InterfaceObject¶
- class InterfaceObject(*args, **kwargs)¶
Methods
Accessor to the object's name.
getId()Accessor to the object's id.
getName()Accessor to the object's name.
setName(name)Accessor to the object's name.
- __init__(*args, **kwargs)¶
- getClassName()¶
Accessor to the object’s name.
- Returns:
- class_namestr
The object class name (object.__class__.__name__).
- getId()¶
Accessor to the object’s id.
- Returns:
- idint
Internal unique identifier.
- getName()¶
Accessor to the object’s name.
- Returns:
- namestr
The name of the object.
- setName(name)¶
Accessor to the object’s name.
- Parameters:
- namestr
The name of the object.
Examples using the class¶
A quick start guide to the Point and Sample classes
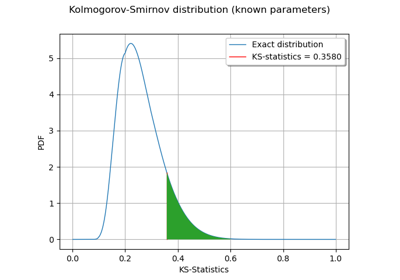
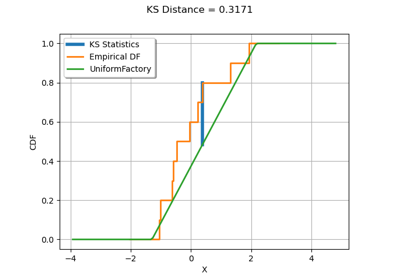
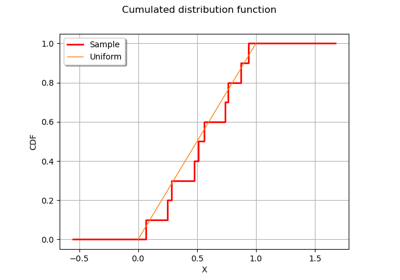
