Less¶
- class Less(*args)¶
Less comparison operator.
See also
Examples
>>> import openturns as ot >>> operator = ot.Less() >>> print(operator(1, 2)) True >>> print(operator(2, 1)) False >>> print(operator(2, 2)) False
Methods
Accessor to the object's name.
getName()Accessor to the object's name.
hasName()Test if the object is named.
setName(name)Accessor to the object's name.
- __init__(*args)¶
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- hasName()¶
Test if the object is named.
- Returns:
- hasNamebool
True if the name is not empty.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
Examples using the class¶
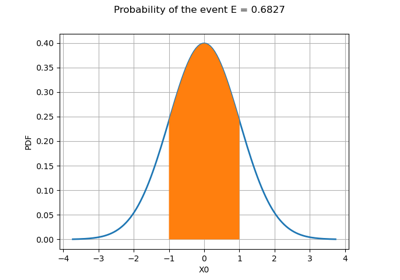
Estimate a probability with Monte-Carlo on axial stressed beam: a quick start guide to reliability
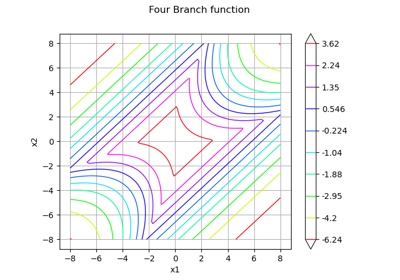
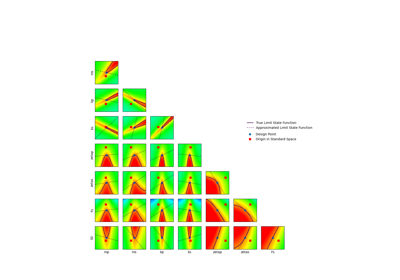
Use the FORM algorithm in case of several design points
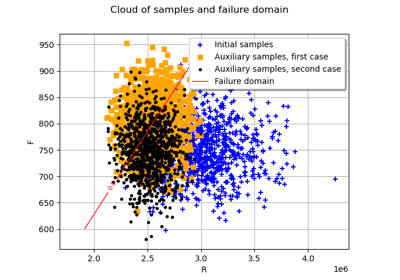
Non parametric Adaptive Importance Sampling (NAIS)
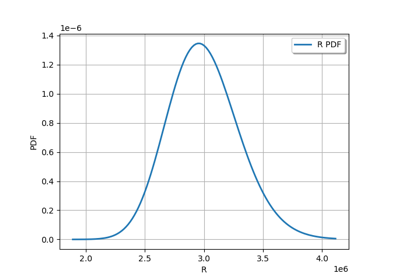
Axial stressed beam : comparing different methods to estimate a probability
Using the FORM - SORM algorithms on a nonlinear function