure
, distributed according to
the measure  , and
, and  be the limit state function (where we only wrote the random input parameters). We define the event
be the limit state function (where we only wrote the random input parameters). We define the event
 by:
by:
The directional sampling algorithm estimates the probability of the event
:
The directional sampling algorithm is a variance reduction sampling method. As it is performed in the standard space, it uses the iso-probabilistic transformation associated to
(see Isoprobabilistic transformations to get more details).Let
 be the iso-probabilistic transformation:
be the iso-probabilistic transformation:  . The
random vector
. The
random vector  follows a spherical distribution, which means that it is written
as:
follows a spherical distribution, which means that it is written
as:
where
 is a scalar random variable following the radial distribution,
is a scalar random variable following the radial distribution,  is a random
vector that follows the uniform distribution on the unit sphere of dimension ,
denoted by
is a random
vector that follows the uniform distribution on the unit sphere of dimension ,
denoted by  , and
, and  are independent.
are independent.Then the probability
 can be written as:
can be written as:
For a given direction
 , let
, let  be:
be:
Then, we have:

As the radial distribution of
is known, we can evaluate exactly the probability  as soon as we know the direction .
as soon as we know the direction .The integral with respect to the directions is evaluated using a sampling method, defined by the class:~openturns.SamplingStrategy.
The directional sampling algorithm follows the steps:
A sample is generated from the uniform distribution on
: from this sample, some directions are defined, according to the
specified SamplingStrategy. We denote by the sample of the directions;
the sample of the directions;Along each direction
 , we find the frontiers of , i.e. the solutions
of
, we find the frontiers of , i.e. the solutions
of  according to the
according to the RootStrategy. From these solutions, we deduce the subset that belongs to
;
that belongs to
;For each subset
 , we compute the probability
, we compute the probability
 .
.
The probability
is computed from all the  probabilities. If
probabilities. If  directions have been used, then:
directions have been used, then:
Examples
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0)
Create the output random vector
 :
:>>> myFunction = ot.SymbolicFunction(['E', 'F', 'L', 'I'], ['-F*L^3/(3*E*I)']) >>> myDistribution = ot.Normal([50.0, 1.0, 10.0, 5.0], [1.0]*4, ot.IdentityMatrix(4)) >>> input_RV = ot.RandomVector(myDistribution) >>> output_RV = ot.CompositeRandomVector(myFunction, input_RV)
Create the event
 :
:>>> threshold = -3.0 >>> event = ot.ThresholdEvent(output_RV, ot.Less(), -3.0)
Create the directional sampling algorithm and the convergence criteria:
>>> myAlgo = ot.DirectionalSampling(event, ot.MediumSafe(), ot.OrthogonalDirection()) >>> myAlgo.setMaximumOuterSampling(150) >>> myAlgo.setBlockSize(4) >>> myAlgo.setMaximumCoefficientOfVariation(0.1) >>> # Perform the simulation
Run the algorithm and extract the estimated probability:
>>> myAlgo.run() >>> print('Probability estimate=%.6f' % myAlgo.getResult().getProbabilityEstimate()) Probability estimate=0.169716
- __init__(*args)¶
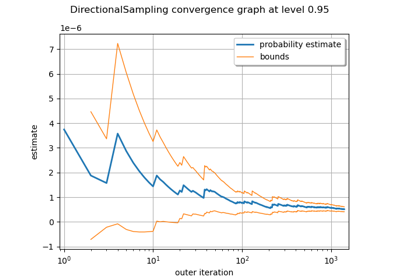
- drawProbabilityConvergence(*args)¶
Draw the probability convergence at a given level.
- Parameters:
- levelfloat, optional
The probability convergence is drawn at this given confidence length level. By default level is 0.95.
- Returns:
- grapha
Graph probability convergence graph
- grapha
- getBlockSize()¶
Accessor to the block size.
- Returns:
- blockSizeint
Number of simultaneous evaluations of the limit-state function. It is set by default to 1.
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getConvergenceStrategy()¶
Accessor to the convergence strategy.
- Returns:
- storage_strategy
HistoryStrategy Storage strategy used to store the values of the probability estimator and its variance during the simulation algorithm.
- storage_strategy
- getEvent()¶
Accessor to the event.
- Returns:
- event
RandomVector Event we want to evaluate the probability.
- event
- getMaximumCoefficientOfVariation()¶
Accessor to the maximum coefficient of variation.
- Returns:
- coefficientfloat
Maximum coefficient of variation of the simulated sample.
- getMaximumOuterSampling()¶
Accessor to the maximum iterations number.
- Returns:
- outerSamplingint
Maximum number of iterations, each iteration performing a block of evaluations.
- getMaximumStandardDeviation()¶
Accessor to the maximum standard deviation.
- Returns:
- sigmafloat,

