Note
Go to the end to download the full example code
Subset Sampling¶
The objective is to evaluate a probability from the Subset sampling technique.
We consider the function  defined by:
defined by:

and the input random vector  which follows a Normal distribution with independent components, and identical marginals with 0.25 mean and unit variance:
which follows a Normal distribution with independent components, and identical marginals with 0.25 mean and unit variance:
![\begin{align*}
X \sim \mathcal{N}(\mu = [0.25, 0.25], \sigma = [1,1], cov = I_2)
\end{align*}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMS4yIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzIyMi41OTQ0MTdwdCcgaGVpZ2h0PScxMS45NTUxNjhwdCcgdmlld0JveD0nMTI0LjQ2MTQ2MiAtMTMuNDQ5NjcxIDIyMi41OTQ0MTcgMTEuOTU1MTY4Jz4KPGRlZnM+CjxwYXRoIGlkPSdnMy00MCcgZD0nTTMuODg1NDMgMi45MDUxMDZDMy44ODU0MyAyLjg2OTI0IDMuODg1NDMgMi44NDUzMyAzLjY4MjE5MiAyLjY0MjA5MkMyLjQ4NjY3NSAxLjQzNDYyIDEuODE3MTg2LS41Mzc5ODMgMS44MTcxODYtMi45NzY4MzdDMS44MTcxODYtNS4yOTYxMzkgMi4zNzkwNzgtNy4yOTI2NTMgMy43NjU4NzgtOC43MDMzNjJDMy44ODU0My04LjgxMDk1OSAzLjg4NTQzLTguODM0ODY5IDMuODg1NDMtOC44NzA3MzVDMy44ODU0My04Ljk0MjQ2NiAzLjgyNTY1NC04Ljk2NjM3NiAzLjc3NzgzMy04Ljk2NjM3NkMzLjYyMjQxNi04Ljk2NjM3NiAyLjY0MjA5Mi04LjEwNTYwNCAyLjA1NjI4OS02LjkzMzk5OEMxLjQ0NjU3NS01LjcyNjUyNiAxLjE3MTYwNi00LjQ0NzMyMyAxLjE3MTYwNi0yLjk3NjgzN0MxLjE3MTYwNi0xLjkxMjgyNyAxLjMzODk3OS0uNDkwMTYyIDEuOTYwNjQ4IC43ODkwNDFDMi42NjYwMDIgMi4yMjM2NjEgMy42NDYzMjYgMy4wMDA3NDcgMy43Nzc4MzMgMy4wMDA3NDdDMy44MjU2NTQgMy4wMDA3NDcgMy44ODU0MyAyLjk3NjgzNyAzLjg4NTQzIDIuOTA1MTA2WicvPgo8cGF0aCBpZD0nZzMtNDEnIGQ9J00zLjM3MTM1Ny0yLjk3NjgzN0MzLjM3MTM1Ny0zLjg4NTQzIDMuMjUxODA2LTUuMzY3ODcgMi41ODIzMTYtNi43NTQ2N0MxLjg3Njk2MS04LjE4OTI5IC44OTY2MzgtOC45NjYzNzYgLjc2NTEzMS04Ljk2NjM3NkMuNzE3MzEtOC45NjYzNzYgLjY1NzUzNC04Ljk0MjQ2NiAuNjU3NTM0LTguODcwNzM1Qy42NTc1MzQtOC44MzQ4NjkgLjY1NzUzNC04LjgxMDk1OSAuODYwNzcyLTguNjA3NzIxQzIuMDU2Mjg5LTcuNDAwMjQ5IDIuNzI1Nzc4LTUuNDI3NjQ2IDIuNzI1Nzc4LTIuOTg4NzkyQzIuNzI1Nzc4LS42Njk0ODkgMi4xNjM4ODUgMS4zMjcwMjQgLjc3NzA4NiAyLjczNzczM0MuNjU3NTM0IDIuODQ1MzMgLjY1NzUzNCAyLjg2OTI0IC42NTc1MzQgMi45MDUxMDZDLjY1NzUzNCAyLjk3NjgzNyAuNzE3MzEgMy4wMDA3NDcgLjc2NTEzMSAzLjAwMDc0N0MuOTIwNTQ4IDMuMDAwNzQ3IDEuOTAwODcyIDIuMTM5OTc1IDIuNDg2Njc1IC45NjgzNjlDMy4wOTYzODktLjI1MTA1OSAzLjM3MTM1Ny0xLjU0MjIxNyAzLjM3MTM1Ny0yLjk3NjgzN1onLz4KPHBhdGggaWQ9J2czLTQ4JyBkPSdNNS4zNTU5MTUtMy44MjU2NTRDNS4zNTU5MTUtNC44MTc5MzMgNS4yOTYxMzktNS43ODYzMDEgNC44NjU3NTMtNi42OTQ4OTRDNC4zNzU1OTItNy42ODcxNzMgMy41MTQ4MTktNy45NTAxODcgMi45MjkwMTYtNy45NTAxODdDMi4yMzU2MTYtNy45NTAxODcgMS4zODY4LTcuNjAzNDg3IC45NDQ0NTgtNi42MTEyMDhDLjYwOTcxNC01Ljg1ODAzMiAuNDkwMTYyLTUuMTE2ODEyIC40OTAxNjItMy44MjU2NTRDLjQ5MDE2Mi0yLjY2NjAwMiAuNTczODQ4LTEuNzkzMjc1IDEuMDA0MjM0LS45NDQ0NThDMS40NzA0ODYtLjAzNTg2NiAyLjI5NTM5MiAuMjUxMDU5IDIuOTE3MDYxIC4yNTEwNTlDMy45NTcxNjEgLjI1MTA1OSA0LjU1NDkxOS0uMzcwNjEgNC45MDE2MTktMS4wNjQwMUM1LjMzMjAwNS0xLjk2MDY0OCA1LjM1NTkxNS0zLjEzMjI1NCA1LjM1NTkxNS0zLjgyNTY1NFpNMi45MTcwNjEgLjAxMTk1NUMyLjUzNDQ5NiAuMDExOTU1IDEuNzU3NDEtLjIwMzIzOCAxLjUzMDI2Mi0xLjUwNjM1MUMxLjM5ODc1NS0yLjIyMzY2MSAxLjM5ODc1NS0zLjEzMjI1NCAxLjM5ODc1NS0zLjk2OTExNkMxLjM5ODc1NS00Ljk0OTQ0IDEuMzk4NzU1LTUuODM0MTIyIDEuNTkwMDM3LTYuNTM5NDc3QzEuNzkzMjc1LTcuMzQwNDczIDIuNDAyOTg5LTcuNzExMDgzIDIuOTE3MDYxLTcuNzExMDgzQzMuMzcxMzU3LTcuNzExMDgzIDQuMDY0NzU3LTcuNDM2MTE1IDQuMjkxOTA1LTYuNDA3OTdDNC40NDczMjMtNS43MjY1MjYgNC40NDczMjMtNC43ODIwNjcgNC40NDczMjMtMy45NjkxMTZDNC40NDczMjMtMy4xNjgxMiA0LjQ0NzMyMy0yLjI1OTUyNyA0LjMxNTgxNi0xLjUzMDI2MkM0LjA4ODY2Ny0uMjE1MTkzIDMuMzM1NDkyIC4wMTE5NTUgMi45MTcwNjEgLjAxMTk1NVonLz4KPHBhdGggaWQ9J2czLTQ5JyBkPSdNMy40NDMwODgtNy42NjMyNjNDMy40NDMwODgtNy45MzgyMzIgMy40NDMwODgtNy45NTAxODcgMy4yMDM5ODUtNy45NTAxODdDMi45MTcwNjEtNy42MjczOTcgMi4zMTkzMDMtNy4xODUwNTYgMS4wODc5Mi03LjE4NTA1NlYtNi44MzgzNTZDMS4zNjI4ODktNi44MzgzNTYgMS45NjA2NDgtNi44MzgzNTYgMi42MTgxODItNy4xNDkxOTFWLS45MjA1NDhDMi42MTgxODItLjQ5MDE2MiAyLjU4MjMxNi0uMzQ2NyAxLjUzMDI2Mi0uMzQ2N0gxLjE1OTY1MVYwQzEuNDgyNDQxLS4wMjM5MSAyLjY0MjA5Mi0uMDIzOTEgMy4wMzY2MTMtLjAyMzkxUzQuNTc4ODI5LS4wMjM5MSA0LjkwMTYxOSAwVi0uMzQ2N0g0LjUzMTAwOUMzLjQ3ODk1NC0uMzQ2NyAzLjQ0MzA4OC0uNDkwMTYyIDMuNDQzMDg4LS45MjA1NDhWLTcuNjYzMjYzWicvPgo8cGF0aCBpZD0nZzMtNTAnIGQ9J001LjI2MDI3NC0yLjAwODQ2OEg0Ljk5NzI2QzQuOTYxMzk1LTEuODA1MjMgNC44NjU3NTMtMS4xNDc2OTYgNC43NDYyMDItLjk1NjQxM0M0LjY2MjUxNi0uODQ4ODE3IDMuOTgxMDcxLS44NDg4MTcgMy42MjI0MTYtLjg0ODgxN0gxLjQxMDcxQzEuNzMzNDk5LTEuMTIzNzg2IDIuNDYyNzY1LTEuODg4OTE3IDIuNzczNTk5LTIuMTc1ODQxQzQuNTkwNzg1LTMuODQ5NTY0IDUuMjYwMjc0LTQuNDcxMjMzIDUuMjYwMjc0LTUuNjU0Nzk1QzUuMjYwMjc0LTcuMDI5NjM5IDQuMTcyMzU0LTcuOTUwMTg3IDIuNzg1NTU0LTcuOTUwMTg3Uy41ODU4MDMtNi43NjY2MjUgLjU4NTgwMy01LjczODQ4MUMuNTg1ODAzLTUuMTI4NzY3IDEuMTExODMxLTUuMTI4NzY3IDEuMTQ3Njk2LTUuMTI4NzY3QzEuMzk4NzU1LTUuMTI4NzY3IDEuNzA5NTg5LTUuMzA4MDk1IDEuNzA5NTg5LTUuNjkwNjZDMS43MDk1ODktNi4wMjU0MDUgMS40ODI0NDEtNi4yNTI1NTMgMS4xNDc2OTYtNi4yNTI1NTNDMS4wNDAxLTYuMjUyNTUzIDEuMDE2MTg5LTYuMjUyNTUzIC45ODAzMjQtNi4yNDA1OThDMS4yMDc0NzItNy4wNTM1NDkgMS44NTMwNTEtNy42MDM0ODcgMi42MzAxMzctNy42MDM0ODdDMy42NDYzMjYtNy42MDM0ODcgNC4yNjc5OTUtNi43NTQ2NyA0LjI2Nzk5NS01LjY1NDc5NUM0LjI2Nzk5NS00LjYzODYwNSAzLjY4MjE5Mi0zLjc1MzkyMyAzLjAwMDc0Ny0yLjk4ODc5MkwuNTg1ODAzLS4yODY5MjRWMEg0Ljk0OTQ0TDUuMjYwMjc0LTIuMDA4NDY4WicvPgo8cGF0aCBpZD0nZzMtNTMnIGQ9J00xLjUzMDI2Mi02Ljg1MDMxMUMyLjA0NDMzNC02LjY4MjkzOSAyLjQ2Mjc2NS02LjY3MDk4NCAyLjU5NDI3MS02LjY3MDk4NEMzLjk0NTIwNS02LjY3MDk4NCA0LjgwNTk3OC03LjY2MzI2MyA0LjgwNTk3OC03LjgzMDYzNUM0LjgwNTk3OC03Ljg3ODQ1NiA0Ljc4MjA2Ny03LjkzODIzMiA0LjcxMDMzNi03LjkzODIzMkM0LjY4NjQyNi03LjkzODIzMiA0LjY2MjUxNi03LjkzODIzMiA0LjU1NDkxOS03Ljg5MDQxMUMzLjg4NTQzLTcuNjAzNDg3IDMuMzExNTgyLTcuNTY3NjIxIDMuMDAwNzQ3LTcuNTY3NjIxQzIuMjExNzA2LTcuNTY3NjIxIDEuNjQ5ODEzLTcuODA2NzI1IDEuNDIyNjY1LTcuOTAyMzY2QzEuMzM4OTc5LTcuOTM4MjMyIDEuMzE1MDY4LTcuOTM4MjMyIDEuMzAzMTEzLTcuOTM4MjMyQzEuMjA3NDcyLTcuOTM4MjMyIDEuMjA3NDcyLTcuODY2NTAxIDEuMjA3NDcyLTcuNjc1MjE4Vi00LjEyNDUzM0MxLjIwNzQ3Mi0zLjkwOTM0IDEuMjA3NDcyLTMuODM3NjA5IDEuMzUwOTM0LTMuODM3NjA5QzEuNDEwNzEtMy44Mzc2MDkgMS40MjI2NjUtMy44NDk1NjQgMS41NDIyMTctMy45OTMwMjZDMS44NzY5NjEtNC40ODMxODggMi40Mzg4NTQtNC43NzAxMTIgMy4wMzY2MTMtNC43NzAxMTJDMy42NzAyMzctNC43NzAxMTIgMy45ODEwNzEtNC4xODQzMDkgNC4wNzY3MTItMy45ODEwNzFDNC4yNzk5NS0zLjUxNDgxOSA0LjI5MTkwNS0yLjkyOTAxNiA0LjI5MTkwNS0yLjQ3NDcyUzQuMjkxOTA1LTEuMzM4OTc5IDMuOTU3MTYxLS44MDA5OTZDMy42OTQxNDctLjM3MDYxIDMuMjI3ODk1LS4wNzE3MzEgMi43MDE4NjgtLjA3MTczMUMxLjkxMjgyNy0uMDcxNzMxIDEuMTM1NzQxLS42MDk3MTQgLjkyMDU0OC0xLjQ4MjQ0MUMuOTgwMzI0LTEuNDU4NTMxIDEuMDUyMDU1LTEuNDQ2NTc1IDEuMTExODMxLTEuNDQ2NTc1QzEuMzE1MDY4LTEuNDQ2NTc1IDEuNjM3ODU4LTEuNTY2MTI3IDEuNjM3ODU4LTEuOTcyNjAzQzEuNjM3ODU4LTIuMzA3MzQ3IDEuNDEwNzEtMi40OTg2MyAxLjExMTgzMS0yLjQ5ODYzQy44OTY2MzgtMi40OTg2MyAuNTg1ODAzLTIuMzkxMDM0IC41ODU4MDMtMS45MjQ3ODJDLjU4NTgwMy0uOTA4NTkzIDEuMzk4NzU1IC4yNTEwNTkgMi43MjU3NzggLjI1MTA1OUM0LjA3NjcxMiAuMjUxMDU5IDUuMjYwMjc0LS44ODQ2ODIgNS4yNjAyNzQtMi40MDI5ODlDNS4yNjAyNzQtMy44MjU2NTQgNC4zMDM4NjEtNS4wMDkyMTUgMy4wNDg1NjgtNS4wMDkyMTVDMi4zNjcxMjMtNS4wMDkyMTUgMS44NDEwOTYtNC43MTAzMzYgMS41MzAyNjItNC4zNzU1OTJWLTYuODUwMzExWicvPgo8cGF0aCBpZD0nZzMtNjEnIGQ9J004LjA2OTczOC0zLjg3MzQ3NEM4LjIzNzExMS0zLjg3MzQ3NCA4LjQ1MjMwNC0zLjg3MzQ3NCA4LjQ1MjMwNC00LjA4ODY2N0M4LjQ1MjMwNC00LjMxNTgxNiA4LjI0OTA2Ni00LjMxNTgxNiA4LjA2OTczOC00LjMxNTgxNkgxLjAyODE0NEMuODYwNzcyLTQuMzE1ODE2IC42NDU1NzktNC4zMTU4MTYgLjY0NTU3OS00LjEwMDYyM0MuNjQ1NTc5LTMuODczNDc0IC44NDg4MTctMy44NzM0NzQgMS4wMjgxNDQtMy44NzM0NzRIOC4wNjk3MzhaTTguMDY5NzM4LTEuNjQ5ODEzQzguMjM3MTExLTEuNjQ5ODEzIDguNDUyMzA0LTEuNjQ5ODEzIDguNDUyMzA0LTEuODY1MDA2QzguNDUyMzA0LTIuMDkyMTU0IDguMjQ5MDY2LTIuMDkyMTU0IDguMDY5NzM4LTIuMDkyMTU0SDEuMDI4MTQ0Qy44NjA3NzItMi4wOTIxNTQgLjY0NTU3OS0yLjA5MjE1NCAuNjQ1NTc5LTEuODc2OTYxQy42NDU1NzktMS42NDk4MTMgLjg0ODgxNy0xLjY0OTgxMyAxLjAyODE0NC0xLjY0OTgxM0g4LjA2OTczOFonLz4KPHBhdGggaWQ9J2czLTkxJyBkPSdNMi45ODg3OTIgMi45ODg3OTJWMi41NDY0NTFIMS44MjkxNDFWLTguNTI0MDM1SDIuOTg4NzkyVi04Ljk2NjM3NkgxLjM4NjhWMi45ODg3OTJIMi45ODg3OTJaJy8+CjxwYXRoIGlkPSdnMy05MycgZD0nTTEuODUzMDUxLTguOTY2Mzc2SC4yNTEwNTlWLTguNTI0MDM1SDEuNDEwNzFWMi41NDY0NTFILjI1MTA1OVYyLjk4ODc5MkgxLjg1MzA1MVYtOC45NjYzNzZaJy8+CjxwYXRoIGlkPSdnMi01MCcgZD0nTTIuMjQ3NTcyLTEuNjI1OTAzQzIuMzc1MDkzLTEuNzQ1NDU1IDIuNzA5ODM4LTIuMDA4NDY4IDIuODM3MzYtMi4xMjAwNUMzLjMzMTUwNy0yLjU3NDM0NiAzLjgwMTc0My0zLjAxMjcwMiAzLjgwMTc0My0zLjczNzk4M0MzLjgwMTc0My00LjY4NjQyNiAzLjAwNDczMi01LjMwMDEyNSAyLjAwODQ2OC01LjMwMDEyNUMxLjA1MjA1NS01LjMwMDEyNSAuNDIyNDE2LTQuNTc0ODQ0IC40MjI0MTYtMy44NjU1MDRDLjQyMjQxNi0zLjQ3NDk2OSAuNzMzMjUtMy40MTkxNzggLjg0NDgzMi0zLjQxOTE3OEMxLjAxMjIwNC0zLjQxOTE3OCAxLjI1OTI3OC0zLjUzODczIDEuMjU5Mjc4LTMuODQxNTk0QzEuMjU5Mjc4LTQuMjU2MDQgLjg2MDc3Mi00LjI1NjA0IC43NjUxMzEtNC4yNTYwNEMuOTk2MjY0LTQuODM3ODU4IDEuNTMwMjYyLTUuMDM3MTExIDEuOTIwNzk3LTUuMDM3MTExQzIuNjYyMDE3LTUuMDM3MTExIDMuMDQ0NTgzLTQuNDA3NDcyIDMuMDQ0NTgzLTMuNzM3OTgzQzMuMDQ0NTgzLTIuOTA5MDkxIDIuNDYyNzY1LTIuMzAzMzYyIDEuNTIyMjkxLTEuMzM4OTc5TC41MTgwNTctLjMwMjg2NEMuNDIyNDE2LS4yMTUxOTMgLjQyMjQxNi0uMTk5MjUzIC40MjI0MTYgMEgzLjU3MDYxTDMuODAxNzQzLTEuNDI2NjVIMy41NTQ2N0MzLjUzMDc2LTEuMjY3MjQ4IDMuNDY2OTk5LS44Njg3NDIgMy4zNzEzNTctLjcxNzMxQzMuMzIzNTM3LS42NTM1NDkgMi43MTc4MDgtLjY1MzU0OSAyLjU5MDI4Ni0uNjUzNTQ5SDEuMTcxNjA2TDIuMjQ3NTcyLTEuNjI1OTAzWicvPgo8cGF0aCBpZD0nZzAtMjQnIGQ9J004LjYzMTYzMS0zLjk5MzAyNkM4LjYzMTYzMS00LjI1NjA0IDguNTU5OS00LjM3NTU5MiA4LjQ2NDI1OS00LjM3NTU5MkM4LjQwNDQ4My00LjM3NTU5MiA4LjMwODg0Mi00LjI5MTkwNSA4LjI5Njg4Ny00LjA2NDc1N0M4LjI0OTA2Ni0yLjkxNzA2MSA3LjQ2MDAyNS0yLjI1OTUyNyA2LjYyMzE2My0yLjI1OTUyN0M1Ljg2OTk4OC0yLjI1OTUyNyA1LjI5NjEzOS0yLjc3MzU5OSA0LjcxMDMzNi0zLjI4NzY3MUM0LjEwMDYyMy0zLjgzNzYwOSAzLjQ3ODk1NC00LjM4NzU0NyAyLjY2NjAwMi00LjM4NzU0N0MxLjM2Mjg4OS00LjM4NzU0NyAuNjU3NTM0LTMuMDcyNDc4IC42NTc1MzQtMS45ODQ1NThDLjY1NzUzNC0xLjYwMTk5MyAuODEyOTUxLTEuNjAxOTkzIC44MjQ5MDctMS42MDE5OTNDLjk1NjQxMy0xLjYwMTk5MyAuOTkyMjc5LTEuODQxMDk2IC45OTIyNzktMS44NzY5NjFDMS4wNDAxLTMuMTkyMDMgMS45MzY3MzctMy43MTgwNTcgMi42NjYwMDItMy43MTgwNTdDMy40MTkxNzgtMy43MTgwNTcgMy45OTMwMjYtMy4yMDM5ODUgNC41Nzg4MjktMi42ODk5MTNDNS4xODg1NDMtMi4xMzk5NzUgNS44MTAyMTItMS41OTAwMzcgNi42MjMxNjMtMS41OTAwMzdDNy45MjYyNzYtMS41OTAwMzcgOC42MzE2MzEtMi45MDUxMDYgOC42MzE2MzEtMy45OTMwMjZaJy8+CjxwYXRoIGlkPSdnMC03OCcgZD0nTTMuNjU4MjgxLTYuODYyMjY3QzMuODczNDc0LTYuMjQwNTk4IDQuMTM2NDg4LTUuMzQzOTYgNC42NzQ0NzEtMy44NzM0NzRDNS40Mjc2NDYtMS44NDEwOTYgNS43NjIzOTEtMS4wOTk4NzUgNi40OTE2NTYgLjAzNTg2NkM2LjY1OTAyOSAuMjg2OTI0IDYuNjcwOTg0IC4yOTg4NzkgNi43Nzg1OCAuMjk4ODc5QzYuOTQ1OTUzIC4yOTg4NzkgNy4xOTcwMTEgLjE1NTQxNyA3LjMyODUxOCAuMDU5Nzc2QzcuNDk1ODktLjA5NTY0MSA3LjUwNzg0Ni0uMTA3NTk3IDcuNjM5MzUyLS42OTM0QzguMzU2NjYzLTMuODM3NjA5IDkuMjY1MjU1LTcuMTEzMzI1IDkuNTA0MzU5LTcuNjYzMjYzQzkuNTE2MzE0LTcuNjg3MTczIDkuNzU1NDE3LTguMTQxNDY5IDExLjIyNTkwMy04LjE2NTM4QzExLjQ2NTAwNi04LjE3NzMzNSAxMS42OTIxNTQtOC44MTA5NTkgMTEuNjkyMTU0LTkuMDczOTczQzExLjY5MjE1NC05LjI2NTI1NSAxMS42MjA0MjMtOS4yNjUyNTUgMTEuNDUzMDUxLTkuMjY1MjU1QzEwLjI1NzUzNC05LjI2NTI1NSA5LjcxOTU1Mi04Ljc2MzEzOCA5LjU3NjA5LTguNjA3NzIxQzkuMjQxMzQ1LTguMTc3MzM1IDguOTU0NDIxLTcuMzA0NjA4IDguNDA0NDgzLTUuMzA4MDk1QzcuOTg2MDUyLTMuNzc3ODMzIDcuNjAzNDg3LTIuMjIzNjYxIDcuMjMyODc3LS42ODE0NDVDNi41NzUzNDItMS42NzM3MjQgNi4yMDQ3MzItMi42MTgxODIgNS42MzA4ODQtNC4xNjAzOTlDNC45OTcyNi01Ljg1ODAzMiA0LjYxNDY5NS03LjEwMTM3IDQuMjkxOTA1LTguMTc3MzM1QzQuMjIwMTc0LTguNDE2NDM4IDQuMjA4MjE5LTguNDI4Mzk0IDQuMTAwNjIzLTguNDI4Mzk0QzQuMDc2NzEyLTguNDI4Mzk0IDMuODM3NjA5LTguNDI4Mzk0IDMuNDkwOTA5LTguMTQxNDY5QzMuMzcxMzU3LTguMDMzODczIDMuMzU5NDAyLTcuOTI2Mjc2IDMuMzQ3NDQ3LTcuNzk0NzdDMy4wMTI3MDItNC42MTQ2OTUgMS44ODg5MTctMS40NzA0ODYgMS41NjYxMjctLjg5NjYzOEMxLjQ3MDQ4Ni0uNzE3MzEgMS4zMjcwMjQtLjUwMjExNyAxLjA4NzkyLS41MDIxMTdDLjk2ODM2OS0uNTAyMTE3IC41MDIxMTctLjU2MTg5MyAuMTkxMjgzLS44NDg4MTdDLjEzMTUwNy0uODk2NjM4IC4xMDc1OTctLjg5NjYzOCAuMDk1NjQxLS44OTY2MzhDLS4wOTU2NDEtLjg5NjYzOC0uMzQ2Ny0uMjk4ODc5LS4