Note
Go to the end to download the full example code.
R-S analysis and 2D graphics¶
The objective of this example is to present the R-S problem. We also present graphic elements for the visualization of the limit state surface in 2 dimensions.
import openturns as ot
import openturns.viewer as otv
import otbenchmark as otb
problem = otb.RminusSReliability()
event = problem.getEvent()
g = event.getFunction()
problem.getProbability()
0.07864960352514257
Create the Monte-Carlo algorithm
algoProb = ot.ProbabilitySimulationAlgorithm(event)
algoProb.setMaximumOuterSampling(1000)
algoProb.setMaximumCoefficientOfVariation(0.01)
algoProb.run()
Get the results
resultAlgo = algoProb.getResult()
neval = g.getEvaluationCallsNumber()
print("Number of function calls = %d" % (neval))
pf = resultAlgo.getProbabilityEstimate()
print("Failure Probability = %.4f" % (pf))
level = 0.95
c95 = resultAlgo.getConfidenceLength(level)
pmin = pf - 0.5 * c95
pmax = pf + 0.5 * c95
print("%.1f %% confidence interval :[%.4f,%.4f] " % (level * 100, pmin, pmax))
Number of function calls = 1000
Failure Probability = 0.0860
95.0 % confidence interval :[0.0686,0.1034]
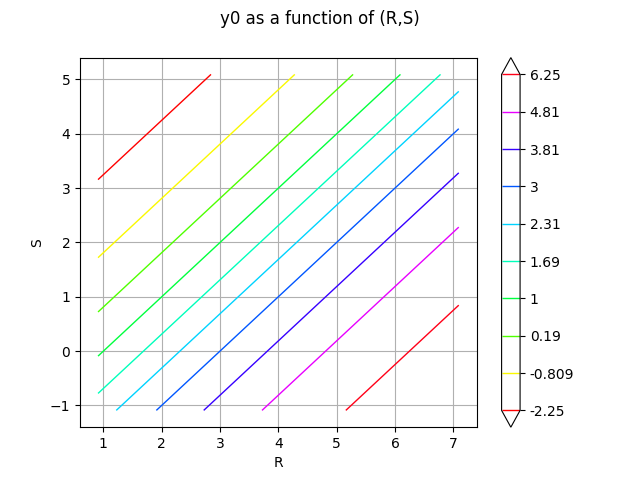
Plot the contours of the function¶
inputVector = event.getAntecedent()
distribution = inputVector.getDistribution()