Maximum standard deviation of the estimator.
- sigmafloat,
- getMaximumTimeDuration()¶
Accessor to the maximum duration.
- Returns:
- maximumTimeDurationfloat
Maximum optimization duration in seconds.
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- getResult()¶
Accessor to the results.
- Returns:
- results
SimulationResult Structure containing all the results obtained after simulation and created by the method
run().
- results
- getRootStrategy()¶
Get the root strategy.
- Returns:
- strategy
RootStrategy Root strategy used to evaluate the frontiers of the event along each direction in the standard space.
- strategy
- getSamplingStrategy()¶
Get the direction sampling strategy.
- Returns:
- strategy
SamplingStrategy Direction sampling strategy used to sample directions in the standard space.
- strategy
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- run()¶
Launch simulation.
See also
Notes
It launches the simulation and creates a
SimulationResult, structure containing all the results obtained after simulation. It computes the probability of occurrence of the given event by computing the empirical mean of a sample of size at most outerSampling * blockSize, this sample being built by blocks of size blockSize. It allows one to use efficiently the distribution of the computation as well as it allows one to deal with a sample size by a combination of blockSize and
outerSampling.
by a combination of blockSize and
outerSampling.
- setBlockSize(blockSize)¶
Accessor to the block size.
- Parameters:
- blockSizeint,

Number of simultaneous evaluations of the limit-state function. It is set by default to 1.
- blockSizeint,
Notes
If the function supports batch evaluations this parameter can be set to the number of available CPUs to benefit from parallel execution (multithreading, multiprocessing, …); except for the Directional Sampling, where we recommend to set it to 1. It also decides the frequency of the stopping criteria and progress callbacks update as they are called once the whole block of fonction evaluations is completed.
- setConvergenceStrategy(convergenceStrategy)¶
Accessor to the convergence strategy.
- Parameters:
- storage_strategy
HistoryStrategy Storage strategy used to store the values of the probability estimator and its variance during the simulation algorithm.
- storage_strategy
- setMaximumCoefficientOfVariation(maximumCoefficientOfVariation)¶
Accessor to the maximum coefficient of variation.
- Parameters:
- coefficientfloat
Maximum coefficient of variation of the simulated sample.
- setMaximumOuterSampling(maximumOuterSampling)¶
Accessor to the maximum iterations number.
- Parameters:
- outerSamplingint
Maximum number of iterations, each iteration performing a block of evaluations.
- setMaximumStandardDeviation(maximumStandardDeviation)¶
Accessor to the maximum standard deviation.
- Parameters:
- sigmafloat,
Maximum standard deviation of the estimator.
- sigmafloat,
- setMaximumTimeDuration(maximumTimeDuration)¶
Accessor to the maximum duration.
- Parameters:
- maximumTimeDurationfloat
Maximum optimization duration in seconds.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
- setProgressCallback(*args)¶
Set up a progress callback.
Can be used to programmatically report the progress of a simulation.
- Parameters:
- callbackcallable
Takes a float as argument as percentage of progress.
Examples
>>> import sys >>> import openturns as ot >>> experiment = ot.MonteCarloExperiment() >>> X = ot.RandomVector(ot.Normal()) >>> Y = ot.CompositeRandomVector(ot.SymbolicFunction(['X'], ['1.1*X']), X) >>> event = ot.ThresholdEvent(Y, ot.Less(), -2.0) >>> algo = ot.ProbabilitySimulationAlgorithm(event, experiment) >>> algo.setMaximumOuterSampling(100) >>> algo.setMaximumCoefficientOfVariation(-1.0) >>> def report_progress(progress): ... sys.stderr.write('-- progress=' + str(progress) + '%\n') >>> algo.setProgressCallback(report_progress) >>> algo.run()
- setRootStrategy(rootStrategy)¶
Set the root strategy.
- Parameters:
- strategy
RootStrategy Root strategy to evaluate the frontiers of the event along each direction in the standard space.
- strategy
- setSamplingStrategy(samplingStrategy)¶
Set the direction sampling strategy.
- Parameters:
- strategy
SamplingStrategy Direction sampling strategy used to sample directions in the standard space.
- strategy
- setStopCallback(*args)¶
Set up a stop callback.
Can be used to programmatically stop a simulation.
- Parameters:
- callbackcallable
Returns an int deciding whether to stop or continue.
Examples
Stop a Monte Carlo simulation algorithm using a time limit
>>> import openturns as ot >>> experiment = ot.MonteCarloExperiment() >>> X = ot.RandomVector(ot.Normal()) >>> Y = ot.CompositeRandomVector(ot.SymbolicFunction(['X'], ['1.1*X']), X) >>> event = ot.ThresholdEvent(Y, ot.Less(), -2.0) >>> algo = ot.ProbabilitySimulationAlgorithm(event, experiment) >>> algo.setMaximumOuterSampling(10000000) >>> algo.setMaximumCoefficientOfVariation(-1.0) >>> algo.setMaximumTimeDuration(0.1) >>> algo.run()
Examples using the class¶
Axial stressed beam : comparing different methods to estimate a probability