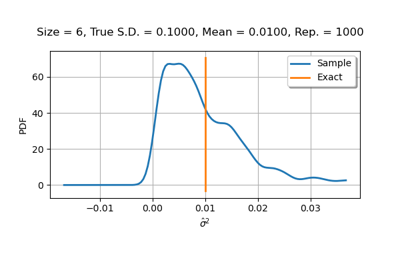
Kolmogorov-Smirnov : get the statistics distribution
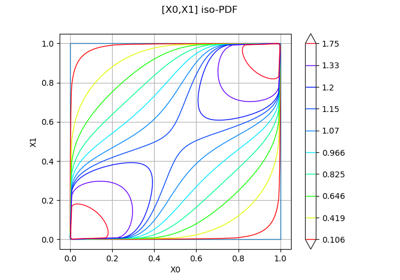
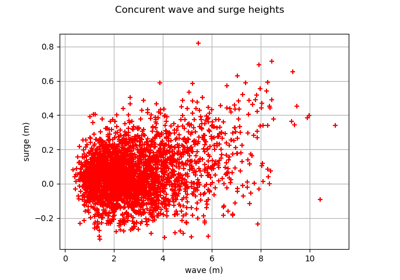
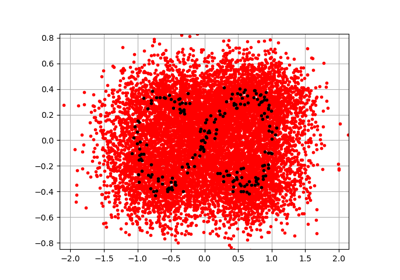
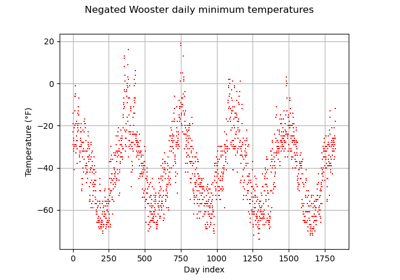
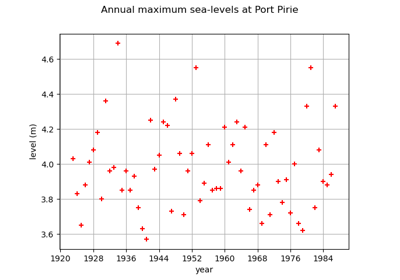
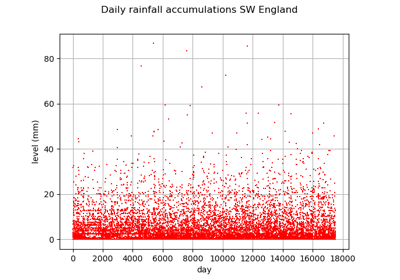
Estimate tail dependence coefficients on the wave-surge data
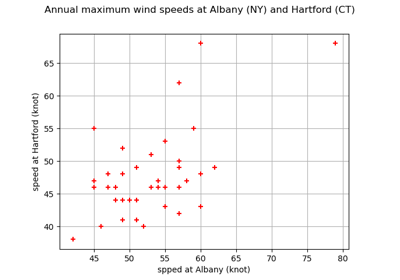
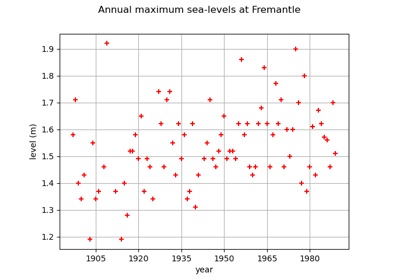
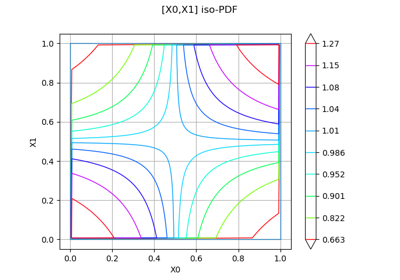
Estimate tail dependence coefficients on the wind data
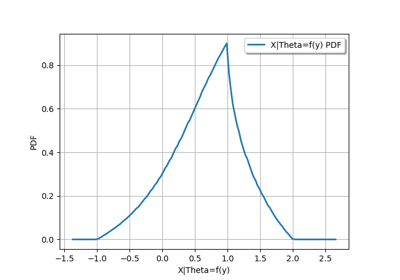
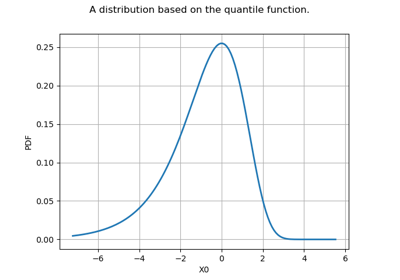
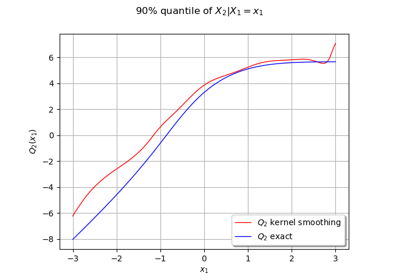
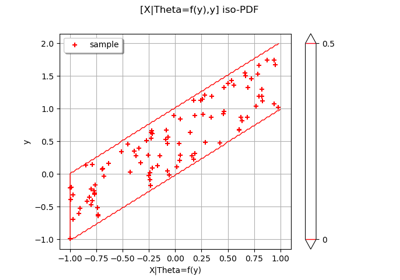
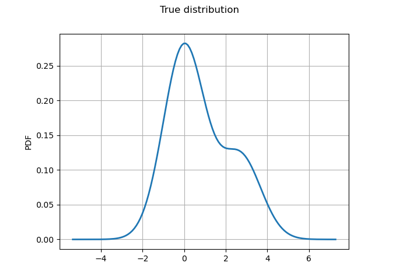
Create your own distribution given its quantile function