zNDY3LS4wMTE5NTVDLS4zNDY3IC4zNTg2NTUgLjM4MjU2NSAuNTk3NzU4IC43MTczMSAuNTk3NzU4QzEuNDgyNDQxIC41OTc3NTggMi4wOTIxNTQtMS4wODc5MiAyLjI4MzQzNy0xLjYzNzg1OEMzLjA2MDUyMy0zLjgwMTc0MyAzLjQzMTEzMy01LjU4MzA2NCAzLjY1ODI4MS02Ljg2MjI2N1onLz4KPHBhdGggaWQ9J2cxLTIyJyBkPSdNMS43MjE1NDQtLjI2MzAxNEMyLjAyMDQyMyAuMDExOTU1IDIuNDYyNzY1IC4xMTk1NTIgMi44NjkyNCAuMTE5NTUyQzMuNjM0MzcxIC4xMTk1NTIgNC4xNjAzOTktLjM5NDUyMSA0LjQzNTM2Ny0uNzY1MTMxQzQuNTU0OTE5LS4xMzE1MDcgNS4wNTcwMzYgLjExOTU1MiA1LjQ3NTQ2NyAuMTE5NTUyQzUuODM0MTIyIC4xMTk1NTIgNi4xMjEwNDYtLjA5NTY0MSA2LjMzNjIzOS0uNTI2MDI3QzYuNTI3NTIyLS45MzI1MDMgNi42OTQ4OTQtMS42NjE3NjggNi42OTQ4OTQtMS43MDk1ODlDNi42OTQ4OTQtMS43NjkzNjUgNi42NDcwNzMtMS44MTcxODYgNi41NzUzNDItMS44MTcxODZDNi40Njc3NDYtMS44MTcxODYgNi40NTU3OTEtMS43NTc0MSA2LjQwNzk3LTEuNTc4MDgyQzYuMjI4NjQzLS44NzI3MjcgNi4wMDE0OTQtLjExOTU1MiA1LjUxMTMzMy0uMTE5NTUyQzUuMTY0NjMzLS4xMTk1NTIgNS4xNDA3MjItLjQzMDM4NiA1LjE0MDcyMi0uNjY5NDg5QzUuMTQwNzIyLS45NDQ0NTggNS4yNDgzMTktMS4zNzQ4NDQgNS4zMzIwMDUtMS43MzM0OTlMNS42NjY3NS0zLjAyNDY1OEM1LjcxNDU3LTMuMjUxODA2IDUuODQ2MDc3LTMuNzg5Nzg4IDUuOTA1ODUzLTQuMDA0OTgxQzUuOTc3NTg0LTQuMjkxOTA1IDYuMTA5MDkxLTQuODA1OTc4IDYuMTA5MDkxLTQuODUzNzk4QzYuMTA5MDkxLTUuMDMzMTI2IDUuOTY1NjI5LTUuMTUyNjc3IDUuNzg2MzAxLTUuMTUyNjc3QzUuNjc4NzA1LTUuMTUyNjc3IDUuNDI3NjQ2LTUuMTA0ODU3IDUuMzMyMDA1LTQuNzQ2MjAyTDQuNDk1MTQzLTEuNDIyNjY1QzQuNDM1MzY3LTEuMTgzNTYyIDQuNDM1MzY3LTEuMTU5NjUxIDQuMjc5OTUtLjk2ODM2OUM0LjEzNjQ4OC0uNzY1MTMxIDMuNjcwMjM3LS4xMTk1NTIgMi45MTcwNjEtLjExOTU1MkMyLjI0NzU3Mi0uMTE5NTUyIDIuMDMyMzc5LS42MDk3MTQgMi4wMzIzNzktMS4xNzE2MDZDMi4wMzIzNzktMS41MTgzMDYgMi4xMzk5NzUtMS45MzY3MzcgMi4xODc3OTYtMi4xMzk5NzVMMi43MjU3NzgtNC4yOTE5MDVDMi43ODU1NTQtNC41MTkwNTQgMi44ODExOTYtNC45MDE2MTkgMi44ODExOTYtNC45NzMzNUMyLjg4MTE5Ni01LjE2NDYzMyAyLjcyNTc3OC01LjI3MjIyOSAyLjU3MDM2MS01LjI3MjIyOUMyLjQ2Mjc2NS01LjI3MjIyOSAyLjE5OTc1MS01LjIzNjM2NCAyLjEwNDExLTQuODUzNzk4TC4zNzA2MSAyLjA2ODI0NEMuMzU4NjU1IDIuMTI4MDIgLjMzNDc0NSAyLjE5OTc1MSAuMzM0NzQ1IDIuMjcxNDgyQy4zMzQ3NDUgMi40NTA4MDkgLjQ3ODIwNyAyLjU3MDM2MSAuNjU3NTM0IDIuNTcwMzYxQzEuMDA0MjM0IDIuNTcwMzYxIDEuMDc1OTY1IDIuMjk1MzkyIDEuMTU5NjUxIDEuOTYwNjQ4TDEuNzIxNTQ0LS4yNjMwMTRaJy8+CjxwYXRoIGlkPSdnMS0yNycgZD0nTTYuMDczMjI1LTQuNTA3MDk4QzYuMjI4NjQzLTQuNTA3MDk4IDYuNjIzMTYzLTQuNTA3MDk4IDYuNjIzMTYzLTQuODg5NjY0QzYuNjIzMTYzLTUuMTUyNjc3IDYuMzk2MDE1LTUuMTUyNjc3IDYuMTgwODIyLTUuMTUyNjc3SDMuNTM4NzNDMS43NDU0NTUtNS4xNTI2NzcgLjQ1NDI5Ni0zLjE1NjE2NCAuNDU0Mjk2LTEuNzQ1NDU1Qy40NTQyOTYtLjcyOTI2NSAxLjExMTgzMSAuMTE5NTUyIDIuMTg3Nzk2IC4xMTk1NTJDMy41OTg1MDYgLjExOTU1MiA1LjE0MDcyMi0xLjM5ODc1NSA1LjE0MDcyMi0zLjE5MjAzQzUuMTQwNzIyLTMuNjU4MjgxIDUuMDMzMTI2LTQuMTEyNTc4IDQuNzQ2MjAyLTQuNTA3MDk4SDYuMDczMjI1Wk0yLjE5OTc1MS0uMTE5NTUyQzEuNTkwMDM3LS4xMTk1NTIgMS4xNDc2OTYtLjU4NTgwMyAxLjE0NzY5Ni0xLjQxMDcxQzEuMTQ3Njk2LTIuMTI4MDIgMS41NzgwODItNC41MDcwOTggMy4zMzU0OTItNC41MDcwOThDMy44NDk1NjQtNC41MDcwOTggNC40MjM0MTItNC4yNTYwNCA0LjQyMzQxMi0zLjMzNTQ5MkM0LjQyMzQxMi0yLjkxNzA2MSA0LjIzMjEzLTEuOTEyODI3IDMuODEzNjk5LTEuMjE5NDI3QzMuMzgzMzEzLS41MTQwNzIgMi43Mzc3MzMtLjExOTU1MiAyLjE5OTc1MS0uMTE5NTUyWicvPgo8cGF0aCBpZD0nZzEtNTgnIGQ9J00yLjE5OTc1MS0uNTczODQ4QzIuMTk5NzUxLS45MjA1NDggMS45MTI4MjctMS4xNTk2NTEgMS42MjU5MDMtMS4xNTk2NTFDMS4yNzkyMDMtMS4xNTk2NTEgMS4wNDAxLS44NzI3MjcgMS4wNDAxLS41ODU4MDNDMS4wNDAxLS4yMzkxMDMgMS4zMjcwMjQgMCAxLjYxMzk0OCAwQzEuOTYwNjQ4IDAgMi4xOTk3NTEtLjI4NjkyNCAyLjE5OTc1MS0uNTczODQ4WicvPgo8cGF0aCBpZD0nZzEtNTknIGQ9J00yLjMzMTI1OCAuMDQ3ODIxQzIuMzMxMjU4LS42NDU1NzkgMi4xMDQxMS0xLjE1OTY1MSAxLjYxMzk0OC0xLjE1OTY1MUMxLjIzMTM4Mi0xLjE1OTY1MSAxLjA0MDEtLjg0ODgxNyAxLjA0MDEtLjU4NTgwM1MxLjIxOTQyNyAwIDEuNjI1OTAzIDBDMS43ODEzMiAwIDEuOTEyODI3LS4wNDc4MjEgMi4wMjA0MjMtLjE1NTQxN0MyLjA0NDMzNC0uMTc5MzI4IDIuMDU2Mjg5LS4xNzkzMjggMi4wNjgyNDQtLjE3OTMyOEMyLjA5MjE1NC0uMTc5MzI4IDIuMDkyMTU0LS4wMTE5NTUgMi4wOTIxNTQgLjA0NzgyMUMyLjA5MjE1NCAuNDQyMzQxIDIuMDIwNDIzIDEuMjE5NDI3IDEuMzI3MDI0IDEuOTk2NTEzQzEuMTk1NTE3IDIuMTM5OTc1IDEuMTk1NTE3IDIuMTYzODg1IDEuMTk1NTE3IDIuMTg3Nzk2QzEuMTk1NTE3IDIuMjQ3NTcyIDEuMjU1MjkzIDIuMzA3MzQ3IDEuMzE1MDY4IDIuMzA3MzQ3QzEuNDEwNzEgMi4zMDczNDcgMi4zMzEyNTggMS40MjI2NjUgMi4zMzEyNTggLjA0NzgyMVonLz4KPHBhdGggaWQ9J2cxLTczJyBkPSdNNC4zOTk1MDItNy4yODA2OTdDNC41MDcwOTgtNy42OTkxMjggNC41MzEwMDktNy44MTg2OCA1LjQwMzczNi03LjgxODY4QzUuNjY2NzUtNy44MTg2OCA1Ljc2MjM5MS03LjgxODY4IDUuNzYyMzkxLTguMDQ1ODI4QzUuNzYyMzkxLTguMTY1MzggNS42MzA4ODQtOC4xNjUzOCA1LjU5NTAxOS04LjE2NTM4QzUuMzc5ODI2LTguMTY1MzggNS4xMTY4MTItOC4xNDE0NjkgNC45MDE2MTktOC4xNDE0NjlIMy40MzExMzNDMy4xOTIwMy04LjE0MTQ2OSAyLjkxNzA2MS04LjE2NTM4IDIuNjc3OTU4LTguMTY1MzhDMi41ODIzMTYtOC4xNjUzOCAyLjQ1MDgwOS04LjE2NTM4IDIuNDUwODA5LTcuOTM4MjMyQzIuNDUwODA5LTcuODE4NjggMi41NDY0NTEtNy44MTg2OCAyLjc4NTU1NC03LjgxODY4QzMuNTI2Nzc1LTcuODE4NjggMy41MjY3NzUtNy43MjMwMzkgMy41MjY3NzUtNy41OTE1MzJDMy41MjY3NzUtNy41MDc4NDYgMy41MDI4NjQtNy40MzYxMTUgMy40Nzg5NTQtNy4zMjg1MThMMS44NjUwMDYtLjg4NDY4MkMxLjc1NzQxLS40NjYyNTIgMS43MzM0OTktLjM0NjcgLjg2MDc3Mi0uMzQ2N0MuNTk3NzU4LS4zNDY3IC40OTAxNjItLjM0NjcgLjQ5MDE2Mi0uMTE5NTUyQy40OTAxNjIgMCAuNjA5NzE0IDAgLjY2OTQ4OSAwQy44ODQ2ODIgMCAxLjE0NzY5Ni0uMDIzOTEgMS4zNjI4ODktLjAyMzkxSDIuODMzMzc1QzMuMDcyNDc4LS4wMjM5MSAzLjMzNTQ5MiAwIDMuNTc0NTk1IDBDMy42NzAyMzcgMCAzLjgxMzY5OSAwIDMuODEzNjk5LS4yMTUxOTNDMy44MTM2OTktLjM0NjcgMy43NDE5NjgtLjM0NjcgMy40Nzg5NTQtLjM0NjdDMi43Mzc3MzMtLjM0NjcgMi43Mzc3MzMtLjQ0MjM0MSAyLjczNzczMy0uNTg1ODAzQzIuNzM3NzMzLS42MDk3MTQgMi43Mzc3MzMtLjY2OTQ4OSAyLjc4NTU1NC0uODYwNzcyTDQuMzk5NTAyLTcuMjgwNjk3WicvPgo8cGF0aCBpZD0nZzEtODgnIGQ9J001LjY3ODcwNS00Ljg1Mzc5OEw0LjU1NDkxOS03LjQ3MTk4QzQuNzEwMzM2LTcuNzU4OTA0IDUuMDY4OTkxLTcuODA2NzI1IDUuMjEyNDUzLTcuODE4NjhDNS4yODQxODQtNy44MTg2OCA1LjQxNTY5MS03LjgzMDYzNSA1LjQxNTY5MS04LjAzMzg3M0M1LjQxNTY5MS04LjE2NTM4IDUuMzA4MDk1LTguMTY1MzggNS4yMzYzNjQtOC4xNjUzOEM1LjAzMzEyNi04LjE2NTM4IDQuNzk0MDIyLTguMTQxNDY5IDQuNTkwNzg1LTguMTQxNDY5SDMuODk3Mzg1QzMuMTY4MTItOC4xNDE0NjkgMi42NDIwOTItOC4xNjUzOCAyLjYzMDEzNy04LjE2NTM4QzIuNTM0NDk2LTguMTY1MzggMi40MTQ5NDQtOC4xNjUzOCAyLjQxNDk0NC03LjkzODIzMkMyLjQxNDk0NC03LjgxODY4IDIuNTIyNTQtNy44MTg2OCAyLjY3Nzk1OC03LjgxODY4QzMuMzcxMzU3LTcuODE4NjggMy40MTkxNzgtNy42OTkxMjggMy41Mzg3My03LjQxMjIwNEw0Ljk2MTM5NS00LjA4ODY2N0wyLjM2NzEyMy0xLjMxNTA2OEMxLjkzNjczNy0uODQ4ODE3IDEuNDIyNjY1LS4zOTQ1MjEgLjUzNzk4My0uMzQ2N0MuMzk0NTIxLS4zMzQ3NDUgLjI5ODg3OS0uMzM0NzQ1IC4yOTg4NzktLjExOTU1MkMuMjk4ODc5LS4wODM2ODYgLjMxMDgzNCAwIC40NDIzNDEgMEMuNjA5NzE0IDAgLjc4OTA0MS0uMDIzOTEgLjk1NjQxMy0uMDIzOTFIMS41MTgzMDZDMS45MDA4NzItLjAyMzkxIDIuMzE5MzAzIDAgMi42ODk5MTMgMEMyLjc3MzU5OSAwIDIuOTE3MDYxIDAgMi45MTcwNjEtLjIxNTE5M0MyLjkxNzA2MS0uMzM0NzQ1IDIuODMzMzc1LS4zNDY3IDIuNzYxNjQ0LS4zNDY3QzIuNTIyNTQtLjM3MDYxIDIuMzY3MTIzLS41MDIxMTcgMi4zNjcxMjMtLjY5MzRDMi4zNjcxMjMtLjg5NjYzOCAyLjUxMDU4NS0xLjA0MDEgMi44NTcyODUtMS4zOTg3NTVMMy45MjEyOTUtMi41NTg0MDZDNC4xODQzMDktMi44MzMzNzUgNC44MTc5MzMtMy41MjY3NzUgNS4wODA5NDYtMy43ODk3ODhMNi4zMzYyMzktLjg0ODgxN0M2LjM0ODE5NC0uODI0OTA3IDYuMzk2MDE1LS43MDUzNTUgNi4zOTYwMTUtLjY5MzRDNi4zOTYwMTUtLjU4NTgwMyA2LjEzMzAwMS0uMzcwNjEgNS43NTA0MzYtLjM0NjdDNS42Nzg3MDUtLjM0NjcgNS41NDcxOTgtLjMzNDc0NSA1LjU0NzE5OC0uMTE5NTUyQzUuNTQ3MTk4IDAgNS42NjY3NSAwIDUuNzI2NTI2IDBDNS45Mjk3NjMgMCA2LjE2ODg2Ny0uMDIzOTEgNi4zNzIxMDUtLjAyMzkxSDcuNjg3MTczQzcuOTAyMzY2LS4wMjM5MSA4LjEyOTUxNCAwIDguMzMyNzUyIDBDOC40MTY0MzggMCA4LjU0Nzk0NSAwIDguNTQ3OTQ1LS4yMjcxNDhDOC41NDc5NDUtLjM0NjcgOC40MjgzOTQtLjM0NjcgOC4zMjA3OTctLjM0NjdDNy42MDM0ODctLjM1ODY1NSA3LjU3OTU3Ny0uNDE4NDMxIDcuMzc2MzM5LS44NjA3NzJMNS43OTgyNTctNC41NjY4NzRMNy4zMTY1NjMtNi4xOTI3NzdDNy40MzYxMTUtNi4zMTIzMjkgNy43MTEwODMtNi42MTEyMDggNy44MTg2OC02LjczMDc2QzguMzMyNzUyLTcuMjY4NzQyIDguODEwOTU5LTcuNzU4OTA0IDkuNzc5MzI4LTcuODE4NjhDOS44OTg4NzktNy44MzA2MzUgMTAuMDE4NDMxLTcuODMwNjM1IDEwLjAxODQzMS04LjAzMzg3M0MxMC4wMTg0MzEtOC4xNjUzOCA5LjkxMDgzNC04LjE2NTM4IDkuODYzMDE0LTguMTY1MzhDOS42OTU2NDEtOC4xNjUzOCA5LjUxNjMxNC04LjE0MTQ2OSA5LjM0ODk0MS04LjE0MTQ2OUg4Ljc5OTAwNEM4LjQxNjQzOC04LjE0MTQ2OSA3Ljk5ODAwNy04LjE2NTM4IDcuNjI3Mzk3LTguMTY1MzhDNy41NDM3MTEtOC4xNjUzOCA3LjQwMDI0OS04LjE2NTM4IDcuNDAwMjQ5LTcuOTUwMTg3QzcuNDAwMjQ5LTcuODMwNjM1IDcuNDgzOTM1LTcuODE4NjggNy41NTU2NjYtNy44MTg2OEM3Ljc0Njk0OS03Ljc5NDc3IDcuOTUwMTg3LTcuNjk5MTI4IDcuOTUwMTg3LTcuNDcxOThMNy45MzgyMzItNy40NDgwN0M3LjkyNjI3Ni03LjM2NDM4NCA3LjkwMjM2Ni03LjI0NDgzMiA3Ljc3MDg1OS03LjEwMTM3TDUuNjc4NzA1LTQuODUzNzk4WicvPgo8cGF0aCBpZD0nZzEtOTknIGQ9J000LjY3NDQ3MS00LjQ5NTE0M0M0LjQ0NzMyMy00LjQ5NTE0MyA0LjMzOTcyNi00LjQ5NTE0MyA0LjE3MjM1NC00LjM1MTY4MUM0LjEwMDYyMy00LjI5MTkwNSAzLjk2OTExNi00LjExMjU3OCAzLjk2OTExNi0zLjkyMTI5NUMzLjk2OTExNi0zLjY4MjE5MiA0LjE0ODQ0My0zLjUzODczIDQuMzc1NTkyLTMuNTM4NzNDNC42NjI1MTYtMy41Mzg3MyA0Ljk4NTMwNS0zLjc3NzgzMyA0Ljk4NTMwNS00LjI1NjA0QzQuOTg1MzA1LTQuODI5ODg4IDQuNDM1MzY3LTUuMjcyMjI5IDMuNjEwNDYxLTUuMjcyMjI5QzIuMDQ0MzM0LTUuMjcyMjI5IC40NzgyMDctMy41NjI2NCAuNDc4MjA3LTEuODY1MDA2Qy40NzgyMDctLjgyNDkwNyAxLjEyMzc4NiAuMTE5NTUyIDIuMzQzMjEzIC4xMTk1NTJDMy45NjkxMTYgLjExOTU1MiA0Ljk5NzI2LTEuMTQ3Njk2IDQuOTk3MjYtMS4zMDMxMTNDNC45OTcyNi0xLjM3NDg0NCA0LjkyNTUyOS0xLjQzNDYyIDQuODc3NzA5LTEuNDM0NjJDNC44NDE4NDMtMS40MzQ2MiA0LjgyOTg4OC0xLjQyMjY2NSA0LjcyMjI5MS0xLjMxNTA2OEMzLjk1NzE2MS0uMjk4ODc5IDIuODIxNDItLjExOTU1MiAyLjM2NzEyMy0uMTE5NTUyQzEuNTQyMjE3LS4xMTk1NTIgMS4yNzkyMDMtLjgzNjg2MiAxLjI3OTIwMy0xLjQzNDYyQzEuMjc5MjAzLTEuODUzMDUxIDEuNDgyNDQxLTMuMDEyNzAyIDEuOTEyODI3LTMuODI1NjU0QzIuMjIzNjYxLTQuMzg3NTQ3IDIuODY5MjQtNS4wMzMxMjYgMy42MjI0MTYtNS4wMzMxMjZDMy43Nzc4MzMtNS4wMzMxMjYgNC40MzUzNjctNS4wMDkyMTUgNC42NzQ0NzEtNC40OTUxNDNaJy8+CjxwYXRoIGlkPSdnMS0xMTEnIGQ9J001LjQ1MTU1Ny0zLjI4NzY3MUM1LjQ1MTU1Ny00LjQyMzQxMiA0LjcxMDMzNi01LjI3MjIyOSAzLjYyMjQxNi01LjI3MjIyOUMyLjA0NDMzNC01LjI3MjIyOSAuNDkwMTYyLTMuNTUwNjg1IC40OTAxNjItMS44NjUwMDZDLjQ5MDE2Mi0uNzI5MjY1IDEuMjMxMzgyIC4xMTk1NTIgMi4zMTkzMDMgLjExOTU1MkMzLjkwOTM0IC4xMTk1NTIgNS40NTE1NTctMS42MDE5OTMgNS40NTE1NTctMy4yODc2NzFaTTIuMzMxMjU4LS4xMTk1NTJDMS43MzM0OTktLjExOTU1MiAxLjI5MTE1OC0uNTk3NzU4IDEuMjkxMTU4LTEuNDM0NjJDMS4yOTExNTgtMS45ODQ1NTggMS41NzgwODItMy4yMDM5ODUgMS45MTI4MjctMy44MDE3NDNDMi40NTA4MDktNC43MjIyOTEgMy4xMjAyOTktNS4wMzMxMjYgMy42MTA0NjEtNS4wMzMxMjZDNC4xOTYyNjQtNS4wMzMxMjYgNC42NTA1Ni00LjU1NDkxOSA0LjY1MDU2LTMuNzE4MDU3QzQuNjUwNTYtMy4yMzk4NTEgNC4zOTk1MDItMS45NjA2NDggMy45NDUyMDUtMS4yMzEzODJDMy40NTUwNDQtLjQzMDM4NiAyLjc5NzUwOS0uMTE5NTUyIDIuMzMxMjU4LS4xMTk1NTJaJy8+CjxwYXRoIGlkPSdnMS0xMTgnIGQ9J001LjQ2MzUxMi00LjQ3MTIzM0M1LjQ2MzUxMi01LjIyNDQwOCA1LjA4MDk0Ni01LjI3MjIyOSA0Ljk4NTMwNS01LjI3MjIyOUM0LjY5ODM4MS01LjI3MjIyOSA0LjQzNTM2Ny00Ljk4NTMwNSA0LjQzNTM2Ny00Ljc0NjIwMkM0LjQzNTM2Ny00LjYwMjc0IDQuNTE5MDU0LTQuNTE5MDU0IDQuNTY2ODc0LTQuNDcxMjMzQzQuNjg2NDI2LTQuMzYzNjM2IDQuOTk3MjYtNC4wNDA4NDcgNC45OTcyNi0zLjQxOTE3OEM0Ljk5NzI2LTIuOTE3MDYxIDQuMjc5OTUtLjExOTU1MiAyLjg0NTMzLS4xMTk1NTJDMi4xMTYwNjUtLjExOTU1MiAxLjk3MjYwMy0uNzI5MjY1IDEuOTcyNjAzLTEuMTcxNjA2QzEuOTcyNjAzLTEuNzY5MzY1IDIuMjQ3NTcyLTIuNjA2MjI3IDIuNTcwMzYxLTMuNDY2OTk5QzIuNzYxNjQ0LTMuOTU3MTYxIDIuODA5NDY1LTQuMDc2NzEyIDIuODA5NDY1LTQuMzE1ODE2QzIuODA5NDY1LTQuODE3OTMzIDIuNDUwODA5LTUuMjcyMjI5IDEuODY1MDA2LTUuMjcyMjI5Qy43NjUxMzEtNS4yNzIyMjkgLjMyMjc5LTMuNTM4NzMgLjMyMjc5LTMuNDQzMDg4Qy4zMjI3OS0zLjM5NTI2OCAuMzcwNjEtMy4zMzU0OTIgLjQ1NDI5Ni0zLjMzNTQ5MkMuNTYxODkzLTMuMzM1NDkyIC41NzM4NDgtMy4zODMzMTMgLjYyMTY2OS0zLjU1MDY4NUMuOTA4NTkzLTQuNTc4ODI5IDEuMzc0ODQ0LTUuMDMzMTI2IDEuODI5MTQxLTUuMDMzMTI2QzEuOTM2NzM3LTUuMDMzMTI2IDIuMTM5OTc1LTUuMDMzMTI2IDIuMTM5OTc1LTQuNjM4NjA1QzIuMTM5OTc1LTQuMzI3NzcxIDIuMDA4NDY4LTMuOTgxMDcxIDEuODI5MTQxLTMuNTI2Nzc1QzEuMjU1MjkzLTEuOTk2NTEzIDEuMjU1MjkzLTEuNjI1OTAzIDEuMjU1MjkzLTEuMzM4OTc5QzEuMjU1MjkzLTEuMDc1OTY1IDEuMjkxMTU4LS41ODU4MDMgMS42NjE3NjgtLjI1MTA1OUMyLjA5MjE1NCAuMTE5NTUyIDIuNjg5OTEzIC4xMTk1NTIgMi43OTc1MDkgLjExOTU1MkM0Ljc4MjA2NyAuMTE5NTUyIDUuNDYzNTEyLTMuNzg5Nzg4IDUuNDYzNTEyLTQuNDcxMjMzWicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMTI0LjQ2MTQ2MicgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzEtODgnLz4KPHVzZSB4PScxMzguNDM3Mzk5JyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMC0yNCcvPgo8dXNlIHg9JzE1MS4wNTY3MjUnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2cwLTc4Jy8+Cjx1c2UgeD0nMTYyLjYyNzUzNScgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzMtNDAnLz4KPHVzZSB4PScxNjcuMTc5ODYxJyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMS0yMicvPgo8dXNlIHg9JzE3Ny41NDM2NjEnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2czLTYxJy8+Cjx1c2UgeD0nMTg5Ljk2OTE0MicgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzMtOTEnLz4KPHVzZSB4PScxOTMuMjIwODAzJyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMy00OCcvPgo8dXNlIHg9JzE5OS4wNzM3OTMnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2cxLTU4Jy8+Cjx1c2UgeD0nMjAyLjMyNTQ1NScgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzMtNTAnLz4KPHVzZSB4PScyMDguMTc4NDQ1JyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMy01MycvPgo8dXNlIHg9JzIxNC4wMzE0MzUnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2cxLTU5Jy8+Cjx1c2UgeD0nMjE5LjI3NTU5NCcgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzMtNDgnLz4KPHVzZSB4PScyMjUuMTI4NTg0JyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMS01OCcvPgo8dXNlIHg9JzIyOC4zODAyNDYnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2czLTUwJy8+Cjx1c2UgeD0nMjM0LjIzMzIzNicgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzMtNTMnLz4KPHVzZSB4PScyNDAuMDg2MjI2JyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMy05MycvPgo8dXNlIHg9JzI0My4zMzc4ODcnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2cxLTU5Jy8+Cjx1c2UgeD0nMjQ4LjU4MjA0NicgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzEtMjcnLz4KPHVzZSB4PScyNTguOTg1MjgnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2czLTYxJy8+Cjx1c2UgeD0nMjcxLjQxMDc2JyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMy05MScvPgo8dXNlIHg9JzI3NC42NjI0MjInIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2czLTQ5Jy8+Cjx1c2UgeD0nMjgwLjUxNTQxMicgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzEtNTknLz4KPHVzZSB4PScyODUuNzU5NTcxJyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMy00OScvPgo8dXNlIHg9JzI5MS42MTI1NjEnIHk9Jy00LjQ4MzI5NCcgeGxpbms6aHJlZj0nI2czLTkzJy8+Cjx1c2UgeD0nMjk0Ljg2NDIyMicgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzEtNTknLz4KPHVzZSB4PSczMDAuMTA4MzgxJyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMS05OScvPgo8dXNlIHg9JzMwNS4xNDYzNycgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzEtMTExJy8+Cjx1c2UgeD0nMzEwLjc3MzgwNycgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzEtMTE4Jy8+Cjx1c2UgeD0nMzIwLjE4Mjg1NScgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzMtNjEnLz4KPHVzZSB4PSczMzIuNjA4MzM2JyB5PSctNC40ODMyOTQnIHhsaW5rOmhyZWY9JyNnMS03MycvPgo8dXNlIHg9JzMzNy43NzEyMzgnIHk9Jy0yLjY5MDAzMScgeGxpbms6aHJlZj0nI2cyLTUwJy8+Cjx1c2UgeD0nMzQyLjUwMzU1MycgeT0nLTQuNDgzMjk0JyB4bGluazpocmVmPScjZzMtNDEnLz4KPC9nPgo8L3N2Zz4KPCEtLSBERVBUSD0wIC0tPg==)
We want to evaluate the probability:

First, import the python modules:
import openturns as ot
from openturns.viewer import View
Create the probabilistic model  ¶
¶
Create the input random vector  :
:
X = ot.RandomVector(ot.Normal([0.25] * 2, [1] * 2, ot.IdentityMatrix(2)))
Create the function  :
:
g = ot.SymbolicFunction(["x1", "x2"], ["20-(x1-x2)^2-8*(x1+x2-4)^3"])
print("function g: ", g)
function g: [x1,x2]->[20-(x1-x2)^2-8*(x1+x2-4)^3]
In order to be able to get the subset samples used in the algorithm, it is necessary to transform the SymbolicFunction into a MemoizeFunction:
g = ot.MemoizeFunction(g)
Create the output random vector :
Y = ot.CompositeRandomVector(g, X)
Create the event  ¶
¶
myEvent = ot.ThresholdEvent(Y, ot.LessOrEqual(), 0.0)
Evaluate the probability with the subset sampling technique¶
algo = ot.SubsetSampling(myEvent)
In order to get all the inputs and outputs that realize the event, you have to mention it now:
algo.setKeepEventSample(True)
Now you can run the algorithm!