R = distribution.getMarginal(0)
S = distribution.getMarginal(1)
alphaMin = 0.001
alphaMax = 1 - alphaMin
lowerBound = ot.Point([R.computeQuantile(alphaMin)[0], S.computeQuantile(alphaMin)[0]])
upperBound = ot.Point([R.computeQuantile(alphaMax)[0], S.computeQuantile(alphaMax)[0]])
nbPoints = [100, 100]
_ = otv.View(g.draw(lowerBound, upperBound, nbPoints))
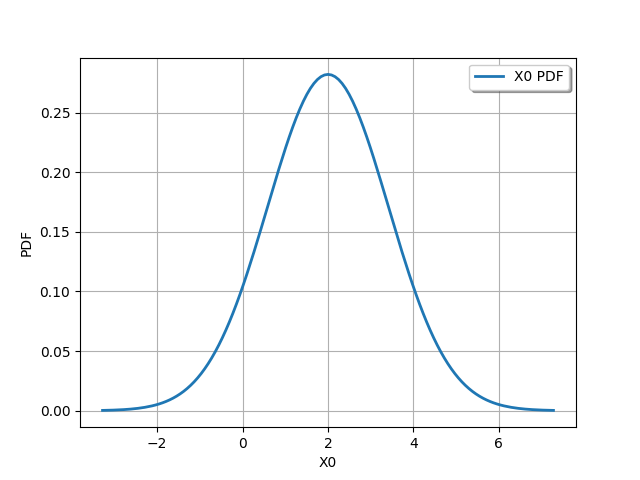
Y = R - S
Y
_ = otv.View(Y.drawPDF())
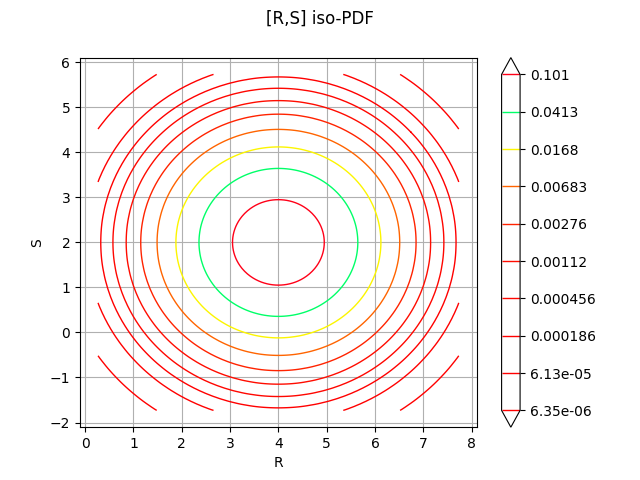
Print the iso-values of the distribution¶
_ = otv.View(distribution.drawPDF())
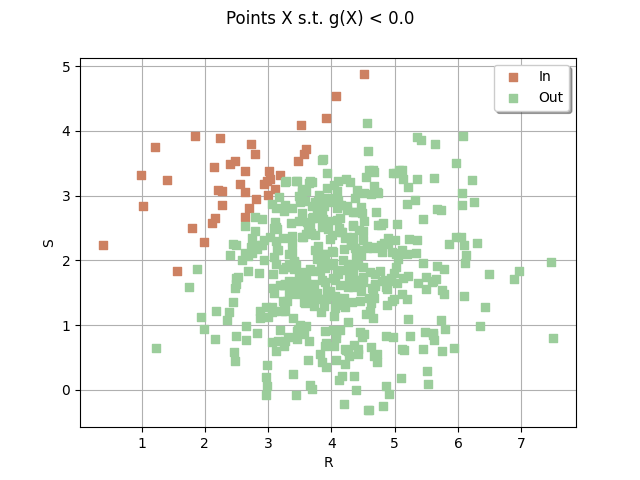
Visualise the safe and unsafe regions on a sample¶
sampleSize = 500
drawEvent = otb.DrawEvent(event)
cloud = drawEvent.drawSampleCrossCut(sampleSize)
_ = otv.View(cloud)
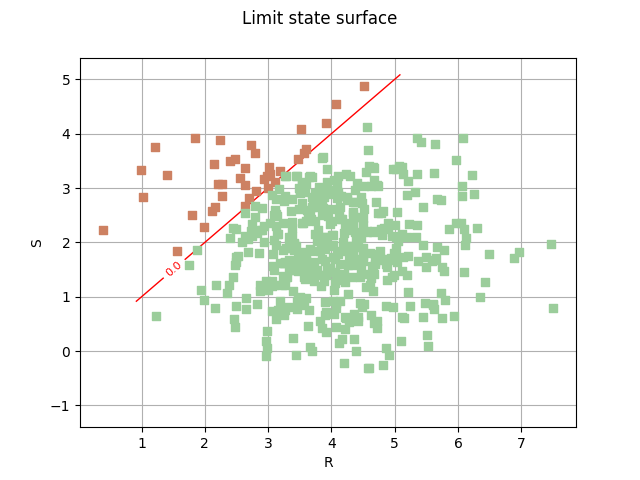
Draw the limit state surface¶
bounds = ot.Interval(lowerBound, upperBound)
bounds
graph = drawEvent.drawLimitStateCrossCut(bounds)
graph.add(cloud)
_ = otv.View(graph)
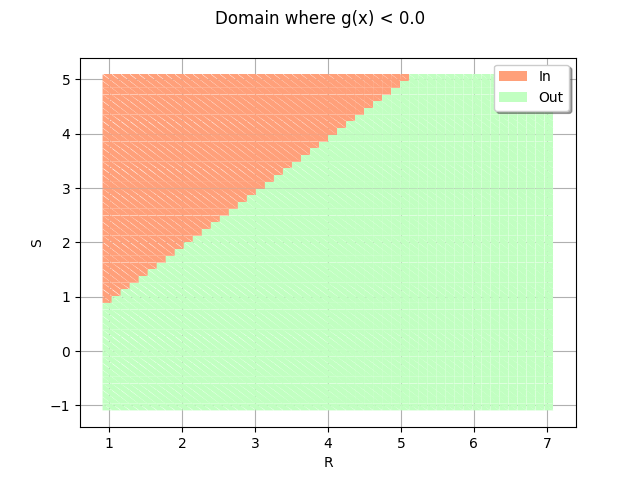
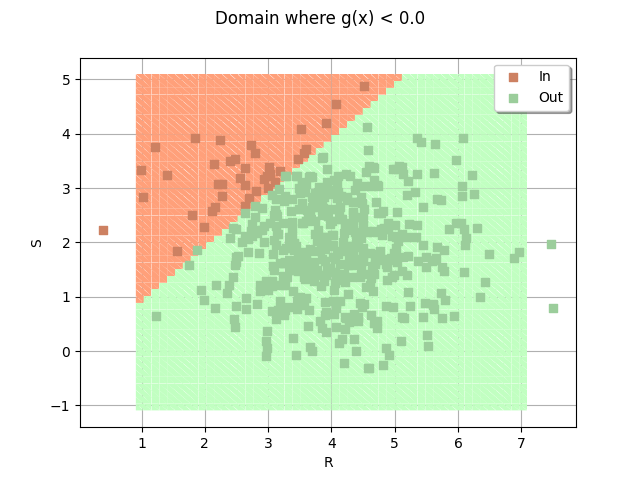
Fill the event domain with a color¶
domain = drawEvent.fillEventCrossCut(bounds)
_ = otv.View(domain)
domain.setLegends(["", ""])
domain.add(cloud)
_ = otv.View(domain)
otv.View.ShowAll()
Total running time of the script: (0 minutes 3.171 seconds)