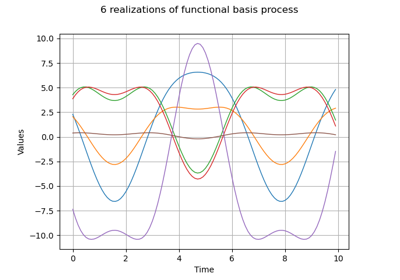
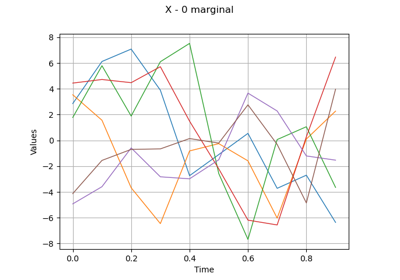
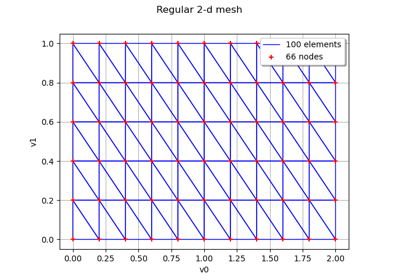
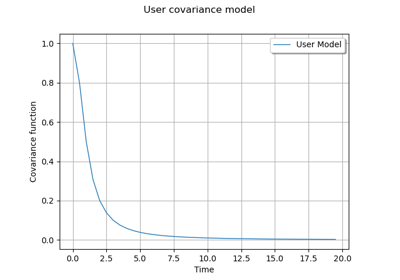
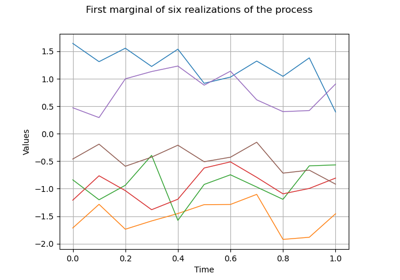
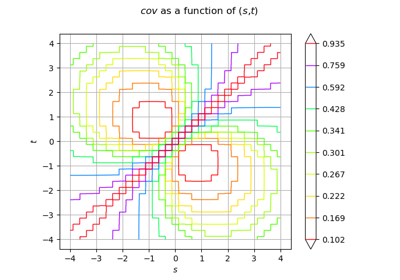
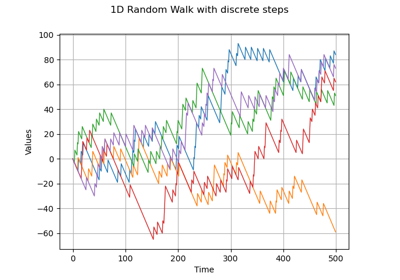
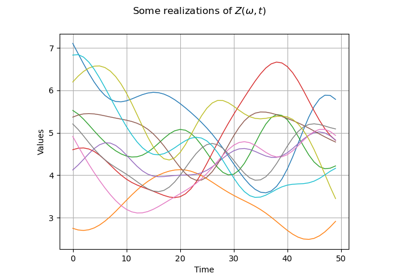
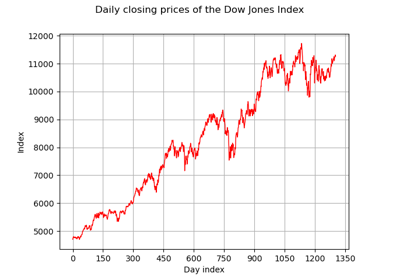
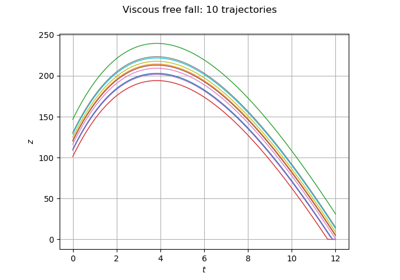
Create a process from random vectors and processes
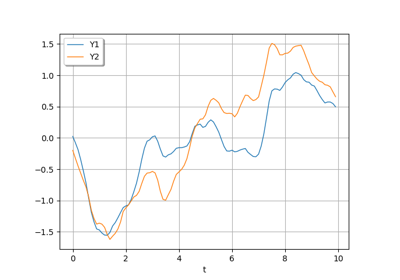
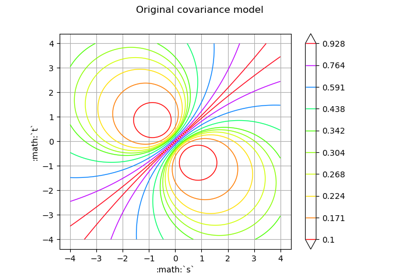
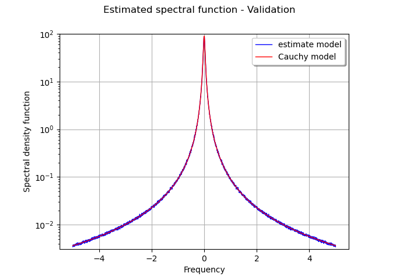
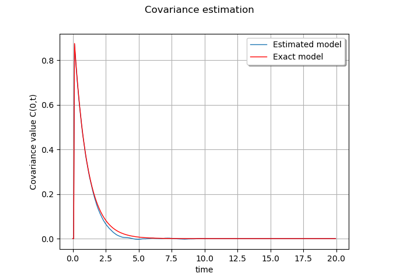
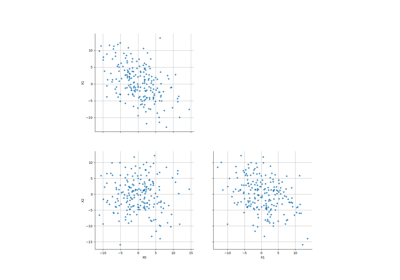
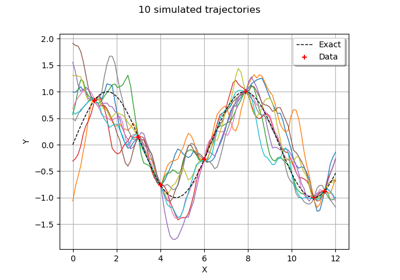
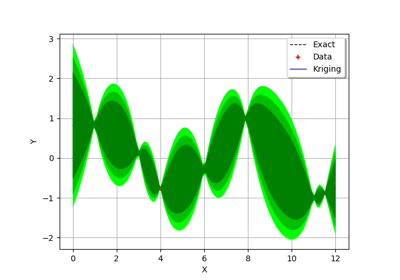
Sample trajectories from a Gaussian Process with correlated outputs
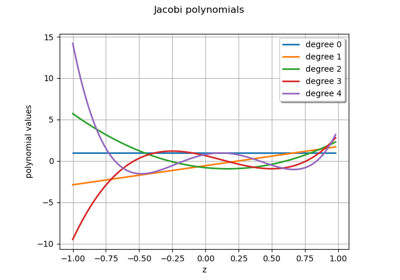
