LinearLeastSquaresCalibration¶
- class LinearLeastSquaresCalibration(*args)¶
Linear least squares calibration algorithm.
- Available constructors:
LinearLeastSquaresCalibration(model, inputObservations, outputObservations, startingPoint, methodName)
LinearLeastSquaresCalibration(modelObservations, gradientObservations, outputObservations, startingPoint, methodName)
- Parameters:
- model
Function The parametric function to be calibrated.
- inputObservations2-d sequence of float
The sample of input observations. Can have dimension 0 to specify no observations.
- outputObservations2-d sequence of float
The sample of output observations.
- startingPointsequence of float
The reference value of the parameter, where the linearization of the parametric model is evaluated.
- methodNamestr
The name of the least-squares method to use for the calibration. By default, equal to QR. Possible values are SVD, QR, Cholesky.
- modelObservations2-d sequence of float
The sample of output values of the model.
- gradientObservations2-d sequence of float
The Jacobian matrix of the model with respect to the parameter.
- model
Methods
Accessor to the object's name.
Accessor to the model gradient at the startingPoint.
Accessor to the input data to be fitted.
Accessor to the name of least-squares method used for the resolution.
getModel()Accessor to the model to be fitted.
Accessor to the model evaluation at the startingPoint.
getName()Accessor to the object's name.
Accessor to the output data to be fitted.
Accessor to the parameter prior distribution.
Get the result structure.
Accessor to the parameter startingPoint.
hasName()Test if the object is named.
run()Launch the algorithm.
setName(name)Accessor to the object's name.
setResult(result)Accessor to optimization result.
Notes
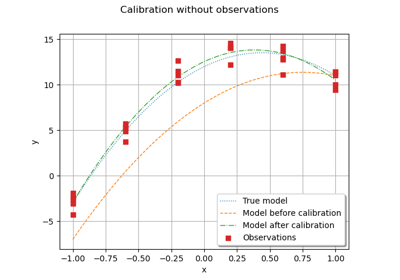
LinearLeastSquaresCalibration is the minimum variance estimator of the parameter of a given model under the assumption that this parameter acts linearly in the model.
The prior distribution of the parameter is a noninformative prior emulated using a flat
Normalcentered on the startingPoint and with a variance equal to SpecFunc.Infinity.The posterior distribution of the parameter is
Normaland reflects the variability of the optimum parameter depending on the observation sample. The associated covariance matrix may be regularized depending on the value of the key LinearLeastSquaresCalibration-Regularization in theResourceMap. Let us denote by the largest singular value of the covariance matrix.
The default value of the LinearLeastSquaresCalibration-Regularization, zero,
ensures that the singular values of the covariance matrix are left unmodified.
If this parameter is set to a nonzero, relatively small, value denoted by
the largest singular value of the covariance matrix.
The default value of the LinearLeastSquaresCalibration-Regularization, zero,
ensures that the singular values of the covariance matrix are left unmodified.
If this parameter is set to a nonzero, relatively small, value denoted by  ,
then all singular values of the covariance matrix are increased by
,
then all singular values of the covariance matrix are increased by  .
.The resulting distribution of the output error is
Normalwith a zero mean and a diagonal covariance matrix computed from the residuals. The residuals are computed based on the linearization of the model, where the Jacobian matrix is evaluated at the startingPoint. The diagonal of the covariance matrix of the output error is constant and is estimated with the unbiased variance estimator.Please read Code calibration for more details.
Examples
Calibrate a nonlinear model using linear least-squares:
>>> import openturns as ot >>> ot.RandomGenerator.SetSeed(0) >>> m = 10 >>> x = [[0.5 + i] for i in range(m)] >>> inVars = ['a', 'b', 'c', 'x'] >>> formulas = ['a + b * exp(c * x)'] >>> model = ot.SymbolicFunction(inVars, formulas) >>> p_ref = [2.8, 1.2, 0.5] >>> params = [0, 1, 2] >>> modelX = ot.ParametricFunction(model, params, p_ref) >>> y = modelX(x) >>> y += ot.Normal(0.0, 0.05).getSample(m) >>> startingPoint = [1.0]*3 >>> method = 'SVD' >>> algo = ot.LinearLeastSquaresCalibration(modelX, x, y, startingPoint, method) >>> algo.run() >>> print(algo.getResult().getParameterMAP()) [8.24019,0.0768046,0.992957]
- __init__(*args)¶
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getGradientObservations()¶
Accessor to the model gradient at the startingPoint.
- Returns:
- gradientObservation
Matrix Gradient of the model at the startingPoint point.
- gradientObservation
- getInputObservations()¶
Accessor to the input data to be fitted.
- Returns:
- data
Sample The input data to be fitted.
- data
- getMethodName()¶
Accessor to the name of least-squares method used for the resolution.
- Returns:
- namestr
Name of least-squares method used for the resolution.
- getModelObservations()¶
Accessor to the model evaluation at the startingPoint.
- Returns:
- modelObservation
Sample Evaluation of the model at the startingPoint.
- modelObservation
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- getOutputObservations()¶
Accessor to the output data to be fitted.
- Returns:
- data
Sample The output data to be fitted.
- data
- getParameterPrior()¶
Accessor to the parameter prior distribution.
- Returns:
- prior
Distribution The parameter prior distribution.
- prior
- getResult()¶
Get the result structure.
- Returns:
- resCalibration
CalibrationResult The structure containing all the results of the calibration problem.
- resCalibration
Notes
The structure contains all the results of the calibration problem.
- getStartingPoint()¶
Accessor to the parameter startingPoint.
- Returns:
- startingPoint
Point Parameter startingPoint.
- startingPoint
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- run()¶
Launch the algorithm.
Notes
It launches the algorithm and creates a
CalibrationResult, structure containing all the results.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
- setResult(result)¶
Accessor to optimization result.
- Parameters:
- result
CalibrationResult Result class.
- result