algo.run()
result = algo.getResult()
proba = result.getProbabilityEstimate()
print("Proba Subset = ", proba)
print("Current coefficient of variation = ", result.getCoefficientOfVariation())
Proba Subset = 0.00040940000000000025
Current coefficient of variation = 0.08584233339124359
The length of the confidence interval of level  is:
is:
length95 = result.getConfidenceLength()
print("Confidence length (0.95) = ", result.getConfidenceLength())
Confidence length (0.95) = 0.00013776136561433357
which enables to build the confidence interval:
print(
"Confidence interval (0.95) = [",
proba - length95 / 2,
", ",
proba + length95 / 2,
"]",
)
Confidence interval (0.95) = [ 0.0003405193171928335 , 0.000478280682807167 ]
You can also get the successive thresholds used by the algorithm:
levels = algo.getThresholdPerStep()
print("Levels of g = ", levels)
Levels of g = [54.0207,18.0184,7.60975,0]
Draw the subset samples used by the algorithm¶
The following manipulations are possible onfly if you have created a MemoizeFunction that enables to store all the inputs and output of the function .
Get all the inputs where were evaluated:
inputSampleSubset = g.getInputHistory()
nTotal = inputSampleSubset.getSize()
print("Number of evaluations of g = ", nTotal)
Number of evaluations of g = 40000
Within each step of the algorithm, a sample of size  is created, where:
is created, where:
N = algo.getMaximumOuterSampling() * algo.getBlockSize()
print("Size of each subset = ", N)
Size of each subset = 10000
You can get the number  of steps with:
of steps with:
Ns = algo.getStepsNumber()
print("Number of steps= ", Ns)
Number of steps= 4
and you can verify that is equal to  :
:
print("nTotal / N = ", int(nTotal / N))
nTotal / N = 4
Now, we can split the initial sample into subset samples of size :
list_subSamples = list()
for i in range(Ns):
list_subSamples.append(inputSampleSubset[i * N: i * N + N])
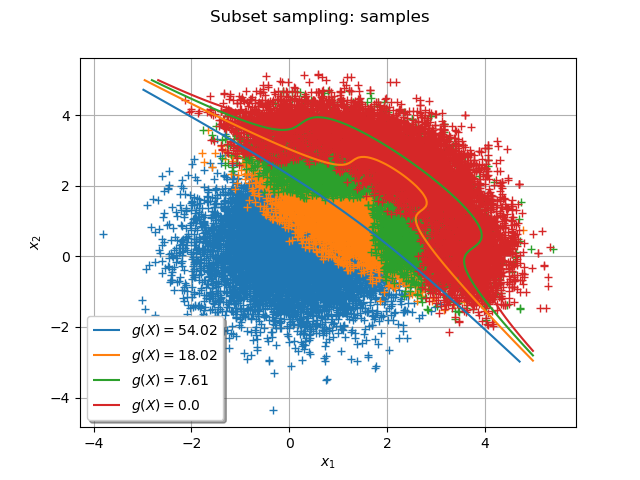
The following graph draws each subset sample and the frontier  where
where  is the threshold at the step
is the threshold at the step  :
:
graph = ot.Graph()
graph.setAxes(True)
graph.setGrid(True)
graph.setTitle("Subset sampling: samples")
graph.setXTitle(r"$x_1$")
graph.setYTitle(r"$x_2$")
graph.setLegendPosition("bottomleft")
Add all the subset samples:
for i in range(Ns):
cloud = ot.Cloud(list_subSamples[i])
# cloud.setPointStyle("dot")
graph.add(cloud)
col = ot.Drawable().BuildDefaultPalette(Ns)
graph.setColors(col)
Add the frontiers where is the threshold at the step :
gIsoLines = g.draw([-3] * 2, [5] * 2, [128] * 2)
dr = gIsoLines.getDrawable(0)
for i in range(levels.getSize()):
dr.setLevels([levels[i]])
dr.setLineStyle("solid")
dr.setLegend(r"$g(X) = $" + str(round(levels[i], 2)))
dr.setLineWidth(3)
dr.setColor(col[i])
graph.add(dr)
_ = View(graph)
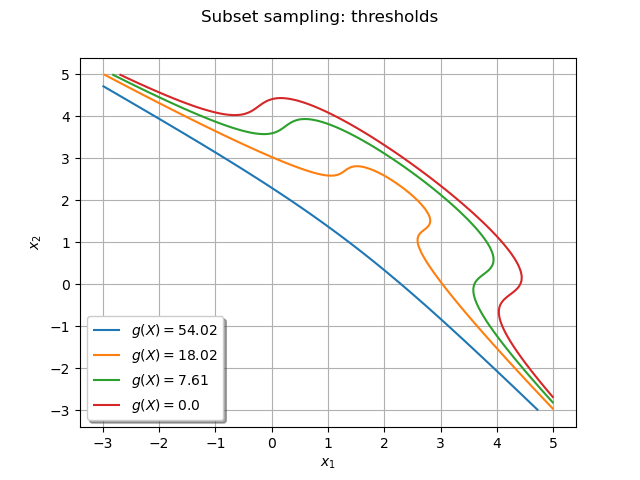
Draw the frontiers only¶
The following graph enables to understand the progresison of the algorithm:
graph = ot.Graph()
graph.setAxes(True)
graph.setGrid(True)
dr = gIsoLines.getDrawable(0)
for i in range(levels.getSize()):
dr.setLevels([levels[i]])
dr.setLineStyle("solid")
dr.setLegend(r"$g(X) = $" + str(round(levels[i], 2)))
dr.setLineWidth(3)
graph.add(dr)
graph.setColors(col)
graph.setLegendPosition("bottomleft")
graph.setTitle("Subset sampling: thresholds")
graph.setXTitle(r"$x_1$")
graph.setYTitle(r"$x_2$")
_ = View(graph)
Get all the input and output points that realized the event¶
The following lines are possible only if you have mentioned that you wanted to keep the points that realize the event with the method algo.setKeepEventSample(True)
inputEventSample = algo.getEventInputSample()
outputEventSample = algo.getEventOutputSample()
print("Number of event realizations = ", inputEventSample.getSize())
Number of event realizations = 4094
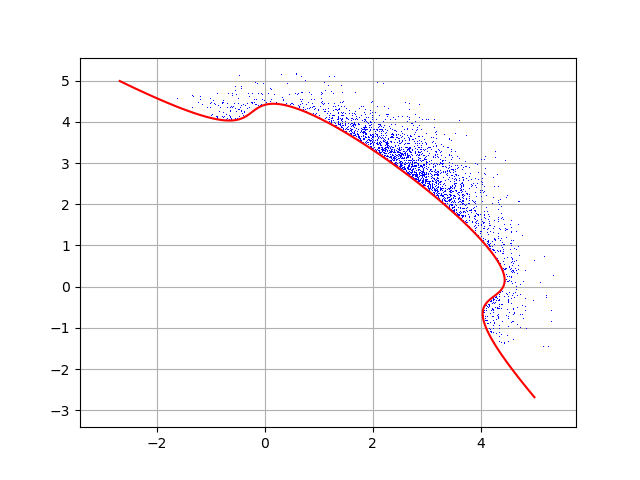
Draw them! They are all in the event space.
graph = ot.Graph()
graph.setAxes(True)
graph.setGrid(True)
cloud = ot.Cloud(inputEventSample)
cloud.setPointStyle("dot")
graph.add(cloud)
gIsoLines = g.draw([-3] * 2, [5] * 2, [1000] * 2)
dr = gIsoLines.getDrawable(0)
dr.setLevels([0.0])
dr.setColor("red")
graph.add(dr)
_ = View(graph)