Apply a transform or inverse transform on your polynomial chaos
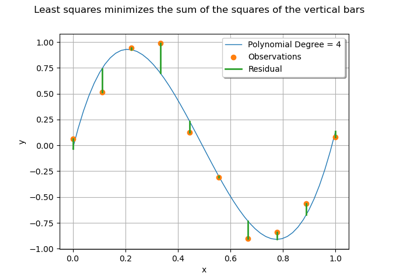
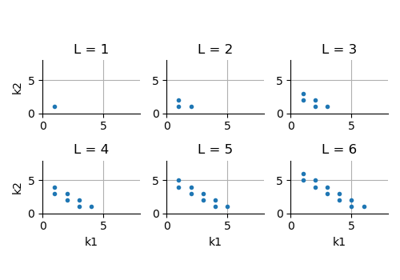
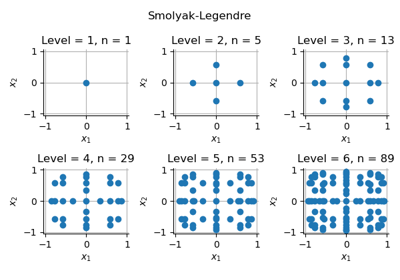
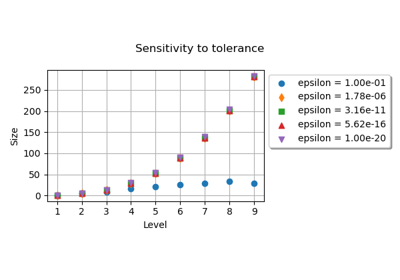
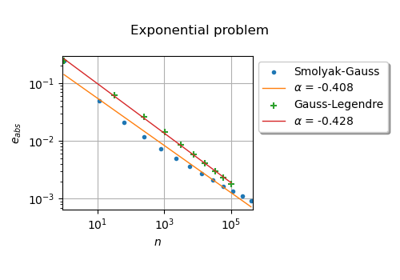
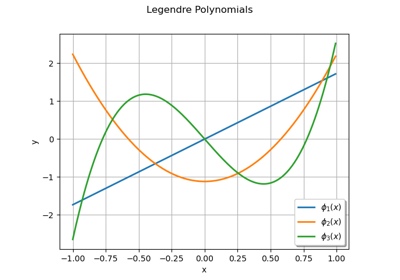
Create a full or sparse polynomial chaos expansion
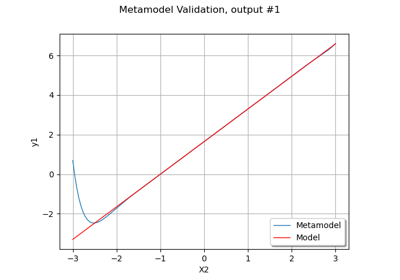
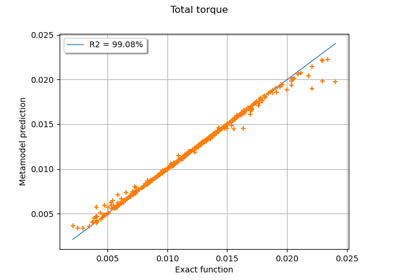
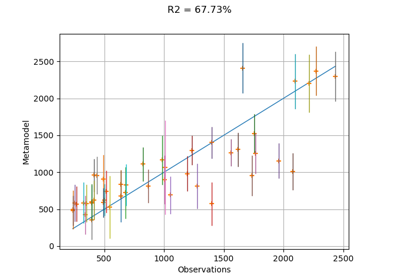
Create a polynomial chaos metamodel from a data set
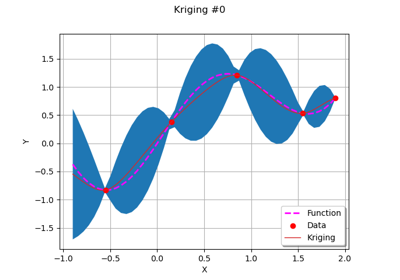
Create a polynomial chaos for the Ishigami function: a quick start guide to polynomial chaos
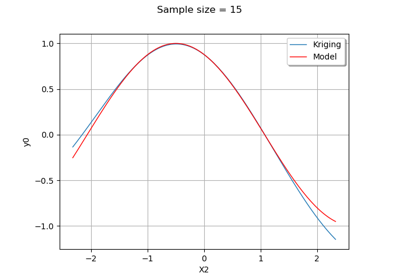
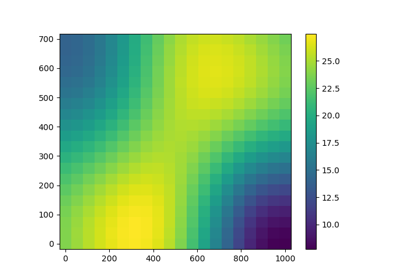
Example of multi output Kriging on the fire satellite model
Kriging: metamodel with continuous and categorical variables
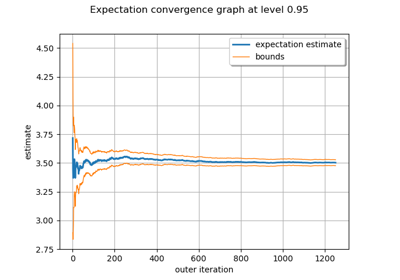
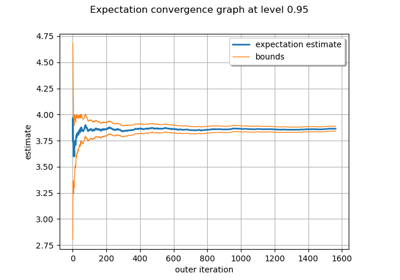
Evaluate the mean of a random vector by simulations
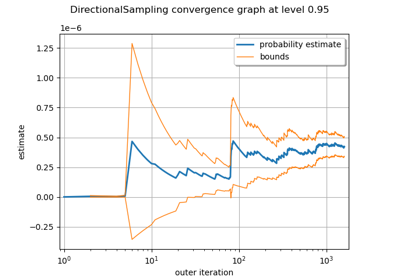
Use the Adaptive Directional Stratification Algorithm
Use the post-analytical importance sampling algorithm
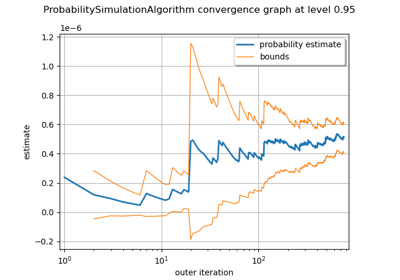
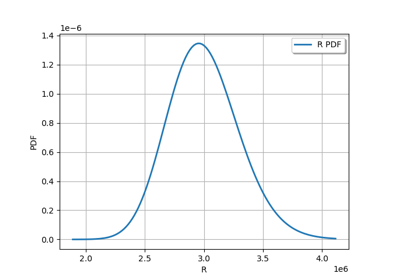
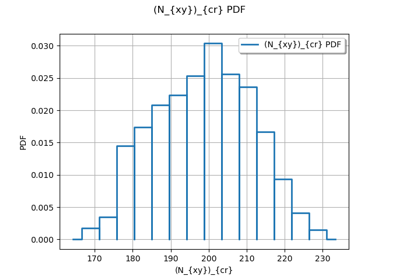
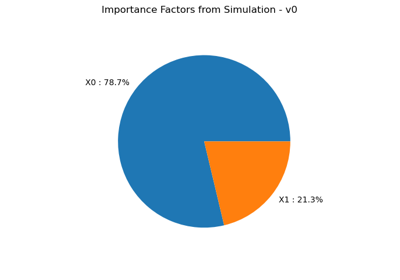
Estimate a probability with Monte-Carlo on axial stressed beam: a quick start guide to reliability
Use the FORM algorithm in case of several design points
Non parametric Adaptive Importance Sampling (NAIS)
Test the design point with the Strong Maximum Test
Axial stressed beam : comparing different methods to estimate a probability
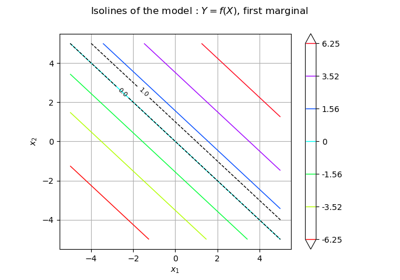
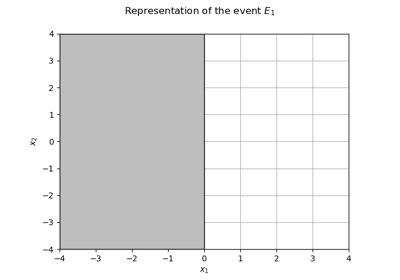
An illustrated example of a FORM probability estimate
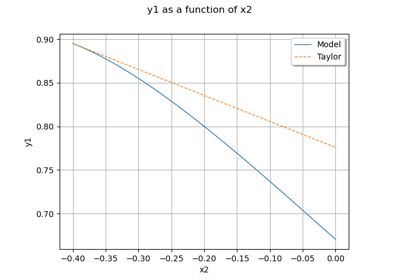
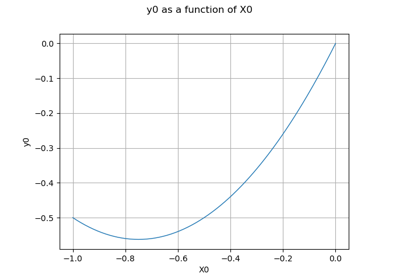
Using the FORM - SORM algorithms on a nonlinear function
Estimate Sobol indices on a field to point function
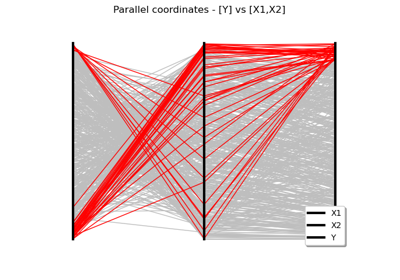
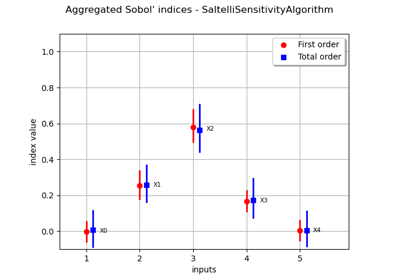
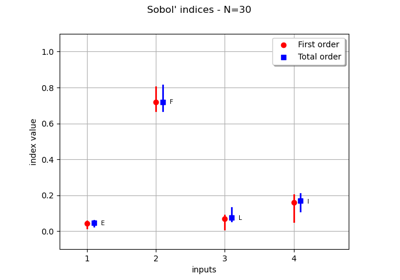
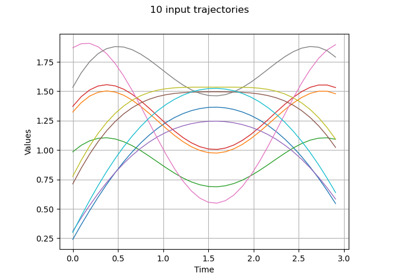
Estimate Sobol’ indices for a function with multivariate output
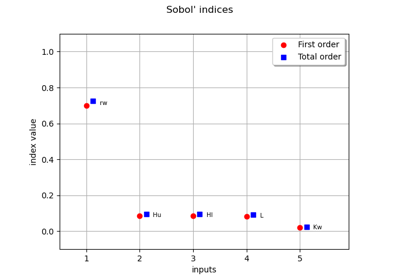
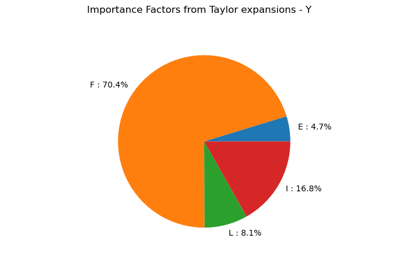
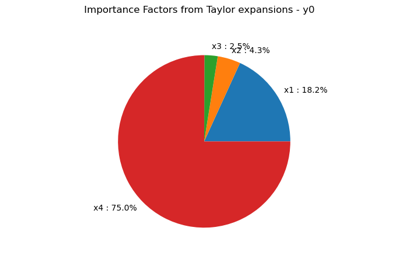
Example of sensitivity analyses on the wing weight model
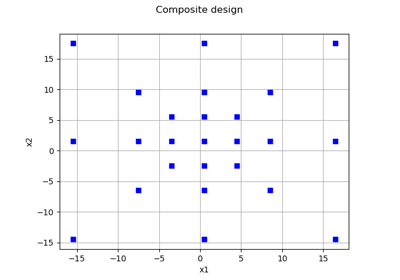
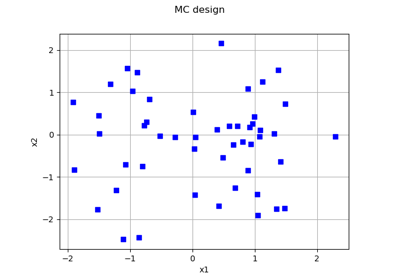
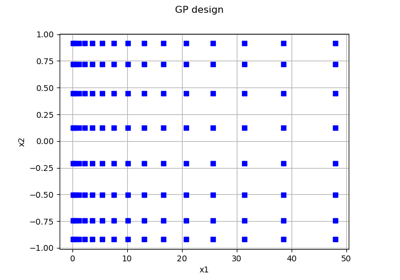
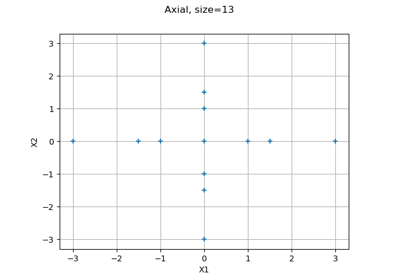
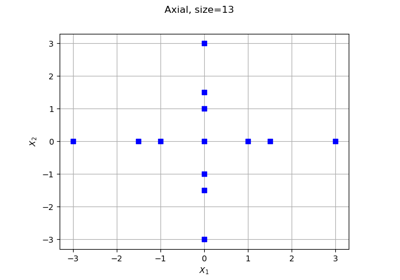
Create mixed deterministic and probabilistic designs of experiments
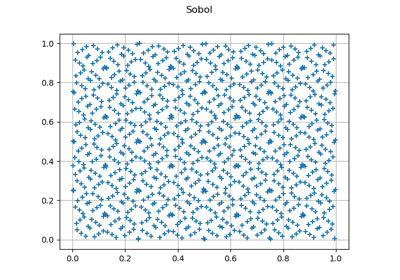
Create a design of experiments with discrete and continuous variables
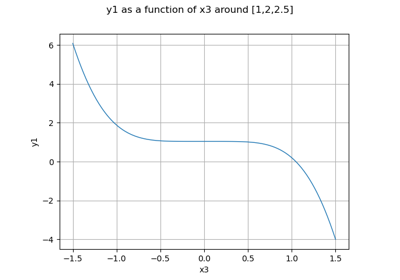
Defining Python and symbolic functions: a quick start introduction to functions
Create a multivariate basis of functions from scalar multivariable functions
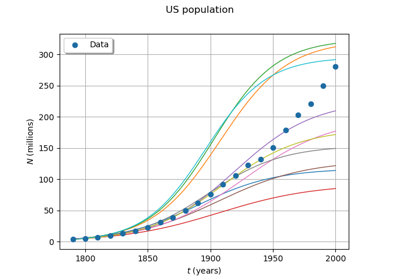
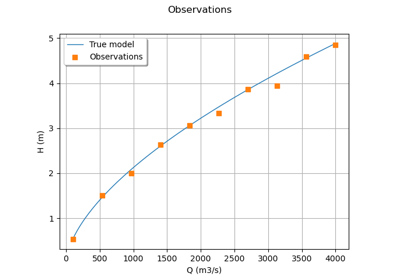
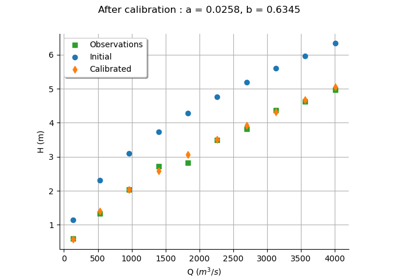
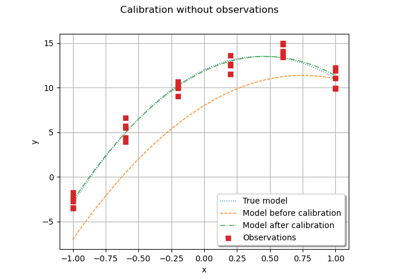
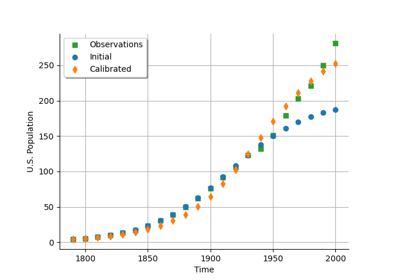
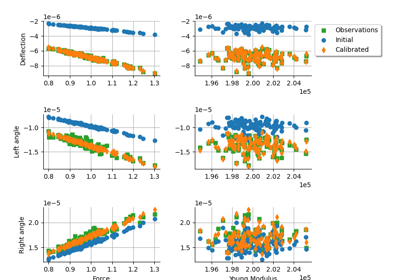
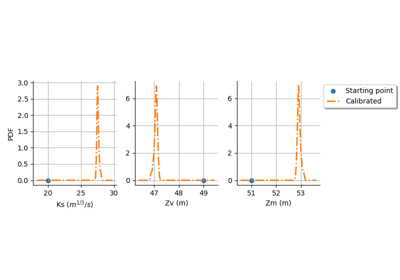
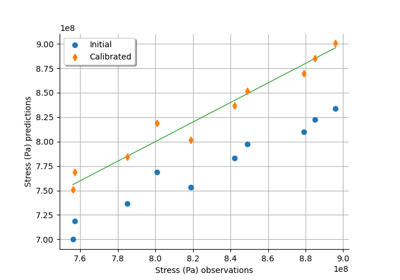
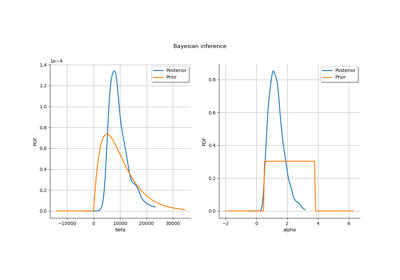
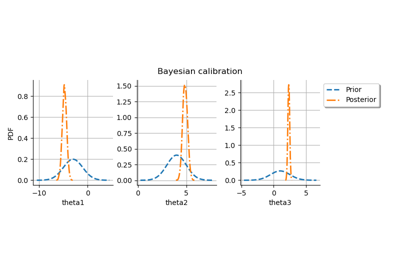
Calibrate a parametric model: a quick-start guide to calibration
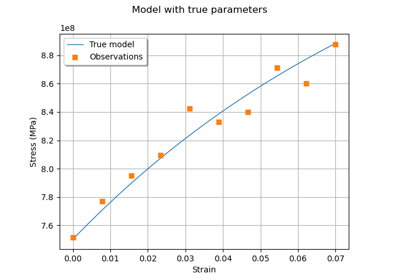
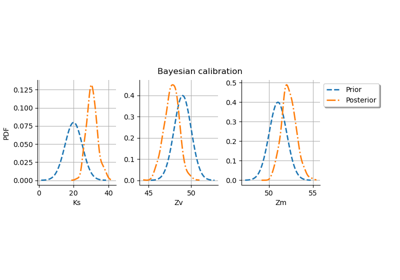
Generate observations of the Chaboche mechanical model
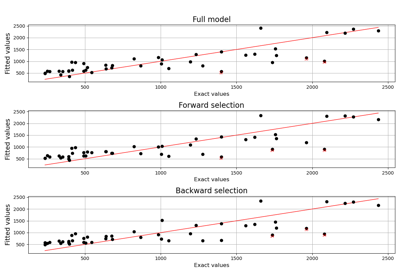
Linear Regression with interval-censored observations
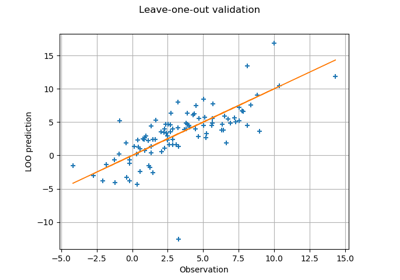
Compute leave-one-out error of a polynomial chaos expansion
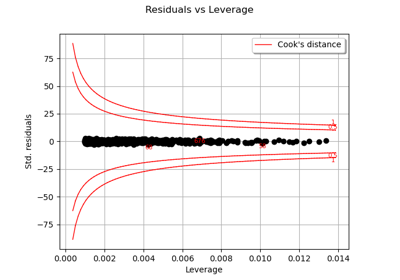
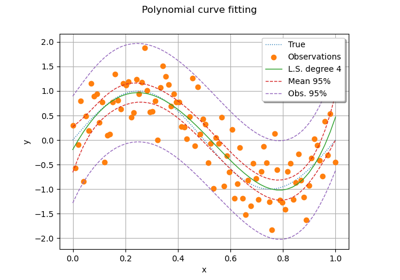
Compute confidence intervals of a regression model from data
Compute confidence intervals of a univariate noisy function
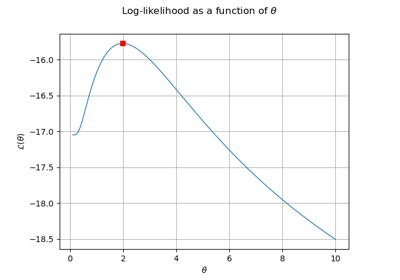
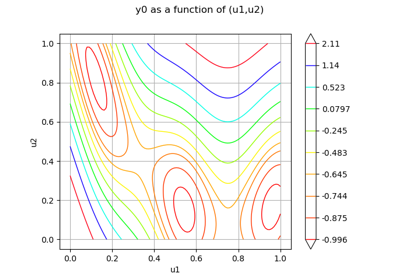
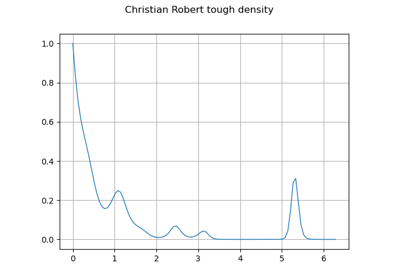
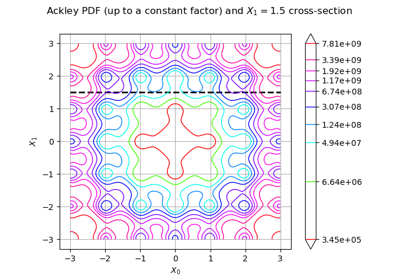
Plot the log-likelihood contours of a distribution